Рулевое управление Ваз-2107 — Автолюбители
Написал admin, дата , раздел Устройство Ваз 2107,
Рулевое управление
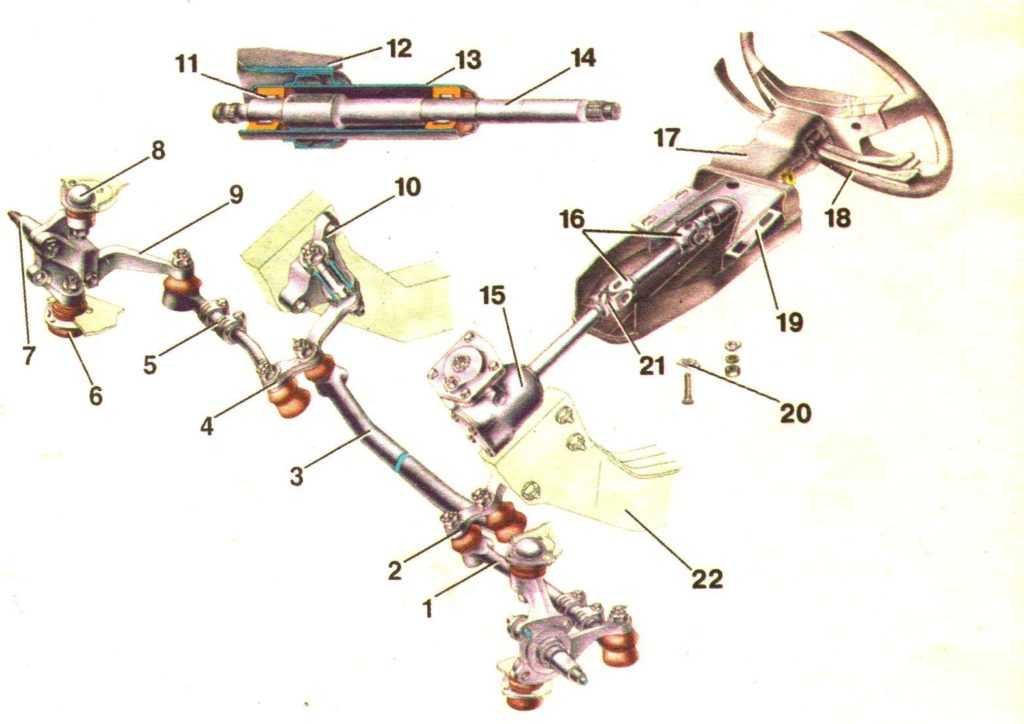
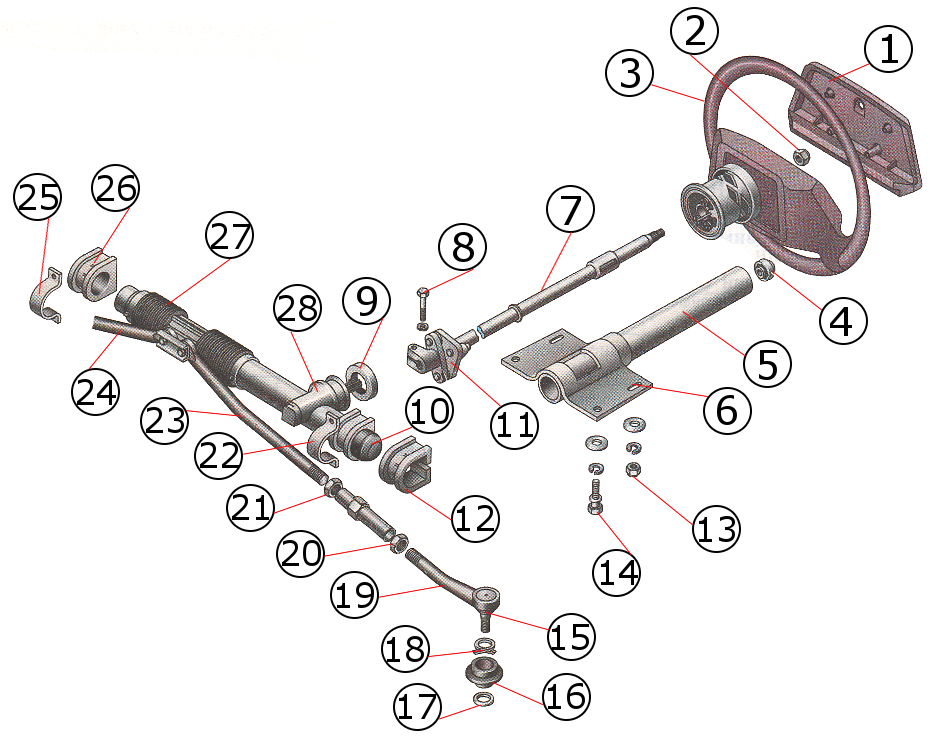
Элементы рулевого управления
1 – нижний шаровой шарнир;
2 – поворотный кулак;
3 – верхний шаровой шарнир;
4 – рычаг поворотного кулака;
5 – наконечник рулевой тяги;
6 – ось маятникового рычага;
7 – кронштейн маятникового рычага;
8 – маятниковый рычаг;
9 – редуктор рулевого механизма;
10 – уплотнитель вала;
11 – вал червяка;
12 – нижний карданный шарнир;
13 – промежуточный вал рулевого управления;
14 – верхний карданный шарнир;
15 – игольчатые подшипники верхнего вала;
16 – облицовочный кожух;
17 – верхний вал рулевого управления;
18 – рулевое колесо;
19 – подрулевые переключатели;
20 – труба кронштейна;
21 – кронштейн рулевого вала;
22 – регулировочная муфта;
23 – рулевая сошка;
24 – средняя тяга;
26 –боковая тяга.

Описание конструкции
Рулевое управление состоит из рулевого механизма и рулевого привода.
Рулевой механизм включает в себя рулевое колесо, рулевые валы, редуктор и детали крепления.
Рулевое колесо насажено на шлицевой конец верхнего рулевого вала и закреплено гайкой. На колесе установлен выключатель звуковых сигналов, закрытый пластмассовой крышкой.
Нижняя шлицевая часть верхнего рулевого вала соединяется со шлицевым концом вала редуктора через промежуточный вал с двумя карданными шарнирами. Шлицевые соединения карданных шарниров стянуты клеммами с болтами. Верхний рулевой вал установлен в трубе кронштейна крепления на двух игольчатых подшипниках. На трубе кронштейна установлены подрулевые переключатели.
