
Ошибка
- Автомобиль — модели, марки
- Устройство автомобиля
- Ремонт и обслуживание
- Тюнинг
- Аксессуары и оборудование
- Компоненты
- Безопасность
- Физика процесса
- Новичкам в помощь
- Приглашение
- Официоз (компании)
- Пригородные маршруты
- Персоны
- Наши люди
- ТЮВ
- Эмблемы
- А
- Б
- В
- Г
- Д
- Е
- Ё
- Ж
- З
- И
- Й
- К
- Л
- М
- Н
- О
- П
- Р
- С
- Т
- У
- Ф
- Х
- Ц
- Ч
- Ш
- Щ
- Ъ
- Ы
- Ь
- Э
- Ю
- Я
Навигация
- Заглавная страница
- Сообщество
- Текущие события
- Свежие правки
- Случайная статья
- Справка
Личные инструменты
- Представиться системе
Инструменты
- Спецстраницы
Пространства имён
- Служебная страница
Просмотры
Перейти к: навигация, поиск
Запрашиваемое название страницы неправильно, пусто, либо неправильно указано межъязыковое или интервики название. Возможно, в названии используются недопустимые символы.
Возможно, в названии используются недопустимые символы.
Возврат к странице Заглавная страница.
Если Вы обнаружили ошибку или хотите дополнить статью, выделите ту часть текста статьи, которая нуждается в редакции, и нажмите Ctrl+Enter. Далее следуйте простой инструкции.
Рулевое управление автомобиля — назначение и устройство
Рулевое управление предназначено для изменения направления движения автомобиля. Обычно управляемыми являются колеса передней оси, но это преимущественно на легковых автомобилях. Иногда для улучшения управляемости автомобиля и сохранения над ним полного контроля его делают полноуправляемым, то есть управляемыми являются не только основные передние колеса – задние также имеют возможность отклоняться на определенный угол.
Рулевое управление может быть с усилителем или без него, может устанавливаться на поперечине кузова в моторном отсеке или на подрамнике (практически на всех современных автомобилях).
Устройство рулевого управления
Рисунок 8.1 Пример рулевого механизма.
1 – рулевое колесо; 2 – гайка крепления рулевого колеса; 3 – верхний кожух рулевой колонки; 4 – шестерня рулевого редуктора; 5 – фланец рулевого вала; 6 – рулевой вал; 7 – труба рулевого вала; 8 – нижний кожух рулевой колонки; 9 – шаровой шарнир; 10 – наконечник рулевой тяги; 11 – пыльник; 12 – рейка рулевого редуктора; 13 – болт крепления рулевой тяги; 14 – стопорная пластина; 15 – рулевая тяга; 16 – поворотный рычаг передней стойки.
Рулевое колесо и рулевая колонка
Садясь в автомобиль на место водителя, первое, что вы видите, — это рулевое колесо. Вращая его в ту или иную сторону, вы направляете автомобиль. Ничего в рулевом колесе (или руле) сложного нет… если это, конечно, руль автомобиля самой простой комплектации. В современных автомобилях руль — это и место для установки подушки безопасности, и пульт управления аудиосистемой вместе с телефоном, также это контроллер для управления бортовым компьютером.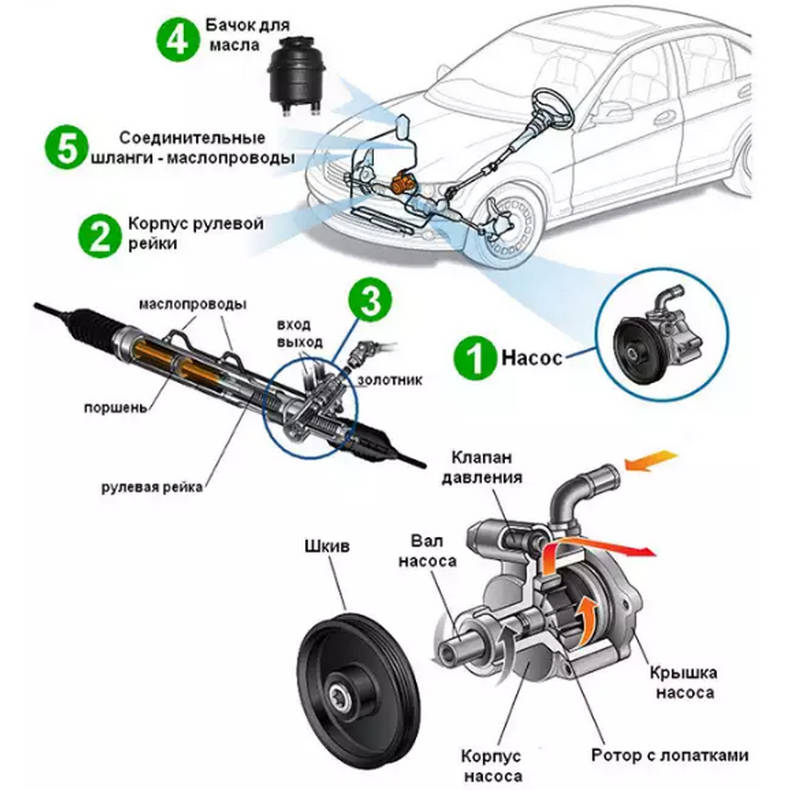
Рулевая колонка, это, по сути, два вала (реже один), соединенных между собой универсальными шарнирами (похожими на карданные). Она призвана передавать вращение от рулевого колеса к рулевому механизму. На многих нынешних автомобилях предусмотрена регулировка угла наклона рулевого колеса и расстояния его вылета. Другими словами, вы можете, перемещая рулевое колесо вверх/вниз и на себя/от себя, установить то положение, которое наиболее близко к идеальному, согласно вашим пожеланиям.
Примечание
Для обеспечения высоких показателей пассивной безопасности, к проектированию рулевой колонки относятся так же серьезно, как и, например, к проектированию сиденья. Это связано с тем, что при фронтальном столкновении рулевое колесо не должно смещаться более, чем это допустимо. Поэтому при столкновении рулевая колонка должна складываться или ломаться в определенных местах.
Рулевой механизм
На современных легковых автомобилях применяются два самых распространенных типа рулевых механизмов: червячный и реечный.
Интересно
Огромное значение имеет место расположения на подрамнике рулевого механизма относительно воображаемой оси управляемых колес. Так, установка рулевого механизма за передней осью или перед ней в итоге может кардинально изменить поведение автомобиля на дороге, поэтому конструкторы при проектировании автомобиля подходят к этому вопросу очень серьезно.
