
Кинематические и силовые характеристики планетарного редуктора
Машиностроение \ Теория механизмов и машин
Страницы работы
12 страниц (Word-файл)
Посмотреть все страницы
Скачать файл
Содержание работы
11. КИНЕМАТИЧЕСКИЕ И СИЛОВЫЕ
ХАРАКТЕРИСТИКИ
ПЛАНЕТАРНого РЕДУКТОРа
(лабораторная работа № 11)
Цель работы: изучить кинематическую схему и конструкцию планетарного редуктора, определить его кинематические параметры и КПД при различных режимах работы.
Краткие теоретические сведения
Механизмы зубчатых передач с подвижными осями
В трехзвенном зубчатом механизме (рис. 11.1)
зубчатое колесо 1 неподвижно, зубчатое колесо 2 имеет подвижную ось О2. Звено Н входит во вращательные пары
Звено Н входит во вращательные пары
. (11.1)
Следовательно, передаточное отношение
. (11.2)
Из этих равенств видно, что — есть передаточное отношение при неподвижном колесе 1, а — передаточное отношение трехзвенного зубчатого механизма с колесами, имеющими неподвижные оси, т.е. при неподвижном водиле Н. В дальнейшем, чтобы знать, у какого неподвижного звена определять то или иное передаточное отношение, будем в скобках ставить индекс того звена которое неподвижно:
. (11.3)
(11.3)
Простейший планетарный редуктор, состоящий из четырех звеньев, можно получить из планетарного механизма, если в него ввести еще одно зубчатое колесо 3 с осью О3, входящее в зацепление с сателлитом 2 (рис. 11.2).
Передаточное отношение от вала О3 к валу ОН определяют по формуле
. (11.4)
Рис. 11.1. Планетарный трехзвенный зубчатый механизм
Рис. 11.2. Схема планетарного редуктора Джемса
Передаточное отношение
тогда
.
Если ввести в это уравнение радиусы начальных окружностей или числа зубьев , то формула примет вид
(11. 5)
5)
или
(11.6)
Передаточное отношение от водила Н к колесу 3 редуктора находят из выражения
(11.7)
или
. (11.8)
По-прежнему
, (11.9)
отсюда
. (11.10)
Рассмотренный нами планетарный редуктор называется редуктором Джемса (рис. 11.2). Планетарный редуктор такого типа можно составить также из круглых конических колес (рис. 11.3).
Передаточное отношение редуктора с коническими колесами (рис. 11.3) определяют по (11.5) — (11.8). Планетарный редуктор, выполненный по схеме, показанной на рис.2.4, называют редуктором Давида. Передаточное отношение от вала О3 к валу ОН находят по формуле
. (2.11)
Из этого равенства следует, что если
подобрать числа зубьев колес 1, 2, 2´, 3
так, чтобы второй член в уравнении был близок к единице, то передаточное
отношение может быть весьма мало. Возможна модификация редуктора Давида (рис.
11.5) с сателлитом, входящим в два внутренних зацепления. Обычно в этой
модификации ведущим является водило Н, и передаточное отношение от вала ОН к валу О3 определяют по формуле
Возможна модификация редуктора Давида (рис.
11.5) с сателлитом, входящим в два внутренних зацепления. Обычно в этой
модификации ведущим является водило Н, и передаточное отношение от вала ОН к валу О3 определяют по формуле
(11.12)
. (11.13)
Рис. 11.5. Модификация планетарного редуктора Давида
Сателлитные механизмы с двумя или более степенями подвижности называют дифференциальными механизмами или просто дифференциалами. Примером такого дифференциала может служить механизм, у которого соосны колеса 1, 2 и водило Н (рис. 11.6).
Колеса 1, 2 и водило Н вращается с
угловыми скоростями и .
Число подвижных звеньев в механизме , число
вращательных пар V класса .![]() Эти три пары и ,
в которые входят звенья 1, 2 и Н со стойкой, и пара О3,
куда входит водило Н и звено 3. Число пар IV класса . Это входящие в зацепление колеса 1,
3 и 3, 2. Следовательно, по структурной формуле число степеней подвижности
механизма
Эти три пары и ,
в которые входят звенья 1, 2 и Н со стойкой, и пара О3,
куда входит водило Н и звено 3. Число пар IV класса . Это входящие в зацепление колеса 1,
3 и 3, 2. Следовательно, по структурной формуле число степеней подвижности
механизма
. (11.14)
Рис. 11.6. Простейший дифференциальный механизм
Таким образом, для определенности движения механизма необходимы законы движения двух звеньев. Выбор последних может быть произвольным. Например, можно задаться законом движения звеньев 2 и Н, т.е. законами изменения углов поворота и Н звеньев 2 и Н. Тогда угол поворота звена 1
.
По правилу дифференцирования сложных функций с несколькими переменными получаем
,
где
.
