
Углы установки колес автомобиля — на что влияют и для чего нужны
От правильной регулировки колес зависят многие факторы: управляемость, срок службы покрышек, расход топлива. Давайте разберемся в них — на что влияют и для чего нужны.
Для чего нужны
К рекомендациям фирм-производителей по установке колес следует относиться с полной ответственностью. Для каждой модели рекомендации различны. Эти углы обеспечивают наилучшие показатели устойчивости и управляемости, а также минимальный износ шин.
Периодически при эксплуатации авто (через 30 000 км пробега) их полезно контролировать, а если на машине были заменены отдельные элементы подвески и тем более после серьезных ударов это необходимо делать сразу. Следует помнить, что регулировка углов управляемых колес является заключительной операцией ремонта подвески, деталей ходовой части и рулевого управления.
Максимальный угол поворота
Характеризует максимальный угол, при котором повернется колесо машины при полностью вывернутом руле. Чем меньше он, тем больше точность и плавность управления. Ведь для поворота даже на небольшой угол потребуется лишь малое движение рулем.
Чем меньше он, тем больше точность и плавность управления. Ведь для поворота даже на небольшой угол потребуется лишь малое движение рулем.
Не стоит забывать, что чем меньше максимальный угол поворота, тем меньше радиус разворота автомобиля. Т.е. развернутся в ограниченном пространстве будет тяжело. Приходится производителям искать «золотую середину», маневрируя между большим радиусом поворота и точностью управления.
Плечо обката
Это кратчайшее расстояние между серединой покрышки и осью поворота колеса. Если ось вращения и середина колеса совпадает, то значение считается нулевым. При отрицательном значении — ось вращения смещается наружу колеса, а при положительном — внутрь.
Для автомобилей с задним приводом рекомендуется плечо обката с нулевым или отрицательным значением. На практике, из-за конструкции машины, сделать это сложно, т.к. механизм не помещается внутрь колеса. Получается в итоге автомобиль с положительным плечом обката, который ведет себя непредсказуемо: руль при проезде по неровностям может вырывать из рук, при прохождении поворотов создается ощутимый момент, препятствующий равномерному движению.
Для борьбы с положительным плечом обката, специалисты наклоняли ось поворота в поперечном направлении и делали положительный развал. Это хоть и уменьшало плечо обката, но плохо сказывалось на управлении автомобилем в повороте.
Угол кастера
Отвечает за динамическую стабилизацию управляемых колес. Если просто, то он заставляет машину ехать прямо при отпущенном руле. Т.е. если убрали руки с руля, то автомобиль в идеале должен ехать прямо и не куда не отклоняться. Если на авто действует боковая сила (например, ветер), то кастер должен обеспечивать плавный поворот автомобиля в сторону действия силы при отпущенном руле. К тому же, кастер не дает машине опрокинуться.
Главная функция кастера — наклон колес в сторону поворота руля. Наклон колеса влияет на сцепление с дорогой, а значит на управляемость. Если машина двигается прямо, то колеса имеются наибольшее сцепление с дорогой, что обеспечивает для водителя быстрый старт и позднее торможение.
При повороте колеса, покрышка деформируется под действием боковых сил. Чтобы сохранить максимальное пятно контакта с дорогой, колесо тоже наклоняется в сторону поворота. Но нужно знать меру, ведь при большом кастере, колесо будет сильно наклоняться, и утратит тогда сцепление с дорогой.
Поперечный наклон оси
Отвечает за весовую стабилизацию управляемых колес. Суть в том, что в момент отклонения колеса от «нейтрали» передок начинает подниматься. А т.к. весит он немало, то при отпускании руля под действием силы тяжести система стремится занять исходное положение, соответствующее движению по прямой. Правда, чтобы эта стабилизация работала, нужно сохранить (хоть и небольшое, но нежелательное) положительное плечо обката.
Изначально, поперечный угол наклона оси поворота был применен инженерами для устранения недостатков подвески автомобиля. Он избавлял от таких «недугов» как положительный развал и плечо обката.
Во многих автомобилях применяется подвеска типа «МакФерсон». Она дает возможность получить отрицательное или нулевое плечо обката. Ведь ось поворота состоит из опоры одного единственного рычага, которой можно поместить внутрь колеса. Эта подвеска не совершенна, ведь сделать угол наклона оси маленьким практически невозможно. В повороте он наклоняет внешнее колесо под невыгодным углом (как у положительного развала), а внутреннее колесо одновременно наклоняется в противоположную сторону.
