
Червячный рулевой механизм
Например, – основная часть рулевого управления, которая выполняет следующие функции:
Получение усилия от рулевого колеса;
Увеличение полученного усилия;
Дальнейшая передача усилия на рулевой привод;
Возврат руля в среднее положение после снятия усилия от водителя.
Рулевой механизм ВАЗ , по своей сути, является механическим редуктором (передачей), поэтому главным его параметром считается передаточное число. По типу механической передачи можно различить следующие виды рулевых механизмов: червячный, винтовой и реечный.
Наиболее распространенным типом механизма, которым оборудуются легковые автомобили, является реечный вариант. Включает в себя реечный механизм рулевую рейку и шестерню. На нижнее окончание вала рулевого колеса устанавливается шестерня, которая заходит в зацеплении с рулевой рейкой. При вращении водителем рулевого колеса, рейка, благодаря зацеплению с шестерней, вращается в нужную сторону.
Данный тип рулевого механизма выгодно отличается от других простотой конструкции, высокой жесткостью и большим КПД. Но имеет этот тип механизма и недостатки — он чувствителен к ударным нагрузкам и склонен к вибрации. В большинстве случаев, ввиду своих конструкционных особенностей, реечный механизм ставиться на автомобили с приводом на переднюю пару колес.
Этот вид механизма состоит из червяка, который соединен с валом руля и ролика. Принцип работы: к валу ролика, который находится вне корпуса механизма руля, устанавливается сошка (рычаг), которая связана с рулевыми тягами привода. Вращая рулевое колесо, происходит обкатывание ролика по глобоидному червяку, качание сошки и последующее перемещение рулевых тяг, чем и достигается поворот колес автомобиля. Что касается отличий, то червячный механизм менее чувствителен к ударам от подвески и способен обеспечивать большие поворотные углы, что в свою очередь повышает общую маневренность автомобиля.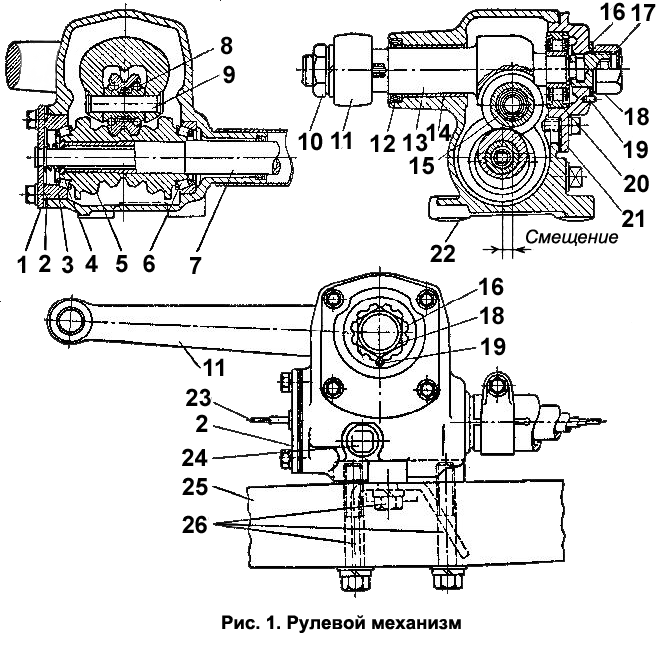
Червячный механизм зачастую применяется на автомобилях с повышенной проходимостью. Ранее данный тип механизма ставился на все отечественные легковые авто.
Винтовой рулевой механизм
Этот вид рулевого механизма объединяет в себе следующие элементы: винт, устанавливаемый на вал руля, гайку, движимую по винту, рейку зубчатого типа, нарезанную на гайке, зубчатый сектор и рулевую сошку, которая располагается на валу зубчатого сектора. Главной особенностью винтового механизма является соединение винта и гайки при помощи шариков, что уменьшает износ рабочей пары. Работа винтового механизма аналогична работе червячного варианта рулевого механизма. При повороте руля происходит вращение винта, который двигает гайку. Далее гайка через зубчатую рейку передвигает сектор и рулевую сошку.
Такой тип механизма используется на автобусах, тяжеловесных грузовых автомобилях и отдельных легковых авто представительского класса.
1 — сошка; 2 и 17- уплотнительные манжеты; 3 — упорное кольцо; 4 — подшипник вала сектора; 5 — картер; 6 — гайка-рейка; 7 — зубчатый сектор; 8 — регулировочные прокладки; 9 — болт крепления крышки; 10 — нижняя крышка; 11 — подшипник винта; 12 — винт; 13 и 15- направляющие шариков; 14 — шарики; 16 — пробка отверстия для заливки масла; 18 — опорная пластина: 19 — гайка регулировочного винта; 20 — боковая крышка картера: 21 — контргайка; 22 — регулировочный винт.
ФГОУ СПО «Нижегородский автотранспортный техникум»
Реферат на тему:
Червячное рулевое управление с гидроприводом
Выполнил:
Студент группы 3Р-08 Конакин.С.В
Проверил:
Драницын. Е.Д
Нижний Новгород
Рулевое
управление служит для обеспечения движения
автомобиля в заданном водителем
направлении. Рулевое управление состоит
из рулевого механизма и рулевого привода.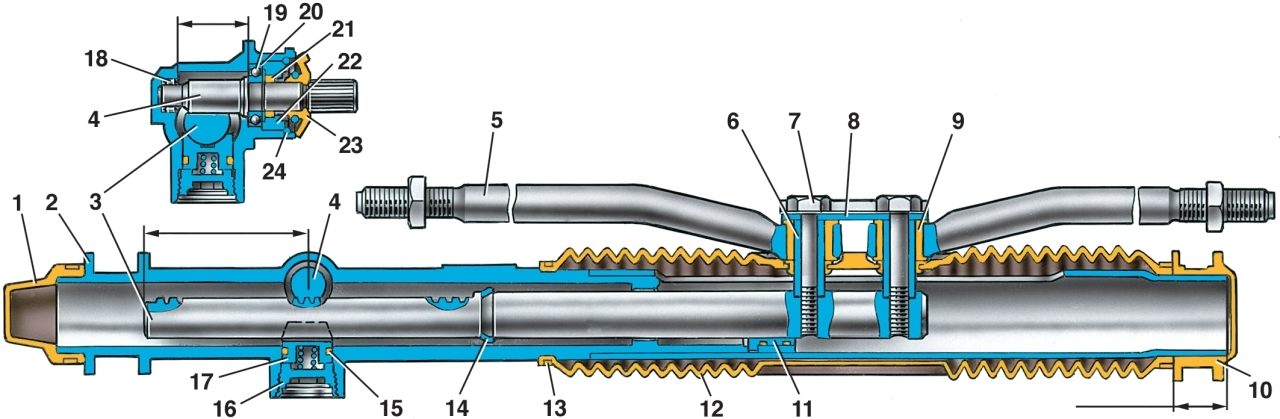
Червячный рулевой механизм — это один из видов рулевых механизмов, входит в состав рулевого управления. Кроме червячного механизма руля, рулевое управление состоит еще из двух элементов: 1) рулевая колонка вместе рулевой баранкой 2) рулевой привод (так называемая трапеция).
Цельная рулевая колонка устанавливается на автомобили Ваз 2101, Ваз 2103, Ваз 2106, Ваз 2108. Цельная означает, что колонка состоит из однового рулевого вала.
Составная рулевая колонка устанавливается на автомобили Ваз 21213 (нива), Ваз 2105. Вал такой рулевой колонки состоит из промежуточных валов.
Рулевой механизм служит для увеличения и передачи на рулевой привод усилия, прилагаемого водителем к рулевому колесу. В легковых автомобилях в основном применяются рулевые механизмы червячного и реечного типа.
К достоинствам
механизма «червяк-ролик» относятся:
низкая склонность к передаче ударов от
дорожных неровностей, большие углы
поворота колес, возможность передачи
больших усилий. Недостатками являются
большое количество тяг и шарнирных
сочленений с вечно накапливающимися
люфтами, «тяжелый» и малоинформативный
руль. Минусы в итоге оказались весомее
плюсов. На современных автомобилях
такие устройства практически не
применяют.
Недостатками являются
большое количество тяг и шарнирных
сочленений с вечно накапливающимися
люфтами, «тяжелый» и малоинформативный
руль. Минусы в итоге оказались весомее
плюсов. На современных автомобилях
такие устройства практически не
применяют.
Самый распространенный на сегодняшний день — реечный рулевой механизм. Малая масса, компактность, невысокая цена, минимальное количество тяг и шарниров — все это обусловило широкое применение. Механизм «шестерня-рейка» идеально подходит для переднеприводной компоновки и подвески McPherson, обеспечивая большую легкость и точность рулевого управления. Однако тут есть и минусы: из-за простоты конструкции любой толчок от колес передается на руль. Да и для тяжелых машин такой механизм не совсем подходит.