Верхняя часть кронштейна рулевого вала закреплена на кузове двумя гайками, а нижняя – двумя винтами со срезными головками. В гнезде кронштейна установлен выключатель зажигания с блокирующим механизмом. Кронштейн и верхняя часть рулевого вала закрыты пластмассовыми кожухами.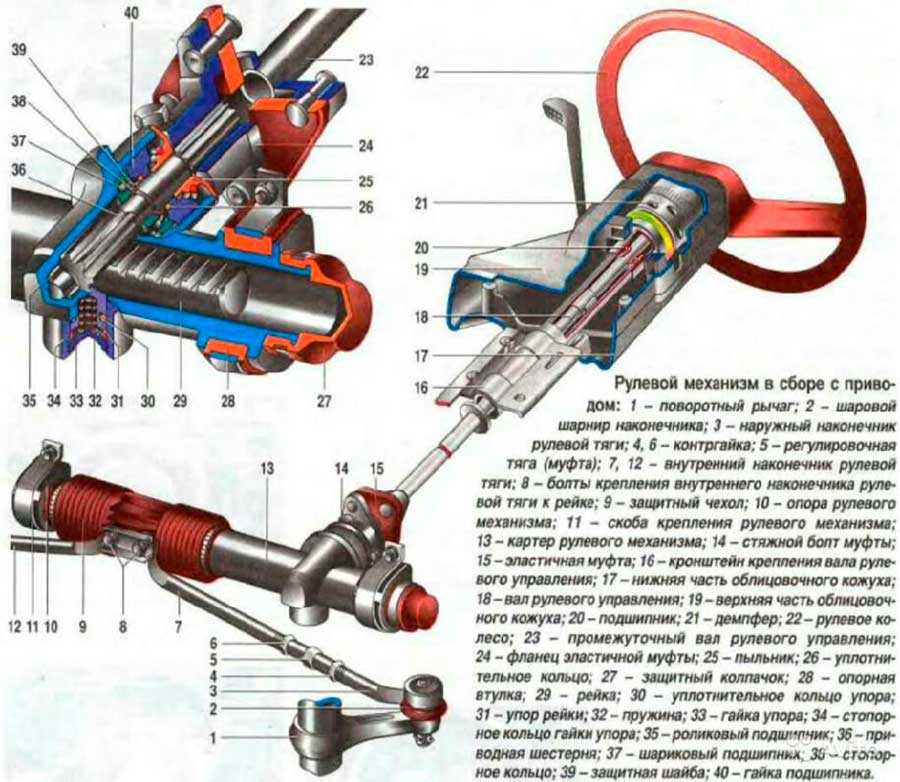
Картер редуктора рулевого механизма закреплен тремя болтами на левом лонжероне кузова внутри моторного отсека.
Глобоидальный червяк, который находится в зацеплении с роликом вала сошки, установлен в картере редуктора на двух радиально-упорных (регулируемых) шариковых подшипниках. Осевой зазор в подшипниках червяка регулируется подбором прокладок между картером и крышкой.
Вал сошки вращается в двух бронзовых втулках, запрессованных в картер. На верхнем конце вала сошки установлен на шариковых подшипниках двухгребневой ролик, а на нижнем на конических шлицах закреплена сошка рулевого механизма. Зацепление ролика с червяком регулируется винтом, установленным в верхней крышке картера.
Рулевой привод состоит из трех тяг, маятникового рычага, поворотных кулаков и их рычагов.
Средняя рулевая тяга шарнирами соединена с маятниковым рычагом и сошкой рулевого механизма. Боковые тяги состоят из двух резьбовых наконечников, соединенных между собой резьбовой муфтой. Муфты фиксируются на тягах стяжными хомутами. При вращении резьбовых муфт изменяется длина тяг и соответственно – угол схождения колес.
При вращении резьбовых муфт изменяется длина тяг и соответственно – угол схождения колес.
В наконечниках тяг также установлены шаровые шарниры для соединения с рычагами поворотных кулаков, сошкой рулевого механизма и маятниковым рычагом.
Кронштейн маятникового рычага закреплен двумя болтами на правом лонжероне кузова в моторном отсеке. В кронштейне установлены две пластмассовые втулки, в которых поворачивается ось рычага.
Угол поворота колес ограничен двумя упорами на сошке, которые при максимальных углах поворота рулевого колеса упираются в корпус редуктора.
- Устройство Ваз 2107
Особенности рулевого управления ВАЗ-2107
Рулевое управление состоит из рулевого механизма и рулевого привода
Рулевой механизм включает в себя рулевое колесо, рулевые валы, редуктор и детали крепления
Рулевое колесо насажено на шлицевой конец верхнего рулевого вала и закреплено гайкой. На колесе установлен выключатель звуковых сигналов, закрытый пластмассовой крышкой.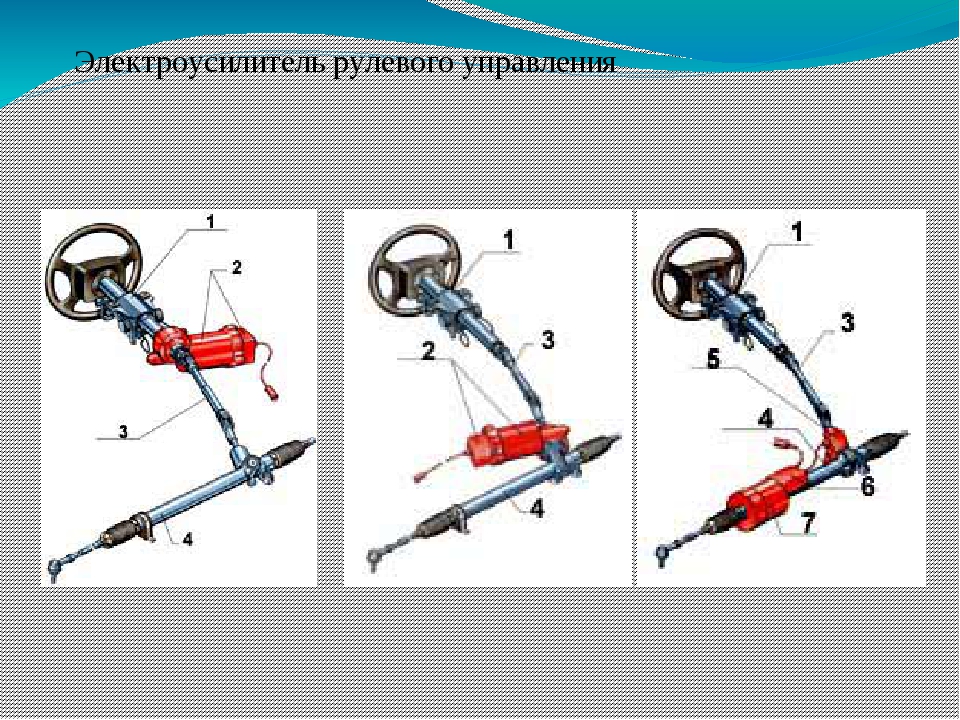
Нижняя шлицевая часть верхнего рулевого вала соединяется со шлицевым концом вала редуктора через промежуточный вал с двумя карданными шарнирами.
Шлицевые соединения карданных шарниров стянуты клеммами с болтами.
Верхний рулевой вал установлен в трубе кронштейна крепления на двух игольчатых подшипниках.
На трубе кронштейна установлены подрулевые переключатели.
Верхняя часть кронштейна рулевого вала закреплена на кузове двумя гайками, а нижняя – двумя винтами со срезными головками.
В гнезде кронштейна установлен выключатель зажигания с блокирующим механизмом.
Кронштейн и верхняя часть рулевого вала закрыты пластмассовыми кожухами.
Картер редуктора рулевого механизма закреплен тремя болтами на левом лонжероне кузова внутри моторного отсека.
Глобоидальный червяк, который находится в зацеплении с роликом вала сошки, установлен в картере редуктора на двух радиально-упорных (регулируемых) шариковых подшипниках.
Осевой зазор в подшипниках червяка регулируется подбором прокладок между картером и крышкой.
Вал сошки вращается в двух бронзовых втулках, запрессованных в картер.
На верхнем конце вала сошки установлен на шариковых подшипниках двухгребневой ролик, а на нижнем на конических шлицах закреплена сошка рулевого механизма.
Зацепление ролика с червяком регулируется винтом, установленным в верхней крышке картера.
Рулевой привод состоит из трех тяг, маятникового рычага, поворотных кулаков и их рычагов.
Средняя рулевая тяга шарнирами соединена с маятниковым рычагом и сошкой рулевого механизма.
Боковые тяги состоят из двух резьбовых наконечников, соединенных между собой резьбовой муфтой.
Муфты фиксируются на тягах стяжными хомутами. При вращении резьбовых муфт изменяется длина тяг и соответственно – угол схождения колес.
В наконечниках тяг также установлены шаровые шарниры для соединения с рычагами поворотных кулаков, сошкой рулевого механизма и маятниковым рычагом.
Кронштейн маятникового рычага закреплен двумя болтами на правом лонжероне кузова в моторном отсеке.