Она дает возможность получить отрицательное или нулевое плечо обката. Ведь ось поворота состоит из опоры одного единственного рычага, которой можно поместить внутрь колеса. Эта подвеска не совершенна, ведь сделать угол наклона оси маленьким практически невозможно. В повороте он наклоняет внешнее колесо под невыгодным углом (как у положительного развала), а внутреннее колесо одновременно наклоняется в противоположную сторону.
В результате пятно контакта у внешнего колеса сильно уменьшается. Т.к. на внешнее колесо в повороте приходится основная нагрузка, вся ось сильно теряет в сцеплении. Это, конечно, можно частично компенсировать кастером и развалом. Тогда сцепление внешнего колеса будет хорошим, а у внутреннего — практически исчезнет.
Схождение колес
Существует два вида схождения: положительное и отрицательное. Определить просто: нужно провести две прямые линии вдоль колес автомобиля. Если эти линии пересекутся спереди машины, то схождение положительное, а если сзади — отрицательное.
Если положительное схождение, то авто легче заходит в поворот, а также приобретет дополнительную поворачиваемость, при прямолинейном движении будет более устойчивым. Если отрицательное схождение — то авто едет неадекватно, рыскает из стороны в сторону. Но следует помнить, что чрезмерное отклонение схождения от нулевого значения увеличит сопротивление качению при прямолинейном движении, в поворотах это будет заметно в меньшей степени.
Развал колес
Бывает отрицательным и положительным.
Если смотреть спереди автомобиля, и колеса будут наклоняться вовнутрь — это отрицательный развал. Если будут отклоняться наружу — положительный.
Развал необходим для сохранения сцепления колеса с дорожным полотном. На серийных машинах делают нулевой или немного положительный развал. Если нужна хорошая управляемость — его делают отрицательным.
Регулировка задних колёс
На многих машинах не производиться регулировка углов задних колёс.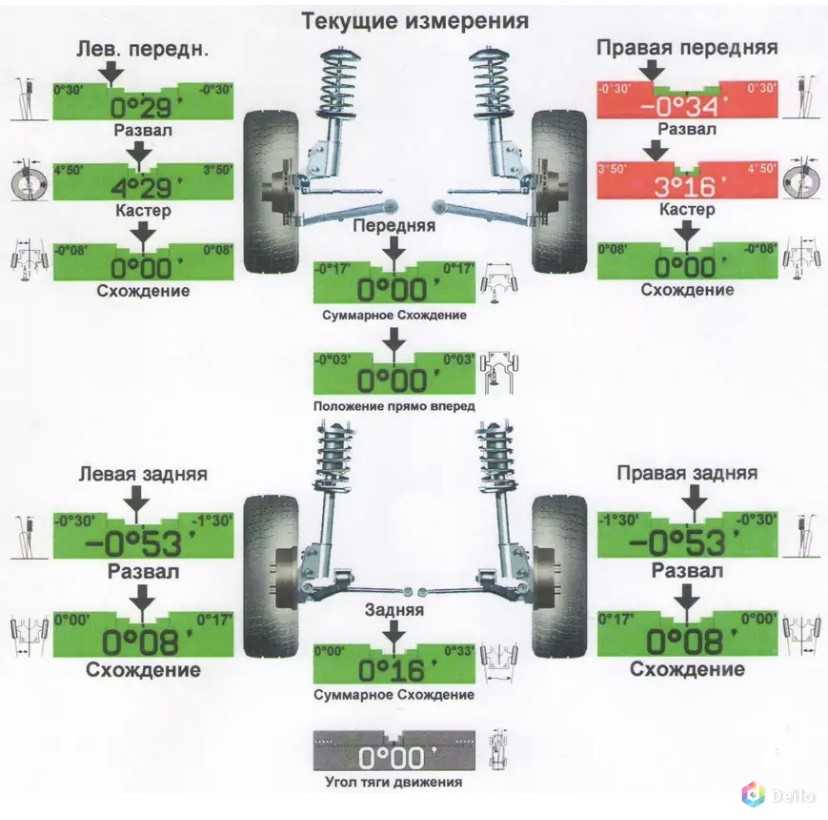 Например, на переднеприводных машинах ВАЗ, где сзади установлена жёсткая балка. Нарушения могут быть только при серьезной аварии, когда погнётся задняя балка. Также не регулируются задние углы на внедорожниках с жестким мостом. На многих иномарках стоит многорычажная подвеска сзади. Значит, можно регулировать схождение и развал задних колёс.
Например, на переднеприводных машинах ВАЗ, где сзади установлена жёсткая балка. Нарушения могут быть только при серьезной аварии, когда погнётся задняя балка. Также не регулируются задние углы на внедорожниках с жестким мостом. На многих иномарках стоит многорычажная подвеска сзади. Значит, можно регулировать схождение и развал задних колёс.