Рулевой привод предназначен для передачи усилия от
рулевого механизма на управляемые
колеса, обеспечивая при этом их поворот
на неодинаковые углы. Если оба колеса
повернуты на одинаковую величину,
внутреннее колесо будет скрестись по
дороге (скользить боком) что будет
снижать эффективность рулевого
управления. Это скольжение, которое
также создает дополнительный нагрев и
износ колеса, может быть устранено с
помощью поворота внутреннего колеса
на больший угол, чем угол поворота
внешнего колеса. При движении на повороте
каждое из колес описывает свою окружность
отличную от другой, причем внешнее
(дальнее от центра поворота) колесо
движется по большему радиусу, чем
внутреннее. А, так как центр поворота у
них общий, то соответственно внутреннее
колесо необходимо повернуть на больший
угол, чем внешнее. Это обеспечивается
конструкцией так называемой «рулевой
трапеции», которая включает в себя
поворотные рычаги и рулевые тяги с
шарнирами. Необходимое соотношение
углов поворота колес обеспечивается
подбором угла наклона рулевых рычагов
относительно продольной оси автомобиля
и длины рулевых рычагов и поперечной
тяги.
Это скольжение, которое
также создает дополнительный нагрев и
износ колеса, может быть устранено с
помощью поворота внутреннего колеса
на больший угол, чем угол поворота
внешнего колеса. При движении на повороте
каждое из колес описывает свою окружность
отличную от другой, причем внешнее
(дальнее от центра поворота) колесо
движется по большему радиусу, чем
внутреннее. А, так как центр поворота у
них общий, то соответственно внутреннее
колесо необходимо повернуть на больший
угол, чем внешнее. Это обеспечивается
конструкцией так называемой «рулевой
трапеции», которая включает в себя
поворотные рычаги и рулевые тяги с
шарнирами. Необходимое соотношение
углов поворота колес обеспечивается
подбором угла наклона рулевых рычагов
относительно продольной оси автомобиля
и длины рулевых рычагов и поперечной
тяги.
Рулевой механизм червячного типа состоит из:
Рулевого колеса с валом,
Картера червячной пары,
Пары «червяк-ролик»,
Рулевой сошки.
В картере рулевого
механизма в постоянном зацеплении
находится пара «червяк-ролик».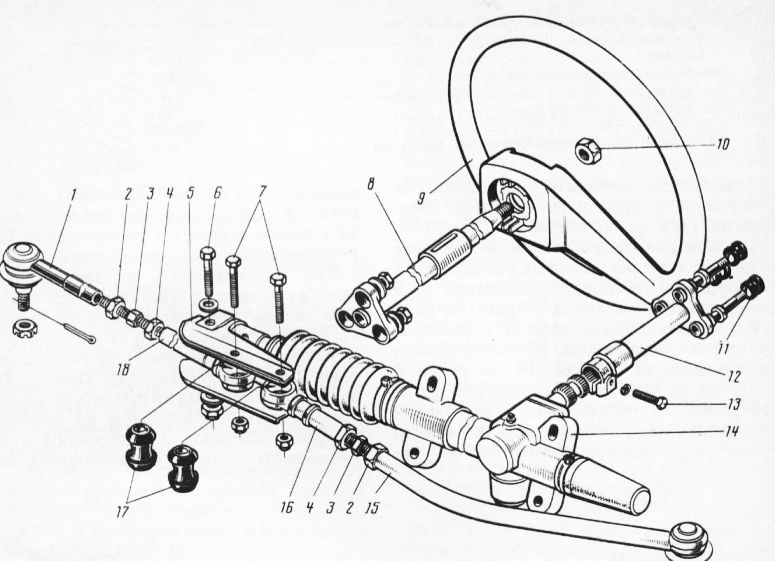
Рулевой привод, применяемый с механизмом червячного типа включает в себя:
Правую и левую боковые тяги,
Среднюю тягу,
Маятниковый рычаг,
Правый и левый
поворотные рычаги колес.
Каждая рулевая тяга на своих концах имеет шарниры, для того чтобы подвижные детали рулевого привода могли свободно поворачиваться относительно друг друга и кузова в разных плоскостях.
В рулевом механизме «шестерня- рейка » усилие к колесам передается с помощью прямозубой или косозубой шестерни, установленной в подшипниках, и зубчатой рейки, перемещающейся в направляющих втулках. Для обеспечения беззазорного зацепления рейка прижимается к шестерне пружинами. Шестерня рулевого механизма соединяется валом с рулевым колесом, а рейка — с двумя поперечными тягами, которые могут крепиться в середине или по концам рейки. Данные механизмы имеют небольшое передаточное число, что дает возможность быстро поворачивать управляемые колеса в требуемое положение. Полный поворот управляемых колес из одного крайнего положения в другое осуществляется за 1,75…2,5 оборота рулевого колеса.
Рулевой привод
состоит из двух горизонтальных тяг и
поворотных рычагов телескопических
стоек передней подвески. Тяги соединяются
с поворотными рычагами при помощи
шаровых шарниров. Поворотные рычаги
приварены к стойкам передней подвески.
Тяги передают усилие на поворотные
рычаги телескопических стоек подвески
колес и соответственно поворачивают
их вправо или влево.
Тяги соединяются
с поворотными рычагами при помощи
шаровых шарниров. Поворотные рычаги
приварены к стойкам передней подвески.
Тяги передают усилие на поворотные
рычаги телескопических стоек подвески
колес и соответственно поворачивают
их вправо или влево.
Основные неисправности рулевого управления
Увеличенный люфт рулевого колеса, а также стуки могут явиться следствием ослабления крепления картера рулевого механизма, рулевой сошки или кронштейна маятникового рычага, чрезмерного износа шарниров рулевых тяг или втулок маятникового рычага, износа передающей пары («червяк-ролик» или «шестерня-рейка») или нарушения регулировки ее зацепления. Для устранения неисправности следует подтянуть все крепления, отрегулировать зацепление в передающей паре, заменить изношенные детали.
Тугое вращение
рулевого колеса может быть из-за
неправильной регулировки зацепления
в передающей паре, отсутствия смазки в
картере рулевого механизма, нарушения
углов установки передних колес. Для
устранения неисправности необходимо
отрегулировать зацепление в передающей
паре рулевого механизма, проверить
уровень и при необходимости долить
смазку в картер, отрегулировать углы
установки передних колес в соответствии
с рекомендациями завода-изготовителя.
Для
устранения неисправности необходимо
отрегулировать зацепление в передающей
паре рулевого механизма, проверить
уровень и при необходимости долить
смазку в картер, отрегулировать углы
установки передних колес в соответствии
с рекомендациями завода-изготовителя.
Уход за рулевым управлением
Всем известно
выражение: «Лучшее лечение это –
профилактика». Поэтому каждый раз,
общаясь со своим автомобилем снизу (на
смотровой яме или эстакаде), одним из
первых дел следует проверить элементы
рулевого привода и механизма. Все
защитные резинки должны быть целы, гайки
зашплинтованы, рычаги в шарнирах не
должны болтаться, элементы рулевого
управления не должны иметь механических
повреждений и деформаций. Люфты в
шарнирах привода легко определяются,
когда помощник покачивает рулевое
колесо, а вы на ощупь, по взаимному
перемещению сочлененных деталей,
находите неисправный узел. К счастью
времена всеобщего дефицита прошли, и
есть возможность приобрести качественные
детали, а не те многочисленные подделки,
которые выходят из строя через неделю
эксплуатации, как это было в недавнем
прошлом.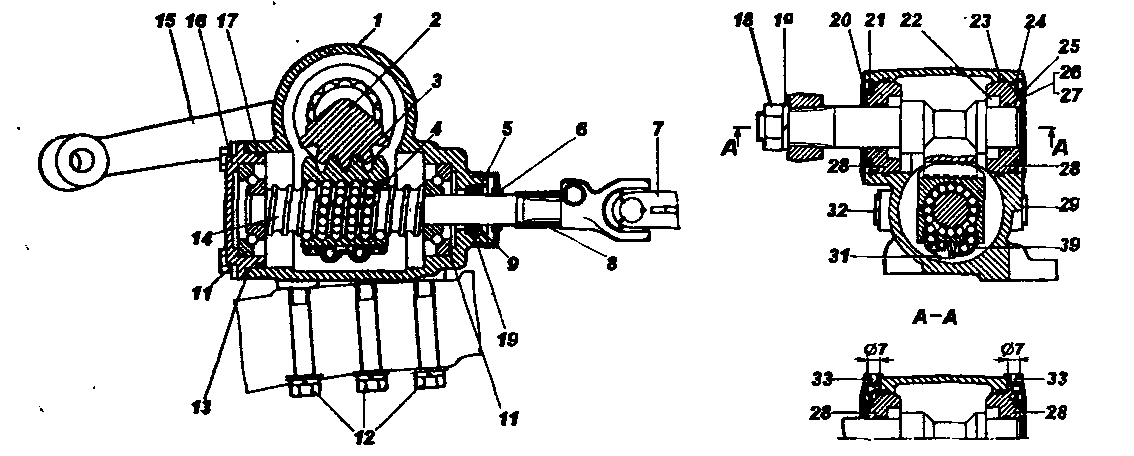
Решающую роль в долговечности деталей и узлов автомобиля играют стиль вождения, состояние дорог и своевременное обслуживание. Все это влияет и на срок службы деталей рулевого управления. Когда водитель постоянно дергает руль, крутит его на месте, прыгает по ямам и устраивает гонки по бездорожью — происходит интенсивный износ всех шарнирных соединений привода и деталей рулевого механизма. Если после «жесткой» поездки ваш автомобиль при движении стало уводить в сторону, то в лучшем случае вы обойдетесь регулировкой углов установки передних колес, ну а в худшем — затраты будут более ощутимы, так как придется заменить поврежденные детали. После замены любой из деталей рулевого привода или при уводе автомобиля от прямолинейного движения необходимо отрегулировать «сход-развал» передних колес. Работы по этим регулировкам следует проводить на стенде автосервиса с использованием специального оборудования.