В кронштейне установлены две пластмассовые втулки, в которых поворачивается ось рычага.
Угол поворота колес ограничен двумя упорами на сошке, которые при максимальных углах поворота рулевого колеса упираются в корпус редуктора.
Возможные неисправности рулевого управления и методы устранения неисправностей
Причина (Метод устранения)
Увеличенный свободный ход рулевого колеса
Ослабление болтов крепления картера рулевого механизма — Затяните гайки
Ослабление гаек шаровых пальцев рулевых тяг — Затяните гайки
Увеличенный зазор в шаровых шарнирах — Замените наконечники или рулевые тяги
Увеличенный зазор в подшипниках ступиц передних колес — Отрегулируйте зазор
Увеличенный зазор в зацеплении ролика с червяком — Отрегулируйте зазор
Слишком большой зазор между осью маятникового рычага и втулками — Замените втулки или кронштейн в сборе
Увеличенный зазор в подшипниках червяка — Отрегулируйте зазор
Тугое вращение рулевого колеса
Деформация деталей рулевого привода — Замените деформированные детали
Неправильная установка углов передних колес — Проверьте углы установки колес и отрегулируйте
Нарушен зазор в зацеплении ролика с червяком — Отрегулируйте зазор
Перетянута регулировочная гайка оси маятникового рычага — Отрегулируйте затягивание гайки
Низкое давление в шинах передних колес — Установите нормальное давление
Повреждение деталей шаровых шарниров — Проверьте и замените поврежденные детали
Отсутствует масло в картере рулевого механизма — Проверьте и долейте. При необходимости замените сальник
При необходимости замените сальник
Несоосность вала червяка с валом рулевого механизма — Отрегулируйте шайбами соосность валов
Шум (стуки) в рулевом управлении
Увеличенный зазор в подшипниках ступиц передних колес — Отрегулируйте зазор
Ослабление гаек шаровых пальцев рулевых тяг — Затяните гайки
Увеличенный зазор между осью маятникового рычага и втулками — Замените втулки или кронштейн в сборе
Ослаблена регулировочная гайка оси маятникового рычага — Отрегулируйте затягивание гайки
Нарушен зазор в зацеплении ролика с червяком или в подшипниках червяка — Отрегулируйте зазор
Увеличенный зазор в шаровых шарнирах рулевых тяг — Замените наконечники или рулевые тяги
Ослабли болты крепления картера рулевого механизма или кронштейна маятникового рычага — Затяните гайки болтов крепления
Ослабли гайки крепления поворотных рычагов — Затяните гайки
Самовозбуждающееся угловое колебание передних колес
Давление в шинах не соответствует норме — Проверьте и установите нормальное давление
Нарушены углы установки передних колес — Проверьте и отрегулируйте углы установки передних колес
Увеличенный зазор в подшипниках ступиц передних колес — Отрегулируйте зазор
Дисбаланс колес — Отбалансируйте колеса
Ослабли гайки шаровых пальцев рулевых тяг — Проверьте и затяните гайки
Ослабли болты крепления картера рулевого механизма или кронштейна маятникового рычага — Проверьте и затяните гайки болтов крепления
Нарушен зазор в зацеплении ролика с червяком — Отрегулируйте зазор
Увод автомобиля от прямолинейного движения в какую-либо сторону
Неодинаковое давление в шинах — Проверьте и установите нормальное давление
Нарушены углы установки передних колес — Проверьте и отрегулируйте углы установки колес
Различная осадка пружин передней подвески — Замените непригодные пружины
Деформированы поворотные кулаки или рычаги подвески — Проверьте кулаки и рычаги, негодные детали замените
Неполное растормаживание одного или нескольких колес — Проверьте состояние тормозной системы
Утечка масла из картера
Износ сальника вала сошки или червяка — Замените сальник
Ослабление болтов, крепящих крышки картера рулевого механизма — Затяните болты
Повреждения уплотнительных прокладок — Замените прокладки
Неустойчивость автомобиля
Нарушены углы установки передних колес — Проверьте и отрегулируйте углы установки колес
Увеличенный зазор в подшипниках передних колес — Отрегулируйте зазор
Ослабление гаек шаровых пальцев рулевых тяг — Проверьте и затяните гайки
Слишком большой зазор в шаровых шарнирах рулевых тяг — Замените наконечники или рулевые тяги
Ослабление болтов крепления картера рулевого механизма или кронштейна маятникового рычага — Проверьте и затяните гайки болтов
Увеличенный зазор в зацеплении ролика и червяка — Отрегулируйте зазор
Деформированы поворотные кулаки или рычаги подвески — Проверьте кулаки и рычаги; замените деформированные детали
Рулевой механизм автомобиля
Многие согласятся, что двигатель – это основа автомобиля. И это действительно так. Однако представить машину без руля тоже сложно. Это важный и необходимый элемент в каждой машине. Сила рулевого управления заключается в обеспечении движения автомобиля в заданном направлении. Этот узел состоит из нескольких компонентов. Это руль, колонка, привод и рулевой механизм. О последнем мы и поговорим.
И это действительно так. Однако представить машину без руля тоже сложно. Это важный и необходимый элемент в каждой машине. Сила рулевого управления заключается в обеспечении движения автомобиля в заданном направлении. Этот узел состоит из нескольких компонентов. Это руль, колонка, привод и рулевой механизм. О последнем мы и поговорим.
Функции
Рулевой механизм выполняет несколько основных задач:
- Передача усилия на привод.
- Увеличить усилие, прилагаемое водителем к рулевому колесу.
- Самостоятельный возврат руля в нейтральное положение при снятии груза.
разновидности
Этот элемент может быть нескольких типов. На сегодняшний день встречаются следующие виды рулевых механизмов:
- Реечный.
- червь.
- Винт.
Что представляет собой каждый из них? Все эти типы механизмов мы рассмотрим отдельно.
Стеллаж
На данный момент является одним из самых распространенных. В основном, устанавливаются на легковые автомобили и кроссоверы. Рулевой механизм порывистого типа предполагает наличие следующих деталей:
В основном, устанавливаются на легковые автомобили и кроссоверы. Рулевой механизм порывистого типа предполагает наличие следующих деталей:
- шестерни.
- Рэйки.
Первый был установлен на рулевое дерево. Шестерня находится в постоянном зацеплении с зубчатой рейкой. Действует этот механизм достаточно просто. При повороте руля вправо или влево. В этом случае тяга присоединяется к приводу, поворачивающему управляемые колеса на заданный угол.
Среди достоинств такого механизма стоит отметить простоту конструкции, большой КПД и высокую жесткость. Однако этот механизм очень чувствителен к неровностям на дороге, из-за чего быстро изнашивается. Часто с проблемой стука рейки сталкивались владельцы подержанных автомобилей. Это следствие износа рулевого механизма. Поэтому элемент устанавливается только на определенные типы автомобилей. В основном это аннетивные автомобили с независимой передней подвеской. Если говорить о ВАЗе, то рейка встречается на всех моделях, начиная с «восьмерки».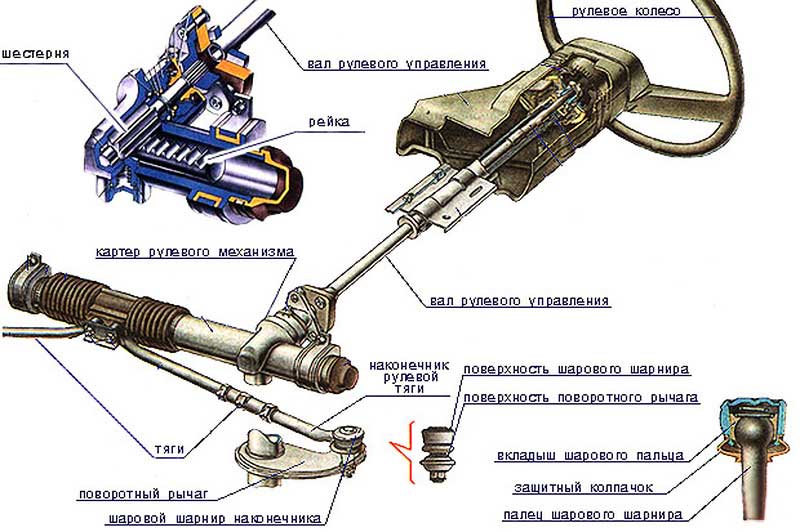 На «Классике» установлен немного другой рулевой механизм.