Из вышеописанного получим
. (11.15)
Уравнение (11.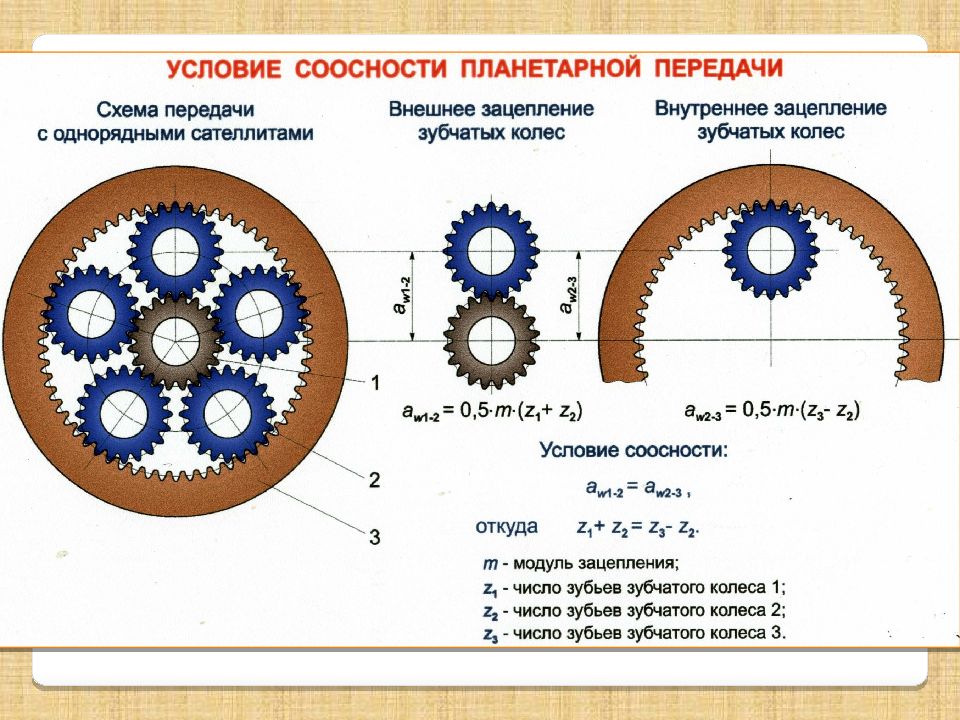 15) связывает угловые скорости звеньев
1, 2 и Н. Угловая скорость колеса 3 не
входит в это уравнение, так как колесо 3 является паразитным (паразитным
называется зубчатое колесо, которое не влияет на величину передаточного отношения
механизма). Частные производные от угла по
углам и (см.
формулу 11.15) являются соответствующими передаточными отношениями при
неподвижных звеньях 2 и
15) связывает угловые скорости звеньев
1, 2 и Н. Угловая скорость колеса 3 не
входит в это уравнение, так как колесо 3 является паразитным (паразитным
называется зубчатое колесо, которое не влияет на величину передаточного отношения
механизма). Частные производные от угла по
углам и (см.
формулу 11.15) являются соответствующими передаточными отношениями при
неподвижных звеньях 2 и
, .
Теперь уравнение (11.15), связывающее угловые скорости звеньев 1, 2 и Н можно переписать в виде
.
Передаточное отношение представляют в виде
.
Тогда
.
После преобразования или
, (2.16)
где и — соответственно количество оборотов в минуту звеньев 1, 2 и Н.
Эта формула является формулой Виллиса для дифференциалов.
Коэффициент полезного действия
В планетарных передачах КПД зависит от
величины потерь во всех зацеплениях, а также от величины и знака передаточного
отношения.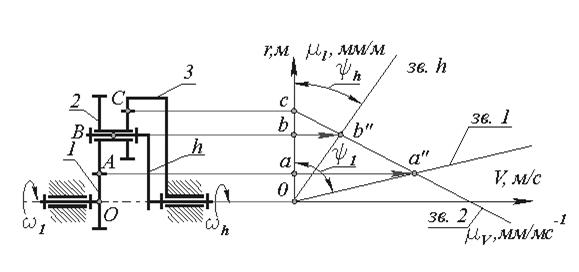
, (11.17)
где и — числа зубьев первого и второго зубчатых колес; — коэффициент трения в зубчатом зацеплении.
При консистентной смазке для открытых зубчатых передах = 0,1…0,16. В формуле (11.17) знак (+) означает внешнее зацепление, (+) — внутреннее.
Полный коэффициент потерь во всех зацеплениях передачи
. (11.18)
КПД исследуемой планетарной передачи рассчитывают по формуле
. (11.19)
Практическая часть
Приборы и принадлежности: прибор типа ДП5А для изучения работы планетарного редуктора, секундомер.
Устройство и работа установки
Прибор ДП5А, изображен на рис. 11.7. Все
узлы смонтированы на литом основании 16, внутри которого расположены блоки
управления прибором.
Узел электродвигателя смонтирован на литом кронштейне 17. Статор электродвигателя 3 установлен в двух шарикоподшипниковых спорах 2 и 6 (балансирный электродвигатель). Ротор электродвигателя упругой муфтой 7 соединяют с входным валом редуктора.
К левой стороне кронштейна 17 закреплен цилиндрический корпус 1, в котором установлен тахометр, измеряющий частоту вращения ротора электродвигателя.
В передней части кронштейна смонтировано измерительное устройство, состоящее из тензоболочки 5, индикатора 4 и державки индикатора. Этим устройством воспринимается и измеряется реактивный момент электродвигателя.
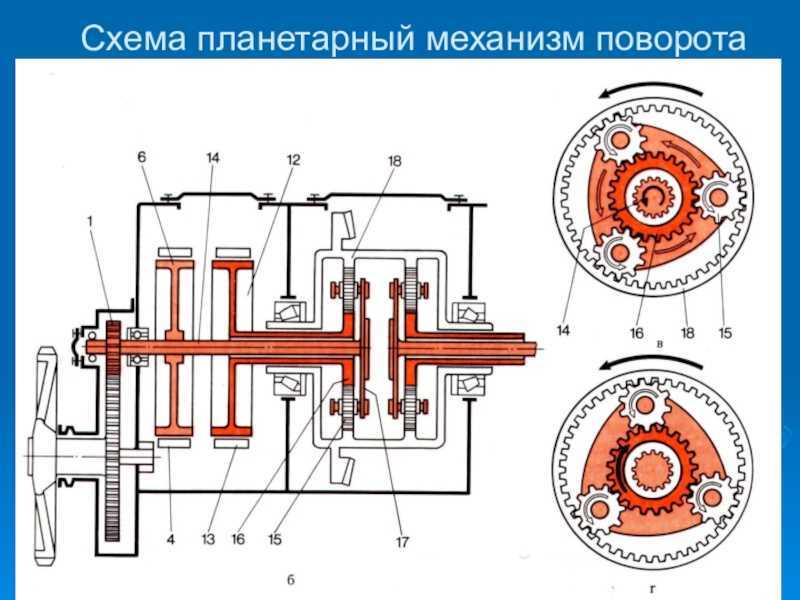
Испытуемый планетарный редуктор 9 представлен
шестью зубчатыми колесами (рис. 11.8). Ведущее зубчатое колесо () вращается вокруг своей оси, а
центральное колесо 3 () жестко связано с корпусом
редуктора. Водило Н с двумя парами сателлитов ()
и (), находящимися в зацеплении с
центральными колесами, выполнено совместно с валиком, который муфтой 10
соединен с нагрузочным устройством.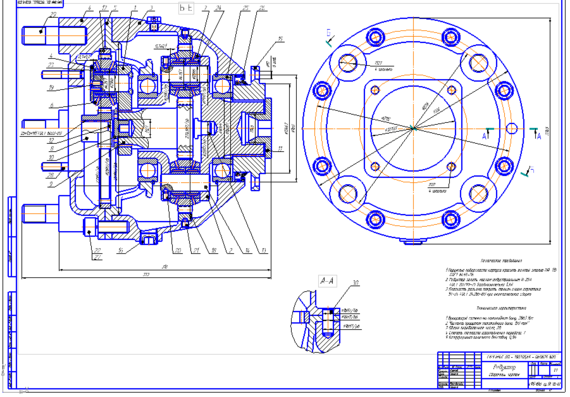
Похожие материалы
Информация о работе
Скачать файл
Выбери свой ВУЗ
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им.