Червячный рулевой механизм
Если рулевой механизм червячный, то он состоит из глобоидного червяка и углового сектора, на который установлен ролик. К угловому сектору подсоединен вал, а на валу закреплена сошка. Перемещение сошки передается на рулевую трапецию, которая состоит из рулевых тяг. Тяги, перемещаясь, поворачивают колеса в ту или иную сторону. Устройство рулевого механизма показано на рисунке 8.2. Сейчас автомобили с червячным рулевым механизмом встречаются все реже.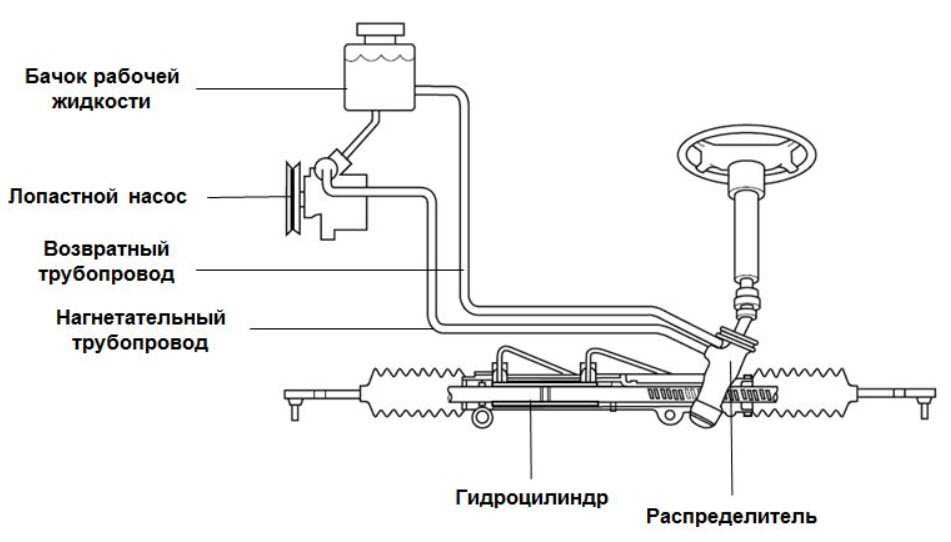
Рисунок 8.2 Червячный рулевой механизм.
Червячная передача – это такой тип передачи, в которой имеется червяк, представляющий собой резьбовую часть болта, но только с увеличенными во много раз витками, и шестерня, входящая в зацепление с этим червяком.
Глобоидным червяк называется из-за своей формы: его профиль вогнутый, как показано на рисунке 8.3.
Рисунок 8.3 Внешний вид глобоидного червяка.
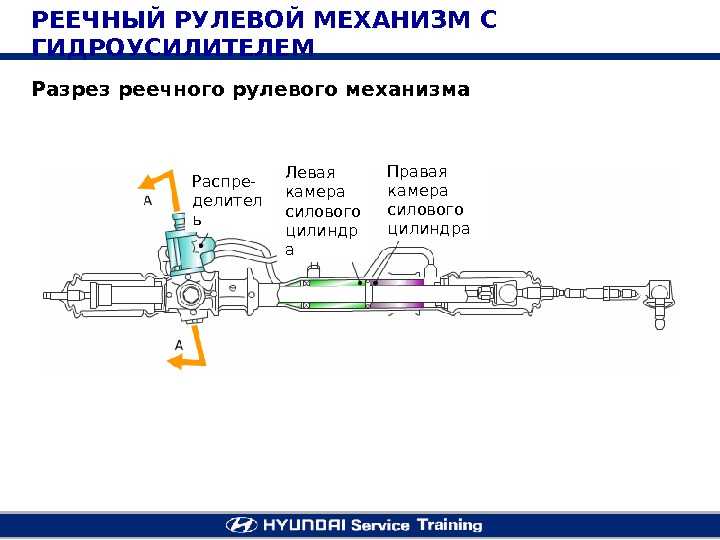
Реечный рулевой механизм
Теперь опишем реечный рулевой механизм (рисунок 8.4). Он состоит из шестерни и зубчатой рейки. Шестерня соединена с валом рулевой колонки, а рейка через тяги – с поворотными кулаками колес.
Рисунок 8.4 Реечный рулевой механизм.
Интересно
Иногда зубья на рейке наносят с переменным шагом (рисунок 8.5). Делают это для того, чтобы получить подобие активного рулевого управления для получения сочетания таких противоречивых показателей, как управляемость и комфорт. Так, для того чтобы при парковке водитель не вращал рулевое колесо на 5—10 оборотов в угоду легкости, желательно, чтобы число оборотов от упора до упора составляло как можно меньше – один, а то и пол-оборота.
Рисунок 8.5 Пример зубчатой рейки рулевого механизма с переменным шагом зубьев.
Примечание
Шаг зубьев – это расстояние между центрами вершин зубьев.
Интересно
Кстати, может быть и обратная ситуация, когда шаг зубьев рейки уменьшается ближе к концам рейки.
Реечный рулевой механизм занял место червячного и основательно закрепился как наиболее актуальная конструкция, так как его преимущества говорят сами за себя: управление автомобилем, даже не оборудованным усилителем рулевого управления, несложное, небольшое количество звеньев всего рулевого механизма, простота монтажа на автомобиль и сведение к минимуму операций по обслуживанию.
Рулевой привод
Рулевой привод — это набор тяг и шарниров, связывающих и передающих перемещения от рулевого механизма к поворотным кулакам управляемых колес.
Если вернуться к червячному рулевому механизму, то в классической схеме имеются три тяги — одна центральная и две боковые, они соединяются через шарниры. Тяги рулевого привода в данном случае называют рулевой трапецией. Конструкция рулевой трапеции в геометрическом плане такова, что она обеспечивает поворот управляемых колес на разные углы (смотрите главу «Ходовая часть»).
При условии установки реечного рулевого механизма все немного проще. К рулевой рейке крепятся рулевые тяги с обеих сторон, которые передают перемещение на поворотные кулаки колес. Преимущества очевидны, ведь чем меньше различных промежуточных звеньев, тем надежнее и точнее весь механизм.
Примечание
Чтобы исключить попадание грязи и пыли в корпус реечного рулевого механизма, с обеих его сторон установлены так называемые пыльники (гофрированные резиновые чехлы).
Углы поворота управляемых колес
При повороте управляемые колеса автомобиля проходят различные расстояния. И если оба колеса будут поворачиваться на одинаковый угол, автомобиль будет смещаться с заданной траектории, при этом шины колес будут значительно быстрее изнашиваться.
Рисунок 8.6 Поворот управляемых колес на разные углы.
Для того чтобы избежать этого, рулевое управление проектируют таким образом, чтобы обеспечить поворот внутреннего колеса на больший угол относительно наружного.
Рисунок 8.7 Поворот управляемых колес на различные углы.
