
Рулевой привод
|
Механизмы управления автомобиля
|
Рулевой привод включает в себя систему тяг, шарниров и рычагов, осуществляющих с механизмом рулевого управления поворот управляемых колес. Рулевой привод имеет рулевую трапецию, которая позволяет поворачивать управляемые колеса на разные углы, чем достигается их качение без бокового проскальзывания. Рулевая трапеция может быть задней или передней, т. е. с поперечной рулевой тягой, расположенной сзади переднего моста или перед ним. Различают цельную (единую) трапецию, применяемую при зависимой подвеске колес и расчлененную, используемую при независимой подвеске.
Рулевой привод с зависимой подвеской автомобиля
Рулевой привод грузовых автомобилей с зависимой подвеской включает в себя: сошку, продольную тягу, два левых поворотных рычага, поперечную тягу, правый поворотный рычаг, рулевую трапецию (шарнирный четырехугольник, образованный средней частью балки передней оси, поперечной тягой и левым и правым поворотными рычагами).
При движении автомобиля по неровной дороге на детали рулевого привода (сошку, продольную и поперечную рулевые тяги, рулевые рычаги) действуют большие нагрузки. Поэтому в рулевой привод вводят пружины для смягчения толчков и для автоматического устранения зазоров, возникающих при изнашивании деталей. Поперечная рулевая тяга на одном конце имеет левую резьбу и правую на другом для навинчивания наконечников крепления шаровых шарниров. Вследствие этого можно изменять расстояние между шарнирами при регулировании схождения управляемых колес.
Рулевой привод с независимой подвеской
При независимой подвеске управляемых колес легковых автомобилей рулевой привод включает в себя (с червячным механизмом рулевого управления): сошку; маятниковый рычаг; составную поперечную тягу, состоящую из средней тяги, шарнирно соединенной по концам с сошкой и маятниковым рычагом и две боковые тяги; левый и правый поворотные рычаги.
Рулевой привод и рулевые тяги автомобиля ГАЗ-24 «Волга»
1 — шплинт; 2 — резьбовая пробка; 3 — пружина; 4 — опорная пята; 5— корпус шарнира; 6 и 10 — резиновые уплотнители; 7— распорная втулка наконечника; 8 — гайка; 9— распорная втулка тяги; 11— шаровой палец; 12 — корпус шарнира; 13 — полиэтиленовый сухарь; 14 — маятниковый рычаг; 15 — втулка из порошкового материала; 16 — резиновая втулка рычага; 17 — поперечная тяга; 18 — боковая тяга; 19 — сошка; 20 — болт; 21 — стяжной хомут; 22 — регулировочная трубка; 23 — наконечник тяги; 24 — рычаг поворотного кулака.
Независимая подвеска легковых автомобилей с реечным механизмом рулевого управления состоит из составной поперечной тяги, средней частью которой является зубчатая рейка механизма рулевого управления, к ней шарнирно крепятся (по концам или в одном месте) боковые тяги. Боковые тяги, в свою очередь, крепятся шарнирно к поворотным рычагам (левому и правому). Трапеция состоит из средней части передней оси, составной поперечной тяги и поворотных (левого и правого) рычагов.
 Шарниры тяг с полусферическими пальцами саморегулирующиеся разборные. Использование высококачественных конструкционных материалов для сухарей, современных смазочных материалов и надежных уплотнений позволяет в настоящее время применять шарниры, не требующие замены смазочного материала в течение всего их срока службы.
Шарниры тяг с полусферическими пальцами саморегулирующиеся разборные. Использование высококачественных конструкционных материалов для сухарей, современных смазочных материалов и надежных уплотнений позволяет в настоящее время применять шарниры, не требующие замены смазочного материала в течение всего их срока службы.
Шарнирное соединение деталей рулевого привода автомобилей
а — ГАЗ-53А; 6-ЗИЛ-130; в — МАЗ; 1— масленка; 2 — пята; 3 — коническая пружина; 4 — крышка; 5-стопорное кольцо; 6 и 15 — наконечники; 7 и 17— трубы; 8 — резиновое кольцо; 9— обойма; 10 — резиновый колпак; 11 — кольцо; 12 — полусферический палец; 13 и 19 — сухари; 14-сменный вкладыш; 16 — хомут; 18 — пробка; 20 — пружина; 21 — ограничитель.