Делать это нужно обязательно после удара об бордюр или аварии. Потому что любая машина очень чувствительна к изменению угла схождения задних колёс. Если он будет отрицательным, то автомобиль при прохождении поворота будет постоянно заносить. Если положительный — тоже плохо, у машины проявиться недостаточная поворачиваемость. В повороте машине будет стремиться ехать прямо.
Что делать сначала
Сначала регулируются углы установки задних колёс (есть возможно), а только потом — передних. Сначала выставляют кастер, потом — развал и последним (обязательно) — схождение. Также нужно следить, чтобы рулевое колесо стояло прямо. Для этого используют специальные приспособления для его фиксации.
Для этого используют специальные приспособления для его фиксации.
Применение спортивных настроек скажется отрицательно на комфорте. Если сделать кастер слишком большим или большой отрицательный развал — увеличиться усилие на руле. Но это лучший способ изменить поведение машины на более спортивное.
Углы установки колес автомобиля
Схождение колес
Угол между плоскостью вращения колеса и осевой линией автомобиля (индивидуальное схождение каждого из колес). Также суммарное схождение — это сумма углов схождения левого и правого колеса.
Правильно отрегулированный статический угол суммарного схождения приведет к расположению колес параллельно при движении. Неправильно отрегулированное суммарное схождение приведет к повышенному износу шин, сопротивлению движению (и как следствие увеличенному расходу топлива).
В случае если суммарное схождение отрегулировано верно, но индивидуальные схождения двух колес не равны при горизонтально установленном рулевом колесе, на современных автомобилях возможны проблемы со вспомогательными системами (при наличии датчика положения рулевого колеса). Также при прямолинейном движении на любом автомобиле руль будет стоять не по уровню.
Также при прямолинейном движении на любом автомобиле руль будет стоять не по уровню.
Схождение является наиболее важным углом установки колес, т.к. при отклонении от нормы всего на 15′ срок службы шины может упасть в два-три раза, в то время как допуск на углы развала и кастера у большинства производителей составляют от 30′ до 1 градуса. Также схождение передних колес является единственным углом поддающимся штатной регулировке абсолютно у всех автомобилей. Измеряется абсолютно всеми измерительными системами Hunter как для передней, так и для задней осей.
Развал колес
Угол между плоскостью вращения колеса и вертикалью.
Уменьшает (при правильной установке) нагрузку на элементы рулевого управления и подвески, смягчает удары от дорожного покрытия.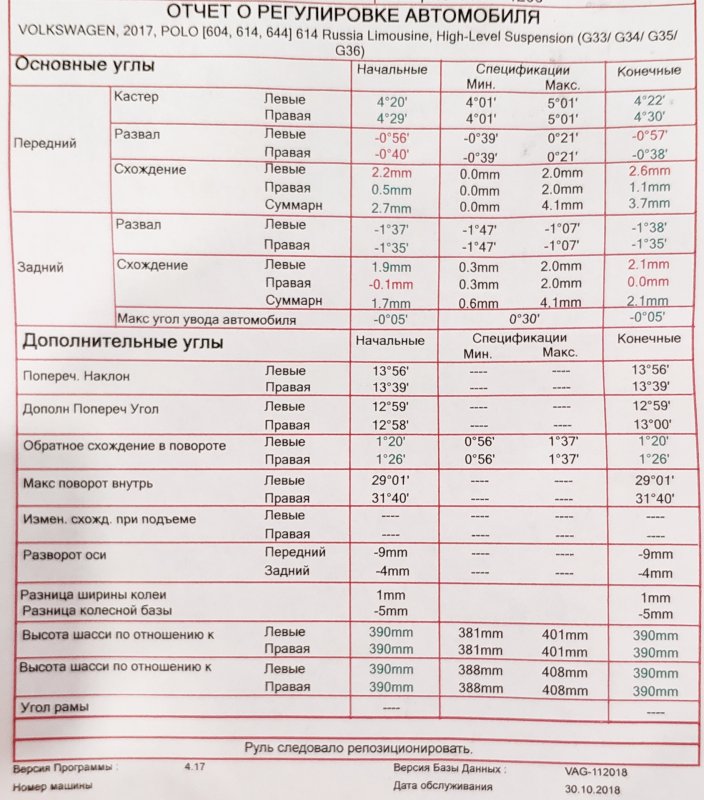 Способствует поддержанию прямолинейного движения, и увеличению срока службы шин.
Способствует поддержанию прямолинейного движения, и увеличению срока службы шин.