 Даля 166
Даля 166 - ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им. Макарова 543
- НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им. Герцена 123
- РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им. Каразина 305
- ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
 Даля 166
Даля 166 Дегтярева 174
Дегтярева 174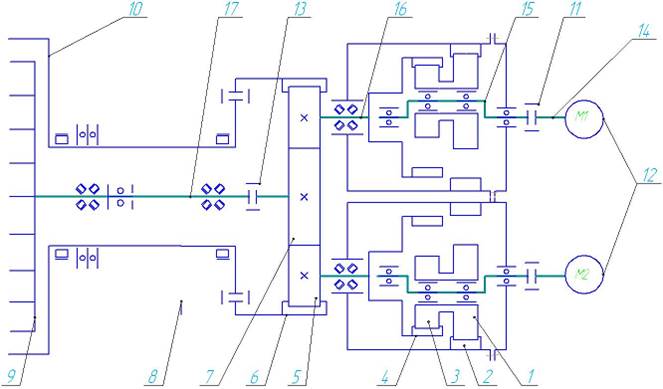 Макарова 543
Макарова 543 Герцена 123
Герцена 123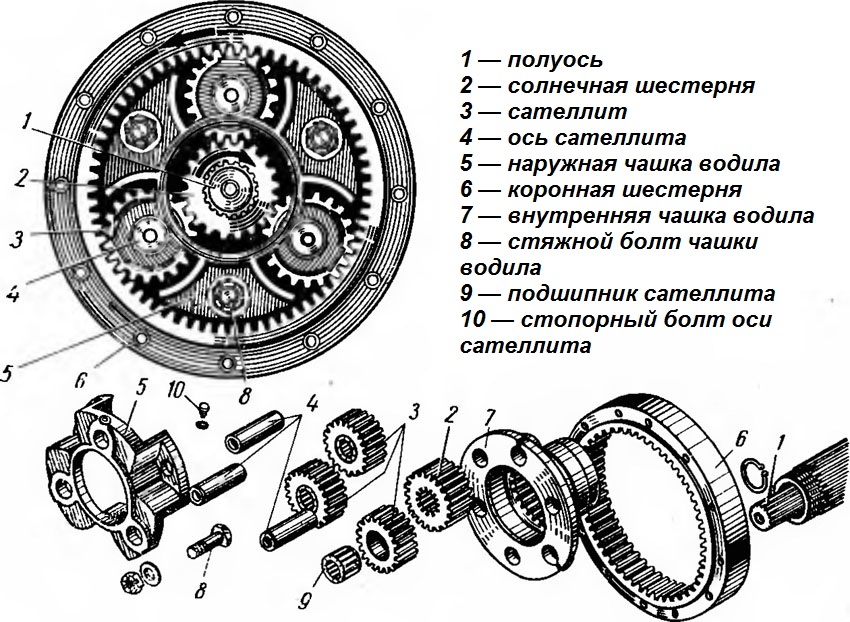 Гагарина 114
Гагарина 114 Каразина 305
Каразина 305Планетарный редуктор: устройство и принцип работы
Одним из механизмов, который применяется для передачи и преобразования вращающего момента является планетарный редуктор. Это одна из разновидностей механических устройств, ее отличительная особенность – в применении планетарной передачи, которая и передает нужную энергию.
Такие агрегаты можно встретить в различных станках, приборах и силовых передачах. Они часто используются в коробках перемены передачи, в дифференциалах в автомобилях, в различной строительной технике. Особенно эффективно применение подобных узлов вместе с электродвигателем. Разберемся, что такое планетарный редуктор и в чем его отличия от других типов устройств.
Разберемся, что такое планетарный редуктор и в чем его отличия от других типов устройств.
Навигация по статье
Из чего состоит планетарная передача
Как работает планетарный редуктор
Отличие планетарного редуктора от других редукторов
Из чего состоит планетарная передача
Как мы уже отметили, агрегат имеет в своей основе планетарную передачу. Она строится на основе зубчатого механизма, в котором оси некоторых колес являются подвижными и вращаются вокруг определенной оси. Во многом это напоминает движение планет, из-за чего такая передача и получила свое характерное название.
Планетарная передача может состоять из различных элементов. Мы рассмотрим ее на примере наиболее универсальной и популярной схемы. В состав входят следующие детали:
-
Солнечная шестерня. Представляет небольшое зубчатое колесо, имеющее внешние зубья. Располагается в самом центре механизма.
- Коронная шестерня (эпицикл). Зубчатое колесо большого диаметра, которое имеет уже внутренние зубья.
- Сателлиты. Это – небольшие зубчатые колеса, имеющие внешние зубья. Они находятся между двумя шестернями и одновременно зацеплены с каждой из них.
- Водило. Небольшая деталь, которая служит для механического соединения всех сателлитов. На водиле располагаются основные оси вращения сателлитов.