Рулевой механизм, использующий червячную передачу, раньше других конструкций нашел применение в рулевом управлении автомобилей. Причиной этого явились такие положительные свойства червячной передачи, как большое передаточное число, самоторможение и относительная простота конструкции.
Причиной этого явились такие положительные свойства червячной передачи, как большое передаточное число, самоторможение и относительная простота конструкции.
Высокое передаточное число благотворно сказывается на способности рулевого механизма без применения каких-либо усилителей значительно повышать момент, приложенный руками водителя к рулевому колесу.
Самоторможение, свойственное червячным передачам, позволяет значительно уменьшить влияние толчков и ударов со стороны дороги на смещение элементов конструкции рулевого управления и удерживать рулевое колесо в исходном положении.
Однако, такая конструкция рулевого механизма не лишена и определенных недостатков, основной из которых является низкий КПД червячной передачи, отнимающей значительную долю приложенной к рулевому колесу энергии на преодоление сил трения между деталями.
Кроме того, в червячных передачах, благодаря особенности конструкции, присутствуют повышенные зазоры, которые, в совокупности с зазорами в приводе, негативно сказываются на чувствительности рулевого управления.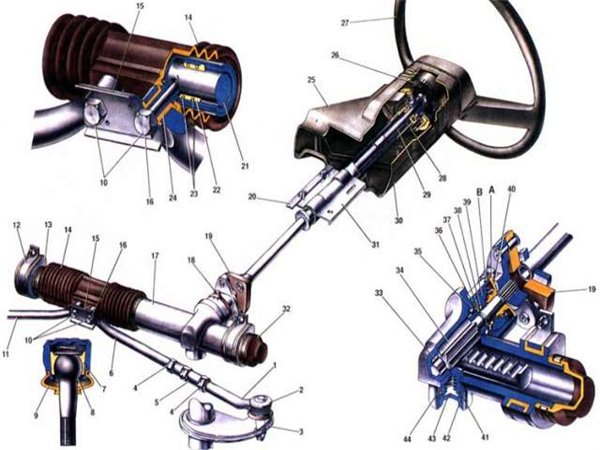
Высокое передаточное число, помогая водителю легко справиться с управлением автомобиля, с другой стороны заставляет его больше работать руками, поскольку требует значительных перемещений (вращения) рулевого колеса для обеспечения даже незначительного маневра автомобилем.
Снижения сил трения в червячной паре в значительной степени удается добиться, используя передачу типа «червяк-ролик», в которой трение скольжения подменяется трением качения. Рулевой механизм такой конструкции применяется на многих грузовых и легковых автомобилях отечественного производства, выпускаемых Горьковским, Ульяновским и Волжским автозаводами.
В настоящее время червячные рулевые механизмы утратили былую популярность, и на многих автомобилях уступили место более простым и удобным в использовании реечным механизмам, устанавливаемым в рулевом управлении современных переднеприводных легковых автомобилей и небольших грузовиков с независимой подвеской. Тем не менее, в рулевых механизмах многих грузовых автомобилей небольшой грузоподъемности, автобусов, внедорожных автомобилей, а также для заднеприводных легковых автомобилей червячные передачи пока достойной альтернативы не имеют.
Червячные рулевые механизмы, применяемые на легковых, грузовых автомобилях и автобусах, различаются формой червяка и конструкцией сопрягаемого с червяком ведомого элемента — «червяк-сектор», «червяк-кривошип» или, получивший наиболее широкое применение, — механизм «червяк-ролик».
Конструкцию червячного рулевого механизма с передачей «червяк-ролик» рассмотрим на примере его применения в рулевом управлении автомобиля ГАЗ-66-11 (рис. 1 ).
Рулевой механизм автомобиля «ГАЗ-66»
Рулевой механизм автомобиля «ГАЗ-66-11» состоит из картера 1 (рис. 1 ), внутри которого находится червяк 6 , входящий в зацепление с трехгребневым роликом 2 . Червяк запрессован на пустотелый вал 7 и установлен в картере на двух конических подшипниках 5 и 8 .
Между нижней крышкой 4 и картером рулевого управления установлено несколько тонких бумажных прокладок 3 для регулировки подшипников червяка.
Ролик установлен на оси 10 на подшипниках 11 в щечках головки вала сошки. Вал сошки вращается на двух подшипниках 17 и 18 . В месте выхода вала сошки установлена уплотнительная манжета 15 .
Вал сошки вращается на двух подшипниках 17 и 18 . В месте выхода вала сошки установлена уплотнительная манжета 15 .
На шлицованную часть вала насажена сошка 16 . Правильность установки сошки достигается наличием на ней четырех сдвоенных шлицов.
Зацепление червяка с роликом регулируют с помощью винта 12 , который ввернут в боковую крышку картера. Винт фиксируется с помощью стопорной шайбы 19 , штифта 13 и гайки 20 .
Вал червяка с помощью шпонки 9 соединен с нижней вилкой рулевого вала. Вал рулевого механизма состоит из верхнего рулевого вала и промежуточного вала, соединенных между собой и с редуктором рулевого механизма с помощью карданных шарниров.
На конце рулевого вала установлена ступица рулевого колеса.
Рулевой механизм автомобиля «Урал»
Разновидностью червячного рулевого механизма является червячно-спироидный рулевой механизм с боковым сектором, который применяется на автомобиле «Урал-4320» (рис.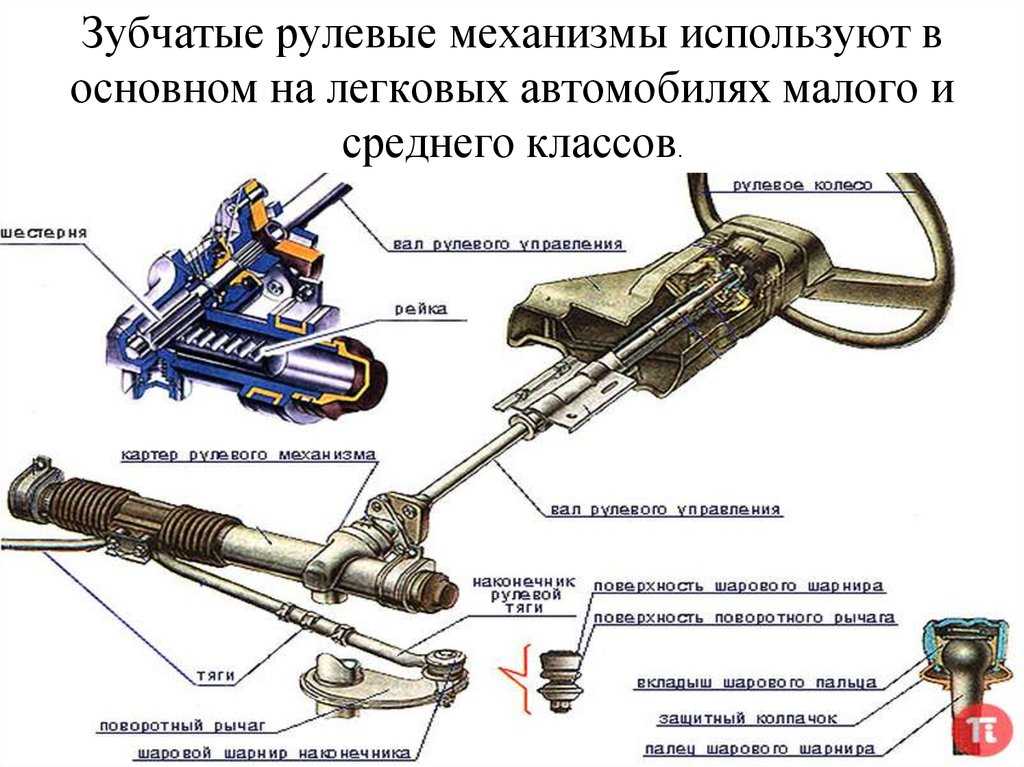 2
).
2
).
Рулевая пара состоит из двухходового цилиндрического червяка 2 и бокового сектора 3 со спиральными коническими зубьями. Червяк закреплен на валу 4 , который вращается на подшипниках 1 , допускающих небольшое осевое перемещение.
Сектор 3 выполнен заодно с валом 6 , на шлицах которого устанавливается сошка 5 .