Глава 8. Рулевое управление | Аэродинамика автомобиля Общие сведения о электрооборудовании автомобиля | Подраздел 8.2 Назначение и типы усилителей рулевого управления |
Please enable JavaScript to view the comments powered by Disqus. comments powered by Disqus
Понимание рулевого управления на кораблях
Мы все знакомы с использованием руля, который помогает поворачивать корабль по мере необходимости.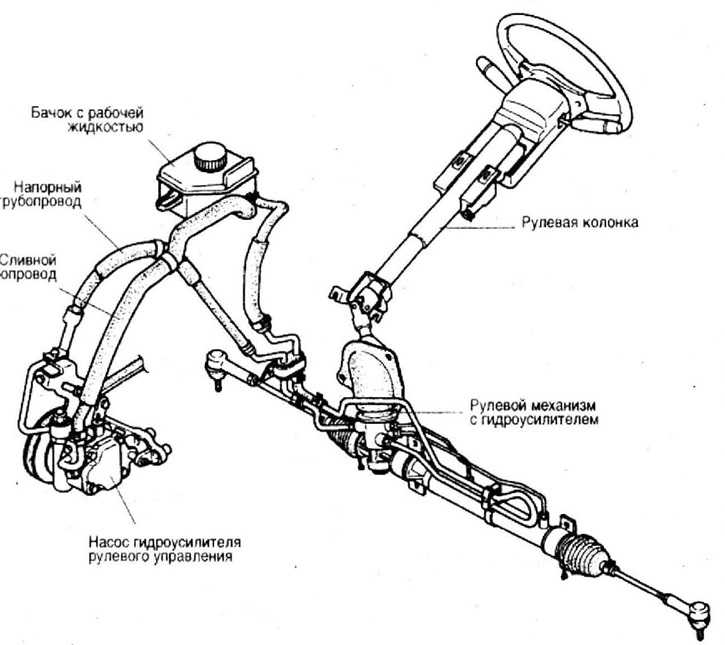 Рули являются основной системой для всего движения и управления кораблями. Но мы не должны забывать, что все действие руля зависит от другой центральной системы, которая называется Рулевой механизм .
Рули являются основной системой для всего движения и управления кораблями. Но мы не должны забывать, что все действие руля зависит от другой центральной системы, которая называется Рулевой механизм .
Рулевое устройство, объединенное с системой руля, определяет полный «механизм поворота», обязательный для каждого судна, независимо от его размера, типа и режима работы.
Система рулевого управления была неотъемлемой частью корабельной техники с момента появления первых кораблей, которые управлялись вручную.
Рисунок 1: Ручной штурвал на штурвале для старых судов
Система рулевого управления на корабле
Эффективность работы рулевого привода зависит от некоторых основных аспектов. Эти основные требования, которым должны неизменно соответствовать все рулевые механизмы, руководствуются правилами, установленными классификационными обществами. Кратко их можно обозначить следующим образом:
- В соответствии со стандартными требованиями, рулевой механизм должен быть способен управлять судном от 35 градусов левого борта до 35 градусов правого борта и наоборот, при этом судно должно двигаться вперед с постоянной скоростью лобового при максимальной продолжительной номинальной частоте вращения вала.
 и летняя грузовая ватерлиния в течение максимум 28 секунд
и летняя грузовая ватерлиния в течение максимум 28 секунд - При неработающем одном из силовых агрегатов руль должен иметь возможность поворачиваться на 15 градусов левого борта на 15 градусов правого борта (и наоборот) в течение 1 минуты при движении судна со скоростью, равной половине его номинальной максимальной скорости 7 узлов ( в зависимости от того, что больше) по летней грузовой марке
- Основные энергоблоки и системы управления должны быть продублированы, чтобы в случае отказа одного из них другой мог легко заменить их в качестве резервного
 и летняя грузовая ватерлиния в течение максимум 28 секунд
и летняя грузовая ватерлиния в течение максимум 28 секунд- Аварийный источник питания: Система рулевого привода должна быть снабжена дополнительным силовым агрегатом (гидравлическим насосом и т.п.), подключенным к аварийному источнику питания от аварийного генератора, который должен иметь возможность поворота руля от 15 градусов от одного борта на другой борт в течение 60 секунд при движении судна с максимальной эксплуатационной скоростью или 7 узлов, в зависимости от того, что больше
Поскольку корабли продолжали увеличиваться в размерах и становились быстрее, были внедрены современные системы, облегчающие работу человека.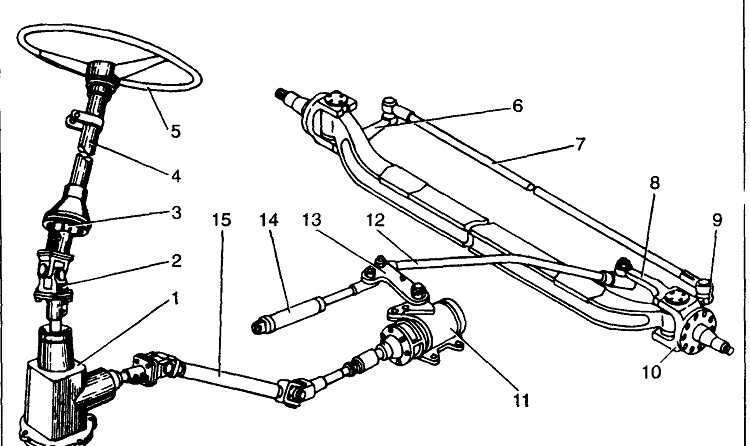 В основном существует два типа широко используемых систем рулевого управления:
В основном существует два типа широко используемых систем рулевого управления:
- Гидравлический
- Электрогидравлический тип
Несмотря на то, что система претерпела значительные изменения, основная физика работы осталась прежней.
Рисунок 2: Современные усовершенствованные рулевые управления у руля
Основное управление рулевыми операциями осуществляется с штурвала любого корабля, аналогично автомобилю, где весь контроль над «управляемостью» транспортного средства возлагается на рулевое колесо водителя. «Управляющая сила» для поворота срабатывает от штурвала у штурвала, который достигает системы рулевого управления.
Система рулевого управления создает крутящую силу в определенном масштабе, которая затем, в свою очередь, передается на баллер руля, который поворачивает руль направления. Промежуточные системы рулевого управления современного корабля могут быть разнообразными, и каждый небольшой компонент имеет свою уникальную функцию. Мы опускаем подробное обсуждение каждого такого компонента.
Мы опускаем подробное обсуждение каждого такого компонента.
На следующем рисунке показана точная последовательность действий в простой системе руля.
Рисунок 4: Типовое изображение рулевого механизма на кораблеСистема руля состоит из следующих элементов:
- Приводы руля
- Блоки питания
- Прочее вспомогательное оборудование, необходимое для поворота руля за счет приложения крутящего момента
- Гидравлические насосы и клапаны
В гидравлических и электрогидравлических системах гидравлическое давление создается гидравлическими насосами, которые в основном приводятся в действие электродвигателями (электрогидравлические системы) или иногда чисто механическими средствами (гидравлические системы).
Однако в настоящее время на судах преобладают в основном передовые электрогидравлические системы. Эти гидравлические насосы играют решающую роль в создании необходимого давления для создания движений в рулевом механизме, которые могут вызвать необходимые вращательные моменты в системе руля.
Эти насосы в основном бывают двух основных типов:
- Радиально-поршневого типа (Hele-Shaw)
- Аксиально-поршневого типа (перекосная шайба)
Приводы обеспечивают координацию между создаваемым гидравлическим давлением насосов (конечно, с электрическим приводом) и баллером руля путем преобразования его в механическую силу, создающую вращающий момент для руля. Приводы в настоящее время в основном приводятся в действие электрическими силовыми агрегатами.