Рулевой привод автомобиля.
Приводом (силовым приводом) в механике называют совокупность устройств, предназначенных для приведения в действие механизмов и машин. В общем случае силовой привод служит для дистанционного управления исполнительным органом машины, передавая ему усилие, прикладываемое к органам управления.
В общем случае силовой привод служит для дистанционного управления исполнительным органом машины, передавая ему усилие, прикладываемое к органам управления.
Рулевой привод обеспечивает кинематическую связь рулевого механизма и управляемых колес. Он должен преобразовывать вращение вала рулевого механизма или поступательное движение рейки во вращение управляемых колес вокруг вертикальной оси для совершения автомобилем маневра.
В рулевой привод входят все детали, передающие усилие от рулевого механизма к управляемым колесам. Иными словами, все, что находится между рулевым механизмом и управляемыми колесами, относится к рулевому приводу.
Обязательным элементом рулевого привода является рулевая трапеция (рис. 2), обеспечивающая поворот управляемых колес на различные углы.
Элементы рулевого управления автомобиля представлены на рис. 3 здесь (страница откроется в отдельном окне браузера). Воздействие на рулевую трапецию осуществляется механическим приводом, состоящим из сошки 11, продольной рулевой тяги 10 и поворотных рычагов 7.
***
Требования к рулевому приводу
К рулевому приводу предъявляют следующие требования:
- обеспечение правильного соотношения углов поворота управляемых колес;
- исключение или уменьшение автоколебаний управляемых колес;
- исключение самопроизвольного поворота управляемых колес при колебании автомобиля на подвеске.
Самопроизвольный поворот («рыскание») управляемых колес может иметь место из-за несогласованности кинематики перемещения подвески и продольной рулевой тяги. При расположении рулевого механизма, как показано на рис. 1, б, вертикальное перемещение передней оси неизбежно приведет к продольному перемещению тяги и повороту колес. Значительно лучше кинематическое согласование достигается при компоновке рулевого управления перед передней осью (рис. 1, а).
Одно из требований безопасности – отсутствие зазоров в шарнирах привода. По способу устранения зазора шарниры привода могут быть саморегулируемые, с периодической ручной регулировкой и нерегулируемые.
Саморегулируемые шарниры не требуют регулировок в процессе эксплуатации – появляющийся в результате изнашивания деталей зазор устраняется поджиманием сухарей к головке рулевого пальца с помощью пружины.
Периодически регулируемые шарниры имеют в конструкции специальную резьбовую пробку, затяжка которой устраняет зазоры между деталями.
Нерегулируемые шарниры используют на автомобилях, колеса которых поворачиваются только вокруг вертикальной оси. Эти шарниры проще по конструкции и дешевле в изготовлении, но менее долговечны.
Кроме того, в конструкциях рулевых приводов легковых автомобилей широко применяются нерегулируемые шарниры с вкладышами из синтетических материалов, хорошо противостоящих изнашиванию и обладающих низким коэффициентом трения. ***
Основные параметры рулевого привода
Основным оценочным параметром рулевого привода являются общее угловое передаточное число Uрп рулевого привода и КПД рулевого привода.
Общим угловым передаточным числом (кинематическим передаточным числом рулевого привода) называют отношение углового перемещения сошки к среднему угловому перемещению поворотных цапф управляемых колес.
Под силовым передаточным числом привода понимают отношение суммарного момента на поворотных цапфах всех управляемых колес к моменту на рулевой сошке.
КПД рулевого привода оценивает потери мощности в шарнирах рулевых тяг и шкворневых устройств управляемых колес.
Для автомобилей с передним управляемым мостом – потери в шкворнях составляют 40…50 %, в шарнирах рулевых тяг – 10…15 %. КПД рулевого привода (0,92…0,95) определяется как отношение силового передаточного числа к кинематическому.