Углы спиралей червяка конического сектора равные. При трапециевидном профиле поперечного сечения витков червяка и зубьев сектора они соприкасаются по линии, поэтому зубья воспринимают передаваемую нагрузку по всей осевой длине. Это снижает нагрузку на зубья, уменьшает контактные напряжения и повышает износостойкость передачи.
Вал сошки 6 устанавливается с большой точностью на удлиненных игольчатых подшипниках 7 .
Прогиб червяка ограничивается специальным упором 8 , установленным в картере рулевого механизма. Аналогичный упор 9 ограничивает прогиб сектора с противоположной стороны. Закрепление червяка с сектором регулируют подбором толщины бронзовой шайбы 10 , расположенной между крышкой картера и сектором.
Закрепление червяка с сектором регулируют подбором толщины бронзовой шайбы 10 , расположенной между крышкой картера и сектором.
Зазор в зацеплении увеличивается при повороте червяка в обе стороны от среднего положения с целью исключения заклинивания рулевого механизма в крайних положениях.
Червячный рулевой механизм — это один из видов рулевых механизмов, входит в состав рулевого управления. Кроме червячного механизма руля, рулевое управление состоит еще из двух элементов: 1) рулевая колонка вместе рулевой баранкой 2) рулевой привод (так называемая трапеция).
Рассмотрим вкраце элементы рулевого управления:
- 1 рулевая колонка цельная
- 2 рулевая колонка составная
Цельная рулевая колонка устанавливается на автомобили Ваз 2101, Ваз 2103, Ваз 2106, Ваз 2108. Цельная означает, что колонка состоит из однового рулевого вала.
Составная рулевая колонка устанавливается на автомобили Ваз 21213 (нива), Ваз 2105. Вал такой рулевой колонки состоит из промежуточных валов.
Вал такой рулевой колонки состоит из промежуточных валов.
червячный рулевой механизм
В рулевую колонку встраивают элементы, пассивно отвечающие за безопасность. Эти элементы деформируются при дтп, на некоторых автомобилях рулевые колонки складываются при авариях, чтобы уменьшить травмоопасность.
Устройство червячного рулевого механизма
Где находится червячный мехнизм в рулевой передаче? Рулевой червяк в механизме находится там, куда входит рулевая колонка.
Червячный рулевой механизм связывается в паре с червяком, а не с зубчатым зацеплением шестерней. Червяк зацепляется с роликом, а ролик соединяется с сошкой рулевого управления. При передачи вращения от рулевого колеса, рулевой колонке, который вращает червяк, толкающий ролик, тем самым управляя сошкой влево или вправо. Сошка рулевого управления толкает поперечную тягу, а она, в свою очередь, передает движение боковым рулевым тягам, которые поворачивают поворотные цапфы, на которых сидят колеса.
На рисунке представлен чертеж червячного рулевого механизма
схема рулевого механизма червячного: 1-картер рулевого механизма, 2-червяк, 3-роликовое колесико, 4-сошка рулевого управления, 5-гайка винта, который регулирует зацепление {червяк-ролик}, 6-пробка для заливки масла в картер рулевого механизма.
В теперешние времена, на многие автомобили устанавливают усилители руля. Усилители подразделяются на: электрический усилитель руля (ЭУР), гидавлический усилитель руля (ГУР). В советские времена усилители на рулевые механизмы устанавливали только на грузовые автомобили, чтобы облегчить поворот руля водителю. Иметь гидро-, или элеткроусилители конечно хорошо, но все же есть свои минусы. Зимой, в гололедицу при повороте руля не чувствуется как стоят колеса на скользкой поверхности из-за легкости вращения рулем. Также, если усилители руля откажут, ездить на такой машине не рекомендуется, нужно срочно отремонтировать.
Рулевое управление автомобиля — назначение и устройство
Главная / Учебник по устройству автомобиля / Глава 8. Рулевое управление » Подраздел 8.1 Назначение и устройство рулевого управления
Рулевое управление предназначено для изменения направления движения автомобиля. Обычно управляемыми являются колеса передней оси, но это преимущественно на легковых автомобилях. Иногда для улучшения управляемости автомобиля и сохранения над ним полного контроля его делают полноуправляемым, то есть управляемыми являются не только основные передние колеса – задние также имеют возможность отклоняться на определенный угол.
Иногда для улучшения управляемости автомобиля и сохранения над ним полного контроля его делают полноуправляемым, то есть управляемыми являются не только основные передние колеса – задние также имеют возможность отклоняться на определенный угол.
Рулевое управление может быть с усилителем или без него, может устанавливаться на поперечине кузова в моторном отсеке или на подрамнике (практически на всех современных автомобилях).
Устройство рулевого управления
Рисунок 8.1 Пример рулевого механизма.
1 – рулевое колесо; 2 – гайка крепления рулевого колеса; 3 – верхний кожух рулевой колонки; 4 – шестерня рулевого редуктора; 5 – фланец рулевого вала; 6 – рулевой вал; 7 – труба рулевого вала; 8 – нижний кожух рулевой колонки; 9 – шаровой шарнир; 10 – наконечник рулевой тяги; 11 – пыльник; 12 – рейка рулевого редуктора; 13 – болт крепления рулевой тяги; 14 – стопорная пластина; 15 – рулевая тяга; 16 – поворотный рычаг передней стойки.
Рулевое колесо и рулевая колонка
Садясь в автомобиль на место водителя, первое, что вы видите, — это рулевое колесо.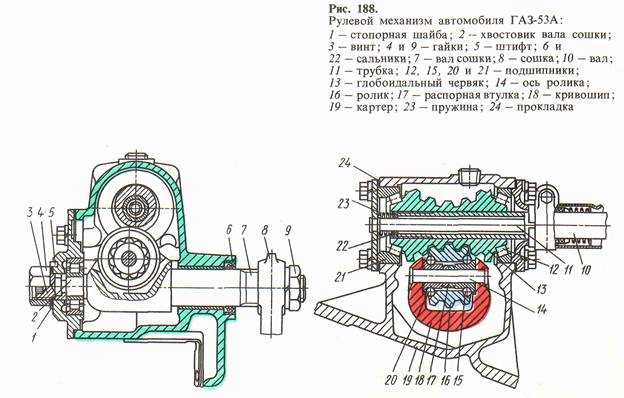 Вращая его в ту или иную сторону, вы направляете автомобиль. Ничего в рулевом колесе (или руле) сложного нет… если это, конечно, руль автомобиля самой простой комплектации. В современных автомобилях руль — это и место для установки подушки безопасности, и пульт управления аудиосистемой вместе с телефоном, также это контроллер для управления бортовым компьютером. Рулевое колесо современного автомобиля иногда бывает попросту перегружено всяческими переключателями и кнопками, которые имеют различное назначение.
Вращая его в ту или иную сторону, вы направляете автомобиль. Ничего в рулевом колесе (или руле) сложного нет… если это, конечно, руль автомобиля самой простой комплектации. В современных автомобилях руль — это и место для установки подушки безопасности, и пульт управления аудиосистемой вместе с телефоном, также это контроллер для управления бортовым компьютером. Рулевое колесо современного автомобиля иногда бывает попросту перегружено всяческими переключателями и кнопками, которые имеют различное назначение.
Рулевая колонка, это, по сути, два вала (реже один), соединенных между собой универсальными шарнирами (похожими на карданные). Она призвана передавать вращение от рулевого колеса к рулевому механизму. На многих нынешних автомобилях предусмотрена регулировка угла наклона рулевого колеса и расстояния его вылета. Другими словами, вы можете, перемещая рулевое колесо вверх/вниз и на себя/от себя, установить то положение, которое наиболее близко к идеальному, согласно вашим пожеланиям.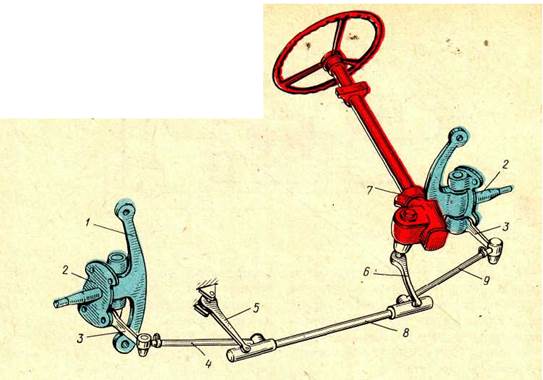
Примечание
Для обеспечения высоких показателей пассивной безопасности, к проектированию рулевой колонки относятся так же серьезно, как и, например, к проектированию сиденья. Это связано с тем, что при фронтальном столкновении рулевое колесо не должно смещаться более, чем это допустимо. Поэтому при столкновении рулевая колонка должна складываться или ломаться в определенных местах.
Рулевой механизм
На современных легковых автомобилях применяются два самых распространенных типа рулевых механизмов: червячный и реечный.
Интересно
Огромное значение имеет место расположения на подрамнике рулевого механизма относительно воображаемой оси управляемых колес. Так, установка рулевого механизма за передней осью или перед ней в итоге может кардинально изменить поведение автомобиля на дороге, поэтому конструкторы при проектировании автомобиля подходят к этому вопросу очень серьезно.