Эти приводы, в свою очередь, могут быть двух типов:
- Поршневое или цилиндрическое исполнение
- Лопастной ротор
Типы приводных систем отображают типы рулевых приводов, имеющихся на судах, которые также соответственно подразделяются на плунжерные и поворотно-лопастные.
Давайте обсудим их вкратце.
Рулевой механизм поршневого типа
Рулевой механизм поршневого типа является одной из наиболее часто используемых конструкций рулевого механизма и довольно дорог в конструкции. Основной принцип такой же, как у двигателя с гидравлическим приводом или подъемника.
Основной принцип такой же, как у двигателя с гидравлическим приводом или подъемника.
К двум рычагам приводного диска с обеих сторон прикреплены четыре гидравлических цилиндра. Эти цилиндры напрямую связаны с гидравлическими насосами с электрическим приводом, которые создают гидравлическое давление через трубы.
Это поле гидравлического давления, присутствующее в насосах, передает движение гидравлическим цилиндрам, что, в свою очередь, соответствует приводу, воздействующему на баллер руля. Как известно, баллер руля является неотъемлемой частью всей рулевой системы судов и диктует точное поведение отклика руля.
Направление поворота руля определяется работой гидравлического насоса. Физику его функции можно лучше объяснить с помощью следующего рисунка.
Рис. 5: Рулевой механизм поршневого типа Здесь цилиндры, обозначенные A и C, соединены с напорной стороной насоса. Это создает положительное давление в поршневых цилиндрах. Напротив, два других цилиндра B и D соединены со стороной всасывания насоса.
Создает отрицательное давление в цилиндрах. Результирующие силы создают вращающий момент на руле направления по часовой стрелке. Проще говоря, положительное и отрицательное давление от насосов создает боковые силы на гидроцилиндрах, которые создают пару для поворота баллера руля.
Аналогичным образом, если повернуть против часовой стрелки, выполняется обратное, а именно. нагнетательные концы насосов подключены к цилиндрам B и D, а сторона всасывания насосов — к A и C. Этот обратный поток давления от гидравлических насосов достигается с помощью регулирующих клапанов, управляемых из рулевой рубки.
Рулевой механизм поршневого типа обеспечивает значительное значение крутящего момента при заданной приложенной мощности. Давление гидравлического масла варьируется от от 100 бар до 175 бар с в зависимости от размера руля и требуемого крутящего момента.
Роторно-лопастной рулевой механизм Вращательно-лопастной рулевой механизм имеет неподвижный корпус, в котором вращаются два лопасти. Корпус вместе с лопатками образуют четыре камеры. Физика его работы аналогична таранному типу с небольшой разницей.
Корпус вместе с лопатками образуют четыре камеры. Физика его работы аналогична таранному типу с небольшой разницей.
Когда камеры A и C находятся под давлением, лопатки вращаются против часовой стрелки. A и C подключены к стороне нагнетания насоса, а камеры B и D подключены к стороне всасывания насоса.
Аналогичным образом, когда требуется вращение по часовой стрелке, B и D подключаются к стороне нагнетания насоса, а A и C подключаются к стороне всасывания насоса. Как и выше, это также управляется специальными регулирующими клапанами.
Таким образом, перепад давления в камерах вызывает вращательные моменты в крыльчатке.
Вращающаяся пластинчатая конструкция используется, когда требуется давление от 60 до 100 бар для создания требуемого крутящего момента. Это основное преимущество рулевого механизма поворотно-лопастного типа, требующего меньшего гидравлического давления и, следовательно, мощности для создания того же крутящего момента, что и рулевой механизм поршневого типа.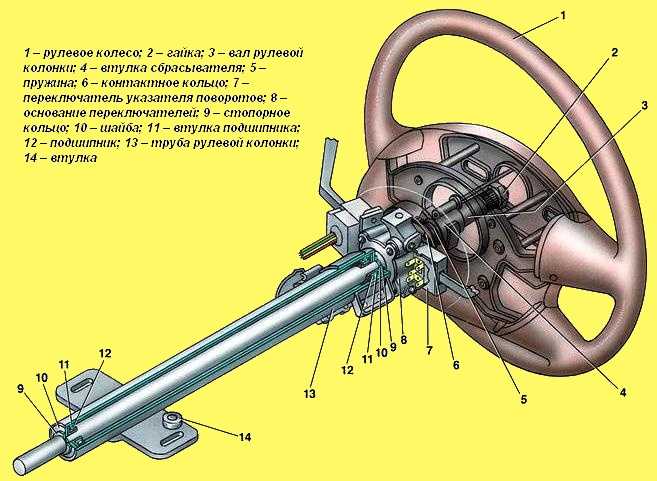
Имеются 3 неподвижных и 3 подвижных лопасти, которые могут создавать углы поворота руля до 70 градусов, т.е. 35 градусов с каждой стороны.
Такое расположение имеет ряд других преимуществ, таких как более низкая стоимость установки, меньший вес и меньшая занимаемая площадь.
Неподвижные и вращающиеся лопасти изготовлены из чугуна с шаровидным графитом. Во вращающихся лопастях часто предусмотрены шпонки для надлежащей прочности и ориентации.
Дополнительное чтение:
8 Общие проблемы, встречающиеся в системе рулевого управления судов
Процедура проверки рулевого механизма
Процедура запуска аварийного рулевого механизма
Отказ от ответственности: Мнения авторов, выраженные в этой статье, не обязательно отражают точку зрения Marine Insight. Данные и диаграммы, если они используются в статье, были получены из доступной информации и не были подтверждены каким-либо установленным законом органом. Автор и компания Marine Insight не претендуют на точность и не несут за это никакой ответственности. Взгляды представляют собой только мнения и не представляют собой каких-либо руководящих указаний или рекомендаций относительно какого-либо курса действий, которым должен следовать читатель.
Автор и компания Marine Insight не претендуют на точность и не несут за это никакой ответственности. Взгляды представляют собой только мнения и не представляют собой каких-либо руководящих указаний или рекомендаций относительно какого-либо курса действий, которым должен следовать читатель.
Статья или изображения не могут быть воспроизведены, скопированы, переданы или использованы в любой форме без разрешения автора и Marine Insight.
Похожие посты
Об авторе
Субходип окончил факультет морской архитектуры и морской инженерии. Интересуясь тонкостями морских сооружений и аспектами целевого проектирования, он посвятил себя обмену и распространению общих технических знаний в этом секторе, который в данный момент требует поворота, чтобы вернуться к своей былой славе.
AutoInfoMe: Автомобильное рулевое управление
3.1 Введение
Автомобиль был изобретен более 100 лет назад. Как
важная часть автомобиля, автомобильная система рулевого управления была создана с
эволюция автомобиля в конфигурации, функциях и внешнем виде. Рулевое управление
системы в основном представляет собой механическую связь или механизм, с помощью которого водитель может
контролирует и управляет движением или направлением движения автомобиля. Вместе с
разработка самой автомобильной техники и производительности, автомобильное рулевое управление
система нуждается в инновациях за счет увеличения динамизации и управляемости системы
шаг за шагом. Чтобы адаптироваться к мутативной среде, необходимо
точка для системы рулевого управления, как повысить ее гибкость и изменчивость.
