
Системы активной безопасности авто | Как работает антиблокировочная система автомобиля
Нередко одно слишком сильное нажатие на педаль тормоза или неосторожный поворот руля может привести к печальным последствиям – от заноса до вылета на встречную полосу движения. Чтобы минимизировать риск возникновения подобных ситуаций инженеры ведущих автокорпораций оснащают машины полезными системами, которые оказывают реальную помощь водителю и делают управление авто необычайно комфортным и простым.
Что такое ASR?
Automatic Slip Regulation, или ASR, – это одна из систем активной безопасности автомобиля. Антипробуксовочная система направлена на недопущение блокировки колес в условиях, когда машина движется по бездорожью или по сложному покрытию – например, по льду. Кроме того, ASR дает возможность избежать пробуксовки при старте на скользкой дороге.
Принцип работы ASR:
— Датчик информирует об изменениях блока управления, который в свою очередь обрабатывает поступивший сигнал. — БУ сравнивает скорости вращения колес, а затем передает команду исполнительному механизму. — Механизм снижает скорость вращения того колеса, которое пробуксовывает, и согласовывает ее с показателями других колес.
— БУ сравнивает скорости вращения колес, а затем передает команду исполнительному механизму. — Механизм снижает скорость вращения того колеса, которое пробуксовывает, и согласовывает ее с показателями других колес.
Как работает ASR?
Влияние на ведущие колеса осуществляется двумя способами:
Когда машина двигается со скоростью, предположим, 60 км/ч (у каждой марки – свой показатель), колесо, которое пробуксовывает, притормаживается тормозной системой. Благодаря чему это происходит? Насос для тормозной жидкости, который входит в состав ASR, создает необходимое давление, соленоиды приводят в действие клапаны, которые и осуществляют подачу жидкости на тормозные цилиндры. Если установленная предельная скорость превышена, то блок управления антипробуксовочной системы сигнализирует об этом двигателю, а тот в свою очередь снижает крутящий момент.
Можно ли отключить ASR?
При необходимости Вы можете деактивировать систему. Как правило, эта опция полезна для новичков, которые хотят отработать навыки вождения на пустой дороге.
Кнопка ASR OFF, позволяющая отключить опцию, в большинстве авто находится возле рычага коробки переключения передач или на приборной панели. Когда Вы нажмете на клавишу, загорится соответствующая лампочка.
Подробная инструкция по деактивации системы в Вашем автомобиле представлена в руководстве по эксплуатации машины.
«Двойники» системы
На автомобили различных марок устанавливаются аналогичные системы, которые имеют отличающиеся названия. Так, ASR – это прерогатива машин немецких брендов
 TCS – это характерная черта транспортных средств концерна Toyota.
TCS – это характерная черта транспортных средств концерна Toyota.ASR, как и прочие системы-двойники, входят в состав системы стабилизации курсовой устойчивости, известной как ESP.
Что такое ESP в машине?
Electronic Stability Program, или ESP, – это система электронного контроля устойчивости, которая также называется системой динамической стабилизации. Главная цель ESP – управление моментом силы колес, что позволяет устранить боковое движение и выровнять положение авто.
Как и ASR, система имеет несколько аналогов, которые используются в конкретных марках машин:
- На авто KIA, Hyundai и Honda устанавливается ESC.
- Rover, BMW и Jaguar комплектуются DSC.
- Отличительная черта Volvo – система DTSC.
- В машинах Acura можно встретить VSA.
- Модели Toyota агрегатируются VSC.
- В автомобилях Subaru, Nissan и Infiniti эксплуатируется система VDC.


Из чего состоит ESP?
В состав системы входит блок управления, измерительные приборы, которые контролируют разные параметры, и гидравлический блок.
Система курсовой устойчивости способна полноценно функционировать только совместно с иными системами активной безопасности авто: — Антиблокировочной тормозной системой ABS. — Антипробуксовочной системой ASR. — Системой распределения тормозных усилий EBD. — Электронной системой блокирования дифференциала EDS.
Как функционирует ESP?
Внешние датчики анализируют различные параметры – функционирование тормозной системы, особенности движения машины, положение акселератора, смена угла поворота руля. Эти данные передаются на БУ. Он сопоставляет полученные сведения с реальным движением машины. Если ESP решила, что водитель утратил контроль над авто, она вмешивается в управление, то есть задействует механизмы, которые связаны с иными системами активной безопасности.
Корректировка траектории движения машины осуществляется несколькими способами:
- За счет подтормаживания конкретных колес. Какие именно колеса будут притормаживаться, решает сама система. Так, при заносе осуществляется торможение наружным передним колесом.
- Благодаря изменению оборотов двигателя.
 Какие именно колеса будут притормаживаться, решает сама система. Так, при заносе осуществляется торможение наружным передним колесом.
Какие именно колеса будут притормаживаться, решает сама система. Так, при заносе осуществляется торможение наружным передним колесом.Также блок управления ESP взаимодействует с двигателем и автоматической коробкой переключения передач авто. Это позволяет системе корректировать их работу в форс-мажорных обстоятельствах.
Можно ли отключить ESP?
Эту систему активной безопасности можно отключить, в некоторых случаях деактивация даже рекомендована: например, когда Вы едете по сыпучему грунту. Однако не забывайте, что ESP – действительно полезная система, которая оказывает реальную помощь, особенно в зимних условиях. Благодаря ей аварийность уменьшилась примерно на 30%.
Что такое ABS (АБС) автомобиля?
Anti-lock Brake System, или ABS, — это активная система безопасности, которая руководит торможением транспортного средства в сложных дорожных условиях (мокрый асфальт, скользкое покрытие и др. ).
).
Предшественники современной системы появились еще в 60–70-х годах XIX века. Их можно было встретить в таких машинах, как Линкольн, Jenssen FF, Мерседес W116, БМВ 7.
Из чего состоит АБС и каков принцип ее работы?
Конструкция системы подразумевает наличие БУ, датчиков контроля скорости и гидравлического модулятора.
Функционирование антиблокировочной системы предполагает три этапа: сброс давления в цилиндре тормозной системы, его поддержание и повышение до нужного уровня. На деле это выглядит так:
- При торможении датчики скорости передают данные БУ.
- БУ плавно уменьшает скорость авто.
Если одно из колес стало скользить или полностью остановилось, датчик информирует об этом БУ, который задействует выпускной клапан. Он закрывает жидкости доступ в тормозной цилиндр колеса – насос сразу же начинает ее возвращение в гидроаккумулятор. Результат – блокировка снимается. Когда частота вращения колеса нормализовалось, БУ закрывает выпускной клапан и открывает клапан впускной. В результате снова начинает работать насос, но теперь он выполняет действия «в обратном порядке»: нагнетает давление в тормозной цилиндр, что позволяет притормаживать колесо. Все эти операции осуществляются очень быстро. Они повторяются до полной остановки транспортного средства.
В результате снова начинает работать насос, но теперь он выполняет действия «в обратном порядке»: нагнетает давление в тормозной цилиндр, что позволяет притормаживать колесо. Все эти операции осуществляются очень быстро. Они повторяются до полной остановки транспортного средства.
Что это дает?
При экстренном торможении машины, которые оснащены АБС, замедляют ход плавно, а не идут юзом. Следовательно, даже в сложных дорожных условиях машина остается управляемой. Водителю же нужно только следить за направлением движения авто до полной его остановки. Иными словами, антиблокировочная система обеспечивает управляемое торможение, что позволяет избежать аварии.
При экстренном торможении транспортного средства, не оборудованного ABS, сильное нажатие на педаль тормоза приводит к тому, что, как бы Вы ни выкручивали руль, машина не изменит своей траектории. Это связано с тем, что заблокированные колеса будут скользить и не позволят водителю маневрировать. Как результат, автомобиль поедет по прямой, что может привести к серьезным последствиям.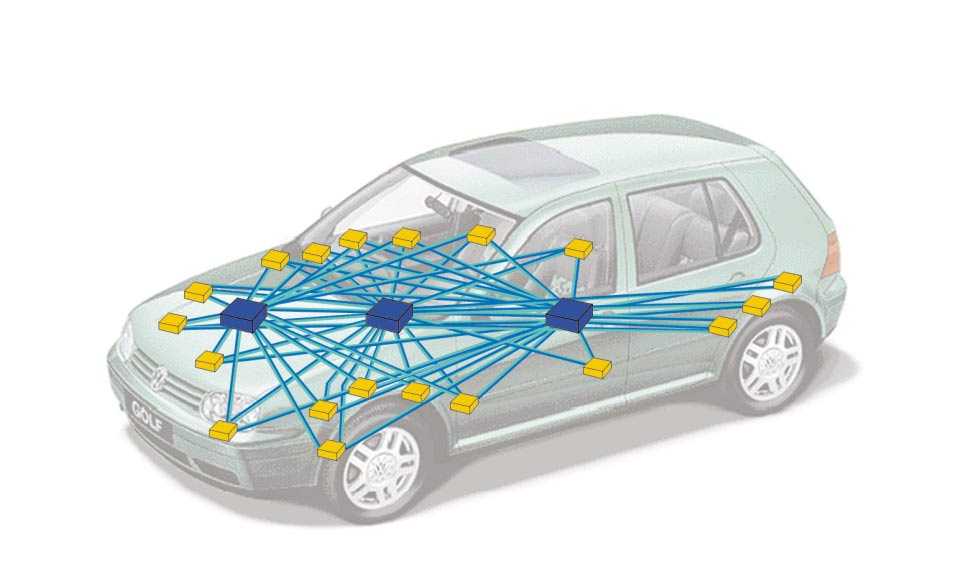
Нюансы, о которых стоит знать
Следует помнить, что системы активной безопасности помогают водителю в сложной ситуации, а не берут на себя управление автомобилем, поэтому автолюбителю не стоит расслабляться – он должен быть готов ко всему.
Системы активной безопасности автомобиля: виды и особенности
С момента выпуска первого авто прошло больше 100 лет.
Еще 25-30 лет назад ABS устанавливалась только на элитных автомобилях. Сегодня антиблокировочная система предусмотрена в минимальной комплектации даже на машинах бюджетного класса. Какие же устройства относятся к категории систем активной безопасности? В чем особенности узлов? Как они работают?
- Основные. Главное отличие устройств — полная автоматизация работы. Они включаются без ведома водителя и выполняют задачу по снижению риска попадания в ДТП;
- Дополнительные. Такие системы включаются и отключаются водителем. Сюда относится парктроник, круиз-контроль и прочие.
ABS (Anti-block Braking System)
Аббревиатура ABS известна даже малоопытным автолюбителям. Это система, отвечающая за тормоза и гарантирующая остановку автомобиля без блокировки колес.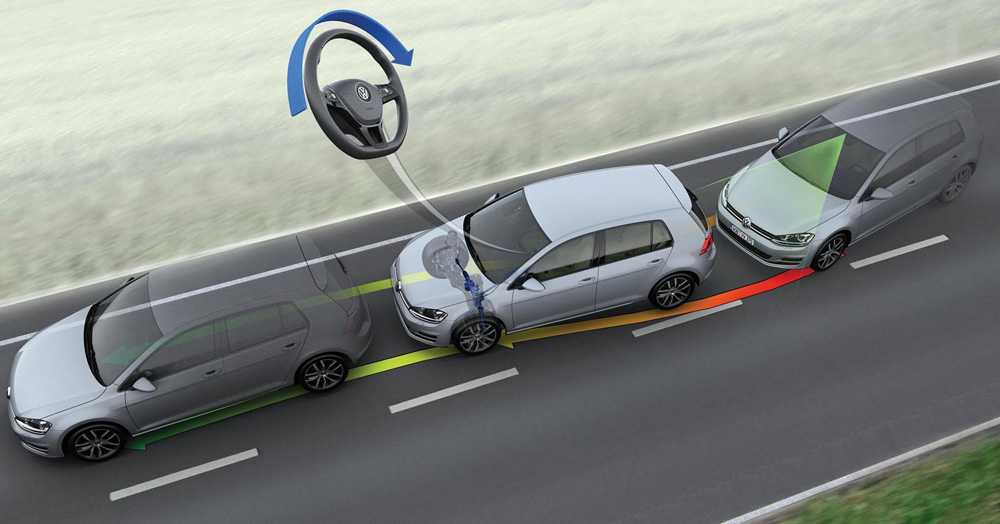 Впоследствии именно АБС стала основой для разработки других узлов активной безопасности.
Впоследствии именно АБС стала основой для разработки других узлов активной безопасности.
Задача антиблокировочной системы — сохранить управляемость автомобиля при резком нажатии на тормоз и движении по скользкой поверхности. Первые наработки устройство появились в 70-х годах прошлого столетия. Впервые АБС была установлена на авто марки Мерседес-Бенц, но со временем к применению системы перешли остальные производители. Популярность ABS обусловлена способностью сокращать тормозной путь и, как следствие, повышать безопасность движения.
Принцип действия АБС основан на корректировке давления тормозной жидкости в каждом из контуров тормозов. Электронные «мозги» машины собирают информацию датчиков и анализируют ее в режиме онлайн. Как только колесо перестает проворачиваться, информация идет к главному процессору, и АБС действует.
Первое, что происходит — срабатывают клапаны, снижающие уровень давления в нужном контуре. Благодаря этому, блокированное ранее колесо перестает фиксироваться. Как только цель достигнута, клапаны закрываются и поднимают давление в контурах тормозов.
Как только цель достигнута, клапаны закрываются и поднимают давление в контурах тормозов.
Процесс открытия и закрытия клапанов имеет циклический характер. В среднем устройство срабатывает до 10-12 раз в секунду. Как только нога снимается с педали или машина выезжает на «твердую» поверхность, происходит отключение АБС. Понять, что устройство сработало, несложно — это ощутимо по слегка уловимой пульсации, передаваемой от педали тормоза ноге.
Системы ABS нового образца гарантируют прерывистое торможение и контролируют тормозное усилие для всех осей. Обновленная система получила название EBD (о ней пойдет речь ниже).
Пользу ABS переоценить невозможно. С ее помощью появляется шанс избежать столкновения на скользкой дороге и принять правильное решение при маневре. Но имеются у данной системы активной безопасности и ряд недостатков.