Червячный рулевой механизм
Если рулевой механизм червячный, то он состоит из глобоидного червяка и углового сектора, на который установлен ролик. К угловому сектору подсоединен вал, а на валу закреплена сошка. Перемещение сошки передается на рулевую трапецию, которая состоит из рулевых тяг. Тяги, перемещаясь, поворачивают колеса в ту или иную сторону. Устройство рулевого механизма показано на рисунке 8.2. Сейчас автомобили с червячным рулевым механизмом встречаются все реже.
К угловому сектору подсоединен вал, а на валу закреплена сошка. Перемещение сошки передается на рулевую трапецию, которая состоит из рулевых тяг. Тяги, перемещаясь, поворачивают колеса в ту или иную сторону. Устройство рулевого механизма показано на рисунке 8.2. Сейчас автомобили с червячным рулевым механизмом встречаются все реже.
Рисунок 8.2 Червячный рулевой механизм.
Червячная передача – это такой тип передачи, в которой имеется червяк, представляющий собой резьбовую часть болта, но только с увеличенными во много раз витками, и шестерня, входящая в зацепление с этим червяком.
Глобоидным червяк называется из-за своей формы: его профиль вогнутый, как показано на рисунке 8.3.
Рисунок 8.3 Внешний вид глобоидного червяка.
Реечный рулевой механизм
Теперь опишем реечный рулевой механизм (рисунок 8.4). Он состоит из шестерни и зубчатой рейки. Шестерня соединена с валом рулевой колонки, а рейка через тяги – с поворотными кулаками колес.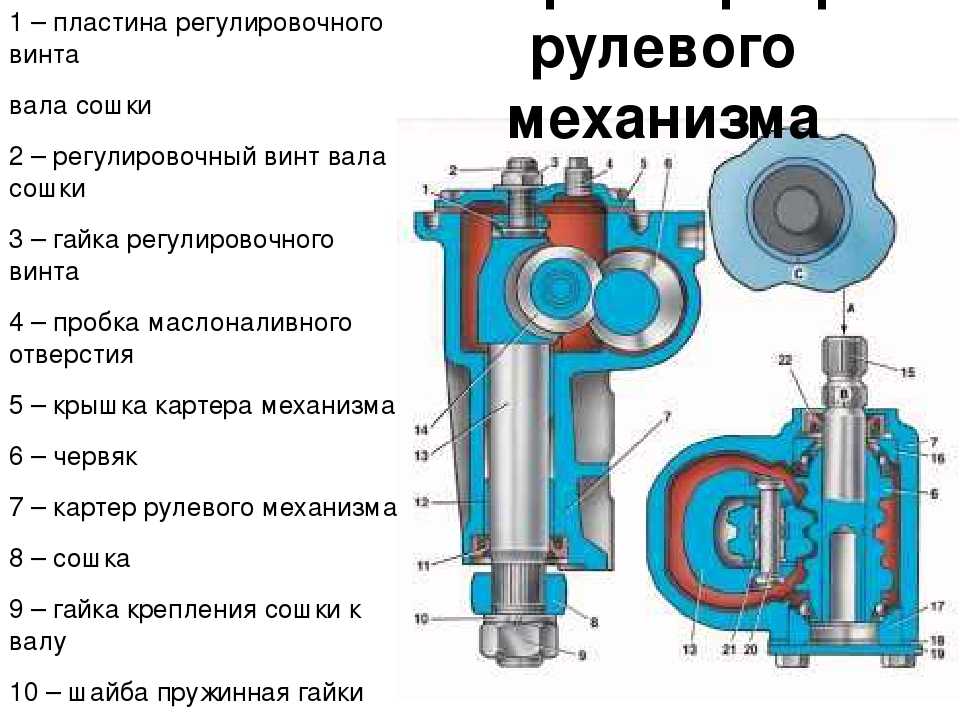
Рисунок 8.4 Реечный рулевой механизм.
Интересно
Иногда зубья на рейке наносят с переменным шагом (рисунок 8.5). Делают это для того, чтобы получить подобие активного рулевого управления для получения сочетания таких противоречивых показателей, как управляемость и комфорт. Так, для того чтобы при парковке водитель не вращал рулевое колесо на 5—10 оборотов в угоду легкости, желательно, чтобы число оборотов от упора до упора составляло как можно меньше – один, а то и пол-оборота. Но если от правого крайнего положения руля до левого будет всего один оборот, то рулевое управление будет довольно чувствительным к каждому движению, что опасно при движении на высоких скоростях, так как плавно выполнить все маневры не удастся, а это чревато последствиями. Вот и пришли к такому довольно простому компромиссному решению: шаг центральных зубьев рулевой рейки небольшой, а передаточное отношение чуть выше, а, следовательно, и чувствительность к отклонению рулевого колеса небольшая. Но от центра шаг зубьев увеличивается, чтобы уменьшить передаточное отношение и общее число оборотов рулевого колеса.
Но от центра шаг зубьев увеличивается, чтобы уменьшить передаточное отношение и общее число оборотов рулевого колеса.
Рисунок 8.5 Пример зубчатой рейки рулевого механизма с переменным шагом зубьев.
Примечание
Шаг зубьев – это расстояние между центрами вершин зубьев.
Интересно
Кстати, может быть и обратная ситуация, когда шаг зубьев рейки уменьшается ближе к концам рейки.
Реечный рулевой механизм занял место червячного и основательно закрепился как наиболее актуальная конструкция, так как его преимущества говорят сами за себя: управление автомобилем, даже не оборудованным усилителем рулевого управления, несложное, небольшое количество звеньев всего рулевого механизма, простота монтажа на автомобиль и сведение к минимуму операций по обслуживанию.
Рулевой привод
Рулевой привод — это набор тяг и шарниров, связывающих и передающих перемещения от рулевого механизма к поворотным кулакам управляемых колес.
Если вернуться к червячному рулевому механизму, то в классической схеме имеются три тяги — одна центральная и две боковые, они соединяются через шарниры. Тяги рулевого привода в данном случае называют рулевой трапецией. Конструкция рулевой трапеции в геометрическом плане такова, что она обеспечивает поворот управляемых колес на разные углы (смотрите главу «Ходовая часть»).
Тяги рулевого привода в данном случае называют рулевой трапецией. Конструкция рулевой трапеции в геометрическом плане такова, что она обеспечивает поворот управляемых колес на разные углы (смотрите главу «Ходовая часть»).
При условии установки реечного рулевого механизма все немного проще. К рулевой рейке крепятся рулевые тяги с обеих сторон, которые передают перемещение на поворотные кулаки колес. Преимущества очевидны, ведь чем меньше различных промежуточных звеньев, тем надежнее и точнее весь механизм.
Примечание
Чтобы исключить попадание грязи и пыли в корпус реечного рулевого механизма, с обеих его сторон установлены так называемые пыльники (гофрированные резиновые чехлы).
Углы поворота управляемых колес
При повороте управляемые колеса автомобиля проходят различные расстояния. И если оба колеса будут поворачиваться на одинаковый угол, автомобиль будет смещаться с заданной траектории, при этом шины колес будут значительно быстрее изнашиваться.
Рисунок 8.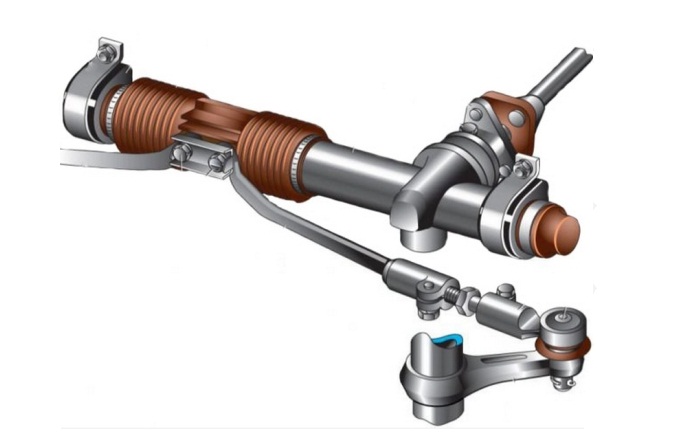 6 Поворот управляемых колес на разные углы.
6 Поворот управляемых колес на разные углы.
Для того чтобы избежать этого, рулевое управление проектируют таким образом, чтобы обеспечить поворот внутреннего колеса на больший угол относительно наружного.
Рисунок 8.7 Поворот управляемых колес на различные углы.