***
Классификация рулевых приводов
Рулевые приводы различаются по следующим конструктивным признакам и свойствам:
— по взаимному расположению рулевого колеса и рулевого вала – с раздельным или совмещенным расположением.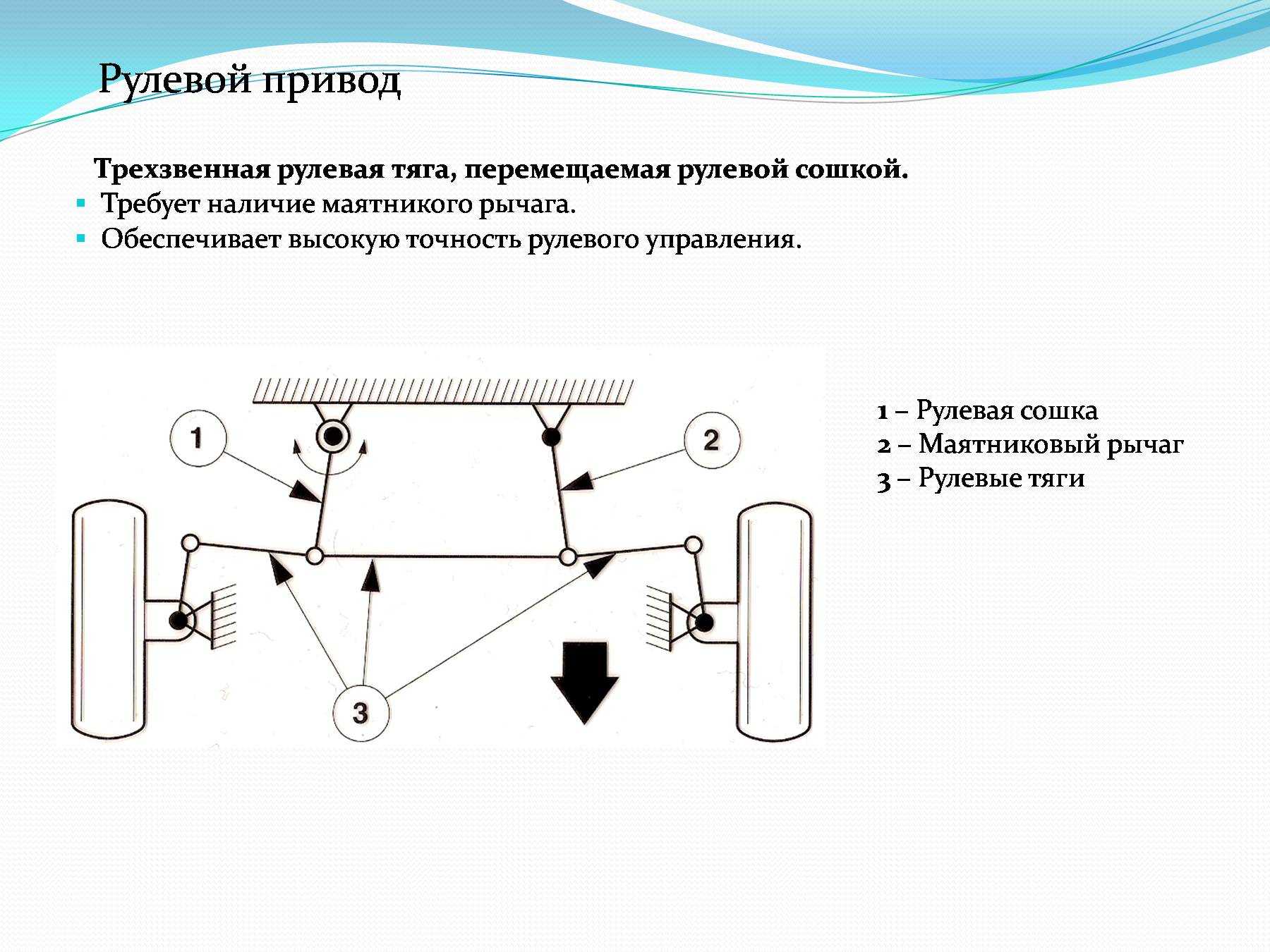
При раздельном расположении рулевого вала и рулевого колеса их соединяют карданным валом, резиновой полумуфтой, сильфонным или перфорированным патрубком. При аварии такая конструкция обеспечивает травмобезопасность, так как при прямом ударе вал складывается и не перемещает рулевое колесо.