Неверный угол развала вызывает увод автомобиля от прямолинейного движения и увеличенный износ шин. В отличие от схождения, в случае значительного отклонения от нормы развала неравномерный износ резины будет заметен только к концу службы шины.
Большинство автомобилей имеют штатную регулировку угла развала передних колес.
Измеряется абсолютно всеми измерительными системами Hunter как для передней, так и для задней осей.
Угол продольного наклона шкворня (поворотной оси) или кастер
Обеспечивает стабильность движения при повороте транспортного средства. Неправильно отрегулированный угол продольного наклона оси поворота приведет к увеличению сопротивления рулевого колеса, вибрациям и уводу автомобиля от прямолинейного движения.
Многие автомобили не поддерживают регулировку кастера штатными средствами (например автомобили группы VAG) в этом случае угол кастера может использоваться для диагностики элементов подвески и кузова на наличие возможных повреждений.
Поскольку ось поворота во многих конструкциях подвески нематериальна, на нее невозможно установить какой-либо датчик. Поэтому кастер вычисляется по изменению схождения и развала колес при повороте на определенный угол (10 или 20 градусов).
Измеряется абсолютно всеми измерительными системами Hunter.
Угол поперечного наклона шкворня (поворотной оси)
Обеспечивает стабильность движения и используется для уменьшения нагрузки на элементы подвески и рулевого управления при ударах от дороги.
Неверно выставленный угол продольного наклона может привести к потере стабильности и недостаточной отдаче рулевого колеса.
Угол поперечного наклона не подлежит регулировке штатными методами и его значительное отклонение от нормы говорит о наличии повреждений подвески либо кузова автомобиля.
Измеряется тем же способом, что и кастер.
Измеряется абсолютно всеми измерительными системами Hunter.
Смещение оси автомобиля
Смещение оси — расстояние между линиями проходящими через ось вращения колес и перпендикулярных осевой линии автомобиля.
Данный вспомогательный диагностический угол может быть использован для выявления неисправных элементов подвески или кузова.
В случае чрезмерного смещения, автомобиль теряет стабильность при движении и уменьшается отдача рулевого колеса.
Смещение передних колес измеряется всеми измерительными системами Hunter. Смещение задних колес измеряется всеми стендами использующими технологию 3D и только инфракрасными датчиками имеющими «замкнутый контур» (DSP708, DSP508, DSP308 или DSP258).
Расстояние от колесной арки до оси вращения колеса — Ride Height
Высота посадки используется как диагностическое средство для диагностики (пружин) подвески а также как требуемый параметр для определения углов установки колес в моделях автомобилей, где углы установки зависят от просадки пружин.
Стенды Hunter позволяют измерять высоту посадки несколькими способами.
Самый удобный способ — измерение с помощью дополнительного набора мишеней, устанавливаемых на крылья автомобилей. Функция поддерживается только 3D-стендами Hunter с премиум-консолью WA или 811.
Функция поддерживается только 3D-стендами Hunter с премиум-консолью WA или 811.
Также высоту посадки можно измерить с помощью дополнительного инфракрасного пульта со встроенной электронной рулеткой 20-1885-1.
Также высота посадки у стендов Hunter традиционно измерялась инфракрасными датчиками DSP306/506 и DSP308/508 с помощью механического устройства (как показано на рисунке справа).
Доступно только для 811/WA консолей.
Максимальный угол поворота каждого из колес
Дополнительный диагностический угол позволяет провести диагностику элементов подвески и рулевой системы.
Позволяет выявить дефекты или неправильную установку релевого механизма, рулевых тяг и т.д.
Измеряется автоматически электронными поворотными пластинами или вручную по указателю на поворотных дисках (при наличии такого указателя).
Поддерживается всеми моделями компьютерных консолей Hunter (PA100 и WA100).
Углы симметрии
Данная функция позволяет быстро определить наличие повреждений кузова или элементов подвески.
Позволяет оценить шансы на приведение всех углов установки колес в норму и объяснить клиенту почему на его автомобиле после окончания регулировки остались «красные» значения.
Внимание!
Данная функция не предназначена для серъезной диагностики состояния кузова, а только для экспресс анализа состояния кузова и подвески. Для правильной профессиональной диагностики состояния кузова требуется использовать профильное оборудование проводящее измерение контрольных точек кузова, а не взаимного положения колес.
Измерение колесной базы и ширины колеи
Дополнительная опция для диагностики кузова.
Доступно только для компьютерных консолей WA100/WA300.