Как
важная часть автомобиля, автомобильная система рулевого управления была создана с
эволюция автомобиля в конфигурации, функциях и внешнем виде. Рулевое управление
системы в основном представляет собой механическую связь или механизм, с помощью которого водитель может
контролирует и управляет движением или направлением движения автомобиля. Вместе с
разработка самой автомобильной техники и производительности, автомобильное рулевое управление
система нуждается в инновациях за счет увеличения динамизации и управляемости системы
шаг за шагом. Чтобы адаптироваться к мутативной среде, необходимо
точка для системы рулевого управления, как повысить ее гибкость и изменчивость.
Раньше, когда автомобили были просто
изобрели, водитель поворачивал ручку или рельс с рулевым валом в его
рука для вождения. Рулевой механизм автомобиля был шестеренчато-рейочным.
самый ранний предок автомобильного рулевого механизма. Передаточное отношение рулевого механизма
было 1 к 1. Для движения требовалось много энергии.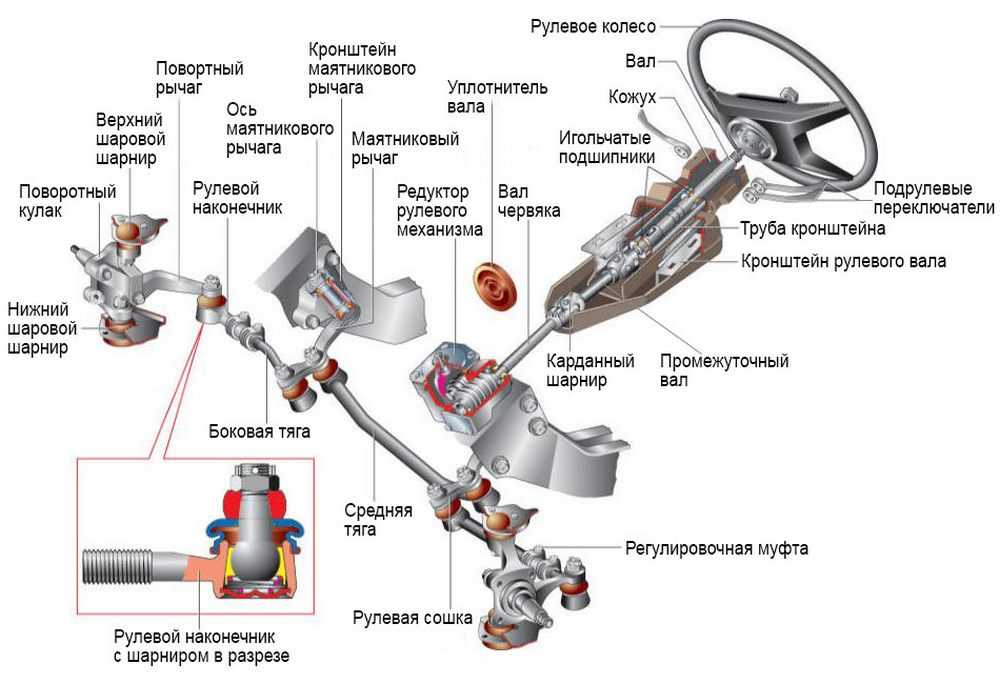 Когда автомобильный предварительно положительный двигатель
были разработаны в 1891 году, был увеличен вес головы автомобиля,
таким образом, вибрация системы рулевого управления может передаваться водителю при повороте рукоятки.
или рельс, и это заставляло водителя чувствовать себя слишком усталым. Как одношарнирный механизм,
исходную ручку или рейку с рулевым валом следует усовершенствовать, а ее
гибкость должна быть увеличена, чтобы избежать недостатка. В ранние времена,
системы ручки или рельса с рулевым валом все просты, и они только
имеют функцию поворота вправо или влево. Позже рулевое колесо было применено в
автомобили. После 1990, функции рулевого колеса имеют тенденцию к диверсификации.
Некоторые дополнительные функции добавляются там, где преимущество многофункционального
руль заключается в том, что водителям не нужно перемещаться в таком большом пространстве, и они могут
удобно управлять автомобилем для многих функций. Из ручки или рельса
система рулевого управления до многофункционального рулевого колеса, а затем развивается до
концептуальная система без рулевого колеса, это правильный процесс от простого
систему в сложную систему, а затем в простую систему.
Когда автомобильный предварительно положительный двигатель
были разработаны в 1891 году, был увеличен вес головы автомобиля,
таким образом, вибрация системы рулевого управления может передаваться водителю при повороте рукоятки.
или рельс, и это заставляло водителя чувствовать себя слишком усталым. Как одношарнирный механизм,
исходную ручку или рейку с рулевым валом следует усовершенствовать, а ее
гибкость должна быть увеличена, чтобы избежать недостатка. В ранние времена,
системы ручки или рельса с рулевым валом все просты, и они только
имеют функцию поворота вправо или влево. Позже рулевое колесо было применено в
автомобили. После 1990, функции рулевого колеса имеют тенденцию к диверсификации.
Некоторые дополнительные функции добавляются там, где преимущество многофункционального
руль заключается в том, что водителям не нужно перемещаться в таком большом пространстве, и они могут
удобно управлять автомобилем для многих функций. Из ручки или рельса
система рулевого управления до многофункционального рулевого колеса, а затем развивается до
концептуальная система без рулевого колеса, это правильный процесс от простого
систему в сложную систему, а затем в простую систему.
3.2 Функции системы рулевого управления:
Функции рулевой системы: позволять качание колес влево или вправо для поворота автомобиля по желанию водитель (позволить водителю вести транспортное средство). Он преобразует вращательное движение руля в угловой поворот передних колес. Это обеспечивает курсовая устойчивость с помощью правильной геометрии рулевого управления. Это помогает минимизируйте износ шин, обеспечивая надлежащий контакт с дорогой. Оптимизирует срок службы шин также. Он умножает усилия водителя, выступая в качестве рычага, чтобы достаточно легко крутить колеса. Это помогает в достижении эгоцентризма усилия по поддержанию правильных рулевых механизмов. Он поглощает большую часть дорожные удары, тем самым предотвращая их передачу в руки водитель без особой нагрузки на него.