Кроме того, раздельное расположение вала и руля позволяет решить и некоторые другие технические задачи.
— по расположению рулевой трапеции – с передним или задним расположением относительно оси управляемых колес.
Варианты расположения и устройства рулевой трапеции при проектировании рулевого управления автомобиля определяются компоновочными возможностями. Схемы основных типов рулевых трапеций представлены на рис. 2 .
— по конструкции поперечной тяги – с цельной или разрезной тягой.
При применении зависимой подвески и неразрезной балке моста поперечная тяга для увеличения жесткости рулевого управления выполняется сплошной, при этом она может располагаться как перед балкой моста, так и за ней (рис. 2, а, б).
2, а, б).
В случае применения неразрезной поперечной тяги при независимой подвеске вертикальное перемещение одного из колес вызвало бы поворот другого колеса. Чтобы избежать этого, поперечную тягу делают разрезной, из нескольких звеньев (рис. 2, в).
Изменение длины поперечной тяги позволяет осуществлять регулировку схождения управляемых колес.
— по наличию усилителя – простой механический привод или с использованием усилителя.
Конструкция элементов рулевого привода должна быть достаточно жесткой для надежной и правильной передачи усилий и в тоже время позволять изменять их взаимное положение. Для обеспечения такой передачи соединение деталей рулевого привода осуществляется с помощью шаровых шарниров.
Сошка связывает выходной вал рулевого механизма с продольной тягой. Ее изготовляют методом ковки с переменным эллиптическим сечением по длине, что является наиболее рациональным для выполнения условий прочности и жесткости.
Сошку соединяют с валом шлицевым соединением треугольного профиля и фиксируют гайкой. Для беззазорной посадки отверстие в сошке и конец вала выполняют коническими, а для правильной установки сошки на валу предусмотрены соответствующие метки или несимметрично расположенные шлицы.
Продольную тягу 11 рулевого привода (рис. 3 ) делают трубчатой с утолщением по краям для монтажа шарниров. Каждый шарнир состоит из пальца 13, вкладышей 12 и 14, охватывающих сферическими поверхностями шаровую головку пальца, пружины 15 и резьбовой крышки 16.
Пружина постоянно прижимает вкладыши к шаровой головке пальца, устраняя зазоры, возникающие в результате изнашивания.
Поперечная рулевая тяга 10 также имеет трубчатое сечение. Шаровые шарниры размещаются в наконечниках 8, навинченных на концы тяги. Положение наконечников фиксируется стяжными болтами.
Наворачивая или свинчивая наконечники, можно изменять длину поперечной тяги при регулировке схождения колес. Так как резьба, нарезанная на концах тяги имеет разное направление, то изменение длины тяги можно осуществлять вращением самой тяги.
Так как резьба, нарезанная на концах тяги имеет разное направление, то изменение длины тяги можно осуществлять вращением самой тяги.
В корпусе наконечника установлен шаровой палец 5, к головке которого пружина 3 прижимает вкладыш 4, а своим вторым концом опирается на крышку 1, которая через прокладку 2 крепится болтами к корпусу наконечника.
Выход пальца из корпуса уплотняется защитной накладкой 9. Зазоры в шарнире при изнашивании устраняются путем постоянного прижатия вкладышей к шаровой головке пальца пружиной.
Такие наконечники не требуют регулировки.
Все шаровые соединения имеют пресс-масленки для периодического смазывания.
Шарнирные соединения механических рулевых приводов являются наиболее ответственными деталями с точки зрения безопасности движения. Они могут иметь пальцы сферической, полусферической или цилиндрической формы и вкладыши, изготовленные из различных материалов.
Наряду с шарнирным соединением, представленным на рис. 3, где постоянная плотность сопряжения головки шарового пальца с вкладышами поддерживается упругим воздействием пружины, действующим вдоль оси пальца, существуют шарниры с усилием вдоль оси тяги (рис. 4,а,б,в). Такие шарниры просты в изготовлении и получили распространение на грузовых автомобилях средней и большой грузоподъемности.