Метод управления углом развала, соответствующий возрасту электромобиля
Машиностроение
Том 6 №8(2014), Статья
ID:47934,13
страницы
DOI: 10. 4236/eng.2014.68049
4236/eng.2014.68049
Метод управления углом развала, соответствующий возрасту электромобиля
Takahiko Yoshino, Hiromichi Nozaki
Факультет машиностроения, Университет Когакуин, Токио, Япония
Эл. под лицензией Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/
Поступила в редакцию 10 мая 2014 г.; пересмотрено 20 июня 2014 г.; принято 2 июля 2014 г.
РЕФЕРАТ
В последние годы перевод транспортных средств на электрическую энергию ускоряется, и если будет достигнут полный переход на электрическую энергию, ожидается дальнейшее развитие технологии кинематического управления транспортными средствами. Поэтому считается, что кинематические характеристики в критическом диапазоне прохождения поворотов могут быть дополнительно улучшены за счет значительного контроля не только угла поворота рулевого колеса, но и угла развала шин с помощью электромагнитных приводов. Это исследование было сосредоточено на методе управления отрицательным углом развала на земле, который пропорционален углу поворота рулевого колеса, в качестве метода улучшения маневренности и устойчивости для поддержки новой эры электромобилей, и была выяснена его эффективность. В результате было обнаружено, что и в критическом диапазоне поворотов управление углом развала может управлять как моментом рыскания, так и поперечным ускорением на пределе поворота. Также было подтверждено, что как устойчивость, так и эффект рулевого управления в критическом диапазоне прохождения поворотов улучшаются за счет реализации управления отрицательным углом развала, которое пропорционально углу поворота рулевого колеса, с использованием исполнительных механизмов. Существенных улучшений в характеристиках предельного прохождения поворотов можно добиться, внедрив систему управления отрицательным углом развала, которая пропорциональна углу поворота рулевого колеса.
Это исследование было сосредоточено на методе управления отрицательным углом развала на земле, который пропорционален углу поворота рулевого колеса, в качестве метода улучшения маневренности и устойчивости для поддержки новой эры электромобилей, и была выяснена его эффективность. В результате было обнаружено, что и в критическом диапазоне поворотов управление углом развала может управлять как моментом рыскания, так и поперечным ускорением на пределе поворота. Также было подтверждено, что как устойчивость, так и эффект рулевого управления в критическом диапазоне прохождения поворотов улучшаются за счет реализации управления отрицательным углом развала, которое пропорционально углу поворота рулевого колеса, с использованием исполнительных механизмов. Существенных улучшений в характеристиках предельного прохождения поворотов можно добиться, внедрив систему управления отрицательным углом развала, которая пропорциональна углу поворота рулевого колеса.
Ключевые слова: Управление движением, автомобиль, динамика автомобиля, маневренность, контроль угла развала
1. Введение , продольное и вертикальное перемещение транспортных средств за счет управления компонентами шасси, такими как рулевое управление, тормоза, трансмиссия и подвеска. 4WS относительно просто описать с помощью математических моделей управления, что делает эту тему часто исследуемой темой для применения расширенных правил управления и приводит к разработке различных алгоритмов управления для улучшения характеристик транспортного средства. При небольших боковых ускорениях угол увода шины можно эффективно контролировать с помощью рулевого управления. Однако рулевое управление становится менее эффективным по мере увеличения поперечного ускорения поворота, поскольку угол бокового увода шины также увеличивается, что приводит к насыщению боковой силы шины. Чтобы противодействовать этой слабости в 4WS, [1]-[5] предложили метод, основанный на управлении моментом рыскания, который использует разницу в тормозных и движущих силах между правой и левой шинами. Этот метод, который успешно применялся на практике, уменьшает поведенческие изменения при ускорении и торможении вблизи предела ускорения при боковом повороте.