На «Классике» установлен немного другой рулевой механизм.
червячный
Именно этот тип используется на отечественных «Жигулях», а также на некоторых автобусах и малотоннажных грузовиках. Этот узел состоит из:
- Червяк шаровидного типа с переменным диаметром.
- Рулевой вал, с которым соединяется червяк.
- Ролик.
Снаружи рулевого механизма находится башня. Это специальный рычаг, который связан с приводными тягами. По такой же схеме устроен рулевой механизм на ГАЗ-3302.
Среди преимуществ такого узла стоит отметить меньшую чувствительность к ударным нагрузкам. Поэтому этот рулевой механизм, на ВАЗ-2107 устанавливаемый практически вечный. Владельцы редко сталкиваются со стуком и вибрациями на руле. Однако такая схема конструкции имеет больше соединений. Поэтому периодически механизм нуждается в регулировке.
резьбовой
Это более сложный узел по устройству. Включает:
- Винт. Расположен на валу рулевого колеса.

- Гайка. Он перемещается по предыдущему элементу.
- Зубчатая рейка.
- зубчатый селектор. Он соединен с рельсом.
- Рулевая Тша. Расположен на валу селектора.
Ключевой особенностью этого механизма является соединение гайки и винта. Крепление осуществляется с помощью шариков. Таким образом достигается меньший износ и трение пары.
Принцип действия винтового элемента аналогичен червячному. Рулевое вращение осуществляется за счет вращения винта, который перемещает гайку. Последний перемещается с помощью рельсового сектора, а вместе с ним и рулевой башни.
Где используется винтовой механизм? Часто его применяют на тяжелой коммерческой технике — грузовиках и автобусах. Если говорить о легковых автомобилях, то это только представители представительского класса. Механизм более сложен в устройстве и дорог, поэтому значительно увеличивает стоимость самого автомобиля.
усилитель
Сейчас практически на всех автомобилях стоит усилитель руля. Он служит для уменьшения усилий, которые необходимы для поворота передних колес. Этот элемент позволяет обеспечить высокую точность и скорость рулевого управления. На данный момент различают несколько типов усилителей:
Он служит для уменьшения усилий, которые необходимы для поворота передних колес. Этот элемент позволяет обеспечить высокую точность и скорость рулевого управления. На данный момент различают несколько типов усилителей:
- Гидравлический.
- Электрический.
Первый тип более популярен. Устанавливается как на легковые, так и на грузовые автомобили. Устройство усилителя имеет насос, создающий определенное давление в гидросистеме. В зависимости от стороны руля эта жидкость давит на первый или второй железнодорожный контур. Таким образом, снижается усилие, которое требуется приложить для вращения. Среди преимуществ гидравлической системы стоит отметить высокую надежность. Усилитель редко выходит из строя. Однако, поскольку насосный механизм приводится в движение коленчатым валом, часть мощности от двигателя перекрывается. Хотя на современных двигателях это вообще незаметно.
Электрический усилитель состоит из отдельного двигателя. Крутящий момент от него передается на вал самого руля. Конструкция применяется только на легковых автомобилях, так как не рассчитана на большие усилия.
Конструкция применяется только на легковых автомобилях, так как не рассчитана на большие усилия.
EUR оснащен отдельной электроникой, которая управляет этим двигателем. Иногда усилитель связывают с адаптивными системами, которые направлены на повышение безопасности при перемещении по полосе.
Среди инновационных решений стоит отметить систему динамического управления от Audi. Здесь передаточное число меняется в зависимости от текущей скорости автомобиля. Так, на высоких скоростях руль тугой и сбитый, а при парковке становится легким. Передаточное число изменяется с помощью сдвоенного планетарного редуктора, который добавляется к валу. Дело можно поворачивать от скорости автомобиля.
Заключение
Итак, мы выяснили, что собой представляет этот механизм. Это очень ответственный узел в рулевом управлении. Независимо от типа, его необходимо периодически проверять. Ведь потеря управления на скорости – самое опасное, что может случиться с водителем.
руль Последние исследовательские работы
Гибридная модель для прогнозирования визга рулевого тормоза на основе многотельной динамики и методов конечных элементов
Лицзюнь Чжан ◽
Юнчао Донг ◽
Дэцзянь Мэн ◽
Венбо Ли
Заключительный элемент ◽
Гибридная модель ◽
Многотельная динамика ◽
Методы конечных элементов ◽
Боковая сила ◽
Руль ◽
Комплексное собственное значение ◽
Визг тормозов ◽
Комплексный анализ собственных значений ◽
Напряжение и деформация
В последние годы все больше внимания привлекает проблема визга автомобильных тормозов при рулевом торможении. В условиях визга переносится нагрузка подрессоренной массы, а на шину создается боковая сила, приводящая к напряжению и деформации системы подвески. Чтобы предсказать склонность рулевого тормоза к визгу и изучить его механизм, мы создали гибридную модель динамики нескольких тел и методы конечных элементов для передачи значений смещения каждой точки соединения подвески между двумя моделями. Мы успешно предсказали возникновение визга рулевого тормоза, используя комплексный метод анализа собственных значений. После этого мы проанализировали распределение граничного давления между колодками и диском, и результаты показали, что распределение становится неравномерным с увеличением угла поворота рулевого колеса. Кроме того, изменения условий контакта и удержания между колодками и диском являются ключевыми механизмами визга рулевого тормоза.
В условиях визга переносится нагрузка подрессоренной массы, а на шину создается боковая сила, приводящая к напряжению и деформации системы подвески. Чтобы предсказать склонность рулевого тормоза к визгу и изучить его механизм, мы создали гибридную модель динамики нескольких тел и методы конечных элементов для передачи значений смещения каждой точки соединения подвески между двумя моделями. Мы успешно предсказали возникновение визга рулевого тормоза, используя комплексный метод анализа собственных значений. После этого мы проанализировали распределение граничного давления между колодками и диском, и результаты показали, что распределение становится неравномерным с увеличением угла поворота рулевого колеса. Кроме того, изменения условий контакта и удержания между колодками и диском являются ключевыми механизмами визга рулевого тормоза.
Проектирование и оценка архитектуры удаленного вождения в мобильных сетях 4G и 5G
Джос ден Оуден ◽
Виктор Хо ◽
Тийс ван дер Смагт ◽
Герд Какес ◽
Саймон Роммель ◽
. ..
..