3, где постоянная плотность сопряжения головки шарового пальца с вкладышами поддерживается упругим воздействием пружины, действующим вдоль оси пальца, существуют шарниры с усилием вдоль оси тяги (рис. 4,а,б,в). Такие шарниры просты в изготовлении и получили распространение на грузовых автомобилях средней и большой грузоподъемности.
Однако такая конструкция имеет существенный недостаток: усилие пружины 3 должно быть значительно больше максимального усилия, которое может действовать вдоль оси тяги при движении автомобиля. Поэтому рабочие поверхности шаровых пальцев 1 и вкладышей 2 постоянно нагружены усилиями со стороны пружин. Это отрицательно сказывается на долговечности деталей.
Унифицированные шарниры неразборной конструкции (рис. 4,г,д,е) снабжены вкладышами, изготовленными из полиуретана или нейлона, пропитанного специальным составом. Наличие прорези во вкладыше обеспечивает сборку и беззазорное соединение сопряженных поверхностей с помощью пружин. Для исключения выхода пальцев из тяги при значительных деформациях или поломках пружин в шарнирах устанавливают ограничители.
Для исключения выхода пальцев из тяги при значительных деформациях или поломках пружин в шарнирах устанавливают ограничители.
Эти шарниры не требуют регулировок и смазочного материала.
Детали рулевого привода изготавливают из сталей 20, 30, 35; пальцы шарниров – из сталей 12ХН3А, 18ХГТ и 15ХН; наконечники рулевых тяг, рычаги и сошку выковывают из сталей 35, 40, 45, 30Х, 35Х, 40Х, 38ХГМ, 40ХНМА.
Диаметр рулевого колес нормирован. Он составляет для легковых и грузовых автомобилей малой грузоподъемности 380…425 мм, а для грузовых автомобилей и автобусов большой вместимости- 440…550 мм.
Максимальный угол поворота рулевого колеса зависит от типа автомобиля и находится в пределах ±540…1080˚ (1,5…3 оборота).
***
Усилители рулевого управления
Главная страница
- Страничка абитуриента
Дистанционное образование
- Группа ТО-81
- Группа М-81
- Группа ТО-71
Специальности
- Ветеринария
- Механизация сельского хозяйства
- Коммерция
- Техническое обслуживание и ремонт автотранспорта
Учебные дисциплины
- Инженерная графика
- МДК.
 01.01. «Устройство автомобилей»
01.01. «Устройство автомобилей» - Карта раздела
- Общее устройство автомобиля
- Автомобильный двигатель
- Трансмиссия автомобиля
- Рулевое управление
- Тормозная система
- Подвеска
- Колеса
- Кузов
- Электрооборудование автомобиля
- Основы теории автомобиля
- Основы технической диагностики
- Основы гидравлики и теплотехники
- Метрология и стандартизация
- Сельскохозяйственные машины
- Основы агрономии
- Перевозка опасных грузов
- Материаловедение
- Менеджмент
- Техническая механика
- Советы дипломнику
 01.01. «Устройство автомобилей»
01.01. «Устройство автомобилей»Олимпиады и тесты
- «Инженерная графика»
- «Техническая механика»
- «Двигатель и его системы»
- «Шасси автомобиля»
- «Электрооборудование автомобиля»
Назначение системы управления | Система рулевого управления
Добавлено 16. 05.2020
05.2020
|
8
страницы
|
1705
слова
|
494
просмотра
Нам доверяют более 2 миллионов пользователей,
1000+ счастливых студентов каждый день
Показаны страницы с 1 по 3 из 8 страниц Разработка подвижных фар с системой рулевого управленияМестоположение проекта: [пожалуйста, укажите название места, где проводился проект]Продолжительность проекта: от [пожалуйста, укажите] до [пожалуйста, укажите]Организация: [пожалуйста, укажите]Роль и назначение во время: Руководитель проектной группыCE 3.2 Предыстория проектаCE 3.2 .1 Характеристики проекта Этот проект был предпринят моей командой для проектирования и разработки управляемого рулевого механизма для перемещения фар автомобилей.