 Располагается в самом центре механизма.
Располагается в самом центре механизма.В качестве входного элемента в узле может использоваться как солнечная или коронная шестерня, так и водило. Аналогично, в качестве выходного элемента передачи служит один из трех компонентов системы. Схема планетарного редуктора часто предполагает неподвижность третьего элемента, тогда передача работает по принципу повышающего или понижающего редуктора. Если узел является движущимся, то передача чаще выступает в роли дифференциала.
Планетарная передача обычно применяется в приводах малой мощности в составе планетарных редукторов. Такой механизм может включать сразу несколько передач, которые собираются последовательно, то есть представляют отдельные ступени механизма. Первая ступень устанавливается непосредственно на вал, далее на водило первой передачи устанавливается солнечная шестерня второй передачи и т. д.
Такой механизм может включать сразу несколько передач, которые собираются последовательно, то есть представляют отдельные ступени механизма. Первая ступень устанавливается непосредственно на вал, далее на водило первой передачи устанавливается солнечная шестерня второй передачи и т. д.
Как работает планетарный редуктор
Работа и показатели агрегата во многом зависят от кинематической схемы привода. При простейшей конструкции планетарной передачи работа всего агрегата происходит по следующему принципу. Солнечная шестерня приводится во вращение. Одновременно с ней начинают двигаться сцепленные сателлиты. По мере всего движения сателлиты перекатываются по солнечной и коронной шестерне, приводя в движение водило. Такой принцип работы планетарного редуктора характерен для агрегатов с остановленным эпициклом.
Также в качестве входа часто используется солнечная шестерня, а в качестве выхода – водило. Как мы уже отметили, для входа и выхода может применяться один из трех элементов передачи. Оставшийся третий – затормаживается. Изменение входа и выхода влияет на величину и знак передаточного числа. Всего возможно шесть различных способов включения передачи.
Оставшийся третий – затормаживается. Изменение входа и выхода влияет на величину и знак передаточного числа. Всего возможно шесть различных способов включения передачи.
В некоторых случаях возможно одновременное вращение и солнечной шестерни, и эпицикла, и водила. В этом случае механизм будет работать в качестве дифференциала, что позволит сложить угловые скорости на разных входах или разложить – на выходах.
В классическом исполнении планетарный редуктор включает в себя червячные или зубчатые пары, различные уплотнения, сальники и т. д. Частным примером такого устройства служит шариковый подшипник, корпус которого состоит из двух компонентов – крышки и основания.
Мощность устройств тоже различается в зависимости типоразмеров и конструктивных особенностей. Например, в линейке FLENDER представлены узлы горизонтального и вертикального исполнения с мощностью от 30 до 13000 кВт.
Отличие планетарного редуктора от других редукторов
На практике основой для редуктора планетарного типа становится именно планетарная передача. Помимо нее, в состав механизма входит корпус, опорные подшипники и два вала (входной и выходной). Также в конструкцию могут включаться различные детали для подключения двигателя, вала нагрузки и т. д.
Помимо нее, в состав механизма входит корпус, опорные подшипники и два вала (входной и выходной). Также в конструкцию могут включаться различные детали для подключения двигателя, вала нагрузки и т. д.
Мы уже отметили, что очень часто используется принцип последовательного подключения нескольких планетарных передач. Связано это с тем, что передаточное число узлов находится в диапазоне 25–400, тогда как на практике нередко требуются более высокие значения. В результате можно увеличить показатели до нескольких десятков тысяч.
Планетарный редуктор, как правило, имеет маленький диаметр, особенно, если сравнивать его с устройствами с похожим номинальным моментом.
Существует множество разновидностей редукторов такого типа, которые различаются по конструкции и своим характеристикам. Например, некоторые виды планетарных редукторов имеют несколько солнечных шестерен, эпициклов и водил. Также нередко плоскости вращения элементов не параллельны друг другу (в так называемых пространственных механизмах), а располагаются под углом.
При построении устройства с использованием зубчатых колес (например, косозубых), удается придать агрегату новые свойства. Например, сделать его малошумным или более надежным.
Изменению нередко подвергается и количество сателлитов. В стандартном агрегате применяется от трех до шести компонентов (в среднем эта цифра составляет 3–4). Форма сателлитов также может быть самой разной: популярностью пользуются двухвенцовые зубчатые колеса и подпружиненные элементы.
Также можно найти механизмы с различным люфтом. Он может составлять от нескольких градусов (в стандартных вариантах) или быть практически нулевым (в низколюфтовых редукторах, имеющих специальную конструкцию).
В целом же устройство и принцип работы планетарных редукторов схож с агрегатами другого типа. Как показывает практика, такие механизмы обеспечивают оптимальное распределение нагрузки и высокую точность работы приводов. При необходимости специалисты «Ф и Ф» готовы ответить на оставшиеся вопросы и помочь вам с выбором агрегата такого типа!
Другие статьи
Предохранительные муфты
Предохранительные муфты входят в число наиболее ответственных узлов привода, обеспечивающих не только передачу крутящего момента, но и защиту оборудования от чрезмерных нагрузок и др. нештатных ситуаций. Компания «Ф и Ф», в качестве официального представителя в России, предлагает большой выбор муфт одного из ведущих мировых производителей – компании FLENDER.
нештатных ситуаций. Компания «Ф и Ф», в качестве официального представителя в России, предлагает большой выбор муфт одного из ведущих мировых производителей – компании FLENDER.
Привод для конвейера
В организации ритмичной работы технологической цепочки промышленных предприятий конвейер играет одну из главных, если не главную роль. При правильном проектировании и использовании надежного оборудования конвейер будет приносить огромную прибыль, при недочётах и непродуманном выборе производителя и поставщика – простои и материальные убытки.
Типы редукторов для химической промышленности
Разберемся, чем должны отличаться редукторы для химической промышленности и что следует учесть при выборе устройств.
Кинематический анализ систем планетарных передач с использованием блок-схем | Дж. Мех. Дес.