Недостатки системы ABS- При срабатывании ABS водитель как бы «выключается» из процесса — работу берет на себя электроника. Что остается человеку за рулем, так это удерживать педаль нажатой.
- Даже новые АБС работают с запаздыванием, которое обусловлено необходимостью анализа ситуации и сбора информации с датчиков. Процессор должен опросить контролирующие органы, провести анализ и раздать команды. Все это происходит за доли секунды. В условиях гололедицы этого достаточно, чтобы кинуть машину в занос.
- ABS требует периодического контроля, что сделать в условиях гаражного ремонта почти невозможно.
EBD (Electronic Brake Force Distribution)
Наряду с АБС устанавливается и другая система активной безопасности, управляющая тормозными усилиями автомобиля. Задача устройства — регулировать уровень давления в каждом из контуров системы, управлять тормозами на задней оси. Это обусловлено тем, что в момент нажатия на тормоз центр тяжести переходит к передней оси, а зад автомобиля разгружен. Чтобы обеспечить контроль над машиной, блокировка передних колес должна происходить раньше, чем задних.
Принцип действия ЕБД почти идентичен с описанной ранее АБС. Разница только в том, что давление тормозной жидкости на задних колесах меньше. Как только колеса сзади блокируются, происходит сброс давления клапанами до минимального значения. Как только начинается вращение колес, происходит закрытие клапанов и рост давления. Стоит также отметить, что ЕБД и АБС работаю в паре, и дополняют друг друга.
Разница только в том, что давление тормозной жидкости на задних колесах меньше. Как только колеса сзади блокируются, происходит сброс давления клапанами до минимального значения. Как только начинается вращение колес, происходит закрытие клапанов и рост давления. Стоит также отметить, что ЕБД и АБС работаю в паре, и дополняют друг друга.
ASR (Automatic Slip Regulation)
В процессе эксплуатации часто приходится проезжать неблагоприятные участки дороги. Так, сильная грязь или гололедица не дает колесу «зацепиться» за поверхность и происходит пробуксовка. В такой ситуации в работу вступает антипробуксовочная система, устанавливаемая в большей части на внедорожниках и машинах 4х4.
Автолюбители часто путаются в названиях системы активной безопасности, которые часто отличаются. Но разница только аббревиатурах, а принцип действия неизменен. Основа ASR — антиблокировочная тормозная система. Одновременно с этим АСР способна регулировать тягу силового узла и управлять блокировкой дифференциала.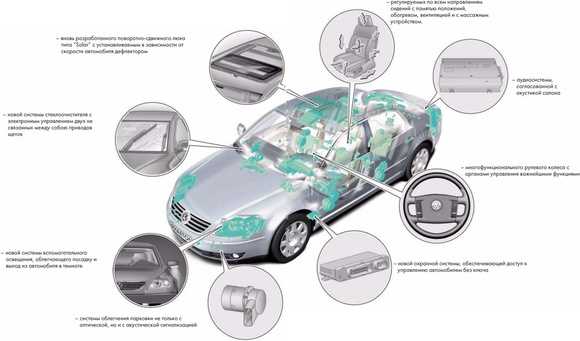
Как только происходит пробуксовка любого из колес, узел его блокирует и заставляет вращаться другое колесо этой же оси. На скорости, превышающей 80 километров в час регулирование происходит путем изменения угла открытия заслонки дросселя.
Главное отличие ASR от рассмотренных выше узлов — контроль большего числа датчиков — скорости вращения, разницы угловых скоростей и так далее. Что касается управления, то оно происходит по схожему с блокировкой принципу действия.
От модели (марки) машины зависит функциональность антипробусковочной системы и принципы управления. Так, ASR способна управлять углом опережения заслонки дросселя, тягой мотора, углом впрыска горючей смеси, программой переключения скоростей и так далее. Активация происходит при помощи специального тумблера (кнопки).
Антипробуксовочная система не обошлась и без минусов:- При начале пробуксовки к работе подключаются тормозные накладки. Это приводит к необходимости частой замены узлов (они изнашиваются быстрее). Мастера рекомендуют владельцам автомобилей с ASR тщательней контролировать толщину накладок и вовремя менять изношенные узлы.
- Система антипробуксовки сложна в обслуживании и наладке, поэтому для помощи стоит обращаться к профессионалам.
 Мастера рекомендуют владельцам автомобилей с ASR тщательней контролировать толщину накладок и вовремя менять изношенные узлы.
Мастера рекомендуют владельцам автомобилей с ASR тщательней контролировать толщину накладок и вовремя менять изношенные узлы.ESP (Electronic Stability Program)
Одна из главных задач производителя — обеспечить управляемость даже при сложных дорожных условиях. Именно для этих целей разработана система курсовой стабилизации. У устройства много названий, которое у каждого производителя свое. У одних это система стабилизации, у других — курсовой устойчивости. Но такая разница не должна путать опытного автолюбителя, ведь принцип остается неизменен.
Задача ESP — обеспечить управляемость машины при отклонении транспорта от прямолинейной траектории. Система реально работает, что сделало ее популярной в сотнях стран мира. Более того, ее установка на машинах, выпущенных в США и Европе, стала обязательной. Узел берет на себя задачу стабилизации движения при совершении маневра, резком нажатии на тормоза, разгоне и так далее.
ESP — «мозговой центр», включающий в себя дополнительную электронику, которая уже рассматривалась выше (ЕБД, АБС, АСР и прочую). Контроль автомобиля реализуется на базе работы датчиков — бокового ускорения, поворота вала руля и прочих.
Еще одна функция ESP — способность управлять тягой силового узла и коробкой-автомат. Устройство анализирует ситуацию и самостоятельно определяет, когда она переходит в разряд критической. При этом устройство следит за правильностью действий водителя и текущей траекторией. Как только манипуляции водителя расходятся с требованиями касательно действий в аварийной обстановке, в работу включается ЕСП. Она исправляет ошибки и удерживает машину на дороге.
ESP работает по-разному (здесь все зависит от ситуации). Это может быть изменение оборотов мотора, торможение колес, изменение угла поворота, корректировка жесткости элементов подвески. Тем же подтормаживанием колес система добивается исключения заноса или увода машины к обочине. При повороте машины по дуге происходит торможение заднего колеса, расположенного ближе к центру дороги. Одновременно с этим меняются и обороты силового узла. Комплексное действие ESP удерживает машину на дороге и дает уверенности водителю.
Одновременно с этим меняются и обороты силового узла. Комплексное действие ESP удерживает машину на дороге и дает уверенности водителю.
В процессе работы ESP подключает и другие системы — предотвращения столкновения, управления экстренным торможением, блокировки дифференциала и так далее. Главная опасность ESP — создание у водителей ложного чувства безнаказанности за ошибки. Но халатное отношение к дороге и полное возложение надежд на современные системы до добра не доводит. Какой бы современной ни была система, она не способна управлять — это делает человек за рулем. Система ESP способна убрать огрехи.
Brake Assistant
Устройство экстренного торможения — узел, обеспечивающий безопасность движения. Работает устройство по следующему алгоритму:
- Датчики контролируют ситуацию и распознают преграду. При этом анализируется текущая скорость движения.
- Водитель получает сигнал опасности.
- При бездействии со стороны водителя система сам дает команду на торможение.

В процессе работы ЕСП контролирует и задействует ряд механизмов. В частности, контролируется сила давления на педаль тормоза, обороты двигателя и прочие аспекты.
Дополнительные помощникиК вспомогательным системам активной безопасности стоит отнести:
- Перехват рулевого управления
- Круиз-контроль — опция, позволяющая поддерживать фиксированную скорость
- Распознавание животных
- Помощь во время подъема или спуска
- Распознавание на дороге велосипедистов или пешеходов
- Распознавание усталости водителя и так далее.
Системы активной безопасности автомобиля созданы для помощи водителю на дороге. Но не стоит слепо доверять автоматике. Важно помнить, что 95% успеха зависит от навыков автомобилиста. Только 5% «доделывает» автоматика.
Системы активной безопасности автомобиля
Сегодня мы поговорим про системы активной безопасности автомобилей, так как практические уже каждое современное авто обладает такими системами, но не многие покупатели автомобилей про них знают.
В такт с развитием электронной техники и цифровых технологий до неузнаваемости изменился и автомобиль.
Технологии не стоят на месте
И если всего каких-то 20-30 лет назад антипробуксовочная система была непременным атрибутом автомобилей премиум-класса, то сегодня она идет уже в минимальной комплектации на многих марках бюджетных автомобилей.
Сегодня львиная доля электронных систем в автомобиле так или иначе входит в набор так называемой, активной безопасности.
Эти электронные системы помогут неопытному водителю удержать автомобиль на своей траектории, преодолеть крутые спуски и подъемы, осуществить безаварийную парковку и даже объехать препятствие без заноса при экстренном торможении.
Более того, многие современные электронные системы «научились» следить за «мертвой зоной», боковым интервалом и дистанцией, они могут распознавать разметку, дорожные знаки и даже пешеходов, пересекающих дорожное полотно.
Мы уже частично затрагивали эту тему в статье современные системы автопилота.
Но и это далеко не исчерпывающий список вспомогательных электронных систем. Для комфортабельного движения по загородным дорогам многие автомобили оснащены системами адаптивного круиз-контроля.
Именно благодаря им водитель может взять своеобразный тайм-аут и следить лишь за дорогой, а все остальное, включая соблюдение дистанции, траекторию движения и управление дроссельной заслонкой будет делать электроника.
А если водитель слишком расслабился или даже задремал, его разбудит электронная система, следящая за поведением водителя.
Похоже, что будущее, когда автомобиль станет еще и авто-управляемым, совсем близко? Может быть.
Но, пока у электронных систем есть не только почитатели, но и противники.
Они утверждают, что обилие электронных систем лишь мешает водителю проявить себя, а в ряде случаев электроника даже усугубляет положение.
Прежде, чем вставать на сторону тех или других, следует сначала разобраться как работают электронные системы безопасности, каких неприятностей они помогают избежать и в каких случаях они бывают «бессильны».
ABS (Anti-block Braking System)
Антиблокировочная система торможения.
Именно под этой аббревиатурой принято скрывать ту самую антиблокировочную систему, которая не только стала первым электронным помощником водителя, но и послужила основой для создания на ее базе многих других электронных систем активной безопасности.
Сама антиблокировочная система препятствует полной блокировке колес при торможении и оставляет автомобиль управляемым даже на скользком покрытии.
Впервые подобная система была установлена на автомобили Mercedes-Benz еще в начале 70-х годов прошлого века.
Современная антиблокировочная система существенно сокращает тормозной путь при срочном торможении на скользком дорожном покрытии.
Принцип работы современной системы ABS заключается в циклах сброса и подъема давления тормозной жидкости в контурах, ведущих к исполнительным механизмам колес.
Электроника управляет клапанами, получая информацию от датчиков вращения колес.
При прекращении вращения какого-либо из колес, электронные импульсы от датчика перестают передаваться на центральный процессор.
Сразу же в действие включаются электромагнитные клапаны, сбрасывающие давление, заблокированное колесо растормаживается, после чего клапаны снова закрываются, поднимая давление в тормозных контурах.
Этот процесс проходит циклически, с частотой около 8 — 12 циклов подъема и сброса давления в секунду, пока водитель удерживает педаль тормоза.
Водитель ощущает работу АБС по пульсирующему биению тормозной педали.
Современные антиблокировочные системы позволяют не только осуществлять так называемое прерывистое торможение, но и управлять тормозными усилиями колес на каждой оси в зависимости от их проскальзывания. Эта система называется EBD, но о ней мы поговорим позже.
Недостатки АБС.
Но, у каждой медали имеется еще и обратная сторона.
Главная проблема любой АБС заключается в том, что электроника практически полностью заменяет водителя в управлении торможением, оставляя ему лишь пассивно нажимать на педаль.
Система включается в работу с некоторым запаздыванием, поскольку для оценки тормозных усилий и состояния дорожного покрытия процессору нужно время.
Обычно это доли секунды, но как показывает практика, очень часто их хватает на то, чтобы автомобиль вошел в занос.
Также АБС может сыграть с водителем еще одну злую шутку на скользком покрытии. Все дело в том, что на скоростях движения меньше 10 км/ч АБС автоматически отключается.
Читайте по теме: Неисправности ABS.
Это означает, что, если водитель успел сбросить скорость до значения ниже порога отключения системы в условиях очень скользкой дороги, а впереди него препятствие в виде столба, отбойника или стоящий автомобиль, вероятнее всего, водитель будет удерживать педаль тормоза нажатой.
А это легко может обернуться в условиях гололедицы мелким дорожно-транспортным происшествием.
Именно в момент отключения вспомогательной системы водитель должен брать на себя полное управление торможением.
Также непросто прокачать тормоза с АБС, здесь нужны определенная сноровка и знания.
EBD (Electronic Brake Force Distribution)
Электронная система распределения тормозных усилий.
По сути, она является усовершенствованной антиблокировочной системой активной безопасности.
В отличие от АБС, которая в циклическом режиме сбрасывает и поднимает давление в тормозных контурах, система EBD способна управлять тормозными усилиями на задней оси, поскольку при торможении центр тяжести автомобиля смещается на переднюю.
Задняя ось при этом остается практически разгруженной. Для сохранения управляемости автомобиля колеса передней оси должным блокироваться раньше, чем задней.
Работа системы EBD практически ничем не отличается от ABS. Единственное отличие — это удержание системой рабочего давления в тормозных контурах задних колес заведомо ниже, чем в передних.
При блокировке задних колес клапаны сбрасывают давление до еще более низкого значения.
При повышении скорости вращения задних колес клапаны закрываются и давление вновь нарастает.
Система работает в сочетании с ABS и является ее дополняющей частью.
Она пришла на замену знаменитому «колдуну» — механическому регулятору тормозных сил, отключающего тормозные контуры задних колес в зависимости от наклона кузова автомобиля.
ASR (Automatic Slip Regulation)
Антипробуксовочная система.
Эта электронная система активной безопасности предназначена для недопущения пробуксовки ведущих колес автомобиля.
В настоящее время она устанавливается на многие современные автомобили, включая полноприводные кроссоверы и внедорожники.