Мобильные сети ◽
Большой масштаб ◽
Восприятие расстояния ◽
Время реакции ◽
Мобильная сеть ◽
Автоматизированная система ◽
Руль ◽
Потенциальная игра ◽
Развитие дизайна ◽
Удаленное вождение
Несмотря на прогресс в разработке автоматизированных транспортных средств за последнее десятилетие, до достижения уровня надежности, необходимого при крупномасштабном развертывании, по экономичной цене и в сочетании с требованиями безопасности еще далеко. В некоторых случаях использования, таких как автоматизированные шаттлы и такси, где больше не требуются даже рулевое колесо и педали, можно реализовать дистанционное вождение, чтобы восполнить этот пробел; удаленный оператор может взять на себя управление транспортным средством в ситуациях, когда автоматизированной системе слишком сложно определить дальнейшие действия. В логистике его можно было бы внедрить даже для решения уже более насущных проблем, таких как нехватка водителей грузовиков, за счет предоставления более гибких условий работы и меньшего времени простоя грузовика. Важным аспектом дистанционного вождения является связь между удаленной станцией и транспортным средством. С текущим развертыванием мобильной технологии 5G во многих странах мира внедрение удаленного вождения приближается к крупномасштабному развертыванию. 5G может изменить правила игры в развертывании этой технологии. В этой работе мы исследуем приложение для удаленного вождения и производительность удаленного вождения на уровне сети в недавно развернутой коммерческой автономной (SA) мобильной сети 5G с частотой менее 6 ГГц. Он оценивает влияние архитектуры 5G, такой как интеграция мобильных граничных вычислений (MEC), локальный выход и задержка, на производительность приложений удаленного вождения. Мы описываем проектирование, разработку (на основе аппаратного моделирования в цикле) и оценку производительности решения для удаленного вождения, протестированного в мобильных сетях SA 5G и 4G с использованием двух разных транспортных средств и двух разных удаленных станций. Для оценки производительности приложения и сети были определены два тестовых случая, которые оцениваются на основе точности определения местоположения, относительного времени реакции и восприятия расстояния.
Важным аспектом дистанционного вождения является связь между удаленной станцией и транспортным средством. С текущим развертыванием мобильной технологии 5G во многих странах мира внедрение удаленного вождения приближается к крупномасштабному развертыванию. 5G может изменить правила игры в развертывании этой технологии. В этой работе мы исследуем приложение для удаленного вождения и производительность удаленного вождения на уровне сети в недавно развернутой коммерческой автономной (SA) мобильной сети 5G с частотой менее 6 ГГц. Он оценивает влияние архитектуры 5G, такой как интеграция мобильных граничных вычислений (MEC), локальный выход и задержка, на производительность приложений удаленного вождения. Мы описываем проектирование, разработку (на основе аппаратного моделирования в цикле) и оценку производительности решения для удаленного вождения, протестированного в мобильных сетях SA 5G и 4G с использованием двух разных транспортных средств и двух разных удаленных станций. Для оценки производительности приложения и сети были определены два тестовых случая, которые оцениваются на основе точности определения местоположения, относительного времени реакции и восприятия расстояния. Результаты показывают, что производительность сети достаточна для приложений удаленного вождения на относительно низких скоростях (<40 км/ч). Сетевые задержки по сравнению с 4G сократились вдвое. Сильная корреляция между задержкой и эффективностью удаленного вождения четко не просматривается и требует дальнейшей оценки с учетом влияния пользовательского интерфейса.
Результаты показывают, что производительность сети достаточна для приложений удаленного вождения на относительно низких скоростях (<40 км/ч). Сетевые задержки по сравнению с 4G сократились вдвое. Сильная корреляция между задержкой и эффективностью удаленного вождения четко не просматривается и требует дальнейшей оценки с учетом влияния пользовательского интерфейса.
Обоснование влияния изменения коэффициента осевого распределения тормозного усилия на управляемость легкового автомобиля
Александр Назаров ◽
◽
Виталий Кашканов ◽
Роман Гуменюк ◽
Евгений Котик ◽
…
Центр массы ◽
Продольная ось ◽
Физические характеристики ◽
Руль ◽
Система торможения ◽
Тормозная сила ◽
Мгновенный центр ◽
Процесс торможения ◽
Электронное отслеживание ◽
Новые алгоритмы
В статье рассмотрено изменение радиуса мгновенного центра вращения автомобиля, движущегося по криволинейной траектории, при торможении с учетом бокового входа колес обеих осей автомобилей, как оборудованных электронными системами слежения, так и не оборудованных такой. Критерий оценки управляемости автомобилей, движущихся по криволинейной траектории в заторможенном состоянии, путем сравнения отношения текущей скорости автомобиля к продольной базе с отношением коэффициентов бокового ввода шины к произведению продольной базы автомобиля, массы и косинусов. Установлено, что радиус мгновенного поворота продольной оси автомобиля, движущегося по криволинейной траектории, при торможении зависит от скорости движения центра масс автомобиля, коэффициента осевого распределения тормозного усилия, физических характеристик применяемых шин. , угол поворота руля и конструктивно-массовые параметры. Как следствие, позволяет установить управляемость. Авторами получены зависимости, которые позволят создать новые алгоритмы работы современных электронных систем стабилизации продольной оси заторможенного автомобиля с учетом скорости автомобиля, его конструктивно-весовых характеристик, основных характеристик его тормозной системы ( коэффициент распределения осевого тормозного усилия), физические характеристики применяемых шин на колесах и связь их с углами поворота управляемых колес, контролирующих отклонение продольной оси, что позволяет водителю сохранять возможность достаточно резких маневров непосредственно в процессе торможения , двигаясь по криволинейной траектории.
Критерий оценки управляемости автомобилей, движущихся по криволинейной траектории в заторможенном состоянии, путем сравнения отношения текущей скорости автомобиля к продольной базе с отношением коэффициентов бокового ввода шины к произведению продольной базы автомобиля, массы и косинусов. Установлено, что радиус мгновенного поворота продольной оси автомобиля, движущегося по криволинейной траектории, при торможении зависит от скорости движения центра масс автомобиля, коэффициента осевого распределения тормозного усилия, физических характеристик применяемых шин. , угол поворота руля и конструктивно-массовые параметры. Как следствие, позволяет установить управляемость. Авторами получены зависимости, которые позволят создать новые алгоритмы работы современных электронных систем стабилизации продольной оси заторможенного автомобиля с учетом скорости автомобиля, его конструктивно-весовых характеристик, основных характеристик его тормозной системы ( коэффициент распределения осевого тормозного усилия), физические характеристики применяемых шин на колесах и связь их с углами поворота управляемых колес, контролирующих отклонение продольной оси, что позволяет водителю сохранять возможность достаточно резких маневров непосредственно в процессе торможения , двигаясь по криволинейной траектории.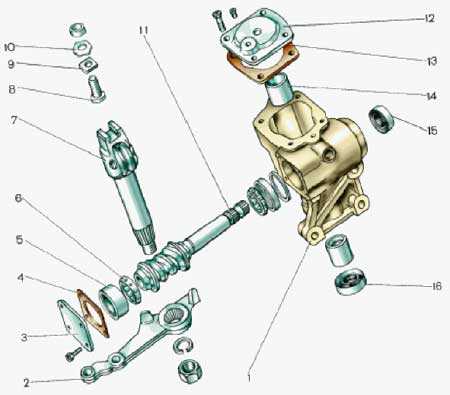
Особенности вождения автомобиля за рулем
Александр Дитятев ◽
Рулевая система ◽
Методы диагностики ◽
Параллельная структура ◽
Руль ◽
Алгебраические уравнения ◽
Последовательная структура ◽
Поворотный рычаг ◽
Рулевой механизм ◽
Лево и право ◽
Низкая эффективность
Существующие методы диагностики рулевого управления могут характеризоваться низкой эффективностью. В силу разных причин как декларативные, так и фактические (поддерживаемые аппаратурой) методы, как правило, имеют низкую точность и неспособность локализовать неисправности. Встроенная диагностика автомобиля не может повлиять на ситуацию из-за малого количества датчиков в системе рулевого управления. К причинам низкой точности методов относятся конструктивные особенности, низкая доступность компонентов (низкая ремонтопригодность). Трудности в локализации неисправностей вызывает конструктивная схема, для которой характерно параллельно-последовательное построение. Проанализированы параметры методов диагностики, в основу предлагаемого метода положена структура рулевого управления, при реализации которой тестовые воздействия применяются к управляемым колесам. Всего необходимо провести три измерения зазоров и в результате математической обработки результатов становится возможным локализовать неисправность в трех звеньях последовательных элементов рулевого механизма или рулевого привода. В соответствии с этим подходом рулевое управление рассматривается как совокупность трех структур — параллельных и двух последовательных. В качестве модели использовалось реечное рулевое управление. Здесь в параллельную структуру входят элементы рулевой тяги: маятник, левый и правый; рулевая тяга, левая и правая; рулевая рейка — левый и правый шарниры. Последовательная структура — левая, включает поворотный рычаг, левый; рулевая тяга, левая; шарнир рулевой рейки левый; рулевой механизм, рулевой вал, рулевое колесо. Соответственно, в последовательную структуру права входят аналогичные элементы с атрибутом «право».