3.3 Требования к системе рулевого управления:
1. Правильно
разработанная система рулевого управления, работает хорошо и направляет транспортное средство в правильном направлении
направление.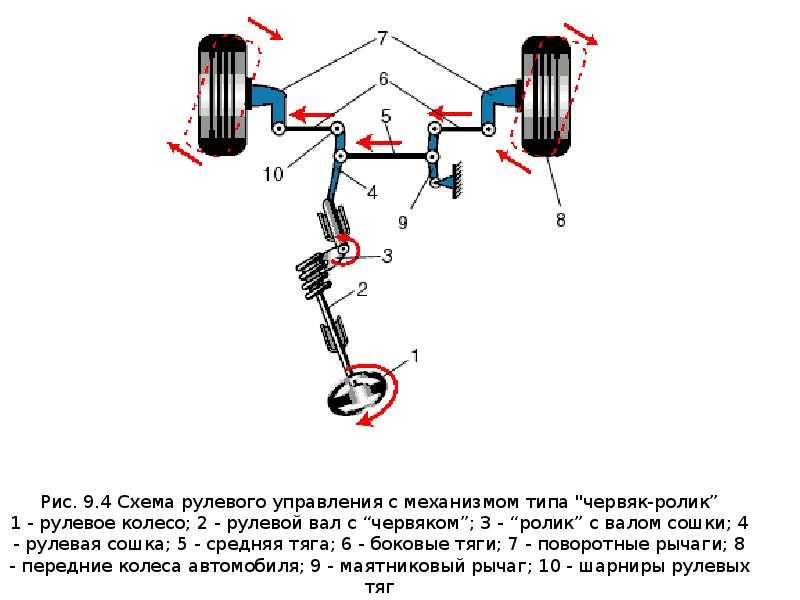
2. Это
должно удовлетворять условию Аккермана.
3. Когда
рулевое колесо отпущено, колеса должны автоматически вернуться в исходное положение.
прямолинейном положении и должен оставаться устойчивым в этом положении.
4.
рулевое управление должно иметь как можно более низкое передаточное число, чтобы обеспечить легкость управления.
умение обращаться.
Рулевое управление
механизм должен быть очень точным, простым в установке и обращении или
усилия должны быть минимальными, чтобы управлять.
5. Это
должна обеспечивать максимальную курсовую устойчивость автомобиля. Дорога потрясает
колеса не передаются в руки водителя; он должен поглощать дорожные толчки.
6. Это
должен постоянно держать колесо в движении, не натирая его.
дорога.
7. Эта система должна ассоциироваться с контролем скорости.
8. Это
должен быть легким и стабильным. Он должен легко эксплуатироваться с меньшими затратами на техническое обслуживание.
9. Это
должен иметь самоцентрирующееся действие в некоторой степени.
10.
на систему рулевого управления не должны воздействовать боковые тяги, силы на поворотах и
эффекты ветра.
11. Хороший рулевой механизм должен быть сконструирован таким образом, чтобы он не допускал бокового проскальзывания передних колес при управлении.
12. Во время руления должно быть истинное качение колес. Передние колеса должны позволять поворачиваться влево и вправо для управления транспортным средством.
13. Должна быть определенная степень необратимости, чтобы
удары дорожного покрытия не передаются на руки водителя.
3.4 Принцип правильного рулевого управления:
Автомобильный рулевой механизм на основе «Акермана».
Принцип рулевого управления», в то время как «Принцип правильного рулевого управления» является
основу этой связи. В механизме состоит из поперечной связи, соединенной
на короткие оси и передние колеса через короткие рычаги. Они образуют коленчатый рычаг
рычаг. При прямолинейном движении автомобиля поперечина остается параллельной
короткие звенья оба составляют угол α от горизонтальной оси шасси.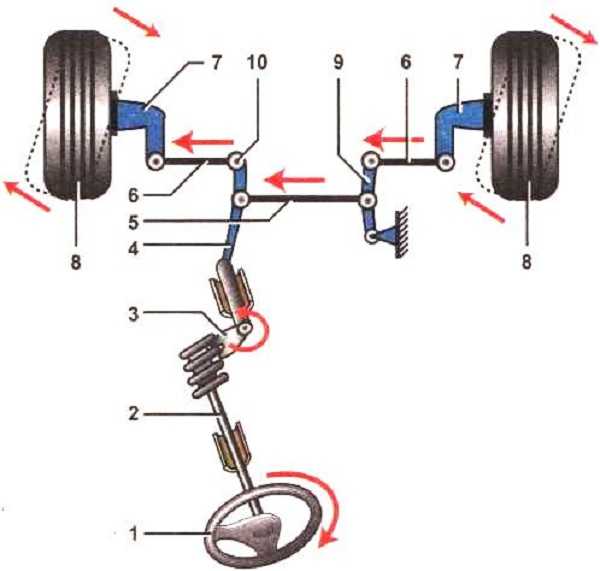 Этот
система обеспечивает изменение направления движения автомобиля и
поддерживать положение по решению водителя, не напрягая его.
Элегантный и простой механизм, приближенный к идеальному рулевому управлению, был запатентован в Англии в 1818 году Рудольфом Акерманом, и хотя он назван в его честь,
Фактическим изобретателем был немецкий каретный строитель по имени Георг Ланкенспергер, который
разработал его двумя годами ранее.
Этот
система обеспечивает изменение направления движения автомобиля и
поддерживать положение по решению водителя, не напрягая его.
Элегантный и простой механизм, приближенный к идеальному рулевому управлению, был запатентован в Англии в 1818 году Рудольфом Акерманом, и хотя он назван в его честь,
Фактическим изобретателем был немецкий каретный строитель по имени Георг Ланкенспергер, который
разработал его двумя годами ранее.
Правильное рулевое управление достигается, когда все
четыре колеса отлично катятся при любых условиях эксплуатации. Принимая
витков (рис. 3.1) условие идеальной прокатки выполняется, если оси
передние колеса при изготовлении встречаются с осью заднего колеса в одной точке. Тогда эта точка
— мгновенный центр (I) геометрии рулевого управления. Видно, что
внутреннее колесо должно повернуться на больший угол, чем внешнее колесо.
Чем больше угол поворота, тем меньше радиус поворота. Однако есть
максимум, на который мы можем пойти в отношении угла поворота рулевого колеса. Это было найдено
что угол поворота (внутреннего колеса) может иметь максимальное значение около
44º. Крайние положения с обеих сторон называются положениями блокировки.
диаметр наименьшего круга, который может пройти внешнее переднее колесо автомобиля
и получается, когда колеса находятся в крайнем положении, называется
поворотный круг.
Это было найдено
что угол поворота (внутреннего колеса) может иметь максимальное значение около
44º. Крайние положения с обеих сторон называются положениями блокировки.
диаметр наименьшего круга, который может пройти внешнее переднее колесо автомобиля
и получается, когда колеса находятся в крайнем положении, называется
поворотный круг.
Рис. 3.1: Принцип правильного рулевого управления |
Для правильного рулевого управления,
cot φ = y+c / b, (φ=угол внутренней
замок)
= y/b + c/b
= cotθ + c/b, (θ= угол внешнего замка)
cot φ ₋ cotθ = с/б …. (уравнение правильное рулевое управление).