У многих автопроизводителей антипробуксовочная система может иметь разные названия. Но принцип работы практически одинаков и основывается на работе антиблокировочной системы торможения.
Также ASR включает в себя системы управления электронной блокировкой дифференциала и регулированием тяги двигателя.
Принцип ее работы базируется на кратковременной блокировке буксующего колеса и перебрасывания крутящего момента на другое колесо на этой же оси на низких скоростях движения.
На высокой (свыше 80 км/ч) скорости движения, пробуксовка регулируется при помощи регулировки угла открытия дроссельной заслонки.
В отличие от ABS и EBD система ASR при считывании показаний датчиков скорости вращения колес сравнивает не только стоящее и вращающееся колесо, но также и разницу угловых скоростей, ведущих и ведомых.
Управление кратковременной блокировкой ведущих колес осуществляется по аналогичному циклическому принципу.
В зависимости от марки и модели автомобиля, система ASR способна управлять тяговым усилием двигателя при помощи изменения угла открытия дроссельной заслонки, блокирования впрыска топлива, изменения угла опережения впрыска топлива в дизеле или угла опережения зажигания, а также управление программной алгоритма переключения передач роботизированной или автоматической коробки передач.
Активируется с помощью кнопки.
Недостатки ASR.
Одним из существенных недостатков этой системы является постоянное задействование тормозных накладок при пробуксовке ведущих колес.
Это означает, что они будут изнашиваться намного быстрее, чем тормозные накладки обычного автомобиля, не оборудованного ASR.
Поэтому, владелец автомобиля, часто использующий антипробуксовочную систему должен гораздо тщательнее следить за толщиной рабочего слоя на тормозных накладках.
Система курсовой стабилизации (Electronic Stability Program)
Электронная система курсовой устойчивости (стабилизации).
В настоящее время у многих автопроизводителей эта система называется по-разному.
Одни автопроизводители называют ее «системой стабилизации движения». Другие — «системой курсовой устойчивости». Но суть ее работы от этого практически не меняется.
Как следует из ее названия, эта электронная система активной безопасности предназначена для сохранения управляемости и стабилизации движения автомобиля в случае отклонения от прямолинейной траектории движения.
С некоторого времени оснащение автомобилей системой ESP наряду с ABS является обязательным в США, а также в Европе.
Система способна стабилизировать траекторию движения автомобиля при его разгоне, торможении, а также маневрировании.
Собственно, ESP является «интеллектуальной» электронной системой, обеспечивающей безопасность на более высоком уровне.
Она включает в себя все другие электронные системы (ABS, EBD, ASR и др.) и следит за наиболее эффективной и слаженной их работой.
«Глазами» ESP являются не только датчики скорости вращения колес, но также датчики величины давления в главном тормозном цилиндре, датчики поворота вала рулевого колеса и датчики фронтального и бокового ускорения автомобиля.
Кроме этого, ESP управляет тягой двигателя и автоматической трансмиссией. Система сама определяет наступление критической ситуации, следя за адекватностью действий водителя и траекторией движения автомобиля.
В ситуации, когда действия водителя (нажатие педалей, вращение рулевого колеса) отличаются от траектории движения автомобиля (благодаря наличию датчиков), система включается в работу.
В зависимости от вида аварийной ситуации, ESP будет стабилизировать движение при помощи притормаживания колес, управления оборотами двигателя и даже углом поворота передних колес и жесткостью амортизаторов (при наличии систем активного подруливания и управления подвеской).
Подтормаживая колеса, ESP препятствует возникновению заноса и увода автомобиля в сторону при прохождении крутых поворотов.
Например, при неадекватной траектории движения при прохождении поворота с малым радиусом, ESP подтормаживает внутреннее заднее колесо, изменяя при этом обороты двигателя, что способствует удержанию автомобиля на заданной траектории.
Крутящий момент двигателя регулирует система ASR.
В полноприводных автомобилях крутящий момент в трансмиссии регулируется при помощи межосевого дифференциала.
Современная система ESP может опираться на работу других систем: управления экстренным торможением (Brake Assistant), системы предотвращения столкновения (Braking Guard), а также электронной блокировки дифференциала (EDS).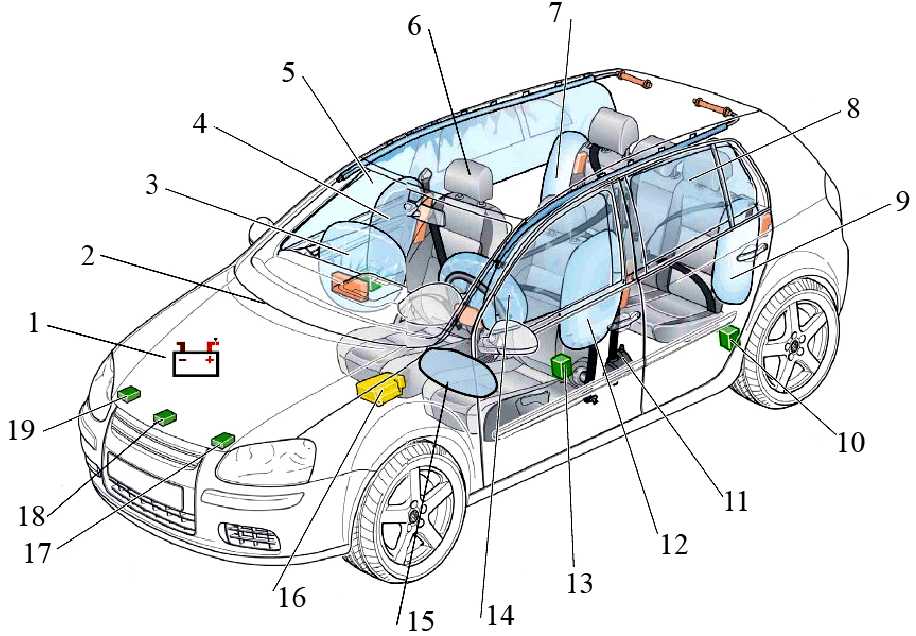
При эксплуатации автомобиля, оборудованного интеллектуальной электронной системой курсовой устойчивости владельцу автомобиля необходимо помнить о более интенсивном износе тормозных дисков и накладок.
А также о психологическом моменте — фальшивом чувстве безопасности, которое заключается в том, что все ошибки водителя при выборе скорости движения, недооценке скользкого покрытия или дистанции до движущегося впереди автомобиля ESP способна своевременно устранить.
Ведь несмотря на все более совершенствующиеся электронные системы активной безопасности водительское мастерство и ответственность за собственную жизнь и жизни пассажиров пока еще никто не отменял.
Именно это правило следует помнить всегда, даже при езде в компании электронных помощников.
Ключевые технологии системы активной безопасности транспортных средств на основе компьютерного зрения
В связи с увеличением количества городского транспорта и нестандартным поведением водителей во время вождения участились городские аварии, приводящие к серьезным человеческим жертвам и экономическим потерям. Системы активной безопасности транспортных средств могут отслеживать состояние транспортного средства и состояние водителя онлайн в режиме реального времени. Технология компьютерного зрения имитирует биологическое зрение и может анализировать, идентифицировать, обнаруживать и отслеживать данные и информацию на захваченных изображениях. Что касается предупреждения о дорожно-транспортном происшествии и предупреждения о состоянии транспортного средства, система активной безопасности транспортного средства может повысить способность водителя обнаруживать нештатные ситуации, увеличивать время обработки и снижать риск несчастных случаев, связанных с безопасностью. В этой статье активная система безопасности разработана в соответствии с существующей структурой электронной системы транспортного средства, а решение о раннем предупреждении принимается путем оценки взаимосвязи между минимальным расстоянием раннего предупреждения и фактическим расстоянием до транспортного средства, скоростью и другими факторами.
Системы активной безопасности транспортных средств могут отслеживать состояние транспортного средства и состояние водителя онлайн в режиме реального времени. Технология компьютерного зрения имитирует биологическое зрение и может анализировать, идентифицировать, обнаруживать и отслеживать данные и информацию на захваченных изображениях. Что касается предупреждения о дорожно-транспортном происшествии и предупреждения о состоянии транспортного средства, система активной безопасности транспортного средства может повысить способность водителя обнаруживать нештатные ситуации, увеличивать время обработки и снижать риск несчастных случаев, связанных с безопасностью. В этой статье активная система безопасности разработана в соответствии с существующей структурой электронной системы транспортного средства, а решение о раннем предупреждении принимается путем оценки взаимосвязи между минимальным расстоянием раннего предупреждения и фактическим расстоянием до транспортного средства, скоростью и другими факторами. В данной работе разработана кинематическая модель системы раннего оповещения активной безопасности транспортного средства. Результаты показали, что в пределах 400 мс времени принятия решения водителем для водителя со временем реакции 0,6 с и 0,9с, расстояние в 20 м не представляет угрозы безопасности, и торможение не требуется.
В данной работе разработана кинематическая модель системы раннего оповещения активной безопасности транспортного средства. Результаты показали, что в пределах 400 мс времени принятия решения водителем для водителя со временем реакции 0,6 с и 0,9с, расстояние в 20 м не представляет угрозы безопасности, и торможение не требуется.
1. Введение
Компьютерное зрение разрабатывалось почти 60 лет. Как прикладная система, компьютерное зрение постепенно развивается по мере развития автоматизации предприятия. Сегодня мировой рынок машинного зрения оценивается примерно в 7-8 миллиардов долларов и ежегодно растет на 8,8%. С развитием обрабатывающей промышленности Китая растет и спрос на компьютерное зрение в Китае. В связи с быстрым ростом числа владельцев транспортных средств и увеличением числа дорожно-транспортных происшествий в последние годы все большее внимание уделяется активным системам безопасности транспортных средств. Анализ причин дорожно-транспортных происшествий, проведенный службой управления дорожным движением, показывает, что основными причинами дорожно-транспортных происшествий по-прежнему являются превышение скорости, вождение в нетрезвом виде и управление утомлением, а подсознательная скорость водителя в прогнозировании и реагировании на чрезвычайные ситуации относительно низкая. Он более уязвим в чрезвычайных ситуациях. Анализ большого количества дорожно-транспортных происшествий также показывает, что более 80% транспортных средств происходят по вине медлительных водителей, а более 65% дорожно-транспортных происшествий являются авариями. Система активной безопасности транспортного средства может непрерывно отслеживать окружающую среду и условия движения перед транспортным средством, обеспечивать раннее предупреждение о возможных препятствиях при обычном вождении, а также выполнять экстренное торможение и автоматизацию транспортного средства в аварийных ситуациях для обеспечения безопасности объекта. и транспортное средство.
Он более уязвим в чрезвычайных ситуациях. Анализ большого количества дорожно-транспортных происшествий также показывает, что более 80% транспортных средств происходят по вине медлительных водителей, а более 65% дорожно-транспортных происшествий являются авариями. Система активной безопасности транспортного средства может непрерывно отслеживать окружающую среду и условия движения перед транспортным средством, обеспечивать раннее предупреждение о возможных препятствиях при обычном вождении, а также выполнять экстренное торможение и автоматизацию транспортного средства в аварийных ситуациях для обеспечения безопасности объекта. и транспортное средство.
С повышением уровня жизни людей безопасность транспортных средств привлекает все большее внимание общественности, а также становится конкурентным преимуществом различных автогигантов. Одним из лучших инструментов для решения проблем безопасности автомобиля является система активной безопасности автомобиля. Активная безопасность автомобиля отличается от пассивной безопасности автомобиля. Это система предупреждения о безопасности, которая может предотвратить несчастные случаи до столкновения, напомнить водителям о необходимости своевременно принять превентивные меры, компенсировать медленную реакцию водителя и обеспечить безопасность. Исследования технологий безопасности транспортных средств являются основным направлением исследований будущего интеллектуального транспорта и интеллектуального вождения транспортных средств. Технология визуальной безопасности транспортных средств более ценна с точки зрения экономики и технологий.
Это система предупреждения о безопасности, которая может предотвратить несчастные случаи до столкновения, напомнить водителям о необходимости своевременно принять превентивные меры, компенсировать медленную реакцию водителя и обеспечить безопасность. Исследования технологий безопасности транспортных средств являются основным направлением исследований будущего интеллектуального транспорта и интеллектуального вождения транспортных средств. Технология визуальной безопасности транспортных средств более ценна с точки зрения экономики и технологий.
В зависимости от различных условий движения и торможения движущегося впереди транспортного средства модель мониторинга транспортного средства классифицируется и анализируется с использованием принципов кинематики и динамики. Он исследует влияние и адаптируемость системных параметров с трех аспектов: человек-транспортное средство-окружающая среда. Траектории представляют собой объединенные карты признаков, использующие признаки значимости направления и признаки значимости цвета для идентификации дорожек. Он анализирует трудности, с которыми сталкивается обнаружение полос движения, и взвешивает характерные особенности цвета и направления линий полос движения в процессе обнаружения, чтобы подчеркнуть их значимость в процессе сегментации изображения.
Он анализирует трудности, с которыми сталкивается обнаружение полос движения, и взвешивает характерные особенности цвета и направления линий полос движения в процессе обнаружения, чтобы подчеркнуть их значимость в процессе сегментации изображения.
Чтобы повысить безопасность дорожного движения, Чанг предложил систему обнаружения сонливости на основе смарт-очков. Система состоит из пары носимых смарт-очков, бортовой информационно-развлекательной телематической платформы, диагностического моста на основе бортовой диагностики II, активного механизма предупреждения о задних фонарях и облачной платформы управления. Он также предложил и внедрил специальный миниатюрный полосовой датчик инфракрасного (ИК) света для недорогих, легких, носимых смарт-очков. Он может обеспечить более высокое отношение сигнал-шум, чем обычные коммерческие датчики инфракрасного света, свести к минимуму изображения окружающего света и эффективно повысить точность обнаружения. Система может определять сонливость или усталость водителя транспортного средства в режиме реального времени. При обнаружении сонливости или усталости механизм предупреждения об активном освещении транспортного средства автоматически мигает, чтобы предупредить следующие транспортные средства. Одновременно соответствующая информация будет передаваться на облачную платформу управления. Таким образом, предлагаемая система может повысить безопасность дорожного движения, но широкого применения не получила [1]. Для автомобильных инженеров важно понимать взаимосвязь между активным маневрированием человека и динамикой автомобиля, а также то, как органы управления транспортным средством влияют на физические ощущения водителя. Кимпара предложил новую системную структуру, систему активного вождения, основанную на модели человека (HuMADS), для моделирования взаимодействия человека с транспортным средством. HuMADS интегрирует контроллеры транспортных средств с динамикой транспортных средств и биомеханическими моделями человека. Он имеет многоуровневую замкнутую архитектуру системы управления «водитель-транспортное средство», включающую структуру и контактные интерфейсы тела человека и тела.