Введение , продольное и вертикальное перемещение транспортных средств за счет управления компонентами шасси, такими как рулевое управление, тормоза, трансмиссия и подвеска. 4WS относительно просто описать с помощью математических моделей управления, что делает эту тему часто исследуемой темой для применения расширенных правил управления и приводит к разработке различных алгоритмов управления для улучшения характеристик транспортного средства. При небольших боковых ускорениях угол увода шины можно эффективно контролировать с помощью рулевого управления. Однако рулевое управление становится менее эффективным по мере увеличения поперечного ускорения поворота, поскольку угол бокового увода шины также увеличивается, что приводит к насыщению боковой силы шины. Чтобы противодействовать этой слабости в 4WS, [1]-[5] предложили метод, основанный на управлении моментом рыскания, который использует разницу в тормозных и движущих силах между правой и левой шинами. Этот метод, который успешно применялся на практике, уменьшает поведенческие изменения при ускорении и торможении вблизи предела ускорения при боковом повороте.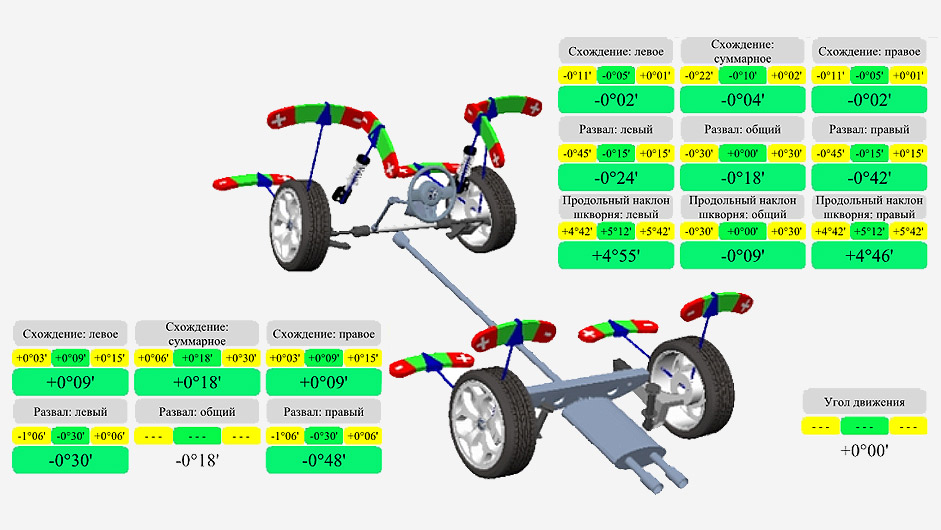
С другой стороны, в последние годы перевод транспортных средств на электроэнергию ускорился, и если будет достигнут полный переход на электроэнергию, ожидается дальнейшее развитие технологии кинематического управления транспортными средствами. Когда транспортные средства будут переведены на электрическую энергию, для торможения и движения будут использоваться внутриколесные двигатели, расположенные в каждом из четырех колес, и станет возможным независимое управление торможением и движением на каждом из четырех колес. Кроме того, также будет проще самостоятельно управлять углом поворота всех колес с помощью электромагнитных приводов.

2. Метод оценки момента для улучшения характеристик движения транспортного средства
2.1. Обозначение
В настоящем исследовании используются следующие обозначения:
: Расстояние между центром тяжести и передними или задними колесами
: Сила со стороны передних колес
: Сила со стороны задних колес
: Самоустанавливающаяся крутящий момент каждого колеса Становится очевидным из метода моментов. Уравнение движения транспортного средства не может быть решено аналитически, когда характеристики шины нелинейны. Поэтому мы предположили, что транспортное средство (рисунок 1) движется прямо вперед с боковым движением в центре тяжести и что движение по рысканию ограничено. Затем по восстанавливающему моменту, действующему на кузов автомобиля, оценивались характеристики движения автомобиля. Сумма боковых сил на четырех колесах определяется уравнением (2).
(1)
(2)
Связь между уравнениями (3) и (4) показана на рисунке 1.
(3)
(4)
восстанавливающий момент от угла бокового скольжения в центре тяжести и угла поворота переднего колеса в условиях ограничения на рисунке 1. Поскольку все состояния движения транспортного средства могут быть выражены как комбинации углов переднего и заднего бокового скольжения, обозначены как и соответственно (при расчете по уравнениям (3) и (4)), моментная диаграмма
Рисунок 1. Модель автомобиля и условия анализа.
может выражать все состояния движения транспортного средства: линейное, нелинейное, устойчивое и переходное. Чтобы определить это соотношение по отношению к боковому ускорению, нужно разделить вес транспортного средства, а когда гравитационное ускорение принять за единицу, и отношение между и проверяется. Затем получается линейный график [9] .
2.2. Нелинейная модель шины
В модели шины используется волшебная формула [10], которая стабильно определяет кривую характеристик шины, зависящую от трения. Боковая сила в волшебной формуле вычисляется из уравнения (5), где α — угол бокового скольжения шины, угол развала и нагрузка на колесо.
Боковая сила модели шины определяется коэффициентами магической формулы , и, а также параметрами, выражающими состояние шины, а именно нагрузкой на колесо, углом бокового увода шины и углом развала. В таблице 1 показано значение коэффициента Волшебной формулы. Параметры магической формулы через, которые определяются из данных измерений, выражают различия в характеристической кривой шины. Поскольку исполнительный механизм вносит значительные изменения в угол развала, предполагается, что шины имеют круглую форму для области контакта с землей, такую как мотоциклетные шины. Характеристики, возникающие при значительном изменении угла развала шин, показаны на рис. 2.9.0006
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
показаны в Таблица 2 Используемые параметры нижнего регистра.