 Я выполнил этот проект, соединив рулевое управление с фарами автомобиля. Система освещения автомобилей не эффективна. Неэффективная система освещения приводит к нескольким дорожно-транспортным происшествиям в гористой местности и в ночное время. Я вместе с членами моей команды решил улучшить систему освещения транспортных средств, включив механизм рулевого управления. Механизм, использованный в этом проекте, представлял собой реечный рулевой механизм. Четырехколесные автомобили обычно сталкиваются с трудностями во время крутых поворотов. Этот проект был проведен для изменения направления фар в зависимости от направления рулевого управления. Я использовал адаптивные фары для этого проекта. Я помог членам моей команды вписаться в
Я выполнил этот проект, соединив рулевое управление с фарами автомобиля. Система освещения автомобилей не эффективна. Неэффективная система освещения приводит к нескольким дорожно-транспортным происшествиям в гористой местности и в ночное время. Я вместе с членами моей команды решил улучшить систему освещения транспортных средств, включив механизм рулевого управления. Механизм, использованный в этом проекте, представлял собой реечный рулевой механизм. Четырехколесные автомобили обычно сталкиваются с трудностями во время крутых поворотов. Этот проект был проведен для изменения направления фар в зависимости от направления рулевого управления. Я использовал адаптивные фары для этого проекта. Я помог членам моей команды вписаться в отражатели с обеих сторон корпуса фары. Мы использовали гидравлические связи для передачи энергии для перемещения отражателей. CE 3.2.2 Цели, разработанные для проектаОсновные цели этого проекта заключались в следующем:Разработать механизм управления фарами с рулевым управлениемУлучшить систему освещения автомобилейУлучшить движение автомобильных фар на крутых поворотахДля обеспечить транспортное средство подсветкой переднего обзора, чтобы помочь водителям правильно поворачивать на холмистой местностиуменьшить количество дорожно-транспортных происшествий из-за неэффективного освещения и сделать страну безаварийной контролировать деятельность членов проектной группы. Я должен был понять объем и цели проекта, прежде чем приступить к проектной деятельности. Мне пришлось подробно изучить механизм реечного рулевого управления для эффективного выполнения этого проекта. Я должен был объяснить механизм системы управления и провести техническое обучение членов команды проекта для обеспечения успеха проекта. Я должен был сообщать руководителю проекта о любом несоответствии между планом проекта и фактической выполненной работой. Одним из основных направлений моей работы было обнаружение любой неточности или дефекта в проекте и разработка эффективных решений для устранения недостатков. Я также должен был подготовить отчеты по проекту и презентацию в PowerPoint для этого проекта.
Я должен был понять объем и цели проекта, прежде чем приступить к проектной деятельности. Мне пришлось подробно изучить механизм реечного рулевого управления для эффективного выполнения этого проекта. Я должен был объяснить механизм системы управления и провести техническое обучение членов команды проекта для обеспечения успеха проекта. Я должен был сообщать руководителю проекта о любом несоответствии между планом проекта и фактической выполненной работой. Одним из основных направлений моей работы было обнаружение любой неточности или дефекта в проекте и разработка эффективных решений для устранения недостатков. Я также должен был подготовить отчеты по проекту и презентацию в PowerPoint для этого проекта.