При обнаружении сонливости или усталости механизм предупреждения об активном освещении транспортного средства автоматически мигает, чтобы предупредить следующие транспортные средства. Одновременно соответствующая информация будет передаваться на облачную платформу управления. Таким образом, предлагаемая система может повысить безопасность дорожного движения, но широкого применения не получила [1]. Для автомобильных инженеров важно понимать взаимосвязь между активным маневрированием человека и динамикой автомобиля, а также то, как органы управления транспортным средством влияют на физические ощущения водителя. Кимпара предложил новую системную структуру, систему активного вождения, основанную на модели человека (HuMADS), для моделирования взаимодействия человека с транспортным средством. HuMADS интегрирует контроллеры транспортных средств с динамикой транспортных средств и биомеханическими моделями человека. Он имеет многоуровневую замкнутую архитектуру системы управления «водитель-транспортное средство», включающую структуру и контактные интерфейсы тела человека и тела. На основе платформы моделирования OpenSim компания HuMADS разработала систему для настройки динамики модели человеческого тела, чтобы модель человеческого тела могла реалистично реагировать на маневрирование транспортного средства. Удобство использования HuMADS демонстрируется путем моделирования согласованной работы педали акселератора/тормоза и рулевого управления в задаче вождения по шоссе. Смоделированная динамика автомобиля и управляемость автомобиля сопоставимы с ранее опубликованными экспериментальными данными по следованию автомобиля. Однако в настоящее время реализовать все аспекты сложнее [2]. Получение точного положения транспортного средства в интеллектуальной транспортной системе имеет большое значение для повышения активной безопасности и реализации автономного вождения. Стремясь устранить недостатки существующей глобальной системы позиционирования (GPS) и технологий позиционирования транспортного средства и инфраструктуры (V2I), Цао предложил новую систему позиционирования, которая сочетает в себе радиочастотную идентификацию (RFID), зрение и сверхширокополосную (UWB) связь.
На основе платформы моделирования OpenSim компания HuMADS разработала систему для настройки динамики модели человеческого тела, чтобы модель человеческого тела могла реалистично реагировать на маневрирование транспортного средства. Удобство использования HuMADS демонстрируется путем моделирования согласованной работы педали акселератора/тормоза и рулевого управления в задаче вождения по шоссе. Смоделированная динамика автомобиля и управляемость автомобиля сопоставимы с ранее опубликованными экспериментальными данными по следованию автомобиля. Однако в настоящее время реализовать все аспекты сложнее [2]. Получение точного положения транспортного средства в интеллектуальной транспортной системе имеет большое значение для повышения активной безопасности и реализации автономного вождения. Стремясь устранить недостатки существующей глобальной системы позиционирования (GPS) и технологий позиционирования транспортного средства и инфраструктуры (V2I), Цао предложил новую систему позиционирования, которая сочетает в себе радиочастотную идентификацию (RFID), зрение и сверхширокополосную (UWB) связь. Цель состоит в том, чтобы обеспечить позиционирование на уровне полосы движения в городских условиях, где влияние GPS слабое. Он проанализировал погрешность позиционирования одиночного RSU V2 в типичной ситуации. RSU — это придорожный блок, представляющий собой устройство, устанавливаемое на обочине дороги для осуществления идентификации транспортного средства в системе ETC. Результаты показывают, что система с разумным расположением RSU может обеспечить точность позиционирования с погрешностью менее 0. Однако первоначальные капиталовложения должны быть больше [3]. Автономное вождение является активной областью исследований в промышленности и научных кругах. Автоматическая парковка — это автоматическое вождение в ограниченном пространстве низкоскоростной парковки, и это ключевой вспомогательный продукт полностью автоматической системы вождения. Хаймбергер обсудил проектирование и внедрение автоматизированных систем парковки с точки зрения алгоритмов компьютерного зрения. Разработка недорогой системы с функциональной безопасностью — это сложная задача, которая приводит к большому разрыву между прототипом и конечным продуктом, позволяющим справиться со всеми крайними случаями.
Цель состоит в том, чтобы обеспечить позиционирование на уровне полосы движения в городских условиях, где влияние GPS слабое. Он проанализировал погрешность позиционирования одиночного RSU V2 в типичной ситуации. RSU — это придорожный блок, представляющий собой устройство, устанавливаемое на обочине дороги для осуществления идентификации транспортного средства в системе ETC. Результаты показывают, что система с разумным расположением RSU может обеспечить точность позиционирования с погрешностью менее 0. Однако первоначальные капиталовложения должны быть больше [3]. Автономное вождение является активной областью исследований в промышленности и научных кругах. Автоматическая парковка — это автоматическое вождение в ограниченном пространстве низкоскоростной парковки, и это ключевой вспомогательный продукт полностью автоматической системы вождения. Хаймбергер обсудил проектирование и внедрение автоматизированных систем парковки с точки зрения алгоритмов компьютерного зрения. Разработка недорогой системы с функциональной безопасностью — это сложная задача, которая приводит к большому разрыву между прототипом и конечным продуктом, позволяющим справиться со всеми крайними случаями. Это демонстрирует, что системы камер имеют решающее значение для решения ряда задач автоматизированной парковки, а также повышают надежность систем, основанных на активных датчиках дальности, таких как ультразвуковые и радарные. Ключевыми модулями технического зрения, которые позволяют использовать парковку, являются 3D-реконструкция, парковочное место, распознавание маркеров, свободное пространство и обнаружение транспортных средств/пешеходов. Он представил важные варианты использования парковки и продемонстрировал их, но практичность не была сильной [4]. Чтобы обеспечить безопасность высокоскоростных поездов, Чжао изучил метод оценки индекса опрокидывания на основе предварительно оцененной модели водителя и разработал систему прогнозирования опрокидывания транспортного средства на основе предварительно оцененной модели водителя. Для автомобилей с высоким центром тяжести он разработал динамическую модель опрокидывания с тремя степенями свободы и модель водителя. Он разработал систему прогнозирования опрокидывания, а также смоделировал и проанализировал опрокидывание в различных условиях эксплуатации, чтобы проверить эффективность системы, но исследование не является исчерпывающим [5]. Альварес в основном изучает систему помощи при удержании полосы движения (LKAS) для полноприводных электромобилей. Он предложил новый метод Lane Keeping Assist. Этот подход налагает на электромобили дополнительный рыскающий момент для удержания полосы движения за счет активного распределения 4WD/тормозного момента. Система удержания полосы движения разделена на три уровня. На верхнем уровне он принимает вспомогательные управляющие решения и рассчитывает желаемую скорость рыскания, принимая во внимание выезд с полосы движения, динамику автомобиля и ограничения сцепления с дорогой. На среднем уровне он разработал контроллер скользящего режима (SMC) для управления дополнительным моментом рыскания. На нижнем уровне момент рыскания создается путем распределения приводного/тормозного момента между четырьмя колесами. Lane Keeping Assist работает, отслеживая желаемую реакцию на рыскание. LKAS оценивается через CarSim/Simulink. Результаты моделирования теста с одной полосой движения показывают, что этот метод может обеспечить хорошую динамическую устойчивость транспортного средства и может ограничить транспортное средство в полосе движения, чтобы избежать аварий с выездом из полосы движения, но практичность невелика [6].
Это демонстрирует, что системы камер имеют решающее значение для решения ряда задач автоматизированной парковки, а также повышают надежность систем, основанных на активных датчиках дальности, таких как ультразвуковые и радарные. Ключевыми модулями технического зрения, которые позволяют использовать парковку, являются 3D-реконструкция, парковочное место, распознавание маркеров, свободное пространство и обнаружение транспортных средств/пешеходов. Он представил важные варианты использования парковки и продемонстрировал их, но практичность не была сильной [4]. Чтобы обеспечить безопасность высокоскоростных поездов, Чжао изучил метод оценки индекса опрокидывания на основе предварительно оцененной модели водителя и разработал систему прогнозирования опрокидывания транспортного средства на основе предварительно оцененной модели водителя. Для автомобилей с высоким центром тяжести он разработал динамическую модель опрокидывания с тремя степенями свободы и модель водителя. Он разработал систему прогнозирования опрокидывания, а также смоделировал и проанализировал опрокидывание в различных условиях эксплуатации, чтобы проверить эффективность системы, но исследование не является исчерпывающим [5]. Альварес в основном изучает систему помощи при удержании полосы движения (LKAS) для полноприводных электромобилей. Он предложил новый метод Lane Keeping Assist. Этот подход налагает на электромобили дополнительный рыскающий момент для удержания полосы движения за счет активного распределения 4WD/тормозного момента. Система удержания полосы движения разделена на три уровня. На верхнем уровне он принимает вспомогательные управляющие решения и рассчитывает желаемую скорость рыскания, принимая во внимание выезд с полосы движения, динамику автомобиля и ограничения сцепления с дорогой. На среднем уровне он разработал контроллер скользящего режима (SMC) для управления дополнительным моментом рыскания. На нижнем уровне момент рыскания создается путем распределения приводного/тормозного момента между четырьмя колесами. Lane Keeping Assist работает, отслеживая желаемую реакцию на рыскание. LKAS оценивается через CarSim/Simulink. Результаты моделирования теста с одной полосой движения показывают, что этот метод может обеспечить хорошую динамическую устойчивость транспортного средства и может ограничить транспортное средство в полосе движения, чтобы избежать аварий с выездом из полосы движения, но практичность невелика [6]. Javaid решает ключевую проблему автомобильной безопасности. С увеличением интенсивности дорожного движения усовершенствованные системы помощи водителю (ADAS) приобрели большую репутацию. Он представил разработку стратегии автоматического экстренного обгона (AEP) для полуавтономных транспортных средств с использованием систем активной безопасности на симуляторе вождения. Идея системы заключается в том, что движущееся транспортное средство, оснащенное системой AEP, может автоматически съехать на обочину дороги, когда водитель не может управлять автомобилем. Он изложил дизайн приложения, разработку алгоритма и структуру компонентов системы AEP. Он наблюдал все основные переменные, влияющие на поведение автомобиля после активации АЭП, и реконструировал его в соответствии с алгоритмом управления, но метод исследования недостаточно ясен [7]. Эти исследования содержат подробный анализ применения методов компьютерного зрения и автономного вождения транспортных средств. Нельзя отрицать, что эти исследования в значительной степени способствовали развитию соответствующих направлений.
Javaid решает ключевую проблему автомобильной безопасности. С увеличением интенсивности дорожного движения усовершенствованные системы помощи водителю (ADAS) приобрели большую репутацию. Он представил разработку стратегии автоматического экстренного обгона (AEP) для полуавтономных транспортных средств с использованием систем активной безопасности на симуляторе вождения. Идея системы заключается в том, что движущееся транспортное средство, оснащенное системой AEP, может автоматически съехать на обочину дороги, когда водитель не может управлять автомобилем. Он изложил дизайн приложения, разработку алгоритма и структуру компонентов системы AEP. Он наблюдал все основные переменные, влияющие на поведение автомобиля после активации АЭП, и реконструировал его в соответствии с алгоритмом управления, но метод исследования недостаточно ясен [7]. Эти исследования содержат подробный анализ применения методов компьютерного зрения и автономного вождения транспортных средств. Нельзя отрицать, что эти исследования в значительной степени способствовали развитию соответствующих направлений. Мы можем многому научиться из методологии и анализа данных. Однако исследований систем активной безопасности транспортных средств в области компьютерных технологий относительно немного, и необходимо в полной мере применить эти алгоритмы к исследованиям в этой области.
Мы можем многому научиться из методологии и анализа данных. Однако исследований систем активной безопасности транспортных средств в области компьютерных технологий относительно немного, и необходимо в полной мере применить эти алгоритмы к исследованиям в этой области.
3. Методика системы активной безопасности автомобиля на основе компьютерного зрения
3.1. Технология компьютерного зрения
Зрение — важный способ поиска информации и понимания мира. Люди получают, обрабатывают и понимают визуальную информацию через глаза и мозг. Свет, излучаемый веществами в окружающей среде, проецируется на сетчатку через глаза и после повторного введения в сетчатку и нейроны сетчатки фоторецепторными клетками затем передается в кору головного мозга по нервам для обработки и интерпретации [8]. Из-за незаменимости зрения и его большой доли в производстве и жизни человека, а также с быстрым развитием науки и техники область компьютерного зрения привлекла большое внимание и достигла значительных результатов исследований. Компьютерное зрение может быть достигнуто путем имитации человеческого зрения для создания связанной модели зрения и использования компьютерной системы для реализации бионического метода связанной модели. Появление компьютеров привело к большому прогрессу в науке и технике о человеке и создало множество новых дисциплин. Люди используют камеры или видеокамеры для захвата изображений объектов в окружающей среде и преобразования их в цифровые сигналы, а также используют компьютеры для обработки информации для создания системы компьютерного зрения [9].].
Компьютерное зрение может быть достигнуто путем имитации человеческого зрения для создания связанной модели зрения и использования компьютерной системы для реализации бионического метода связанной модели. Появление компьютеров привело к большому прогрессу в науке и технике о человеке и создало множество новых дисциплин. Люди используют камеры или видеокамеры для захвата изображений объектов в окружающей среде и преобразования их в цифровые сигналы, а также используют компьютеры для обработки информации для создания системы компьютерного зрения [9].].