2.3. Модель для анализа распределения нагрузки
Обозначения, используемые в модели анализа перемещений
: Масса транспортного средства
: Нагрузка на колеса
: Жесткость по крену передних и задних колес
: Распределение жесткости по крену между передними и задними колесами
: Высота центра крена передних и задних колес
: Высота центра тяжести
: Расстояние между центром тяжести и осью крена
: Колеса передних и задних колес
: Нагрузки на передние и задние колеса
: Боковое и продольное ускорение (в единицах ускорения свободного падения g)
С этой целью мы принимаем подход квазистабильного состояния, предложенный Абэ (рис. 3). Уравнения с (14) по (17) описывают динамику нагрузки на четыре колеса во время поворота. (Здесь мы пренебрегаем продольными и поперечными перемещениями центра тяжести, вызванными синусоидальной составляющей углов крена и тангажа). На рис. 4 показаны характеристики смещения нагрузки при поперечном ускорении внутреннего и внешнего колес.
3). Уравнения с (14) по (17) описывают динамику нагрузки на четыре колеса во время поворота. (Здесь мы пренебрегаем продольными и поперечными перемещениями центра тяжести, вызванными синусоидальной составляющей углов крена и тангажа). На рис. 4 показаны характеристики смещения нагрузки при поперечном ускорении внутреннего и внешнего колес.
Таблица 1. Коэффициент Magic-Formule.
Рис. 2. Характеристики боковой силы шины (изменение угла развала).
Таблица 2. Параметры, использованные при расчете.
Рисунок 3. Модель для анализа распределения нагрузки [11] .
Рисунок 4. Нагрузка на шину в зависимости от поперечного ускорения.
(14)
(15)
(16)
(17)
(18)
(19)
(20)
3. Влияние контроля угла развала в предельной зоне
3.1. Условия расчета
Численные расчеты проводились с использованием параметров, перечисленных в Таблице 3. В модели приняты типичные характеристики веса автомобиля (), колесной базы () и распределения веса между передней и задней частями (60:40). Для характеристики подвески опущено объяснение влияния независимого относительного угла развала.
Для характеристики подвески опущено объяснение влияния независимого относительного угла развала.
3.2. Влияние управления углом развала в предельной зоне и результаты расчетов
На рис. 5 показаны характеристики движения автомобиля при нулевом угле развала. На рисунке 5(а) транспортное средство устойчиво движется по кругу, поворачивая, когда момент рыскания равен нулю. Когда кривая находится выше этой горизонтальной оси, восстанавливающий момент действует в направлении, которое уменьшает угол бокового скольжения, тем самым стабилизируя движение. И наоборот, если кривая находится ниже горизонтальной оси, момент увеличивает угол бокового скольжения, тем самым облегчая поворот. Когда угол бокового скольжения превышает предел устойчивого кругового поворота, создается восстанавливающий момент, и установившийся круговой поворот больше не является устойчивым, в результате чего передние колеса достигают предела перед задними колесами, и транспортное средство находится в состоянии удара.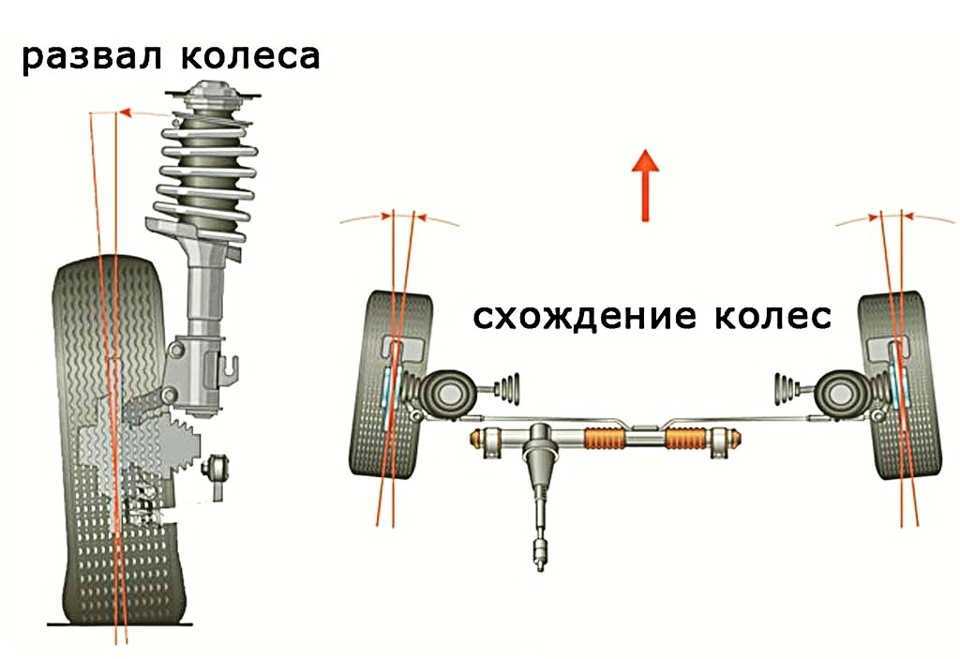 Рисунок 5(b) показывает, как это действие зависит от поперечного ускорения. Восстанавливающий момент создается, когда поперечное ускорение превышает предел поперечного ускорения для установившегося поворота по окружности.