Пропустить пункт назначения навигации
Инновации в дизайне
Ми-Чинг Цай,
Ченг-Чи Хуанг,
Бор-Джен Лин
Информация об авторе и статье
Дж. Мех. Дез . июнь 2010 г., 132(6): 065001 (10 страниц)
Мех. Дез . июнь 2010 г., 132(6): 065001 (10 страниц)
https://doi.org/10.1115/1.4001598
Опубликовано в Интернете: 25 мая 2010 г.
История статьи
Взгляды
- Содержание артикула
- Рисунки и таблицы
- Видео
- Аудио
- Дополнительные данные
- Экспертная оценка
- Твиттер
- MailTo
Иконка Цитировать Цитировать
Разрешения
Цитирование
Цай М. , Хуан С. и Линь Б. (25 мая 2010 г.). «Кинематический анализ систем планетарных передач с использованием блок-схем». КАК Я. Дж. Мех. Дез . июнь 2010 г.; 132(6): 065001. https://doi.org/10.1115/1.4001598
, Хуан С. и Линь Б. (25 мая 2010 г.). «Кинематический анализ систем планетарных передач с использованием блок-схем». КАК Я. Дж. Мех. Дез . июнь 2010 г.; 132(6): 065001. https://doi.org/10.1115/1.4001598
Скачать файл цитаты:
- Рис (Зотеро)
- Менеджер ссылок
- EasyBib
- Подставки для книг
- Менделей
- Бумаги
- Конечная примечание
- РефВоркс
- Бибтекс
- Процит
- Медларс
Расширенный поиск
В этой статье используются методы управления для анализа кинематических взаимосвязей с помощью блок-схем для планетарных зубчатых передач. Выявленные уравнения касательной скорости в каждой точке контакта механических зубчатых передач используются для построения блок-схем. Затем используются концепции стратегий обратной связи и прямой связи, чтобы проиллюстрировать функции снижения и увеличения скорости в кинематике с анализом чувствительности. Конструктивное отличие необычных планетарных передач от обычных также объясняется на основе характеристического уравнения стратегий обратной связи для конструктивных ограничений по условиям устойчивости. Планетарная передача с кулачковым управлением дополнительно проиллюстрирована для ограничения и кинематического анализа с использованием метода блок-схемы и характеристического уравнения, и получены расчетные модели для чувствительности и выходного сигнала движения этой планетарной передачи. Благодаря взаимосвязи между управлением и кинематикой эта статья представляет собой руководство для инженеров в различных областях, позволяющее легко понять функцию механического проектирования.
Конструктивное отличие необычных планетарных передач от обычных также объясняется на основе характеристического уравнения стратегий обратной связи для конструктивных ограничений по условиям устойчивости. Планетарная передача с кулачковым управлением дополнительно проиллюстрирована для ограничения и кинематического анализа с использованием метода блок-схемы и характеристического уравнения, и получены расчетные модели для чувствительности и выходного сигнала движения этой планетарной передачи. Благодаря взаимосвязи между управлением и кинематикой эта статья представляет собой руководство для инженеров в различных областях, позволяющее легко понять функцию механического проектирования.
Раздел выпуска:
Инновационный дизайн
Ключевые слова:
графы потоков данных, инженерное проектирование, обратная связь, прямая связь, шестерни, кинематика, график потока сигналов, блок-схема, планетарная передача, планетарная передача, кулачковый, кинематический, обратная связь, прямая связь, характеристическое уравнение, планетарная передача с кулачковым управлением
Темы:
Планетарные передачи, Обратная связь, Кинематика, Шестерни, Упреждающее управление, Передаточные функции, Кинематический анализ
1.
Liu
,
YH
, 2004, «
Планетарный дифференциал
», патент США № 6, 777.
2.
Армингтон
,
S. F.
, 1960, «
Составной планетарный редуктор
», патент США № 2,941,423.
3.
Hsieh
,
W. H.
, 2007 г., «
Экспериментальное исследование планетарных зубчатых передач с кулачковым управлением
»,
3 Mech. Мах. Теория
0094-114X,
42
, стр.
513
–
525
.
4.
Mason
,
SJ
, 1953, «
Теория обратной связи: некоторые свойства графиков потока сигналов
»,
Proc. ИРЭ
ИРЭ
0096-8390,
41
, стр.
1144
–
1156
.
5.
Wojnarowski
,
J.
и
Lidwin
,
A.
, 1975, «
»,
Мех. Мах. Теория
0094-114X,
10
(
1
), с.
6.
Wojnarowski
,
J.
, 1976, «
Графовый метод определения нагрузок в сложных зубчатых передачах
»,
3. Мах. Теория
0094-114X,
11
, стр.
103
–
121
.
7.
Pennestrì
,
E.
и
Freudenstein
,
F.
, 1993, «
Систематический подход к мощному и STATAC Цилиндрические зубчатые передачи
”,
ASME J. Mech. Дес.
0161-8458,
115
, стр.
639
–
644
.
8.
MA
,
R.
и
Gupta
,
K. C.
, 1994, «
Графики потока сигналов для поездов Spatial Gear
,
J. Asme J. мех. Дес.
Asme J. мех. Дес.
0161-8458,
116
, стр.
326
–
331
.
9.
Uematsu
,
S.
, 1997, “
Применение теории графов к кинематическому анализу планетарных передач
”,
J. Jpn. соц. Точный англ.
0374-3543,
31
(
2
), с.
10.
HSU
,
C. H.
и
LAM
,
K. T.
, 1992, «
.
»,
ASME J. Мех. Дес.
Дес.
0161-8458,
114
, стр.
196
–
200
.
11.
HSIEH
,
H. I.
и
TSAI
,
L. W.
, 1996, «
Kinematic Analysis of Epicyclic -type Mechanismess Arnerismish Antritions».
»,
ASME J. Mech. Дес.
0161-8458,
118
, стр.
294
–
299
.
12.
Nelson
,
C. A.
и
Cipra
,
R. J.
J.
, 2005, «
Упрощенный кинематический анализ Epicycic Gear Keer с помощью Power-Flow и эффективности к Power-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow Анализы
»,
ASME J. Mech. Дес.