Компьютерное зрение, также известное как машинное зрение, представляет собой науку и технологию, использующую компьютеры для имитации биологического вида и макроскопических зрительных функций. Основной целью анализа компьютерного зрения является использование плоских изображений для создания или реконструкции моделей реального мира, то есть изучение способов использования двухмерных изображений для реконструкции трехмерного визуального мира и последующей идентификации мира [10]. Теоретические методы, используемые в компьютерном зрении, в основном представляют собой теорию компьютерного зрения, основанную на геометрии, вероятности, трехмерном движении и расчетах реконструкции. Самой большой особенностью технологии компьютерного зрения является высокая скорость, большой объем информации и множество функций.
Теоретические методы, используемые в компьютерном зрении, в основном представляют собой теорию компьютерного зрения, основанную на геометрии, вероятности, трехмерном движении и расчетах реконструкции. Самой большой особенностью технологии компьютерного зрения является высокая скорость, большой объем информации и множество функций.
Анализ компьютерного зрения в основном включает три аспекта: (1) Измерение расстояния от целевого объекта до одного или нескольких двумерных изображений. (2) Рассчитать модель движения целевого объекта на основе одного или нескольких двумерных проекционных изображений. (3) Рассчитать физические свойства целевой поверхности на основе одного или нескольких двумерных проекционных изображений [11]. Конечная цель компьютерного зрения — понять трехмерное представление о мире, аналогичную функцию зрительной системы человека. Суть исследования заключается в воссоздании видимой части трехмерного объекта с помощью двумерного проецируемого изображения. Компьютерное зрение все еще находится в основном на стадии выражения информации изображения и распознавания объектов.
При анализе систем зрения датчики расстояния часто используются для объединения информации, которая может напрямую получать информацию о глубине и решать многие проблемы со зрением. В настоящее время системы компьютерного зрения можно условно разделить на четыре категории в зависимости от их применения: системы мониторинга, системы распознавания, системы обнаружения и системы наведения, как показано на рисунке 1 [12].
3.2. Система раннего предупреждения о безопасности людей, транспортных средств и окружающей среды
Транспортные средства, движущиеся по дороге, водители, транспортные средства и дорожное движение вместе составляют типичную систему дорожного движения, состоящую из троицы человек-транспортное средство-дорога. Безопасное вождение транспортного средства совместно ограничивается факторами дороги, транспортного средства и водителя [13]. Хотя водитель является ключевым фактором в системе дорожного движения и играет ведущую роль в обеспечении безопасности движения, существует большая ошибка в визуальной оценке водителем расстояния между передними и задними транспортными средствами, а способность реагирования гораздо менее точна, чем система.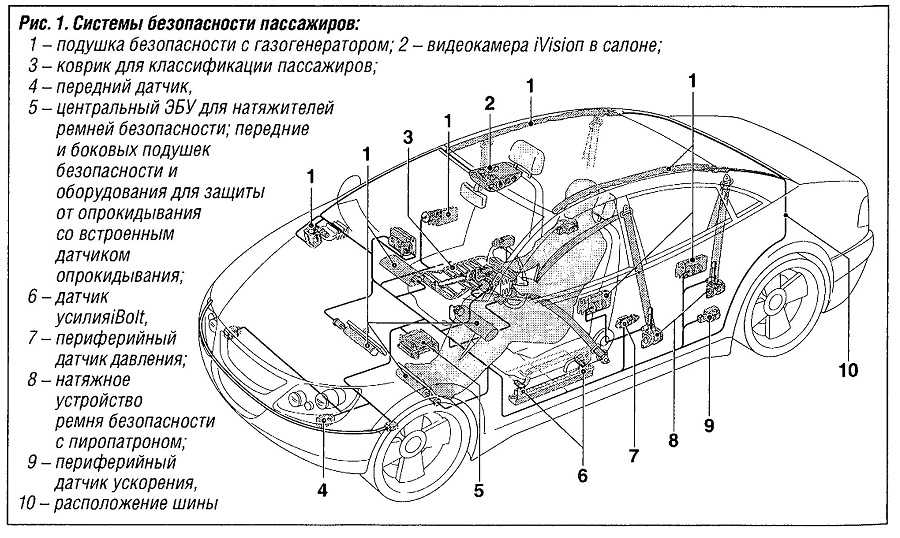 Таким образом, система предупреждения о столкновении с активной безопасностью транспортного средства является хорошим помощником для обеспечения безопасного вождения водителя и всегда сопровождает безопасное вождение транспортного средства.
Таким образом, система предупреждения о столкновении с активной безопасностью транспортного средства является хорошим помощником для обеспечения безопасного вождения водителя и всегда сопровождает безопасное вождение транспортного средства.
Системы активной безопасности транспортных средств имеют широкий спектр применения; сам автомобиль имеет антиблокировочную тормозную систему (ABS), электронную систему рулевого управления (MDPS), систему предупреждения об экстренном торможении (ESS) и систему помощи при экстренном торможении (EBA). Функция антиблокировочной тормозной системы заключается в автоматическом управлении тормозным усилием тормозов при торможении автомобиля таким образом, чтобы колеса не блокировались и находились в состоянии качения и пробуксовки (пробуксовка составляет около 20 %). Он обеспечивает максимальное сцепление колеса с грунтом [14]. Тормозная система состоит из следующих четырех основных компонентов: (1) Устройство подачи энергии: оно включает в себя различные компоненты, которые подают и регулируют энергию, необходимую для торможения, и улучшают среду передачи энергии. Часть, которая генерирует энергию торможения, называется энергией торможения. (2) Устройство управления: оно включает в себя различные компоненты, которые создают тормозное действие и контролируют тормозной эффект. Механизм педали тормоза является простейшим типом управляющего устройства. (3) Трансмиссионное устройство: оно включает в себя различные компоненты, передающие тормозную энергию тормозу, такие как главный тормозной цилиндр (главный цилиндр) и тормозной колесный цилиндр (колесный цилиндр). (4) Тормоз: это компонент, создающий усилие (тормозное усилие), препятствующее движению или движению транспортного средства, и включающий замедляющие устройства во вспомогательной тормозной системе. Более полная тормозная система теперь также включает в себя устройства регулировки тормозного усилия и дополнительные устройства, такие как устройства сигнализации и устройства защиты от давления. Системы предупреждения о выходе из полосы движения (LDWS), системы предупреждения о торможении, наружные камеры автомобиля и другие приложения являются частью системы активной безопасности автомобиля, обеспечивающей безопасное вождение.
Часть, которая генерирует энергию торможения, называется энергией торможения. (2) Устройство управления: оно включает в себя различные компоненты, которые создают тормозное действие и контролируют тормозной эффект. Механизм педали тормоза является простейшим типом управляющего устройства. (3) Трансмиссионное устройство: оно включает в себя различные компоненты, передающие тормозную энергию тормозу, такие как главный тормозной цилиндр (главный цилиндр) и тормозной колесный цилиндр (колесный цилиндр). (4) Тормоз: это компонент, создающий усилие (тормозное усилие), препятствующее движению или движению транспортного средства, и включающий замедляющие устройства во вспомогательной тормозной системе. Более полная тормозная система теперь также включает в себя устройства регулировки тормозного усилия и дополнительные устройства, такие как устройства сигнализации и устройства защиты от давления. Системы предупреждения о выходе из полосы движения (LDWS), системы предупреждения о торможении, наружные камеры автомобиля и другие приложения являются частью системы активной безопасности автомобиля, обеспечивающей безопасное вождение. Более 90% дорожно-транспортных происшествий происходит по невнимательности водителей. Вот почему система предупреждения о столкновении автомобиля является наиболее важной из систем активной безопасности автомобиля. Он состоит из двух частей: пассивной безопасности и активной безопасности [15].
Более 90% дорожно-транспортных происшествий происходит по невнимательности водителей. Вот почему система предупреждения о столкновении автомобиля является наиболее важной из систем активной безопасности автомобиля. Он состоит из двух частей: пассивной безопасности и активной безопасности [15].
3.2.1. Пассивная безопасность автомобилей
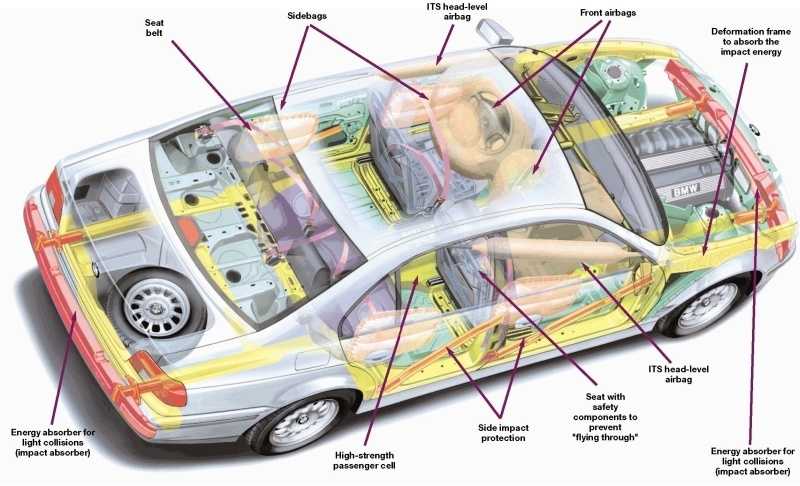
Пассивная система безопасности автомобилей ориентирована на защиту пассажиров транспортного средства после аварии, например, подушки безопасности, ремни безопасности, взрывозащищенные окна, складные рулевые колонки и характерно усиленный кузов [16] .
3.2.2. Активная безопасность автомобиля
Активная безопасность автомобиля — это уникальная система, предназначенная для предотвращения опасных аварий во время вождения, которая значительно снижает количество аварий за счет упреждающего оповещения пассажиров автомобиля или принятия мер для защиты пассажиров до того, как произойдет авария, таких как ABS, EBD, HMWS. , ASR, SAS, ACC, TCS, ESP и VSA.
3.3. Технология определения полосы движения
Активные системы безопасности обеспечивают безопасность пассажиров во время вождения до того, как произойдет авария. Особенности системы активной безопасности автомобиля заключаются в следующем: повышение устойчивости автомобиля при движении и попытка предотвратить автомобильные аварии. Полосы описывают ряд сегментов транспортного средства, по которому движется транспортное средство, а разные маршруты делятся на разные полосы. Технология определения полосы движения в основном используется для прогнозирования расстояния до транспортных средств и подходит для структурированных маршрутов с четкими линиями. На практике положение транспортного средства относительно головы транспортного средства отслеживается в режиме реального времени, чтобы получить положение транспортного средства в полосе движения и оценить, выходит ли транспортное средство из полосы движения [17]. Водители мгновенно уведомляются об устранении ненормального вождения, предотвращении несчастных случаев и обеспечении безопасного вождения. Обнаружение полосы движения в значительной степени зависит от технологии машинного зрения.
Обнаружение полосы движения в значительной степени зависит от технологии машинного зрения.
В последние годы исследования системы предотвращения столкновений активной безопасности транспортных средств в основном разделены на три основные части: Европу, Японию и Китай, и также были достигнуты замечательные достижения. Всесторонний анализ каждой системы показывает, что выбранные датчики в основном гидроакустические, ультразвуковые, инфракрасные, лидарные, радары миллиметрового диапазона, микроволновые радары, машинное зрение и так далее. Его основная функция заключается в распознавании изображений, измерении расстояния, измерении скорости и расчете безопасного расстояния до автомобиля. Его основной принцип работы, преимущества и недостатки сравниваются в таблице 1.
Обнаружение полосы движения на структурированных дорогах в основном основано на отличительных цветовых особенностях линий разметки для идентификации, а во-вторых, обнаружение точки схода также выполняется с использованием направления текстуры дороги для определения направления смены полосы движения. Распознавание по цвету имеет высокую производительность в режиме реального времени и позволяет быстро отделить положение линии маркировки. Однако надежность слабая, а метод на основе текстуры хорошо адаптируется к ряду нарушений в изображении. Однако для достижения лучшего эффекта обнаружения необходимо использовать исходное изображение для свертки разнонаправленных шаблонов, соответственно, что требует большого объема вычислений. Если шаблон ориентации и масштаб уменьшены, эффективный результат первичной сегментации не может быть получен [1].
Распознавание по цвету имеет высокую производительность в режиме реального времени и позволяет быстро отделить положение линии маркировки. Однако надежность слабая, а метод на основе текстуры хорошо адаптируется к ряду нарушений в изображении. Однако для достижения лучшего эффекта обнаружения необходимо использовать исходное изображение для свертки разнонаправленных шаблонов, соответственно, что требует большого объема вычислений. Если шаблон ориентации и масштаб уменьшены, эффективный результат первичной сегментации не может быть получен [1].
Чтобы решить эти проблемы, в этой статье предлагается метод обнаружения, который использует комбинацию характеристик цветовой заметности и направленности. Он использует две идентифицируемые характеристики: цвет и направление сигнальной линии. Он помечает цветной признак и объединяет признаки направления, чтобы разделить положение сигнальной линии, затем вычитает характерные точки отмеченного ряда и изменяет кандидатов, чтобы получить площадь дорожки [18], как показано на рисунке 2.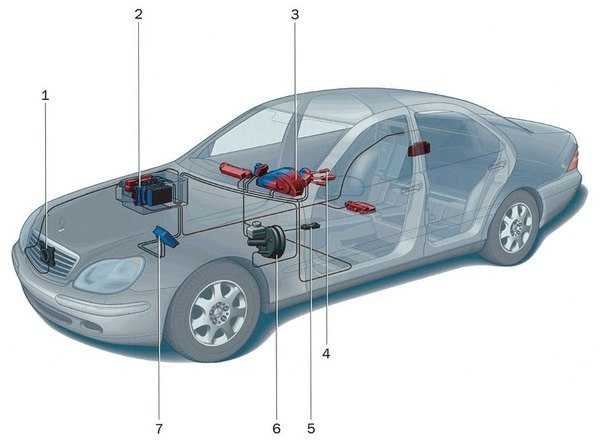
3.3.1. Преобразование Габора
Когда предполагается, что оконная функция является функцией Гаусса, преобразование Габора является кратковременным преобразованием Фурье, которое является частным случаем кратковременного преобразования Фурье. Поскольку функция Габора обрабатывает результаты в соответствии с системой зрительного восприятия человека, она может извлекать соответствующие признаки различных масштабов и направлений в частотной области. Это частный случай кратковременного преобразования Фурье [19]. Gabor используется для улучшения тонких особенностей ориентации и масштаба, а его формат ответа выделяет те же локально важные функции, что и желаемая ориентация, что позволяет создать карту локальных характеристик, характеризуемую яркостными изображениями. В последние годы фильтрация Габора широко используется для распознавания лиц и отпечатков пальцев. Функция ядра Габора может извлекать соответствующие функции в разных масштабах и направлениях. Двумерная функция Габора обычно может быть выражена как где-то, где представляет собой масштаб различных длин волн, представляет направление функции ядра, L представляет собой общее количество всех выбранных направлений, а параметр определяет размер окна Гаусса.