Проанализированы параметры методов диагностики, в основу предлагаемого метода положена структура рулевого управления, при реализации которой тестовые воздействия применяются к управляемым колесам. Всего необходимо провести три измерения зазоров и в результате математической обработки результатов становится возможным локализовать неисправность в трех звеньях последовательных элементов рулевого механизма или рулевого привода. В соответствии с этим подходом рулевое управление рассматривается как совокупность трех структур — параллельных и двух последовательных. В качестве модели использовалось реечное рулевое управление. Здесь в параллельную структуру входят элементы рулевой тяги: маятник, левый и правый; рулевая тяга, левая и правая; рулевая рейка — левый и правый шарниры. Последовательная структура — левая, включает поворотный рычаг, левый; рулевая тяга, левая; шарнир рулевой рейки левый; рулевой механизм, рулевой вал, рулевое колесо. Соответственно, в последовательную структуру права входят аналогичные элементы с атрибутом «право».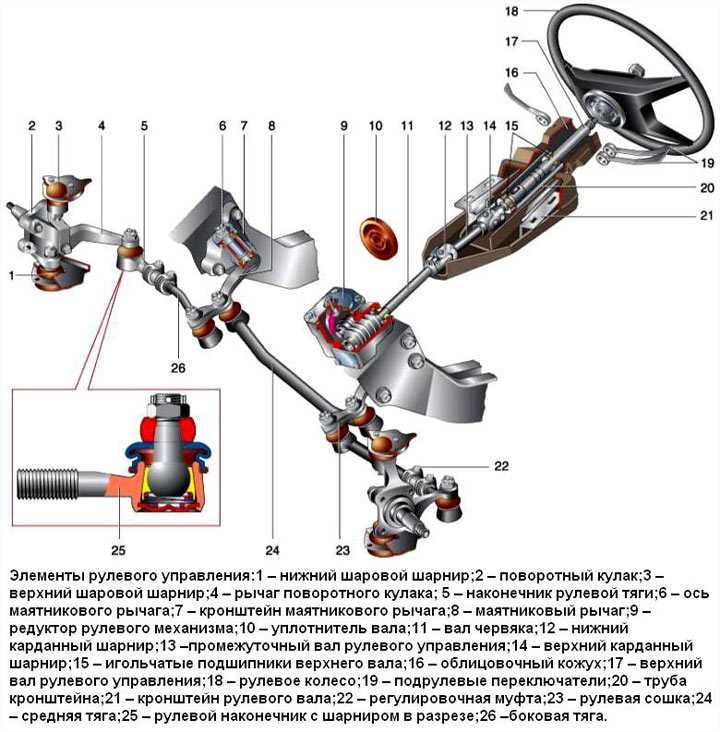 Аналогично рассматривается структура рулевого люфта. В результате становится возможным получить преобразованную систему из трех алгебраических уравнений, связывающих зазоры в трех группах сопряжений и зазоров параллельно и двух последовательных рулевых структур. Для измерения люфта использовались вертушки стенда BOSCH FWA 4410; в другом варианте колеса были вывешены. В результате испытаний, проведенных на автомобилях VW GOLF, VW PASSAT и RENAULT 25 со значительным пробегом, были получены данные, свидетельствующие о необходимости технических вмешательств на локализованных группах интерфейсов.
Аналогично рассматривается структура рулевого люфта. В результате становится возможным получить преобразованную систему из трех алгебраических уравнений, связывающих зазоры в трех группах сопряжений и зазоров параллельно и двух последовательных рулевых структур. Для измерения люфта использовались вертушки стенда BOSCH FWA 4410; в другом варианте колеса были вывешены. В результате испытаний, проведенных на автомобилях VW GOLF, VW PASSAT и RENAULT 25 со значительным пробегом, были получены данные, свидетельствующие о необходимости технических вмешательств на локализованных группах интерфейсов.
Автономные транспортные средства
Яир Уайзман
Автономные транспортные средства ◽
Руль ◽
Мир ◽
Беспилотные автомобили ◽
Один шаг ◽
Пульт
Первый автомобиль был изобретен в 1870 году Зигфридом Маркусом. На самом деле это была просто повозка с двигателем, но без руля и без тормозов. Вместо этого он управлялся ногами водителя. Преобразование традиционных транспортных средств в автономные транспортные средства — это не один шаг. Первый шаг был сделан всего через 28 лет после изобретения автомобилей, то есть через 189 лет.8. Идея этого шага заключалась в том, чтобы управлять транспортным средством с помощью пульта дистанционного управления. С момента этого первого шага и по мере того, как компьютеры становились продвинутыми и сложными, многие функции современных автомобилей были преобразованы в полностью автоматические без необходимости даже в дистанционном управлении. Переключение передач было одним из первых действий, которые можно было делать автоматически без участия водителя, поэтому такие автомобили получили название «автомобили»; однако в настоящее время есть автомобили, которые могут полностью передвигаться сами по себе, хотя в большинстве стран мира им еще не разрешено передвигаться по дорогам общего пользования. Такие транспортные средства называются «автономными транспортными средствами» или «беспилотными автомобилями».
Преобразование традиционных транспортных средств в автономные транспортные средства — это не один шаг. Первый шаг был сделан всего через 28 лет после изобретения автомобилей, то есть через 189 лет.8. Идея этого шага заключалась в том, чтобы управлять транспортным средством с помощью пульта дистанционного управления. С момента этого первого шага и по мере того, как компьютеры становились продвинутыми и сложными, многие функции современных автомобилей были преобразованы в полностью автоматические без необходимости даже в дистанционном управлении. Переключение передач было одним из первых действий, которые можно было делать автоматически без участия водителя, поэтому такие автомобили получили название «автомобили»; однако в настоящее время есть автомобили, которые могут полностью передвигаться сами по себе, хотя в большинстве стран мира им еще не разрешено передвигаться по дорогам общего пользования. Такие транспортные средства называются «автономными транспортными средствами» или «беспилотными автомобилями».
Влияние положения центра масс прицепа категории О1 на устойчивость автопоезда
Владимир Сахно ◽
◽
Виктор Поляков ◽
Светлана Шарай ◽
Ируна Човча ◽
…
Критическая скорость ◽
Центр массы ◽
Параметры дизайна ◽
Руль ◽
Поперечное смещение ◽
Максимальное смещение ◽
Дорога ◽
Стабильность курса ◽
Стабильность ◽
Колебания нестабильности
В ряду эксплуатационных свойств автомобиля (АТЗ) при тенденции увеличения скоростей движения наиболее важными показателями сохраняемого качества, в любых режимах, являются устойчивость и управляемость. Выбор конструктивных параметров АТЗ, обеспечивающих эти свойства, повышает активную безопасность эксплуатации и снижает вероятность дорожно-транспортных происшествий при выполнении транспортных операций. С точки зрения практических целей при эксплуатации АТЗ становится важной не только причина нарушения устойчивости, но и реакция на нее АТЗ и управляющие действия водителя, которые неоднозначны и неустойчивы. Поэтому предполагается, что устойчивость и управляемость движения АТЗ должны обеспечиваться конструктивными параметрами самой машины. Результатом анализа курсовой устойчивости автопоезда стало выражение критической скорости прямолинейного движения. По разработанной математической модели определяется критическая скорость. Расчеты проводились для автопоезда, состоящего из автомобиля ВАЗ-2107 и одноосного прицепа, при различной загрузке прицепа и различном расположении его центра масс. По исходным данным, присущим номинальной загрузке автомобиля и максимальной загрузке прицепа и расположению центра масс прицепа на продольной оси и в центре масс грузовой платформы, критическая скорость равна около 36 м/с (1290,6 км/ч). В переходных режимах движения, таких как «вхождение в круг и движение по кругу», «рывок руля», «сдвиг», «змейка», смещение центра масс прицепа как в продольном, так и в поперечном плоскостях критическая скорость уменьшается, причем более существенное снижение происходит при поперечном смещении центра масс.