0161-8458,
127
, стр.
278
–
286
.
13.
Wojnarowski
,
J.
,
Kopec
,
J.
, and
Zawislak
,
S.
, 2006, “
Gears и графики
»,
Журнал теоретической и прикладной механики
1429-2955,
44
(
1
), стр.
139
–
162
; см. http://www.ptmts.org.pl/jtam.htmlhttp://www.ptmts.org.pl/jtam.html.
14.
Chesmond
,
C. J.
, 1984,
Technology Technology
,
Эдвард Арнольд
,
Лондон
.
15.
Куо
,
Б.К.
, 1991,
Системы автоматического управления
, 6-е изд.,
Prentice-Hall
,
Englewood Cliffs, NJ
.
16.
Phillips
,
C. L.
и
Harbour
,
R.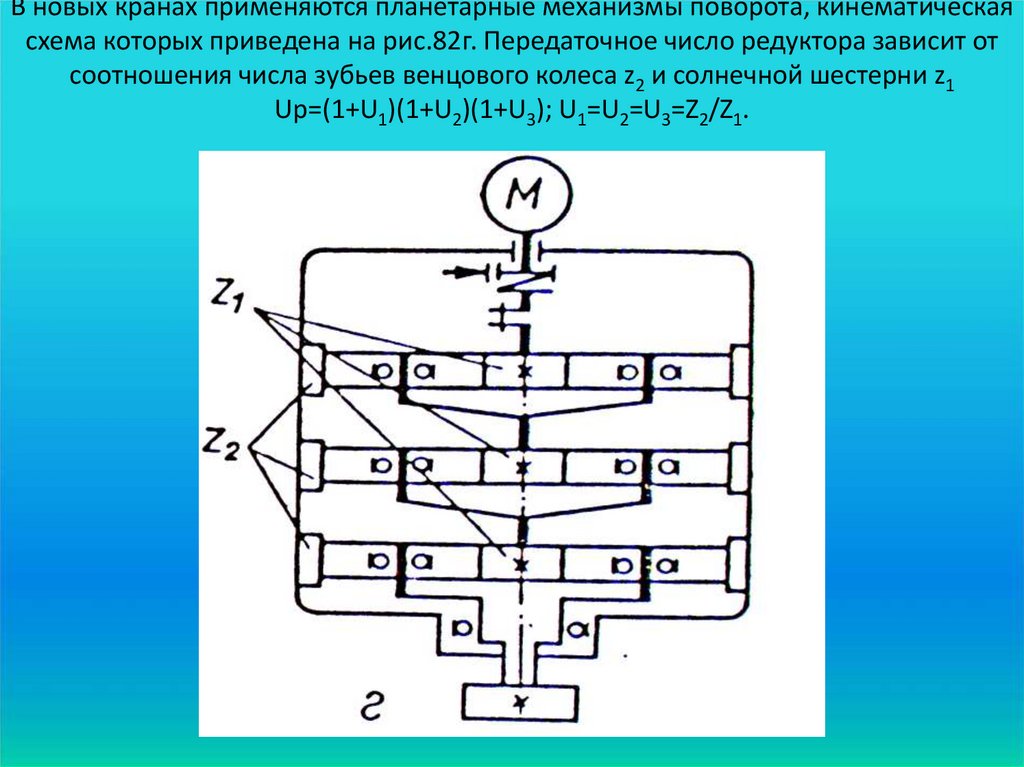 D.
D.
, 1991,
Системы управления обратной связью
, 2ndd Ed.,
. ,
Энглвуд Клиффс, Нью-Джерси
.
17.
Склейтер
,
N.
и
Chironis
,
N. P.
, 1991,
Механизмы и механические устройства.
172
.
18.
Hopgood
,
A. A.
, 2001,
Интеллектуальные системы для инженеров и ученых
, 3 RC
0003
Бока-Ратон, Флорида
, стр.
410
–
412
.
19.
Wilson
,
C. E.
,
SADLER
,
J. P.
и
Michels
,
W. J.
, 1983,
,
,
4,
,
,
,
4,
,
,
,
,
,
,
,
,
,
,
,
,
,
4,
,
,
,
4,
,
,
.
,
Harper & Row
,
Нью-Йорк
.
20.
Norton
,
R. L.
, 2002,
CAM DESIGN and Manufacturing Handbook
,
Industrial Press Inc.
,
New York
, pp.
393
–
422
.
В настоящее время у вас нет доступа к этому содержимому.
25,00 $
Покупка
Товар добавлен в корзину.
Проверить Продолжить просмотр Закрыть модальныйКинематический анализ систем планетарных передач с использованием блок-схем | Дж. Мех. Дес.
Пропустить пункт назначения навигации
Инновации в дизайне
Ми-Чинг Цай,
Ченг-Чи Хуанг,
Бор-Джен Лин
Информация об авторе и статье
Дж. Мех. Дез . Июнь 2010 г., 132(6): 065001 (10 страниц)
https://doi.org/10. 1115/1.4001598
1115/1.4001598
Опубликовано в Интернете: 25 мая 2010 г.