Вышеупомянутое уравнение представляет основное условие для
рулевой механизм для идеального качения всех колес.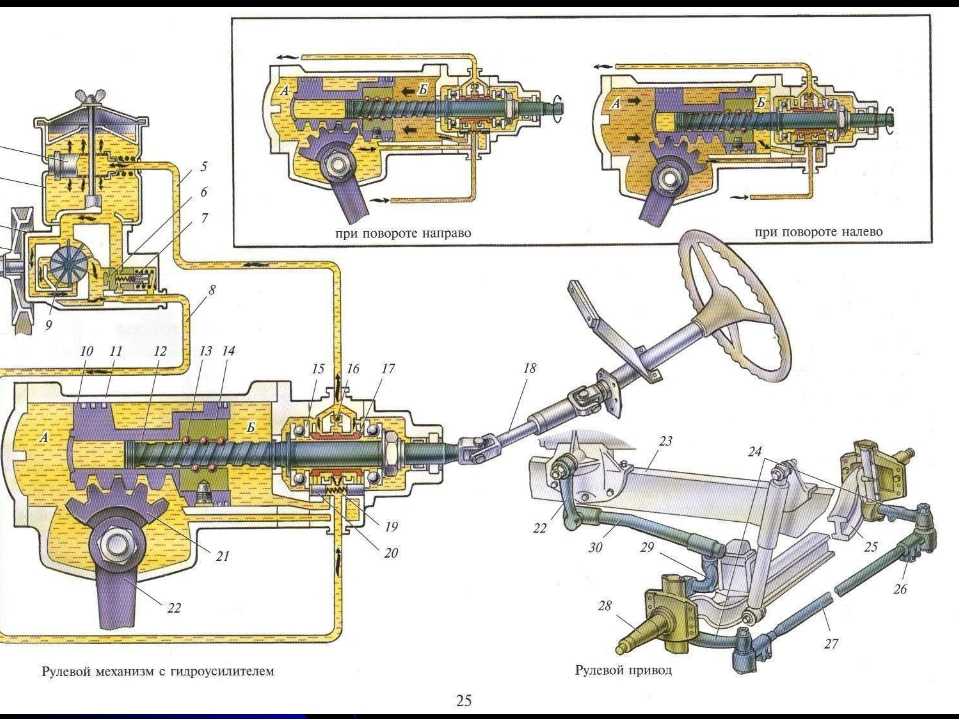
Условием правильного рулевого управления является то, что все
четыре колеса должны вращаться вокруг одного и того же мгновенного центра I, лежащего на
оси задних колес. Ось внутренних колес составляет больший угол θ
чем угол φ, образуемый осью внешнего колеса; это «принцип
механизма правильного рулевого управления». И этот принцип следует гораздо более известному «принципу Аккермана».
Управляемая геометрия». Термин «геометрия рулевого управления» (также известный как «передняя часть
геометрия») относится к угловому соотношению между подвеской и рулевым управлением.
детали, передние колеса и дорожное покрытие. Поскольку выравнивание имеет дело с углами
и влияет на рулевое управление, метод описания измерений центровки называется
геометрия руля. Существует пять углов геометрии рулевого управления: развал, кастер.
,Схождение, Наклон оси рулевого управления и Схождение на поворотах. Намерение Аккермана
геометрия заключается в том, чтобы избежать необходимости бокового скольжения шин при следовании по
путь вокруг кривой.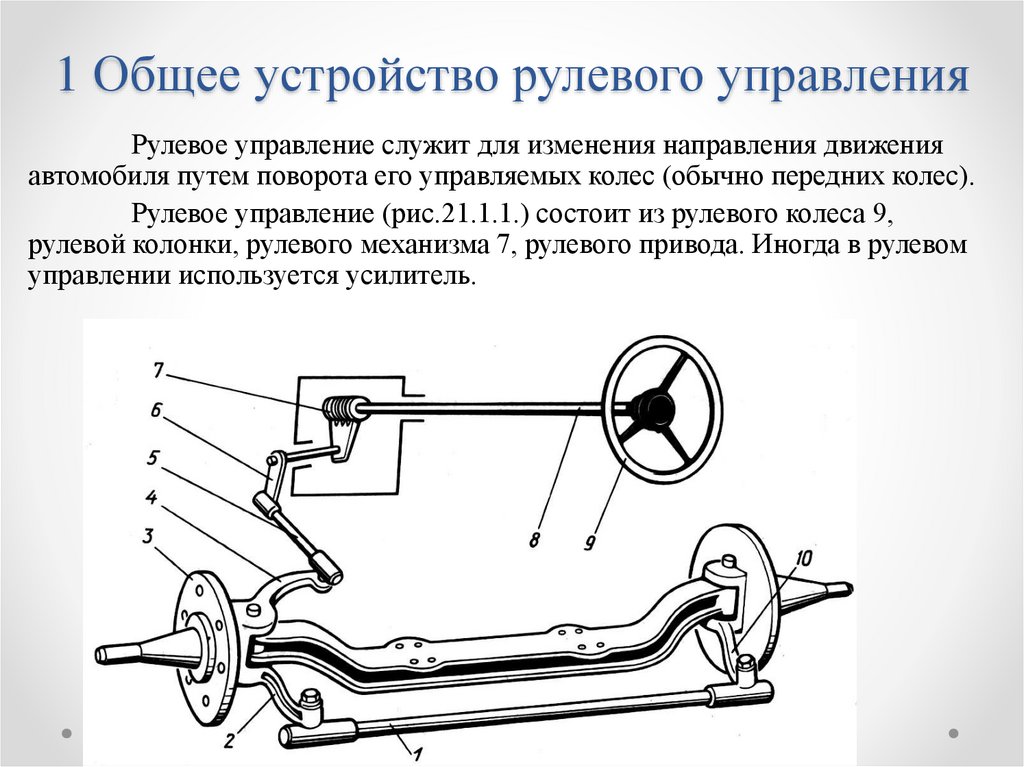 И за тем же кривым путем оба задних колеса также
вращаться с немного отличающейся скоростью друг от друга, чтобы удовлетворить правильное
состояние рулевого управления, чтобы принцип Аккермана работал идеально.
переход задних колес и их регулирование поддерживаются
«дифференциальная единица», которая играет жизненно важную, но скрытую роль в правильном
рулевой механизм. И поэтому это самый скрытый компонент для рулевого управления
геометрия из системы главной передачи. Линия траектории кривой передних колес и
центральная линия осей задних колес всегда пересекается в одной общей точке, называемой «I».
(мгновенный центр), и это
возможно только при правильном функционировании рулевого управления и дифференциала.
И за тем же кривым путем оба задних колеса также
вращаться с немного отличающейся скоростью друг от друга, чтобы удовлетворить правильное
состояние рулевого управления, чтобы принцип Аккермана работал идеально.
переход задних колес и их регулирование поддерживаются
«дифференциальная единица», которая играет жизненно важную, но скрытую роль в правильном
рулевой механизм. И поэтому это самый скрытый компонент для рулевого управления
геометрия из системы главной передачи. Линия траектории кривой передних колес и
центральная линия осей задних колес всегда пересекается в одной общей точке, называемой «I».
(мгновенный центр), и это
возможно только при правильном функционировании рулевого управления и дифференциала.