Это также может быть выражено в следующей форме:
Среди них и представляют положение фильтра в пространстве, представляют длину короткой оси гауссовой огибающей, представляют длину длинной оси гауссовой огибающей, представляют центр частота фильтра и представляет направление фильтра.
Согласно теореме о свертке, если вы хотите вычислить свертку двух функций в пространственном поле, вы можете сначала выполнить над ними преобразование Фурье. Затем он умножает результаты преобразования Фурье двух функций и, наконец, выполняет преобразование Фурье над результатом умножения. Свертка в пространственной области эквивалентна умножению преобразования Фурье в частотной области и наоборот. Преобразование Габора является частным случаем кратковременного преобразования Фурье. Когда оконная функция является функцией Гаусса, ее также можно использовать в качестве модели свертки при обработке изображений.
Для направления и масштаба выражение функции фильтра Габора выглядит следующим образом:где
Различные масштабы и направления могут давать разные результаты в процессе свертки. Крупномасштабные шаблоны могут выделять границы с большими областями и игнорировать границы с меньшими областями. С другой стороны, мелкомасштабные шаблоны в основном выделяют детализированные текстуры. Шаблоны в разных направлениях соответствуют большим значениям отклика текстуры в одном и том же направлении изображения, тогда как отклики текстуры в разных направлениях меньше.
Крупномасштабные шаблоны могут выделять границы с большими областями и игнорировать границы с меньшими областями. С другой стороны, мелкомасштабные шаблоны в основном выделяют детализированные текстуры. Шаблоны в разных направлениях соответствуют большим значениям отклика текстуры в одном и том же направлении изображения, тогда как отклики текстуры в разных направлениях меньше.
3.3.2. Извлечение признаков направления линии переулка
Функция ядра Габора используется для преобразования признаков текстуры для максимизации признаков ориентации текстуры. В процессе обнаружения пути требуется обнаружение обхода текстуры, поэтому необходимо добавить больше направленных паттернов. Это создает большую вычислительную проблему, но из-за принципа перспективы числовые линии, полученные в представлении пути, всегда пересекаются в определенной точке. Согласно этой паре признаков, две числовые линии, которые на самом деле параллельны, показывают пересечение и . Функция ядра фильтра Габора для направления и масштаба дана в формуле (6).
Для отмеченной линии выберите функцию ядра Габора двух шкал, свернутых в двух направлениях и , и пусть будет значением точки на рисунке. есть свертка ядра Габора в направлении и масштабе , как определено формулой (7).
Результат свертки точки делится на две части: действительную часть и мнимую часть. Чтобы более четко учесть направленность, значение отклика принимается как сумма квадратов действительной и мнимой частей, как показано в формуле (9).).
Значение отклика в определенном направлении определяется как сумма результатов преобразования различных шкал в этом направлении. Для получения двух шкал одинаково берется среднее значение результатов разных шкал, как показано в формуле (10).
3.3.3. Генерация карты заметности с определенным цветовым взвешиванием
Небольшое рецептивное поле в центральной части сетчатки человека более чувствительно к интенсивности света, цвету и другим элементам информации, в то время как периферическая часть сетчатки относительно нечувствительна. Плотность выборки и визуальное разрешение человеческого глаза уменьшаются по мере удаления от центральной части сетчатки, где информация вокруг сетчатки сильно сжата [20]. Напротив, при взгляде на что-либо объект, который первым накапливается в центральной рецептивной области сетчатки, называется видимой целью. На изображении видные объекты должны быть сняты крупным планом, чтобы получить больше информации, в то время как другие части не являются областями интереса, и их информация может быть сжата. Это механизм зрительного внимания, который представляет собой процесс выбора выделяющихся объектов, поскольку наше зрение ограничено [21].
Плотность выборки и визуальное разрешение человеческого глаза уменьшаются по мере удаления от центральной части сетчатки, где информация вокруг сетчатки сильно сжата [20]. Напротив, при взгляде на что-либо объект, который первым накапливается в центральной рецептивной области сетчатки, называется видимой целью. На изображении видные объекты должны быть сняты крупным планом, чтобы получить больше информации, в то время как другие части не являются областями интереса, и их информация может быть сжата. Это механизм зрительного внимания, который представляет собой процесс выбора выделяющихся объектов, поскольку наше зрение ограничено [21].
Предположим, что изображение содержит n цветов; сначала вычислите цветовую гистограмму изображения, поскольку обычно изображение содержит ограниченное количество объектов. Следовательно, содержащиеся в нем цвета составляют лишь малую часть общего цветового пространства, используемого алгоритмом. Поэтому для уменьшения количества вычислений и влияния цвета шума на результат алгоритм будет удалять цвет, занимающий малую часть цвета в изображении, то есть убирать возможный цветовой шум [22].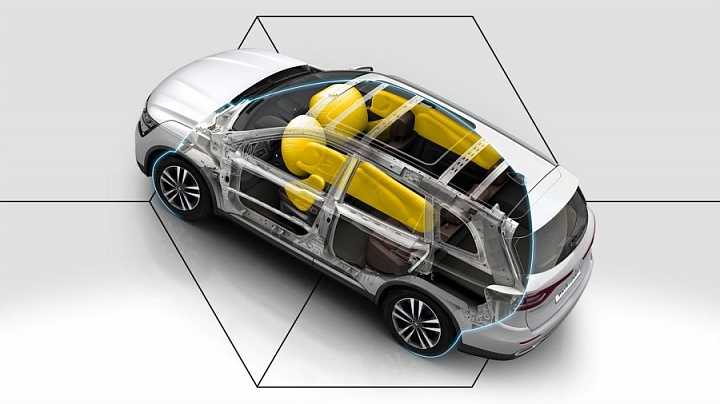 Наконец, он выбирает основной цвет изображения, чтобы заменить цвет менее частых пикселей рядом с гистограммой. Предположим, что после замены осталось n цвета, обозначенные как , где обозначены белый и желтый. Затем, в соответствии с известными свойствами белых и желтых линий этикетки, ожидаемое значение вокруг двух значений цвета C соответствует нормальному распределению, а значения после улучшения цвета следующие: где
Наконец, он выбирает основной цвет изображения, чтобы заменить цвет менее частых пикселей рядом с гистограммой. Предположим, что после замены осталось n цвета, обозначенные как , где обозначены белый и желтый. Затем, в соответствии с известными свойствами белых и желтых линий этикетки, ожидаемое значение вокруг двух значений цвета C соответствует нормальному распределению, а значения после улучшения цвета следующие: где
Среди них вес позиции цвет . Чтобы усилить влияние цвета на более близкие пиксели, в качестве пикселя задается расстояние между цветом и фактически рассчитанным .
3.3.4. Saliency Map Fusion
Пусть C — цветовая карта значимости, а T — направленная карта значимости. Карта значимости с цветовым взвешиванием и карта направленной значимости должны быть объединены для дальнейшего выделения маркерных линий [23]. Во-первых, взвешенная по цвету карта значимости и карта направленной значимости нормализуются в соответствии с формулой (13), где представляют максимальное и минимальное значения на карте значимости соответственно.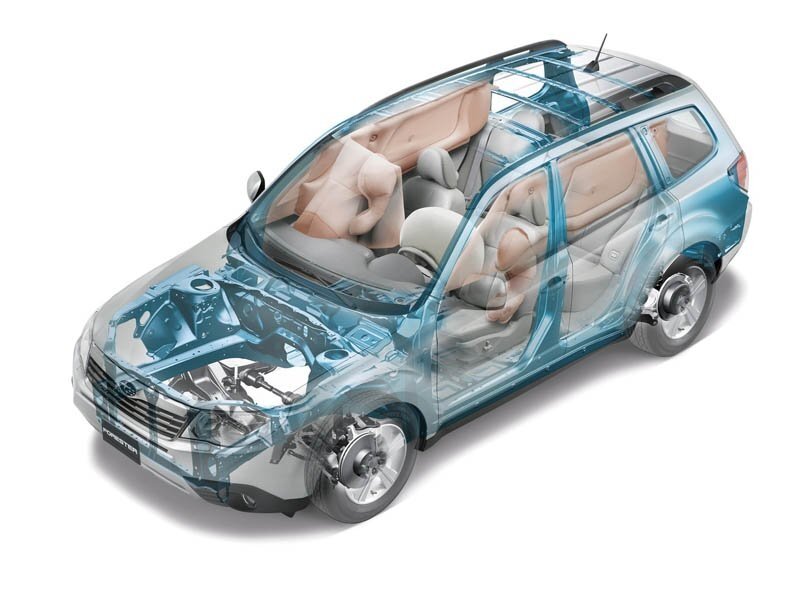
На этой основе общая карта заметности получается путем слияния двух.
Путем бинаризации выделяющихся изображений можно получить сегментированное изображение. Поскольку центр изображения, полученного с помощью автомобильной камеры, должен располагаться посередине двух отмеченных линий, поиск начинается с центральной линии изображения и в качестве области интереса выбирается 1/3 близкого расстояния карты заметности. . И он разделяет две характерные точки разметки полосы движения, определенные в [24].
Если предположить, что параметрическая формула, соответствующая объекту, равна , ошибка, соответствующая целевой линии любой характерной точки, равна . Сумма квадратов ошибок, соответствующих всем характерным точкам, равна 9.0003
Функция, которая делает формулу (15) минимальным значением, является требуемым параметром прямой линии, как показано в формулах (16) и формуле (17). Результат подгонки линии дорожки показан на рисунке 3.
3.4. Распознавание изображений препятствий, таких как люди и автомобили
Распознавание изображений относится к технологии, которая использует компьютеры для обработки, анализа и понимания изображений для идентификации целей и объектов в различных шаблонах. И он выполняет серию методов улучшения и реконструкции изображений с низким качеством, чтобы эффективно улучшить качество изображения. Технология распознавания изображений позволяет компьютеру имитировать человеческий мозг и иметь определенную функцию памяти для изображений, хранящихся в компьютере. Методы распознавания изображений могут основываться на основных характеристиках изображения. Каждый образ имеет свои характеристики. В процессе распознавания образов перцептивный механизм должен исключить избыточную информацию на входе и извлечь ключевую информацию. Целью обработки и обнаружения изображения является окончательное распознавание изображения. И распознавание изображений находится в центре внимания исследований систем активной безопасности транспортных средств. Это необходимое условие для предупреждения о безопасности автомобиля и предотвращения столкновений. Способность системы автоматически определять на изображении такие препятствия, как транспортные средства и пешеходы, определяет функционирование и качество системы.
И он выполняет серию методов улучшения и реконструкции изображений с низким качеством, чтобы эффективно улучшить качество изображения. Технология распознавания изображений позволяет компьютеру имитировать человеческий мозг и иметь определенную функцию памяти для изображений, хранящихся в компьютере. Методы распознавания изображений могут основываться на основных характеристиках изображения. Каждый образ имеет свои характеристики. В процессе распознавания образов перцептивный механизм должен исключить избыточную информацию на входе и извлечь ключевую информацию. Целью обработки и обнаружения изображения является окончательное распознавание изображения. И распознавание изображений находится в центре внимания исследований систем активной безопасности транспортных средств. Это необходимое условие для предупреждения о безопасности автомобиля и предотвращения столкновений. Способность системы автоматически определять на изображении такие препятствия, как транспортные средства и пешеходы, определяет функционирование и качество системы. В процессе распознавания изображений системы необходимо различать транспортные средства и пешеходов впереди и различать их в соответствии с их соответствующими формами, контурными особенностями, такими как формы и точки интереса, методом распознавания образов, моделью сопоставления шаблонов и методом распознавания изображений. в зависимости от характеристик человека и автомобиля.
В процессе распознавания изображений системы необходимо различать транспортные средства и пешеходов впереди и различать их в соответствии с их соответствующими формами, контурными особенностями, такими как формы и точки интереса, методом распознавания образов, моделью сопоставления шаблонов и методом распознавания изображений. в зависимости от характеристик человека и автомобиля.
Система распознавания образов в основном включает три категории: низкоуровневая обработка, промежуточная обработка и высокоуровневая обработка. Он в основном получает изображения через датчик CCD. В процессе предварительной обработки изображения, обработки, сегментации изображения, описания и выражения он непрерывно обучает классификатор посредством распознавания изображений, сравнивает его с моделью памяти в базе знаний и, наконец, достигает процесса распознавания. Его структурный состав показан на рис. 4.9.0003
Распознавание изображений делится на контролируемое и неконтролируемое распознавание.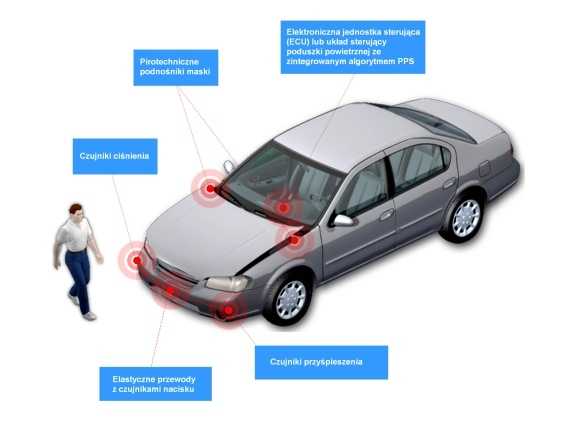 Основное различие между ними заключается в том, известна ли заранее категория, к которой принадлежит каждый экспериментальный образец. Он использует предварительные знания и навыки обучения для создания контролируемого классификатора, в то время как распознавание, использующее сходство векторов распознавания для автоматической классификации, не контролируется. На рис. 5 показан тренажер распознавания изображений, созданный методом контролируемого распознавания.