История статьи
0003
- Взгляды
- Содержание артикула
- Рисунки и таблицы
- Видео
- Аудио
- Дополнительные данные
- Экспертная оценка
- Делиться
- Твиттер
- MailTo
Иконка Цитировать Цитировать
Разрешения
- Поиск по сайту
Цитирование
Цай М. , Хуан С. и Линь Б. (25 мая 2010 г.). «Кинематический анализ систем планетарных передач с использованием блок-схем». КАК Я. Дж. Мех. Дез . июнь 2010 г.; 132(6): 065001. https://doi.org/10.1115/1.4001598
, Хуан С. и Линь Б. (25 мая 2010 г.). «Кинематический анализ систем планетарных передач с использованием блок-схем». КАК Я. Дж. Мех. Дез . июнь 2010 г.; 132(6): 065001. https://doi.org/10.1115/1.4001598
Скачать файл цитаты:
- Рис (Зотеро)
- Менеджер ссылок
- EasyBib
- Подставки для книг
- Менделей
- Бумаги
- Конечная примечание
- РефВоркс
- Бибтекс
- Процит
- Медларс
Расширенный поиск
В этой статье используются методы управления для анализа кинематических взаимосвязей с помощью блок-схем для планетарных зубчатых передач. Выявленные уравнения касательной скорости в каждой точке контакта механических зубчатых передач используются для построения блок-схем. Затем используются концепции стратегий обратной связи и прямой связи, чтобы проиллюстрировать функции снижения и увеличения скорости в кинематике с анализом чувствительности.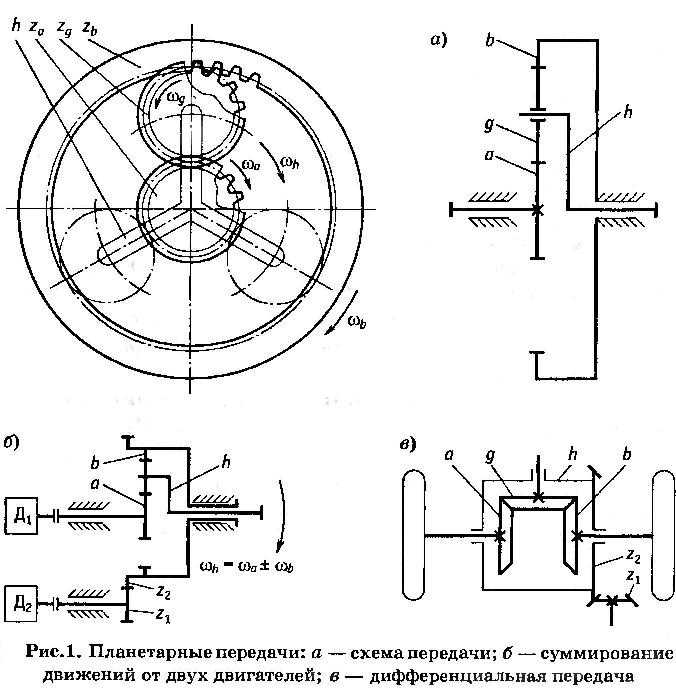 Конструктивное отличие необычных планетарных передач от обычных также объясняется на основе характеристического уравнения стратегий обратной связи для конструктивных ограничений по условиям устойчивости. Планетарная передача с кулачковым управлением дополнительно проиллюстрирована для ограничения и кинематического анализа с использованием метода блок-схемы и характеристического уравнения, и получены расчетные модели для чувствительности и выходного сигнала движения этой планетарной передачи. Благодаря взаимосвязи между управлением и кинематикой эта статья представляет собой руководство для инженеров в различных областях, позволяющее легко понять функцию механического проектирования.
Конструктивное отличие необычных планетарных передач от обычных также объясняется на основе характеристического уравнения стратегий обратной связи для конструктивных ограничений по условиям устойчивости. Планетарная передача с кулачковым управлением дополнительно проиллюстрирована для ограничения и кинематического анализа с использованием метода блок-схемы и характеристического уравнения, и получены расчетные модели для чувствительности и выходного сигнала движения этой планетарной передачи. Благодаря взаимосвязи между управлением и кинематикой эта статья представляет собой руководство для инженеров в различных областях, позволяющее легко понять функцию механического проектирования.
Раздел выпуска:
Инновационный дизайн
Ключевые слова:
графы потоков данных, инженерное проектирование, обратная связь, прямая связь, шестерни, кинематика, график потока сигналов, блок-схема, планетарная передача, планетарная передача, кулачковый, кинематический, обратная связь, прямая связь, характеристическое уравнение, планетарная передача с кулачковым управлением
Темы:
Планетарные передачи, Обратная связь, Кинематика, Шестерни, Упреждающее управление, Передаточные функции, Кинематический анализ
1.
Liu
,
YH
, 2004, «
Планетарный дифференциал
», патент США № 6, 777.
2.
Армингтон
,
S. F.
, 1960, «
Составной планетарный редуктор
», патент США № 2,941,423.
3.
Hsieh
,
W. H.
, 2007 г., «
Экспериментальное исследование планетарных зубчатых передач с кулачковым управлением
»,
3 Mech. Мах. Теория
0094-114X,
42
, стр.
513
–
525
.
4.
Mason
,
SJ
, 1953, «
Теория обратной связи: некоторые свойства графиков потока сигналов
»,
Proc. ИРЭ
ИРЭ
0096-8390,
41
, стр.
1144
–
1156
.
5.
Wojnarowski
,
J.
и
Lidwin
,
A.
, 1975, «
»,
Мех. Мах. Теория
0094-114X,
10
(
1
), с.
6.
Wojnarowski
,
J.
, 1976, «
Графовый метод определения нагрузок в сложных зубчатых передачах
»,
3. Мах. Теория
0094-114X,
11
, стр.
103
–
121
.
7.
Pennestrì
,
E.
и
Freudenstein
,
F.
, 1993, «
Систематический подход к мощному и STATAC Цилиндрические зубчатые передачи
”,
ASME J. Mech. Дес.
0161-8458,
115
, стр.
639
–
644
.
8.
MA
,
R.
и
Gupta
,
K. C.
, 1994, «
Графики потока сигналов для поездов Spatial Gear
,
J. Asme J. мех. Дес.
Asme J. мех. Дес.
0161-8458,
116
, стр.
326
–
331
.
9.
Uematsu
,
S.
, 1997, “
Применение теории графов к кинематическому анализу планетарных передач
”,
J. Jpn. соц. Точный англ.
0374-3543,
31
(
2
), с.
10.
HSU
,
C. H.
и
LAM
,
K. T.
, 1992, «
.