3.5 Общее расположение системы рулевого управления:
В эволюции автомобильной системы рулевого управления два
в первую очередь применяется привод замещающего вала передних колес; рулевая рейка
конструкция зубчатой передачи стала теоретизироваться позже, и она была точно обработана, таким образом
Шестеренчато-реечный рулевой механизм применяется в автомобилях формально.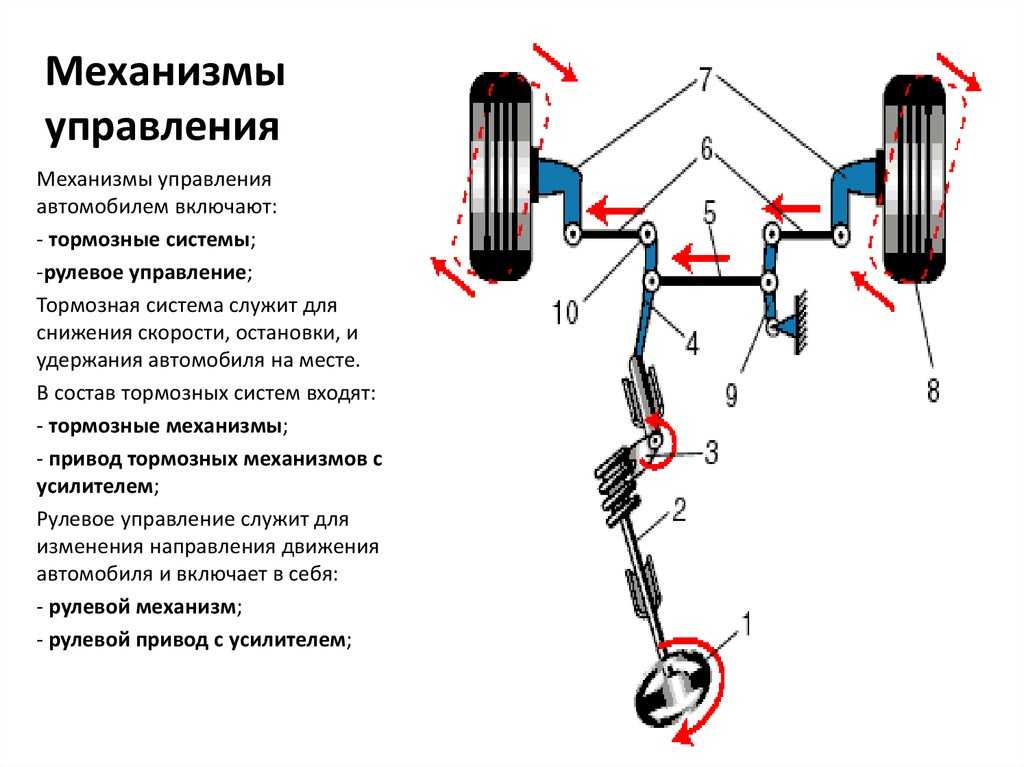 С
автомобильная техника совершенствуется, автомобильная система рулевого управления также
быстро развивались. Там была тяга, которая соединяла навесное оборудование
рулевой вал друг к другу. Специальная рулевая рейка управляла рулевой тягой.
двигаясь вправо и влево, и заставляли внутреннее и внешнее колеса вращаться.
Механизм с шестеренчатым редуктором сделал автомобильную систему более гибкой к
контроль и изолированная вибрация. Ручка и рейка заменены на круглые
руль. А круговой руль с рулевым валом переместился на
справа или слева. Прежняя вертикальная фиксация превратилась в градиентную фиксацию.
как для руля, так и для рулевого вала.
С
автомобильная техника совершенствуется, автомобильная система рулевого управления также
быстро развивались. Там была тяга, которая соединяла навесное оборудование
рулевой вал друг к другу. Специальная рулевая рейка управляла рулевой тягой.
двигаясь вправо и влево, и заставляли внутреннее и внешнее колеса вращаться.
Механизм с шестеренчатым редуктором сделал автомобильную систему более гибкой к
контроль и изолированная вибрация. Ручка и рейка заменены на круглые
руль. А круговой руль с рулевым валом переместился на
справа или слева. Прежняя вертикальная фиксация превратилась в градиентную фиксацию.
как для руля, так и для рулевого вала.
В любом автомобиле рулевое управление является основным компонентом. В основном
рулевое управление связано с передними осями с помощью зубчатого механизма. На передней
ось, установлены колеса, а с помощью руля водитель может
поворачивайте автомобиль вправо, влево или прямо. Общее расположение
автомобильной рулевой системы – это рулевое колесо, рулевая колонка и ее
вал, рулевой редуктор и рулевые тяги. И это было показано в
Рисунок 3.2.
Рис 3.2 Общее устройство рулевого управления автомобиля |
1.
Рулевое колесо: Колесо, поворачиваемое водителем автомобиль, корабль и т. д., когда он или она хочет изменить направление движения транспортное средство. В ранние времена существовало два вида появления автомобилей. механизм управления. Они представляли собой простую ручку и две перекрещенные рейки. Идеи исходил от штурвала парохода. После 1986 года появление механизм управления автомобилем был в основном доработан под руль.
2.
Рулевая колонка и вал:
Вал, соединяющий рулевое колесо с
рулевой механизм в сборе. Его также называют рулевым валом, в совокупности называемым
система рулевого управления, рулевая колонка и вал соединяют рулевое колесо
к остальной части системы рулевого управления, расположенной рядом с колесами или в них. Самый современный
Автомобили поставляются с телескопическим рулевым валом, состоящим из двух стальных труб, одна из которых
который твердый, а другой полый. Твердая трубка скользит внутри полой
трубка, позволяющая ей разрушиться в случае столкновения. Рулевой вал
также имеет рулевую муфту, расположенную внизу, которая служит для поглощения
вибрации, а также допуская небольшие отклонения, происходящие в выравнивании
между рулевым механизмом и валом. Многим современным автомобилям не хватает клиренса
для облегчения прямого соединения рулевого вала и шестерни. Это
наклоняемая колонна для движения вперед и назад полностью регулируется, чтобы сделать вождение
намного удобнее.
Самый современный
Автомобили поставляются с телескопическим рулевым валом, состоящим из двух стальных труб, одна из которых
который твердый, а другой полый. Твердая трубка скользит внутри полой
трубка, позволяющая ей разрушиться в случае столкновения. Рулевой вал
также имеет рулевую муфту, расположенную внизу, которая служит для поглощения
вибрации, а также допуская небольшие отклонения, происходящие в выравнивании
между рулевым механизмом и валом. Многим современным автомобилям не хватает клиренса
для облегчения прямого соединения рулевого вала и шестерни. Это
наклоняемая колонна для движения вперед и назад полностью регулируется, чтобы сделать вождение
намного удобнее.
3.
Рулевой механизм: Шестерня установлена на нижнем конце рулевой колонки, которые используются для увеличения силы поворота водителя. Это преобразует вращательное движение руля в прямолинейное движение.
4.