Поэтому предполагается, что устойчивость и управляемость движения АТЗ должны обеспечиваться конструктивными параметрами самой машины. Результатом анализа курсовой устойчивости автопоезда стало выражение критической скорости прямолинейного движения. По разработанной математической модели определяется критическая скорость. Расчеты проводились для автопоезда, состоящего из автомобиля ВАЗ-2107 и одноосного прицепа, при различной загрузке прицепа и различном расположении его центра масс. По исходным данным, присущим номинальной загрузке автомобиля и максимальной загрузке прицепа и расположению центра масс прицепа на продольной оси и в центре масс грузовой платформы, критическая скорость равна около 36 м/с (1290,6 км/ч). В переходных режимах движения, таких как «вхождение в круг и движение по кругу», «рывок руля», «сдвиг», «змейка», смещение центра масс прицепа как в продольном, так и в поперечном плоскостях критическая скорость уменьшается, причем более существенное снижение происходит при поперечном смещении центра масс. Так, если при максимальном смещении центра масс прицепа по оси абсцисс (x = -0,75 м) скорость колебательной неустойчивости уменьшается на 36,4 % (Gn = 350 кг), 38,4 % (Gn = 500 кг). кг) и 44,3 % (Gn = 750 кг) по сравнению с этой скоростью при отсутствии перемещения, то при максимальном перемещении по оси ординат скорость колебаний неустойчивости уменьшается на 45,4 %, 55,2 % и 63,6 % соответственно . При такой загрузке прицепа происходит смещение центра масс прицепа как по оси абсцисс, так и по оси у, происходит дальнейшее снижение как критической скорости автопоезда, так и скорости колебательной неустойчивости. Это необходимо учитывать при загрузке прицепа.
Так, если при максимальном смещении центра масс прицепа по оси абсцисс (x = -0,75 м) скорость колебательной неустойчивости уменьшается на 36,4 % (Gn = 350 кг), 38,4 % (Gn = 500 кг). кг) и 44,3 % (Gn = 750 кг) по сравнению с этой скоростью при отсутствии перемещения, то при максимальном перемещении по оси ординат скорость колебаний неустойчивости уменьшается на 45,4 %, 55,2 % и 63,6 % соответственно . При такой загрузке прицепа происходит смещение центра масс прицепа как по оси абсцисс, так и по оси у, происходит дальнейшее снижение как критической скорости автопоезда, так и скорости колебательной неустойчивости. Это необходимо учитывать при загрузке прицепа.
Стратегия распределения крутящего момента для четырех полноприводного электромобиля на основе многоуровневого управления
Увэй Чен ◽
Линьфэн Чжао ◽
Цзиньфан Ху ◽
Донгкуй Тан ◽
Сяовэнь Сан
Система контроля ◽
Оптимальное размещение ◽
Нижний слой ◽
Контроль стабильности ◽
Контроль крутящего момента ◽
Руль ◽
Моторный привод ◽
Устойчивость автомобиля ◽
Крутящий момент ◽
момент рыскания
Дифференциальный крутящий момент четырехколесного электромобиля будет влиять на устойчивость автомобиля, и, следовательно, применение вспомогательного рулевого управления с дифференциальным приводом (DDAS) будет ограничено. Для решения этой проблемы необходимы анализ устойчивости и разработка системы управления, поэтому система управления устойчивостью DDAS разработана на основе многоуровневого управления моментом рыскания. Корреляционные функции используются для отражения сдвигов характеристического состояния транспортного средства между устойчивым и неустойчивым состояниями и помогают определить контрольный вес каждой подсистемы в контроллере нижнего уровня. В контроллере нижнего уровня стратегия прямого управления крутящим моментом на рулевом колесе используется для построения контроллера DDAS. При различных состояниях движения транспортного средства дифференциальный крутящий момент и момент рыскания изменяются с изменением управляющих грузов; а в соответствии с теорией квадратичного программирования оптимальное распределение крутящего момента на четыре колеса будет производиться в соответствии с общим крутящим моментом. Эффективность предлагаемой системы управления подтверждена численным моделированием и аппаратным экспериментом.
Для решения этой проблемы необходимы анализ устойчивости и разработка системы управления, поэтому система управления устойчивостью DDAS разработана на основе многоуровневого управления моментом рыскания. Корреляционные функции используются для отражения сдвигов характеристического состояния транспортного средства между устойчивым и неустойчивым состояниями и помогают определить контрольный вес каждой подсистемы в контроллере нижнего уровня. В контроллере нижнего уровня стратегия прямого управления крутящим моментом на рулевом колесе используется для построения контроллера DDAS. При различных состояниях движения транспортного средства дифференциальный крутящий момент и момент рыскания изменяются с изменением управляющих грузов; а в соответствии с теорией квадратичного программирования оптимальное распределение крутящего момента на четыре колеса будет производиться в соответствии с общим крутящим моментом. Эффективность предлагаемой системы управления подтверждена численным моделированием и аппаратным экспериментом. Результаты показывают, что предложенный метод управления позволяет повысить устойчивость автомобиля и обеспечить безопасность вождения.
Результаты показывают, что предложенный метод управления позволяет повысить устойчивость автомобиля и обеспечить безопасность вождения.
Выявление действий, не связанных с вождением автомобиля, которые могут повлиять на процесс поглощения
Личао Ян ◽
Махди Бабаи Семироми ◽
Ян Син ◽
Чен Лв ◽
Джеймс Брайтон ◽
…
Осведомленность о ситуации ◽
Тактильная обратная связь ◽
Движение рук ◽
Процесс перехода ◽
Система распознавания ◽
Руль ◽
Автоматизированное вождение ◽
Поведение водителя ◽
Активный режим ◽
Влияние
При условно-автоматизированном вождении участие в неуправляемых действиях (НДА) можно рассматривать как основной фактор, влияющий на эффективность управления водителем, исследование которого имеет большое значение для проектирования интеллектуального человеко-машинного интерфейса для управления транспортным средством. безопасный и плавный переход управления. В этой статье представлена система на основе трехмерной сверточной нейронной сети для распознавания шести типов поведения водителя (четыре типа NDA и два типа вождения) с помощью двух видеопотоков, основанных на движениях головы и рук. На основе взаимодействия водителя и объекта выбранные NDA делятся на активный режим и пассивный режим. Предлагаемая система распознавания достигает точности 85,87% для классификации шести видов деятельности. Далее исследуется влияние NDA на осведомленность водителя о ситуации и качество передачи управления с точки зрения как типа деятельности, так и режима взаимодействия. Результаты показывают, что при аналогичном уровне достигаемой максимальной боковой ошибки включение NDA требует от водителей больше времени для выполнения передачи управления, особенно для включения NDA в активном режиме, который требует больше умственных усилий и снижает чувствительность водителей к вождению. изменение ситуации. Более того, крутящий момент тактильной обратной связи от рулевого колеса может помочь сократить время процесса перехода, что можно рассматривать как продуктивную систему помощи в процессе передачи управления.