»,
ASME J. Мех.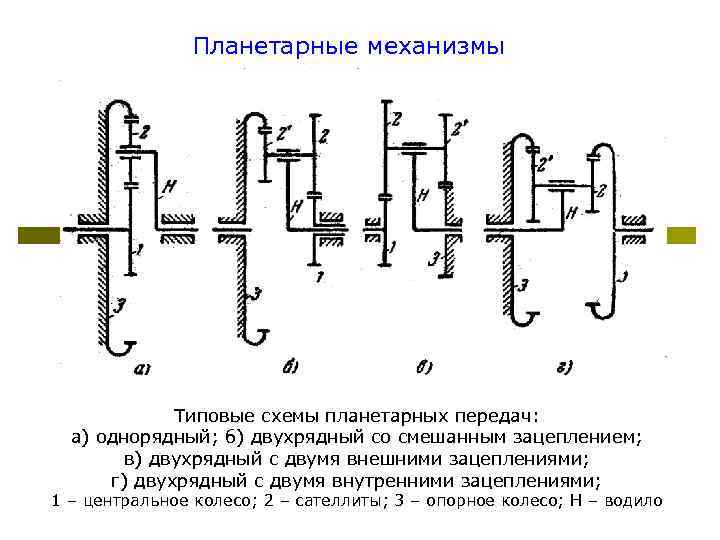 Дес.
Дес.
0161-8458,
114
, стр.
196
–
200
.
11.
HSIEH
,
H. I.
и
TSAI
,
L. W.
, 1996, «
Kinematic Analysis of Epicyclic -type Mechanismess Arnerismish Antritions».
»,
ASME J. Mech. Дес.
0161-8458,
118
, стр.
294
–
299
.
12.
Nelson
,
C. A.
и
Cipra
,
R.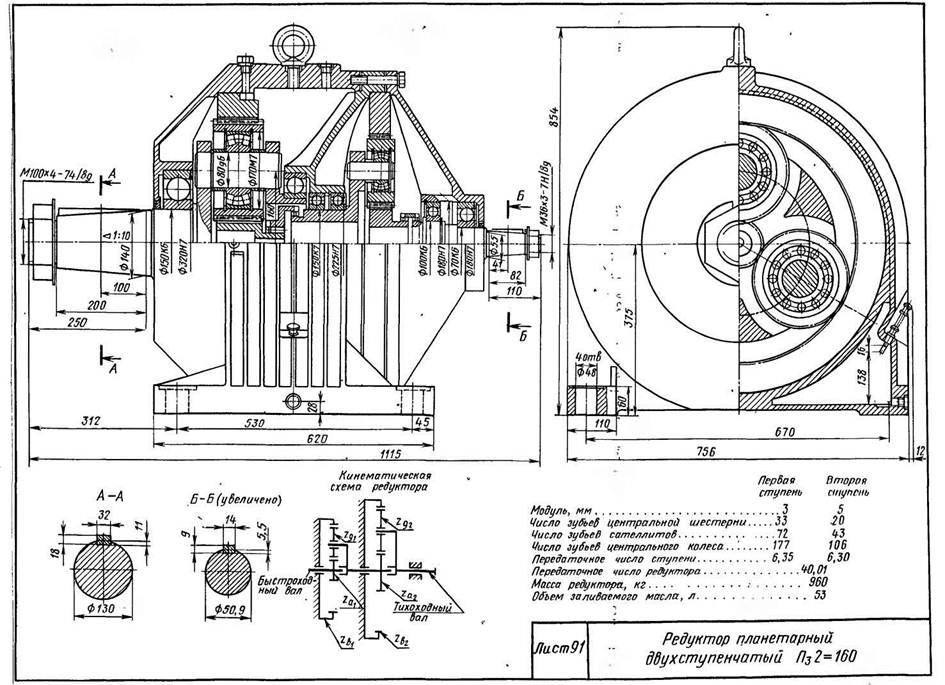 J.
J.
, 2005, «
Упрощенный кинематический анализ Epicycic Gear Keer с помощью Power-Flow и эффективности к Power-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow-Flow Анализы
»,
ASME J. Mech. Дес.
0161-8458,
127
, стр.
278
–
286
.
13.
Wojnarowski
,
J.
,
Kopec
,
J.
, and
Zawislak
,
S.
, 2006, “
Gears и графики
»,
Журнал теоретической и прикладной механики
1429-2955,
44
(
1
), стр.
139
–
162
; см. http://www.ptmts.org.pl/jtam.htmlhttp://www.ptmts.org.pl/jtam.html.
14.
Chesmond
,
C. J.
, 1984,
Technology Technology
,
Эдвард Арнольд
,
Лондон
.
15.
Куо
,
Б.К.
, 1991,
Системы автоматического управления
, 6-е изд.,
Prentice-Hall
,
Englewood Cliffs, NJ
.
16.
Phillips
,
C. L.
и
Harbour
,
R.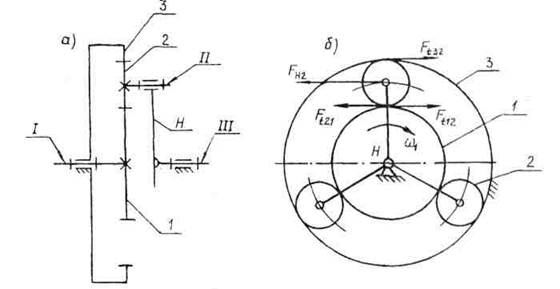 D.
D.
, 1991,
Системы управления обратной связью
, 2ndd Ed.,
. ,
Энглвуд Клиффс, Нью-Джерси
.
17.
Склейтер
,
N.
и
Chironis
,
N. P.
, 1991,
Механизмы и механические устройства.
172
.
18.
Hopgood
,
A. A.
, 2001,
Интеллектуальные системы для инженеров и ученых
, 3 RC
0003
Бока-Ратон, Флорида
, стр.
410
–
412
.
19.
Wilson
,
C. E.
,
SADLER
,
J. P.
и
Michels
,
W. J.
, 1983,
,
,
4,
,
,
,
4,
,
,
,
,
,
,
,
,
,
,
,
,
,
4,
,
,
,
4,
,
,
.
,
Harper & Row
,
Нью-Йорк
.
20.
Norton
,
R. L.
, 2002,
CAM DESIGN and Manufacturing Handbook
,
Industrial Press Inc.
,
New York
, pp.![]()