Глава 8. Рулевое управление | Аэродинамика автомобиля Общие сведения о электрооборудовании автомобиля | Подраздел 8.2 Назначение и типы усилителей рулевого управления |
Please enable JavaScript to view the comments powered by Disqus. comments powered by Disqus
Автопилот с роторным приводом для рулевого управления с червячной передачей
Автопилоты — это часть электронного оборудования, которое действительно может предложить каждому моряку — от ганхолера до круизного лайнера. Наличие этого дополнительного члена экипажа на борту не только облегчает бремя неполного плавания, но и помогает предотвратить усталость руля.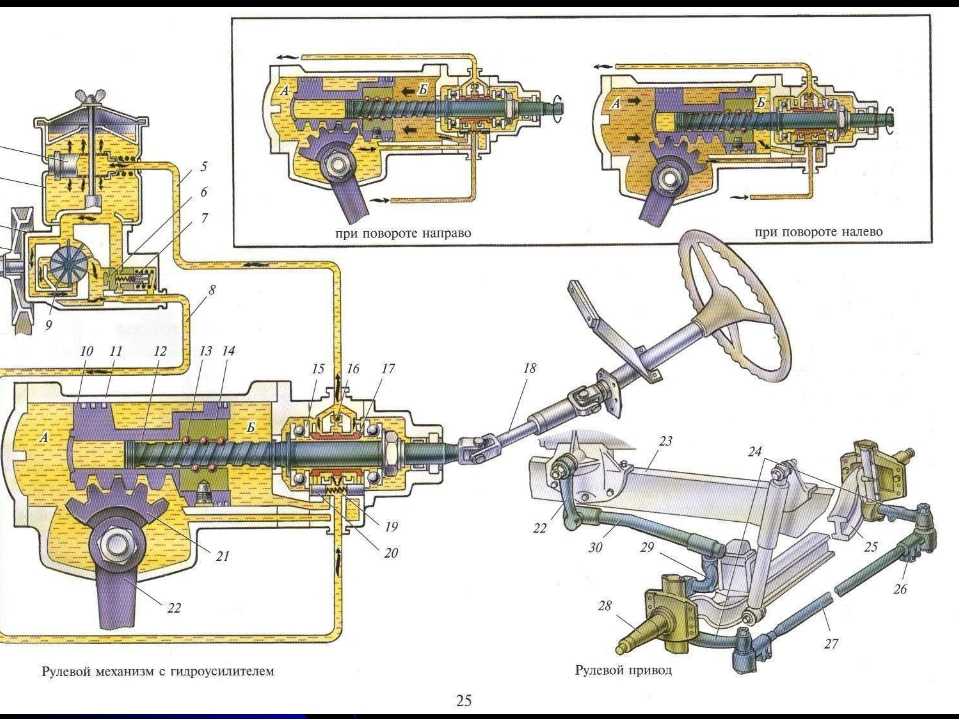 Автопилот позволяет морякам-одиночкам использовать голову, легче поднимать паруса или перекусывать. Члены экипажа могут наслаждаться путешествием, проводя время за чтением книги или наблюдая за пейзажем, не будучи рабом штурвала.
Автопилот позволяет морякам-одиночкам использовать голову, легче поднимать паруса или перекусывать. Члены экипажа могут наслаждаться путешествием, проводя время за чтением книги или наблюдая за пейзажем, не будучи рабом штурвала.
В то время как вся морская электроника постоянно развивается, основных инноваций для автопилотов, как правило, меньше, чем, скажем, УКВ-радиостанций или картплоттеров. В декабре 2013 года у нас была возможность установить и оценить недавнее предложение от Raymarine, которое может похвастаться некоторыми важными инновациями, — системой автопилота Evolution EV-1. Мы установили EV-1 на борту нашего испытательного катера, Union 36 1978 года выпуска, и в этом году он станет предметом длительных испытаний, поскольку испытатели будут курсировать по атлантическому побережью и Багамам. Поскольку долговечность является важным фактором при оценке автопилота, до сих пор нет единого мнения относительно долговечности службы; тем не менее, мы можем предоставить наши наблюдения относительно установки и первоначальной эксплуатации на данный момент.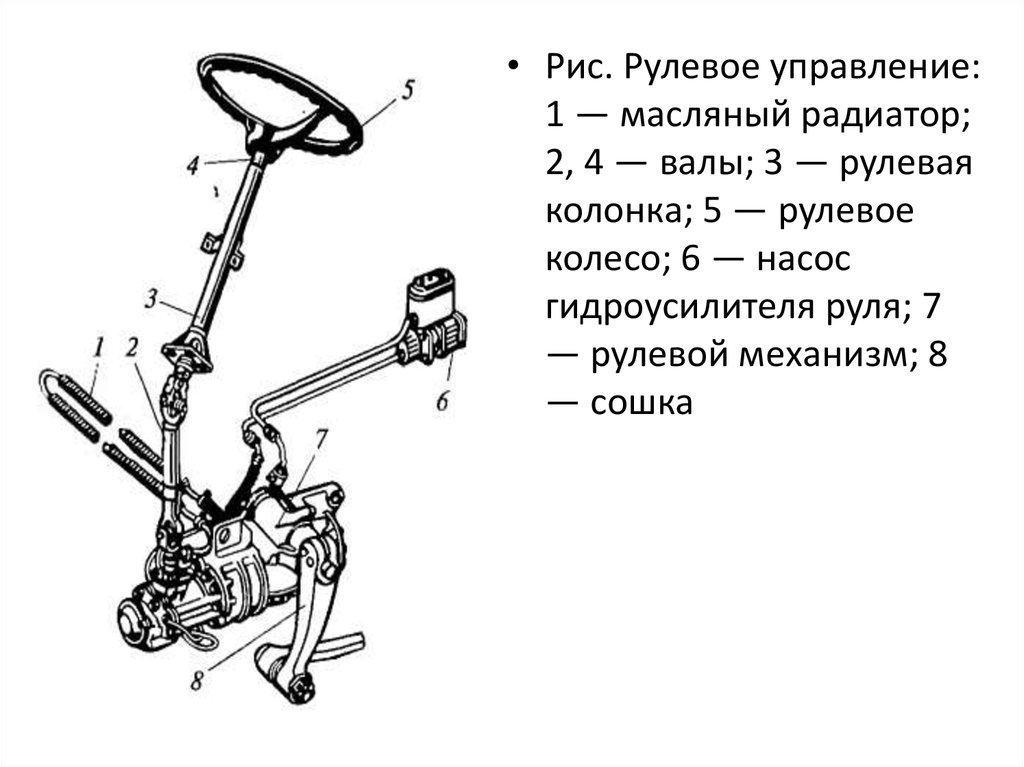
Автопилоты состоят из трех основных компонентов: курсового компьютера или процессора, приводного механизма и контрольной панели/дисплея кабины. Другие компоненты (в зависимости от системы) могут включать в себя феррозондовый компас, а также датчик обратной связи руля направления или опорный индикатор.
Блок дисплея обычно располагается на штурвале и обеспечивает интерфейс между пользователем и автопилотом. Курсовой компьютер — это мозг автопилота. Он обрабатывает все навигационные данные, а также связывается с другими частями системы и направляет их. Обычно это автономный блок, устанавливаемый в каком-нибудь сухом, безопасном месте под палубой, хотя в некоторых случаях он также может находиться в блоке дисплея.
Привод преобразует электрические данные процессора в механическое движение, необходимое для управления рулем лодки. Компас с феррозондовым датчиком отслеживает и передает курсовому компьютеру информацию о курсе судна, в то время как индикатор отсчета руля (если требуется) передает данные о положении руля обратно на курсовой компьютер.
Хотя при выборе автопилота необходимо учитывать ряд факторов (тип лодки, водоизмещение и т. д.), самой большой разницей между различными устройствами будет привод. Автопилоты можно условно разделить на надпалубные и подпалубные блоки, причем последние далее делятся на линейные, гидравлические и поворотные приводы. Надпалубные агрегаты, или приводы кабины, также можно разделить на две группы: рулевые и румпельные. Колесные автопилоты старого типа состоят из двигателя, установленного в кабине, который использует ремень (похожий на ремень автомобильного вентилятора) для привода ступицы, установленной на колесе. Более новые колесные блоки имеют встроенные пилоты с закрытым приводом. Они работают почти так же, но вместо открытого ремня двигатель и звездочка объединены в единое целое, что упрощает установку и делает ее менее загроможденной.
В устройствах румпеля используется линейный рычаг или домкрат, один конец которого прикреплен к кабине, а другой конец прикреплен горизонтально к румпелю. Колесные автопилоты имеют ручную муфту, которая позволяет включать и выключать привод, в то время как румпельные блоки отключаются простым снятием рычага со штифта крепления румпеля.
Колесные автопилоты имеют ручную муфту, которая позволяет включать и выключать привод, в то время как румпельные блоки отключаются простым снятием рычага со штифта крепления румпеля.
Рулевые и румпельные блоки лучше всего подходят для небольших лодок, плавающих вблизи берега. Владельцам лодок длиннее 36 футов или тем, кто стремится к открытому морю, следует искать автопилот под палубой. Пилоты коммерческого класса, изготовленные WH Autopilots на острове Бейнбридж, штат Вашингтон, получают высокие оценки читателей.
Тип вашей рулевой системы будет определять, какой привод вам потребуется для сопряжения с автопилотом. Все производители автопилотов предоставляют рекомендации по выбору привода, соответствующего вашей системе рулевого управления. Вторым решающим фактором является водоизмещение лодки, от которого зависит мощность или размер привода.