безопасный и плавный переход управления. В этой статье представлена система на основе трехмерной сверточной нейронной сети для распознавания шести типов поведения водителя (четыре типа NDA и два типа вождения) с помощью двух видеопотоков, основанных на движениях головы и рук. На основе взаимодействия водителя и объекта выбранные NDA делятся на активный режим и пассивный режим. Предлагаемая система распознавания достигает точности 85,87% для классификации шести видов деятельности. Далее исследуется влияние NDA на осведомленность водителя о ситуации и качество передачи управления с точки зрения как типа деятельности, так и режима взаимодействия. Результаты показывают, что при аналогичном уровне достигаемой максимальной боковой ошибки включение NDA требует от водителей больше времени для выполнения передачи управления, особенно для включения NDA в активном режиме, который требует больше умственных усилий и снижает чувствительность водителей к вождению. изменение ситуации. Более того, крутящий момент тактильной обратной связи от рулевого колеса может помочь сократить время процесса перехода, что можно рассматривать как продуктивную систему помощи в процессе передачи управления.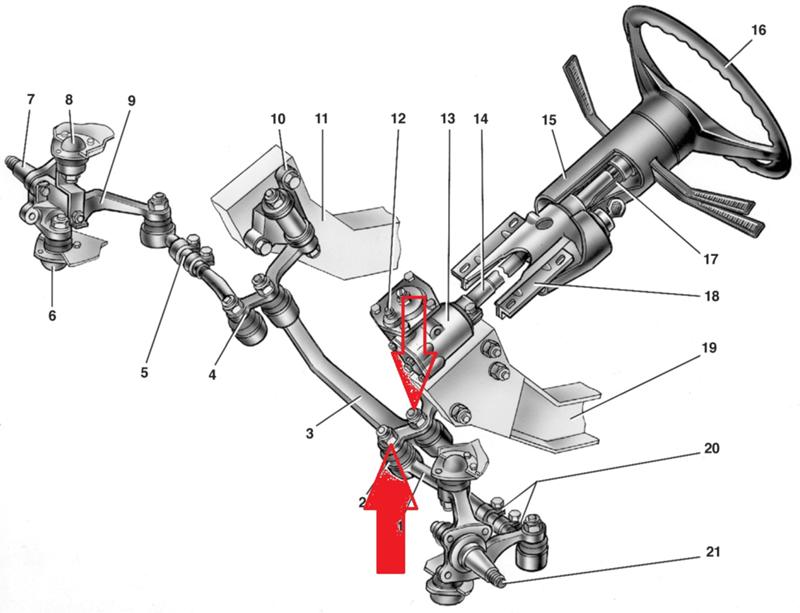
Валидация симулятора вождения транспортного средства с точки зрения поведения вождения на основе скорости и траектории в условиях кривой
Лян Чен ◽
Цзиминь Се ◽
Симин Ву ◽
Фэнсян Го ◽
Чжэн Чен ◽
…
Симулятор вождения ◽
Краткосрочная память ◽
Дорожное движение ◽
Боковое смещение ◽
Оценка безопасности ◽
Поведение за рулем ◽
Руль ◽
Скорость автомобиля ◽
Симуляторы вождения ◽
Удобная настройка
Благодаря преимуществам высокой экспериментальной безопасности, удобной настройки сцен и легкого извлечения параметров управления симуляторы вождения играют все более важную роль в научных исследованиях, таких как оценка безопасности дорожного движения и исследование характеристик поведения при вождении. Между тем спрос на валидацию симуляторов вождения растет по мере продвижения их приложений.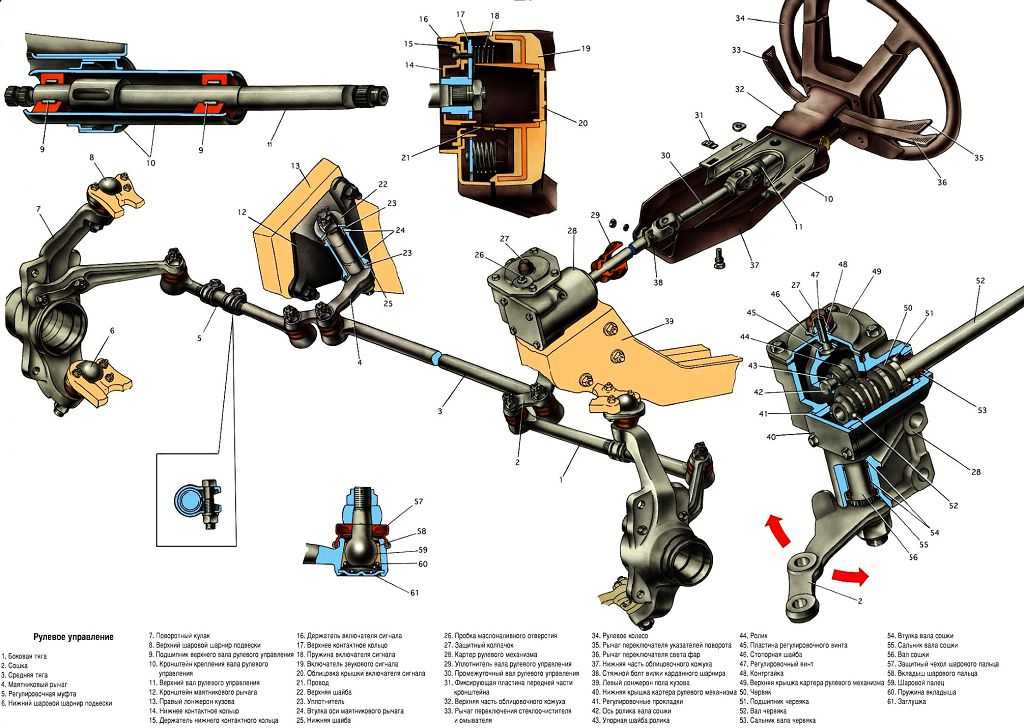 Чтобы проверить симулятор вождения в сложной среде, в качестве сценариев экспериментальной оценки рассматриваются кривые дорожные условия с различными радиусами. Для этого в данной статье анализируется надежность и точность определения скорости экспериментального транспортного средства в симуляторе вождения. Затем проводится качественный и количественный анализ бокового отклонения траектории движения транспортного средства с применением метода косинусного подобия. Кроме того, был принят метод, основанный на данных, который принимает продольное смещение, поперечное смещение, скорость транспортного средства и угол поворота рулевого колеса транспортного средства в качестве входных данных и поперечное смещение в качестве выходных данных. Таким образом, создается модель планирования криволинейной траектории, более комплексная и человеческая операция. На основе направленной долговременной кратковременной памяти (Bi-LSTM) и рекуррентной нейронной сети (RNN) предлагается множественный Bi-LSTM (Mul-Bi-LSTM).
Чтобы проверить симулятор вождения в сложной среде, в качестве сценариев экспериментальной оценки рассматриваются кривые дорожные условия с различными радиусами. Для этого в данной статье анализируется надежность и точность определения скорости экспериментального транспортного средства в симуляторе вождения. Затем проводится качественный и количественный анализ бокового отклонения траектории движения транспортного средства с применением метода косинусного подобия. Кроме того, был принят метод, основанный на данных, который принимает продольное смещение, поперечное смещение, скорость транспортного средства и угол поворота рулевого колеса транспортного средства в качестве входных данных и поперечное смещение в качестве выходных данных. Таким образом, создается модель планирования криволинейной траектории, более комплексная и человеческая операция. На основе направленной долговременной кратковременной памяти (Bi-LSTM) и рекуррентной нейронной сети (RNN) предлагается множественный Bi-LSTM (Mul-Bi-LSTM).