CE 3.2.4 Проектная группа Рисунок 1: Люди, участвующие в проекте CE 3.2.5 Мои обязанности на протяжении всего проекта Руководитель проекта поручил мне получить представление о постановке проблемы и основных мотивах проекта. Мне пришлось исследовать рулевой механизм и различные компоненты автомобиля для соединения фар с рулевым управлением.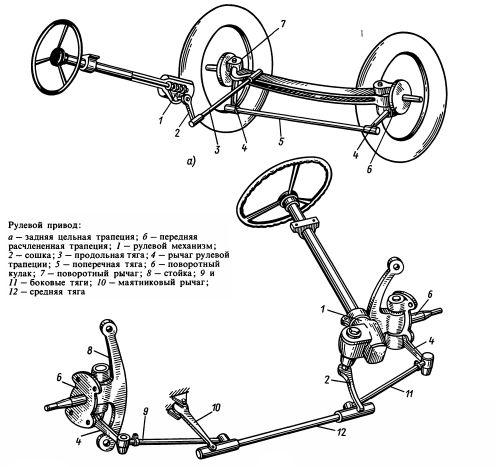 Мне пришлось разобраться в функциях реечной передачи и провести презентацию по ней для членов команды, чтобы развеять их сомнения. Пришлось определить наиболее обычную схему рулевого управления. Я отвечал за выполнение механического проектирования системы. В мои обязанности входило определение деталей, которые должны быть спроектированы, и деталей, которые необходимо купить. Я должен был обеспечить точный анализ дизайна проблемы. Одной из моих основных обязанностей было проведение математических расчетов по проектированию рамы, реечной передачи и главного шпинделя. Я отвечал за выбор двигателя. Я отвечал за обеспечение высокого качества финала
Мне пришлось разобраться в функциях реечной передачи и провести презентацию по ней для членов команды, чтобы развеять их сомнения. Пришлось определить наиболее обычную схему рулевого управления. Я отвечал за выполнение механического проектирования системы. В мои обязанности входило определение деталей, которые должны быть спроектированы, и деталей, которые необходимо купить. Я должен был обеспечить точный анализ дизайна проблемы. Одной из моих основных обязанностей было проведение математических расчетов по проектированию рамы, реечной передачи и главного шпинделя. Я отвечал за выбор двигателя. Я отвечал за обеспечение высокого качества финала
Вы читаете предварительный просмотр
Загрузите документы для загрузки
или
Станьте участником Desklib, чтобы получить доступ
Автоподвеска и рулевое управление, 5-е издание, Руководство по ремонту
Перейти к содержимому
текущий документВиртуальная коллекция AHВиртуальная коллекция AHВсе документы
Контекст
Автор: Крис Йохансон
Это руководство поможет учащемуся выполнить все задания NATEF в области A4 «Подвеска и рулевое управление», включая проверку, тестирование и диагностику систем подвески и рулевого управления; удаление и замена автономных компонентов; а также удаление, капитальный ремонт и переустановка основных компонентов. Страницы можно распечатать по запросу, или учащиеся могут выполнять свои задания онлайн, используя поля встроенной формы, а затем распечатывать или отправлять ответы по электронной почте для выставления оценок.
Страницы можно распечатать по запросу, или учащиеся могут выполнять свои задания онлайн, используя поля встроенной формы, а затем распечатывать или отправлять ответы по электронной почте для выставления оценок.
Доступ Действия с рабочей книгой , щелкнув значок «Ресурсы» в левом меню в средстве просмотра.
Содержание
- Передний вопрос
- Проект 1 Подготовка к обслуживанию автомобиля
- Работа 1 — Проведение проверок безопасности и защиты окружающей среды
- Работа 2 — Определение и интерпретация номеров транспортных средств
- Задание 3. Поиск и использование служебной информации
- Задание 4 — использование сканирующего прибора для получения диагностических кодов неисправностей
- Задание 5 — отключить и включить систему подушек безопасности
- Проект 2. Снятие и установка осей CV
- Работа 6 — Снятие, осмотр и повторная установка оси CV
- Работа 7 — Диагностика и техническое обслуживание подшипников и уплотнений полуоси CV
- Проект 3. Диагностика и обслуживание. Общие проблемы с рулевым управлением и подвеской.
- Работа 8 — Диагностика проблем с рулевым управлением и подвеской
- Работа 9 — Смажьте рулевое управление и подвеску
- Работа 10 — Обслуживание колесных подшипников
- Работа 11 — Проверка электронных систем рулевого управления и подвески
- Проект 4 Обслуживание системы рулевого управления
- Работа 12 — осмотр рулевой колонки
- Работа 13 — Обслуживание рулевой колонки
- Работа 14 — Осмотр и техническое обслуживание поворотного кулака
- Операция 15. Снятие и замена реечного рулевого механизма и внутренних наконечников поперечной рулевой тяги.
- Операция 16 — Регулировка предварительного натяга подшипника червячной передачи и люфта сектора
- Операция 17 — Удаление и замена компонентов рулевой тяги
- Задание 18. Проверка системы рулевого управления с усилителем
- Работа 19 — Обслуживание компонентов рулевого управления с усилителем
- Работа 20.
 Диагностика и обслуживание. Общие проблемы с рулевым управлением и подвеской.
Диагностика и обслуживание. Общие проблемы с рулевым управлением и подвеской.