Основное различие между ними заключается в том, известна ли заранее категория, к которой принадлежит каждый экспериментальный образец. Он использует предварительные знания и навыки обучения для создания контролируемого классификатора, в то время как распознавание, использующее сходство векторов распознавания для автоматической классификации, не контролируется. На рис. 5 показан тренажер распознавания изображений, созданный методом контролируемого распознавания.
В базу знаний классификатора обучения распознаванию изображений помещается информация о контурах изображений препятствий, таких как люди и транспортные средства, находящиеся перед впереди идущим транспортным средством. Новая информация об изображении сравнивается с исходной информацией об изображении шаблона, независимо от того, получена ли она из таких характеристик, как контур поверхности, размер и ширина, или в соответствии с информацией об изображении препятствий и их соответствующих точек интереса. Он выполняет нечеткие рассуждения в соответствии с сходством изображений и, наконец, оценивает степень принадлежности каждого изображения.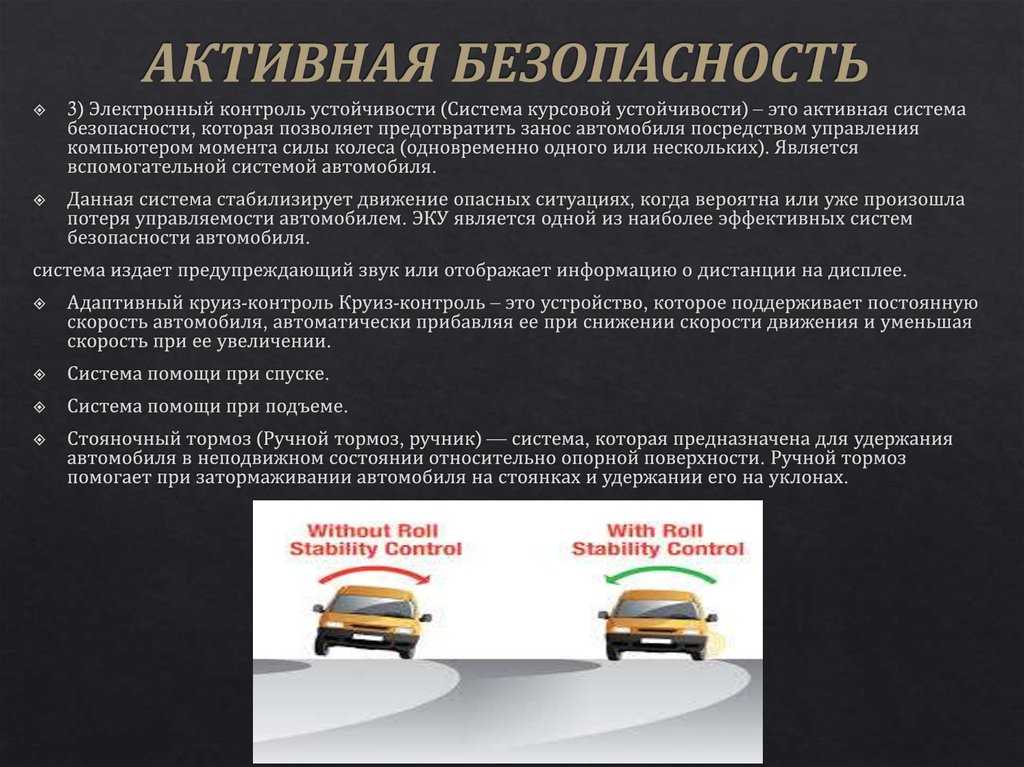
4. Экспериментальный проект системы активной безопасности транспортного средства
В кинематической модели, созданной системой предупреждения об активной безопасности транспортного средства, расстояние предупреждения о безопасности транспортного средства и расстояние автоматического торможения необходимо определять отдельно в соответствии с различными условиями и условиями работы. Есть много соответствующих факторов, и их следует всесторонне учитывать, чтобы получить данные, соответствующие конкретному фактическому процессу, и тогда они имеют прикладную ценность. Основными параметрами, которые необходимо определить, являются скорость двух транспортных средств, замедление, время реакции водителя, время координации торможения и время увеличения торможения торможением, а также безопасное расстояние между конечной остановкой и безопасное расстояние вождения. Эти элементы связаны с ранним предупреждением транспортного средства, своевременным торможением и может ли транспортное средство реализовать функцию предотвращения столкновений. Модель раннего предупреждения с учетом дорожных условий и состояния водителя показана на рисунке 6.9.0003
Модель раннего предупреждения с учетом дорожных условий и состояния водителя показана на рисунке 6.9.0003
4.1. Скорость переднего и заднего транспортных средств
Проблема скорости транспортного средства играет жизненно важную роль в системе активной безопасности предотвращения столкновений транспортных средств. Возникновение дорожно-транспортных происшествий, серьезных последствий и больших потерь связано с высокой скоростью. Скорость переднего и заднего транспортных средств необходимо ввести в систему предупреждения об активной безопасности для расчета. Скорость автомобиля фиксируется датчиком скорости, установленным возле колеса. Скорость впереди идущего автомобиля определяется посредством измерения скорости двумя стереокамерами с ПЗС, но скорость представляет собой относительную скорость двух автомобилей, а именно , чтобы получить скорость автомобиля впереди. Относительная скорость переднего и заднего транспортных средств также является прямым ответом на уровень опасности транспортного средства, поэтому важно контролировать относительную скорость между транспортными средствами.
4.2. Время реакции водителя, время координации торможения и увеличение времени замедления при торможении
В нормальных условиях время реакции водителя сильно различается из-за различий в возрасте, поле, настроении и т. д., а также степени различия во времени реакции между людьми. тоже большой.
5. Анализ данных системы активной безопасности автомобиля
5.1. Влияние времени реакции водителя на решение о раннем предупреждении
Скорость реагирования водителей разного возраста в отношении самого водителя различна, как показано на рис. 7. Время реакции водителя с возрастом уменьшалось.
Из рисунка 7 видно, что время принятия водителем решения находится в пределах 400 мс, а время реакции водителя практически одинаково для водителей разного пола в зависимости от их физического состояния. Влияние внешней среды затянет время реакции водителя. Например, когда водитель находится за рулем в нетрезвом виде, его реакция сильно снижается, и чаще всего происходят дорожно-транспортные происшествия, что также является причиной того, что ГИБДД строго расследует и наказывает «управление в нетрезвом виде». Существует также усталость водителя от вождения, и явление засыпания во время вождения очень опасно.
Существует также усталость водителя от вождения, и явление засыпания во время вождения очень опасно.
Пройденное расстояние увеличивается с увеличением скорости автомобиля и разницы скоростей. В целом, требуется большее расстояние между автомобилями для обеспечения безопасности друг друга на трассе. Большая разница скоростей не только снижает пропускную способность дороги, но и создает большую угрозу безопасности. Согласно разным расстояниям между транспортными средствами результаты анализа моделирования транспортных средств, следующих за моделями с максимальной скоростью 100 км/ч и разницей скоростей 45 км/ч и 60 км/ч соответственно, иллюстрируют вывод, как показано на Рисунок 8.
В соответствии с формулой модели движения можно получить фактическое расстояние, расстояние раннего предупреждения и кривую изменения скорости в реальном времени. Предположим, что впереди идущее транспортное средство 1 и следующее за ним транспортное средство 2 движутся с постоянной скоростью 18 м/с, а расстояние между ними составляет 20 м. В момент времени t = 1 с транспортное средство 1 замедляется с ускорением 6 м/с2. На рис. 9 показаны минимальное расстояние предупреждения и скорость в реальном времени, когда время реакции водителя составляет 0,3 с, 0,6 с и 0,9 с соответственно.
В момент времени t = 1 с транспортное средство 1 замедляется с ускорением 6 м/с2. На рис. 9 показаны минимальное расстояние предупреждения и скорость в реальном времени, когда время реакции водителя составляет 0,3 с, 0,6 с и 0,9 с соответственно.
Из рисунка 9 видно, что для водителей с временем реакции 0,6 с и 0,9 с дистанция следования составляет 20 м, что не представляет угрозы безопасности, и торможение не требуется. Однако для водителя со временем реакции 0,9 с дистанция следования в 20 м уже является угрозой, требующей раннего предупреждения и торможения. Если один и тот же метод принятия решений по раннему предупреждению используется для разных водителей, это повлияет на доверие водителя к системе раннего предупреждения и приведет к тому, что водитель потеряет доверие к системе раннего предупреждения, что приведет к тому, что система раннего предупреждения не будет работать должным образом. Чтобы адаптироваться к привычкам вождения и физиологической скорости реакции разных водителей, добавление времени реакции водителя к системе раннего предупреждения может повысить точность раннего предупреждения системы раннего предупреждения.
5.2. Влияние дорожных условий на принятие решений по раннему предупреждению
Предположим, что скорость движущегося впереди транспортного средства 1 и транспортного средства 2, идущего сзади, составляет 20 м/с, скорость постоянна, а расстояние между двумя транспортными средствами составляет 20 м; при t = 1 с первое транспортное средство замедляется с ускорением 6 м/с 2 . Ускорение автомобиля В определяется состоянием дорожного покрытия , является пиковым коэффициентом сцепления, и его значение равно 0,3, 0,7 и 1,0. Минимальное расстояние предупреждения и скорость в реальном времени показаны на рисунке 10 и в таблицах 2 и 3.
Из рисунка 10 и таблиц 2 и 3 видно, что для дорожного покрытия с пиковыми коэффициентами сцепления 0,7 и 1,0 дистанция следования не представляет угрозы безопасности, когда дистанция следования транспортного средства составляет 20 м, а торможение отсутствует. требуется операция. Однако для дороги с пиковым коэффициентом сцепления 0,3 дистанция следования в 20 м уже является угрозой, требующей раннего предупреждения и торможения.
6. Заключение
Хотя компьютерное зрение получило много исследований и разработок, вычислительная мощность компьютерного зрения все еще очень наивна по сравнению с человеческим зрением. Во многих случаях компьютерное зрение по-прежнему ограничено вычислительной мощностью компьютера и не может соответствовать требованиям реального времени и точности. В современном обществе транспортные средства играют важную роль в обеспечении мобильности и перевозки товаров, и люди все больше полагаются на них. С бурным развитием общественного хозяйства количество транспортных средств быстро увеличивается. Дорожно-транспортные происшествия также становятся все более серьезными с увеличением количества транспортных средств, что становится серьезной угрозой для современного общества. Таким образом, безопасность вождения является важной заботой современного общества, а безопасность транспортных средств и мониторинг состояния транспортных средств являются одними из важных показателей для измерения эффективности транспортных средств. В этой статье используется упрощенная линейная модель для соответствия обнаруженным линиям дорожек. Хотя это может обеспечить лучшее обнаружение линий полосы движения, на некоторых изогнутых полосах результаты обнаружения оказывают определенное влияние на предупреждение о выходе из полосы движения.
В этой статье используется упрощенная линейная модель для соответствия обнаруженным линиям дорожек. Хотя это может обеспечить лучшее обнаружение линий полосы движения, на некоторых изогнутых полосах результаты обнаружения оказывают определенное влияние на предупреждение о выходе из полосы движения.
Доступность данных
Данные, подтверждающие результаты этого исследования, можно получить у соответствующего автора по обоснованному запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Copyright © 2022 Mingzhu Qian and Xiaobao Wang. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Средства активной безопасности в автомобилях — все, что вам нужно знать
Термин «безопасность» неразрывно связан с каждой машиной в мире. Элементы безопасности автомобиля не так заметны, как другие более привлекательные элементы. Тем не менее, они играют важную роль в успехе любого транспортного средства, поскольку никто не любит покупать небезопасную машину. В наши дни люди больше, чем когда-либо, обеспокоены безопасностью своего автомобиля, как и должно быть. За последние пару десятилетий автомобильная промышленность продемонстрировала значительный прогресс в показателях безопасности и характеристиках автомобилей как для пассажиров, так и для пешеходов.
Элементы безопасности автомобиля не так заметны, как другие более привлекательные элементы. Тем не менее, они играют важную роль в успехе любого транспортного средства, поскольку никто не любит покупать небезопасную машину. В наши дни люди больше, чем когда-либо, обеспокоены безопасностью своего автомобиля, как и должно быть. За последние пару десятилетий автомобильная промышленность продемонстрировала значительный прогресс в показателях безопасности и характеристиках автомобилей как для пассажиров, так и для пешеходов.
Кроме того, в наши дни проверки безопасности автомобилей, такие как программа оценки новых автомобилей (NCAP), оценивают автомобили, проверяя их по нескольким параметрам безопасности. Доступные сегодня функции безопасности можно разделить на два типа: функции активной безопасности и функции пассивной безопасности. Здесь мы поговорим о функциях активной безопасности.
Активные функции безопасности снижают вероятность несчастных случаев, предупреждая водителя или помогая ему управлять автомобилем. В автомобили, доступные сегодня, интегрированы различные функции активной безопасности, давайте пройдемся по ним по порядку.
В автомобили, доступные сегодня, интегрированы различные функции активной безопасности, давайте пройдемся по ним по порядку.
Антиблокировочная тормозная система (ABS)
ABS предотвращает блокировку колес автомобиля при торможении. Если колеса блокируются, когда водитель нажимает на педаль тормоза, это может привести к повреждению автомобиля двумя способами. Во-первых, внезапная остановка может привести к повреждению тормозов и многих других компонентов автомобиля, а внезапное изменение скорости может также повредить пассажирам. Во-вторых, внезапно заблокированное колесо может привести к заносу автомобиля, если сцепление шин с дорогой меньше требуемого. ABS регулирует усилие, прилагаемое водителем к педали тормоза, в соответствии с тяговым контактом с поверхностью и не допускает блокировки колес.
Электронный контроль устойчивости (ESC)
ESC — это компьютеризированная технология, которая определяет изменение сцепления между автомобилем и дорогой и автоматически включает тормоза для облегчения процесса рулевого управления. Это происходит, когда водитель теряет контроль над рулевым управлением. При автоматическом торможении на каждое колесо подается тормозное усилие, необходимое для предотвращения заноса автомобиля. Некоторые ESC также уменьшают подачу энергии от двигателя до восстановления контроля над автомобилем.