Линейные приводы – лучший выбор для лодок с тросовым и квадрантным рулевым управлением. В них используется таран, прикрепленный непосредственно к рулевому квадранту или (в некоторых случаях) к рулевой стойке. Лодки с гидравлическим рулевым управлением логично выбрать гидравлический привод, в котором для управления рулем используется насос, вставленный в существующий рулевой шланг. Гидравлические насосы можно разделить на два основных типа: реверсивные и насосы постоянного действия.
Лодки с гидравлическим рулевым управлением логично выбрать гидравлический привод, в котором для управления рулем используется насос, вставленный в существующий рулевой шланг. Гидравлические насосы можно разделить на два основных типа: реверсивные и насосы постоянного действия.
Реверсивные насосы (наиболее распространенные) работают только тогда, когда это необходимо для перемещения руля, работая в одном направлении на правый борт, затем в обратном направлении на левый. Насосы с постоянной работой, как следует из названия, работают непрерывно, пока включен автопилот. Они используют электрический соленоид для управления потоком гидравлической жидкости к рулевому цилиндру, который приводит в движение руль направления влево или вправо.
Наш испытательный катер Union оснащен червячным рулевым механизмом, прочным, но все более редким типом и одной из самых сложных систем для связи с автопилотом. Мы выбрали поворотный блок (также называемый цепным приводом) как наиболее практичный выбор. Одним из преимуществ червячной передачи является то, что вращающийся вал, к которому прикрепляется ведущая звездочка автопилота, имеет значительное механическое преимущество, поэтому нагрузки, передаваемые через звездочку и привод, ниже, чем те, которые характерны для других систем рулевого управления. (Обратной стороной этого является отсутствие обратной связи с рулем направления.) Это позволило нам прикрепить ведущую звездочку к рулевому валу тремя установочными винтами, глубоко ввернутыми в вал, а не рекомендуемым шпоночным пазом. В целом, цепные поворотные приводы непопулярны, потому что короткое возвратно-поступательное движение и короткое плечо рычага подвергают оборудование значительному износу.
Одним из преимуществ червячной передачи является то, что вращающийся вал, к которому прикрепляется ведущая звездочка автопилота, имеет значительное механическое преимущество, поэтому нагрузки, передаваемые через звездочку и привод, ниже, чем те, которые характерны для других систем рулевого управления. (Обратной стороной этого является отсутствие обратной связи с рулем направления.) Это позволило нам прикрепить ведущую звездочку к рулевому валу тремя установочными винтами, глубоко ввернутыми в вал, а не рекомендуемым шпоночным пазом. В целом, цепные поворотные приводы непопулярны, потому что короткое возвратно-поступательное движение и короткое плечо рычага подвергают оборудование значительному износу.
Как линейные, так и вращательные приводы используют электромеханическую муфту (управляемую пилотом) для включения привода во время работы. Они отключаются, когда автопилот выключается или находится в режиме ожидания, создавая очень небольшое сопротивление или сопротивление системы рулевого управления, если она установлена правильно.
Фотографии Франка Ланье
Установленная нами система автопилота Evolution EV-1 включала ACU-200 (блок управления приводом) и контроллер пилота p70. Максимальная непрерывная мощность ACU-200 составляет 15 ампер. Более крупный вращающийся привод ACU-400 имеет максимальную непрерывную выходную мощность 30 ампер. Это максимальная мощность, когда привод работает только периодически. Создатели автопилота рассчитывают, что пилот будет работать 25 процентов времени, но энергопотребление будет сильно различаться в зависимости от условий. В идеале штурвал должен быть хорошо сбалансирован, так что для управления требуется очень мало энергии. Мы недостаточно использовали пилотную версию, чтобы получить четкое представление о средней потребляемой мощности, но мы ожидаем, что ток в нашей 12-вольтовой системе будет в среднем между 2,5 и 6 амперами.
Поскольку предыдущая система также была произведена Raymarine (Smartpilot X-30), испытатели смогли использовать существующий поворотный привод и магистральные кабели SeaTalk NG. Сеть SeaTalk NG позволила испытателям использовать одно кабельное соединение для питания и передачи данных от Evolution ACU к другим компонентам системы.
Сеть SeaTalk NG позволила испытателям использовать одно кабельное соединение для питания и передачи данных от Evolution ACU к другим компонентам системы.
С точки зрения установки наиболее заметным физическим отличием Smartpilot X-30 от EV-1 является отсутствие феррозондового компаса, который в новой системе EV-1 заменен сенсорным сердечником. Сердцем системы EV-1, сенсорным ядром является девятиосевой датчик (фактически, курсовой компьютер для всей системы), который вычисляет курс, тангаж, крен и рыскание лодки. Raymarine описывает сердцевину сенсора как полностью водонепроницаемую. Его можно установить практически в любом месте — заподлицо, на переборке, слева или справа от осевой линии, над или под палубой, даже в перевернутом виде. Основные требования заключаются в том, чтобы устройство было установлено ровно, лицом вперед и вдали от источников тепла и магнитных помех.
Основным преимуществом системы EV-1 является то, что в отличие от X-30 (и других систем автопилота в целом) ее не нужно калибровать.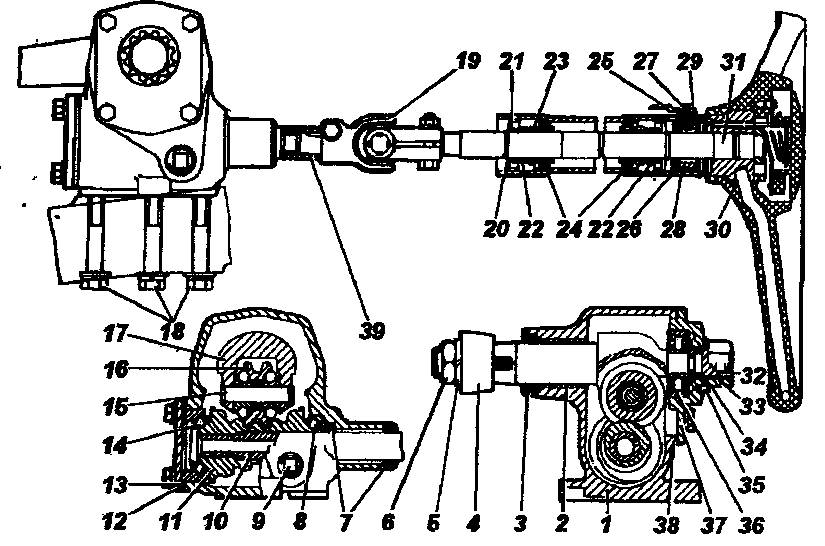 Вы просто вводите базовый стиль информационного судна, тип привода, время перекладки руля и т. д. Это избавляет от необходимости трогаться с места и делать большие медленные круги, пока автопилот калибрует себя.
Вы просто вводите базовый стиль информационного судна, тип привода, время перекладки руля и т. д. Это избавляет от необходимости трогаться с места и делать большие медленные круги, пока автопилот калибрует себя.
Алгоритмы управления, используемые ядром датчика EV, позволяют автопилоту автоматически развиваться и адаптироваться как к морским условиям, так и к характеристикам управления судном без каких-либо пользовательских настроек. Пользователи также могут модифицировать систему с помощью трех выбираемых пользователем режимов производительности (отдых, круиз и производительность). Круизный режим сочетает в себе экономичность и производительность, в то время как режим производительности обеспечивает максимально точное управление курсом (но при этом создает наибольшую нагрузку на вождение).
После установки EV-1 мы использовали его ежедневно во время двухнедельного путешествия по Атлантическому прибрежному водному пути (ICW) и при пересечении Гольфстрима из Форт-Лодердейла, штат Флорида, в Вест-Энд, Багамы.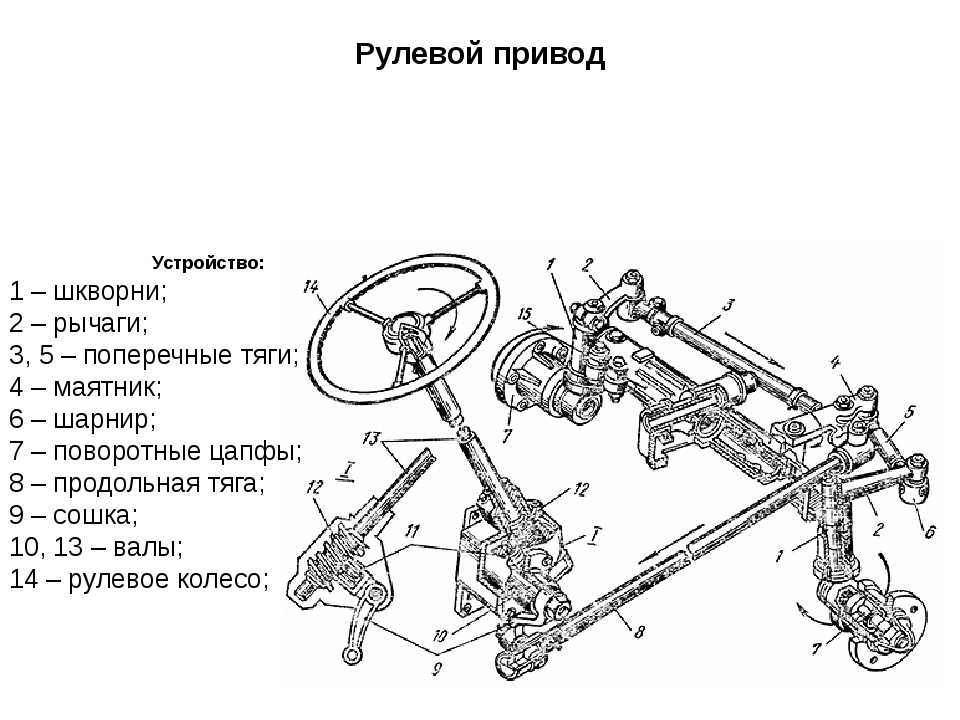 Затем мы использовали его еще пять дней во время круиза по Абакосу, прежде чем пришвартовать нашу испытательную лодку в Марш-Харбор на острове Грейт-Абако. Во время поездки мы использовали EV-1 как под мотором, так и под парусом, создавая и следуя маршрутам, а также сбрасывая и используя путевые точки на лету.