Это происходит, когда водитель теряет контроль над рулевым управлением. При автоматическом торможении на каждое колесо подается тормозное усилие, необходимое для предотвращения заноса автомобиля. Некоторые ESC также уменьшают подачу энергии от двигателя до восстановления контроля над автомобилем.
Адаптивный круиз-контроль
Адаптивный круиз-контроль — это сенсорная система, которая снижает и увеличивает скорость автомобиля в заданном диапазоне, чтобы удерживать его на безопасном расстоянии от других транспортных средств на дороге.
Система контроля давления в шинах (TPMS)
Система контроля давления в шинах представляет собой электронную систему, которая определяет давление воздуха в шинах автомобиля в режиме реального времени. Информация о давлении в шинах в режиме реального времени передается водителю с помощью манометра, дисплея с пиктограммами или любой сигнальной лампы.
Предупреждение о выходе из полосы движения
Система предупреждения о выходе из полосы движения предупреждает водителя, если транспортное средство начинает покидать свою полосу движения. Эта функция удобна в основном на городских дорогах и автомагистралях и предотвращает столкновения с транспортными средствами на других полосах движения.
Эта функция удобна в основном на городских дорогах и автомагистралях и предотвращает столкновения с транспортными средствами на других полосах движения.
Проекционный дисплей (HUD)
Проекционный дисплей представляет собой небольшую прозрачную стеклянную панель, закрепленную на приборной панели с удобным обзором водителя. HUD отображает всю важную информацию для водителя, не требуя, чтобы он отвлекался от своей точки зрения. Отображаемая информация обычно включает в себя скорость автомобиля и навигацию, однако HUD можно настроить, чтобы добавить несколько других.
Система ночного видения (NVS)
Система ночного видения предоставляет информацию о зоне вне досягаемости фар. Эта система использует расположение тепловизионных камер, проекционный дисплей, инфракрасные лучи и несколько других технологий для оценки информации.
Обнаружение слепых зон
Для водителя существует много мертвых зон, так как его обзору за пределами автомобиля мешают оконные стойки, подголовники, другие пассажиры и другие объекты. Технология обнаружения слепых зон использует датчики, установленные на боковых зеркалах или заднем бампере, для обнаружения транспортных средств на других полосах движения и расстояния до них, и всякий раз, когда обнаруживается любое небезопасное движение, она информирует водителя с помощью звукового или визуального предупреждения.
Технология обнаружения слепых зон использует датчики, установленные на боковых зеркалах или заднем бампере, для обнаружения транспортных средств на других полосах движения и расстояния до них, и всякий раз, когда обнаруживается любое небезопасное движение, она информирует водителя с помощью звукового или визуального предупреждения.
Мониторинг водителя или обнаружение сонливости водителя
Система мониторинга водителя определяет внимательность водителя. За процессом следит камера замкнутого цикла, установленная на рулевом колесе. Камера отслеживает состояние глаз водителя с помощью инфракрасных светодиодных (LED) детекторов. Если водитель чувствует сонливость, это фиксируется камерой, и система мигает светом или предупреждает высоким звуковым сигналом.
Распознавание дорожных знаков
Распознавание дорожных знаков постоянно уведомляет водителя о дорожных знаках и введенных ограничениях. К ним относятся обычные дорожные знаки и разрешенные ограничения скорости.
Автономная система экстренного торможения
Автономная система экстренного торможения снижает скорость автомобиля и автоматически включает тормоза при обнаружении возможного столкновения и отсутствии действий со стороны водителя или его медленных действиях. Система обнаруживает потенциальное столкновение с помощью датчиков, камер, GPS и лазеров.
Tata Nexon является одним из самых безопасных автомобилей в Индии и имеет 5-звездочный рейтинг NCAP по всему миру. разум, который не может быть измерен. Кроме того, в Индии дороги заполнены автомобилями, а потребность в мерах безопасности относительно выше, чем в большинстве других стран. Автопроизводители постоянно улучшают функции безопасности и разрабатывают новые, чтобы повысить уровень безопасности и облегчить жизнь людей, покупающих их автомобили. Более того, прогресс таких начинаний довольно очевиден в современных автомобилях, и они безопаснее, чем когда-либо. Надеюсь, вышеизложенная информация будет вам очень назидательна.
Что такое активные и пассивные функции безопасности?
Функции активной безопасности снижают вероятность несчастных случаев, а функции пассивной безопасности уменьшают ущерб, причиненный авариями.
Какие индийские автопроизводители производят самые безопасные автомобили?
Судя по статистике, Махиндра и Тата делают самые безопасные автомобили.
Какие автомобили самые безопасные в Индии?
Самыми безопасными автомобилями в Индии являются Tata Nexon, Tata Tiago, Tata Altroz, Mahindra XUV300, Mahindra Marazzo и Volkswagen Polo.
Чем адаптивный круиз-контроль отличается от стандартного круиз-контроля?
С помощью круиз-контроля ваш автомобиль движется с постоянной скоростью, которую вы установили. В адаптивном круиз-контроле автомобиль автоматически меняет скорость в зависимости от условий вокруг, чтобы держать автомобиль на безопасном расстоянии от других автомобилей.
Какие функции безопасности в автомобиле самые важные?
Хотя чем больше функций безопасности, тем лучше, некоторые из наиболее необходимых функций безопасности: двойные передние подушки безопасности, ABS с EBD, контроль устойчивости на поворотах, задние датчики парковки, преднатяжители ремней безопасности, дверной замок с датчиком скорости, разблокировка двери с датчиком удара, сигнал экстренного торможения. , усиленная средняя стойка и детские крепления ISOFIX.
, усиленная средняя стойка и детские крепления ISOFIX.
Важные ссылки
7-местные автомобили | Лучшие автомобили с пробегом | Подержанные автомобили в Бангалоре | Подержанные автомобили в Дели | Гибридные автомобили в Индии | Люк Автомобили | Подержанные автомобили в Гургаоне | Подержанные автомобили в Хайдарабаде | Подержанные автомобили в Нойде | Подержанные автомобили в Пуне | CNG Автомобили в Индии | Джипы в Индии | Подержанные автомобили в Мумбаи | Подержанные автомобили в Ахмадабаде | Типы автомобилей | Марки автомобилей в Индии | Подержанные автомобили в Ченнаи | Подержанные автомобили в Калькутте | Подержанные автомобили в Лакхнау | Автоматические автомобили в Индии | Роскошные автомобили в Индии | Подержанные автомобили в Чандигархе | Подержанные автомобили в Коимбатур | Подержанные автомобили в Индауре | Подержанные автомобили в Джайпуре
Взгляд на автомобильную активную систему безопасности Global
| Источник: Исследования и рынки Исследования и рынки
Дублин, 9 февраля 2022 г. (GLOBE NEWSWIRE) — Отчет «Рынок автомобильных систем активной безопасности: глобальные отраслевые тенденции, доля, размер, рост, возможности и прогноз на 2022–2027 гг.» был добавлен в Предложение ResearchAndMarkets.com .
В 2021 году мировой рынок автомобильных систем активной безопасности достиг 11,4 млрд долларов США. Заглядывая вперед, издатель ожидает, что рынок достигнет 28,6 млрд долларов США к 2027 году, демонстрируя среднегодовой темп роста 16,4% в течение 2022-2027 годов. Помня о неопределенности, связанной с COVID-19, они постоянно отслеживают и оценивают как прямое, так и косвенное влияние пандемии. Эти идеи включены в отчет в качестве основного фактора, влияющего на рынок 9.0003
Автомобильная активная безопасность — это превентивная система, которая помогает водителю управлять транспортным средством, предотвращая или смягчая последствия дорожно-транспортных происшествий и улучшая общее впечатление от вождения в различных дорожных условиях и ситуациях. Система помогает удерживать автомобиль на правильной полосе движения и показывает мертвые зоны, которые в противном случае могут привести к аварии или другим опасностям. Он использует предупреждение о прямом столкновении (FCW) и предупреждение о выходе из полосы движения (LDW), которые генерируют предупреждение при обнаружении потенциально опасной ситуации. Другие его функции включают в себя автономное экстренное торможение (AEB), электронный контроль устойчивости (ESC) и адаптивный круиз-контроль (ACC), которые выполняют самые разные функции: от контроля тормозной системы и шин до поддержания безопасного расстояния до впереди идущего автомобиля.0003
Система помогает удерживать автомобиль на правильной полосе движения и показывает мертвые зоны, которые в противном случае могут привести к аварии или другим опасностям. Он использует предупреждение о прямом столкновении (FCW) и предупреждение о выходе из полосы движения (LDW), которые генерируют предупреждение при обнаружении потенциально опасной ситуации. Другие его функции включают в себя автономное экстренное торможение (AEB), электронный контроль устойчивости (ESC) и адаптивный круиз-контроль (ACC), которые выполняют самые разные функции: от контроля тормозной системы и шин до поддержания безопасного расстояния до впереди идущего автомобиля.0003
Растущий парк транспортных средств и, как следствие, повышение внимания к безопасности транспортных средств являются ключевыми факторами, определяющими спрос на автомобильные системы активной безопасности. Поскольку увеличение количества транспортных средств приводит к увеличению риска дорожно-транспортных происшествий, органы власти как в развитых, так и в развивающихся регионах вводят строгие правила для повышения безопасности дорожного движения. В соответствии с этим производители автомобилей запускают функции безопасности в автомобилях, а также инвестируют в исследования и разработки для внедрения новейших технологий в эти системы. Кроме того, растущий спрос на автономные транспортные средства еще больше стимулирует рынок, поскольку системы активной безопасности являются важнейшим компонентом этих транспортных средств 9.0003
В соответствии с этим производители автомобилей запускают функции безопасности в автомобилях, а также инвестируют в исследования и разработки для внедрения новейших технологий в эти системы. Кроме того, растущий спрос на автономные транспортные средства еще больше стимулирует рынок, поскольку системы активной безопасности являются важнейшим компонентом этих транспортных средств 9.0003
Сегментация ключевого рынка:
Издатель предоставляет анализ основных тенденций в каждом подсегменте мирового рынка автомобильных систем активной безопасности, а также прогнозы на глобальном и региональном уровне на 2022–2027 годы. В нашем отчете рынок классифицирован по продуктам, типам транспортных средств, типам топлива и предложениям.0281
ПРОМЫШКИ КАРТИРОВАНИЯ
. Разбивка по типу топлива: Breakup by Offering: Breakup by Region: Конкурентная среда: В отчете также проанализирована конкурентная среда на рынке, ключевыми игроками которой являются Bosch, Continental, Delphi Technologies, ZF Friedrichshafen, Autoliv, Hyundai Mobis, Valeo, DENSO, Magna International, FLIR. В последнем отчете издателя представлен глубокий анализ мирового рынка автомобильных систем активной безопасности, охватывающий все его основные аспекты. Это варьируется от макрообзора рынка до микродеталей производительности отрасли, последних тенденций, ключевых факторов рынка и проблем, SWOT-анализа, анализа пяти сил Портера, анализа цепочки создания стоимости и т. д. Этот отчет обязателен к прочтению предпринимателями, инвесторами. , исследователи, консультанты, бизнес-стратеги и все те, кто имеет какую-либо заинтересованность или планирует каким-либо образом выйти на мировой рынок автомобильных систем активной безопасности Ключевые вопросы, на которые даны ответы в этом отчете: Ключевые темы, охватываемые: 1 Предисловие 2 Scope and Methodology  Systems, Infineon Technologies, Ficosa International S.A., Groupe PSA, Borg Warner Inc., CAx Software и т. д.
Systems, Infineon Technologies, Ficosa International S.A., Groupe PSA, Borg Warner Inc., CAx Software и т. д. Рынок систем активной безопасности
Рынок систем активной безопасности
5.1 Обзор рынка
5.2 Динамика рынка
5.3 Влияние COVID-19
5.4 Структура рынка по продуктам
5.5 Структура рынка по типам транспортных средств
5.6 Структура рынка по типам топлива
5.7 Структура рынка по предложениям
5.8 Структура рынка по регионам
5.9 Прогноз рынка Рынок
Продукт
6.1 Система контроля давления в шинах
6.1.1 Тенденции рынка
6.1.2 Прогноз рынка
6.2 Предупреждение о выходе из полосы движения
6.2.1 Тенденции рынка
6.2.2 Прогноз рынка
6.3 Адаптивный круиз-контроль
6.3.1 Тенденции рынка
6.3.2 Прогноз рынка
6.4 Система ночного видения
6.4.1 Тенденции рынка
6.4.2 Прогноз рынка
6.5 Мониторинг водителя
6.5.1 Тенденции рынка
6.5.2 Прогноз рынка
6.6 AntiLock Тормозная система
6.6.1 Тенденции рынка
6.6.2 Прогноз рынка
6.7 Обнаружение слепых зон
6. 7.1 Тенденции рынка
7.1 Тенденции рынка
6.7.2 Прогноз рынка
6.8 Прочее
6.8.1 Тенденции рынка
2 7 90 2 90 9 0 Прогноз рынка 3 Распределение рынка по типу транспортного средства
7.1 Легковые автомобили
7.1.1 Тенденции рынка
7.1.2 Прогноз рынка
7.2 Легкие коммерческие автомобили
7.2.1 Тенденции рынка
7.2.2 Прогноз рынка
7.3 Тяжелые коммерческие автомобили
7.3.2 Тенденции рынка 9.3.1 Тенденции рынка 9.0408 Прогноз
7.4 Прочее
7.4.1 Тенденции рынка
7.4.2 Прогноз рынка
8 Структура рынка по видам топлива
8.1 Дизельные автомобили
8.1.1 Тенденции рынка
8.1.2 Автомобили 8.1.2 Бензиновые автомобили 8.0.20 Прогноз рынка 8040 9040 Тенденции рынка
8.2.2 Рыночный прогноз
8.3 Электромобили
8.3.1 Тенденции рынка
8.3.2 Прогноз рынка
8.4 другие
8.4.1 Тенденции рынка
8.4.2 Forecast
9 Рыночный разрыв. Разрушение
9.