Затем мы использовали его еще пять дней во время круиза по Абакосу, прежде чем пришвартовать нашу испытательную лодку в Марш-Харбор на острове Грейт-Абако. Во время поездки мы использовали EV-1 как под мотором, так и под парусом, создавая и следуя маршрутам, а также сбрасывая и используя путевые точки на лету.
Во время путешествия по ICW мы максимально использовали автопилот, как при переходе через большие водоемы, так и при движении по прямым участкам водного пути. Использование вдоль ICW осуществлялось путем установки курса, затем включения автопилота и корректировки курса по мере необходимости с помощью кнопок изменения курса на один или 10 градусов. В дополнение к вождению по канаве наше путешествие по ICW было перемежено парой выездов на природу, что позволило нам ориентироваться, вводя путевые точки и прокладывая маршруты с помощью нашего многофункционального дисплея Raymarine e7. Мы также использовали этот метод во время круиза на Багамы.
Мы столкнулись с волнами от спокойного до умеренного на внешних участках пути, направляясь на юг, однако Гольфстрим устроил тренировку для EV-1, когда во время нашего перехода уровень моря был от 4 до 6 футов.
Испытатели опробовали каждый из трех выбираемых пользователем режимов (отдых, круиз и производительность) в ICW и открытом океане. Режим отдыха был более свободным, чем мы хотели, поэтому мы решили придерживаться режима круиза и производительности. Мы увидели небольшую разницу в том, насколько усердно пилот работал в режиме производительности по сравнению с крейсерским режимом, поэтому через несколько дней мы начали использовать только режим производительности.
Во время наших текущих проверок после первой установки системы, мы заметили небольшое отклонение от левого борта к правому, предположительно в результате того, что устройство изучило особенности системы рулевого управления наших испытательных судов. Это блуждание постепенно уменьшилось до приемлемого уровня до конца нашего путешествия.
Установка хорошо зарекомендовала себя как на ровных водах ICW, так и на более бурных морях, с которыми мы столкнулись во время нашего перехода к Багамам.
Работа привода была плавной и тихой, без заметных рывков или визгов при управлении рулем или при выполнении более крутых, чем обычно, поворотов. Уровни шума приводов были от умеренных до низких, без каких-либо признаков (звуковых или иных) чрезмерной нагрузки привода, даже во время движения по лучу к морю в Гольфстриме. Пилотный контроллер p70 был прост в эксплуатации и легко читался при любых условиях освещения (от полной темноты до яркого солнечного света).
Уровни шума приводов были от умеренных до низких, без каких-либо признаков (звуковых или иных) чрезмерной нагрузки привода, даже во время движения по лучу к морю в Гольфстриме. Пилотный контроллер p70 был прост в эксплуатации и легко читался при любых условиях освещения (от полной темноты до яркого солнечного света).
До сих пор наш первоначальный опыт работы с системой EV-1 был положительным, хотя долгосрочные испытания и использование скажут вам правду. Мы более подробно рассмотрим энергопотребление и ключевые функции в обновлении, которое выйдет позже в этом году.
Нет никаких аргументов в пользу того, что автопилот на борту может улучшить судьбу любого моряка. При этом то, что автопилот не приносит на стол, так это навыки морского дела и способности принимать решения капитана судна.
В лучшем случае автопилот следует рассматривать как способного, но слепого члена экипажа, который доставит вас туда, куда вы хотите, независимо от последствий. Он не сможет увернуться от морского буя, который вы подключили в качестве путевой точки, и не будет возражать против того, чтобы пройти через песчаную отмель, если вы проложили такой курс.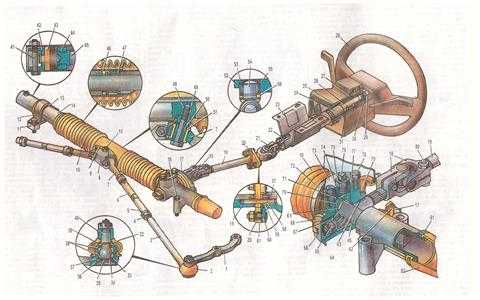
Инструменты и методы рулевого управления привода червяки
Советы по установке автопилота
- При выборе пилотов, ошибки на стороне сохранения
Контакт
- Raymarine
NOS-шестерня для коробки передач и Worm Gear Gear 42 «5.52
nos getering gear box и worm gear gear 42″ 50-52. M38
НА ЭТОЙ НЕДЕЛЕ! Введите код NEWSITE10 при оформлении заказа, чтобы сэкономить 10% на всем сайте. За исключением кузовов, комплектов ванн и шин.
БЕСПЛАТНАЯ ДОСТАВКА при онлайн-заказах на сумму более 98,00 долларов США. Подробнее
Выберите валюту
Закрыть
- Африка
- Америка
- Азия
- Европа
- Океания
Видео о продуктах
 youtube.com/embed/NsILb3-O4AY» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/NsILb3-O4AY» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/> Вопросы и ответы
Пожалуйста, подождите…
Задавать вопрос Добавить ответ
Имя *
Электронная почта *
Вопрос *
Все вопросы будут отображаться после модерации. Все ответы будут отображаться после модерации.
Ищу такой для своего 55 универсала. это 44 1/8 дюйма в длину. Спасибо.
Willys Jeep Parts Tech:
Только б/у. Чтобы помочь, напишите по адресу [email protected].
У меня есть Willy’s M38 1952 года выпуска. Рулевой вал и червячная передача в аварийном состоянии, т.е. погнутая, червячная передача длиннее, чем mb и т.
 д. Я полагаю, что секторный вал имеет размер 15/16″, а не 7/8″, можете ли вы поставить правильный 42-дюймовый, пожалуйста, сообщите, с уважением, Терри
д. Я полагаю, что секторный вал имеет размер 15/16″, а не 7/8″, можете ли вы поставить правильный 42-дюймовый, пожалуйста, сообщите, с уважением, Терри Willys Jeep Parts Tech:
Если у вас M38, то это будет 804388.
У меня есть червяк с штампом TA123001. Этот подойдет?
Willys Jeep Parts Тех. Спасибо!
Ваша червячная передача M38 42 произведена в США и/или в Новой Зеландии?
Willys Tech:
В настоящее время мы поставляем оригиналы NOS.
Майк, Какую смазку лучше всего использовать в редукторе вокруг червячной передачи и подшипников? Слышали все, от смазки мостов до масла вязкостью 140? Спасибо, Марк
Willys Jeep Parts Tech:
Обычно мы используем трансмиссионное масло с вязкостью 90. Я видел, как люди используют смазку для поворотных кулаков, смазку для мостов для тяжелых условий эксплуатации и т. Д.
Майк, пытаясь найти подходящую трубу рулевого механизма и червячную передачу для моего m38a1 1963 года, у меня есть секторный вал 5/16, и я знаю, что у меня есть червячная передача 42 дюйма в длину, однако, как мы уже обсуждали, я думаю, что это отличается от того, с чем пришел этот джип, на валу, который у меня есть, есть номер, если это поможет, спасибо, Майк Г.

Willys Tech:
Звоните нам по бесплатному телефону. Я могу попросить вас сделать некоторые замеры на вашем старом секторном валу, и мы вместе разберемся.
Можно ли заменить трубу рулевого механизма без замены червячной передачи? Червячная передача выглядит нормально, трубка, похоже, сломана.
Willys Tech:
Все они представляют собой единое целое, поэтому их необходимо заменять как единое целое.
Ребята, вы продаете переключатель звукового сигнала и адаптер (1952 M38), который крепится к нижней части рулевого механизма?
Willys Tech:
852641 — это номер детали, который вам нужен для M38.
У меня есть Jeepster 1950 года, какой рулевой редуктор и трубу я бы использовал?
Willys Tech:
Мы можем найти для вас трубчатые и червячные шестерни Willys Jeepster. Пожалуйста, позвоните нам по бесплатному номеру.
У меня пикап 51 willys. Какую трубку и червячную передачу рулевого механизма я бы использовал для замены своей? Мой предыдущий владелец разрезал на две части плазменным резаком.