Рисунок 5(b) показывает, как это действие зависит от поперечного ускорения. Восстанавливающий момент создается, когда поперечное ускорение превышает предел поперечного ускорения для установившегося поворота по окружности.
На рис. 6-8 показаны результаты больших изменений угла развала шин. Отрицательные углы развала указывают на то, что угол развала наклонен в направлении поворота. И наоборот, когда угол развала положительный, угол развала наклонен в сторону, противоположную направлению поворота. На рисунке 6 углы развала передних и задних колес равны отрицательному углу развала 20˚ и положительному углу развала 20˚ соответственно. Когда угол увода составляет примерно 4˚, заданные углы развала создают переходный момент поворота 5 кН·м (рис. 6(а)). Отсюда делаем вывод, что управление углом развала обеспечивает эффективное управление в предельной зоне. По поперечному ускорению
Таблица 3 . Параметры, используемые в расчете.
(a)(b)
Рис. 5. Диаграмма момента рыскания (нулевой угол развала).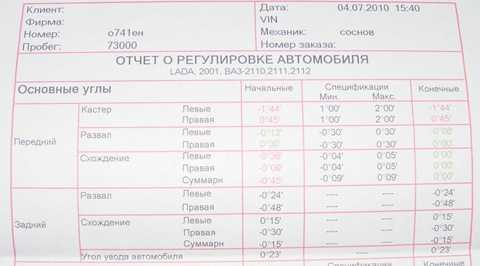 (а) диаграмма момента β-рыскания; (b) Y G — диаграмма момента рыскания.
(а) диаграмма момента β-рыскания; (b) Y G — диаграмма момента рыскания.
(a)(b)
Рис. 6. Диаграмма момента рыскания (отрицательный угол развала передних колес 20 град. Положительный угол развала задних колес 20 град). (а) диаграмма момента β-рыскания; (b) Y G — диаграмма момента рыскания.
(a)(b)
Рисунок 7. Диаграмма момента рыскания (угол развала передних колес положительный 20 град. угол развала задних колес отрицательный 20 град). (а) диаграмма момента β-рыскания; (б) Д G -диаграмма крутящего момента.
(a)(b)
Рис. 8. Диаграмма момента рыскания (отрицательный угол развала передних колес 20 град. Отрицательный угол развала задних колес 20 град). (а) диаграмма момента β-рыскания; (b) Y G — диаграмма момента рыскания.
(рис. 6(b)), переходный момент поворота создается примерно при 0,8g, что равно критическому поперечному ускорению при повороте без управления. Это указывает на то, что рулевое управление эффективно даже на пределе поворота.
На рисунке 7 углы развала передних и задних колес равны положительному углу развала 20˚ и отрицательному углу развала 20˚ соответственно. Изменение угла развала создает восстанавливающий момент на пределе поворота. Вращение можно предотвратить, создав таким образом переходный восстанавливающий момент.
На Рисунке 8 показаны результаты расчетов при использовании отрицательного угла развала передних колес, равного 20˚, и отрицательного угла развала задних колес, равного 20˚. По сравнению с рис. 5(а) и рис. 8(а). Это увеличение предельного угла скольжения кузова, при котором устойчивый круговой поворот может поддерживаться за счет управления углом развала. А сравнение рис. 5(b) и рис. 8(b) показывает, что отрицательный угол развала улучшает критическое поперечное ускорение при постоянном повороте по кругу. Обеспечение отрицательного угла развала, скорее всего, улучшит критическое поперечное ускорение на 20%.
На рис. 9 показано влияние управления углом развала, когда угол поворота передних колес δ * равен 0. Изменяя баланс между углами развала передних и задних колес, момент рыскания изменяется со стороны поворота. в сторону восстановления на пределе поворота. В случае управления моментом посредством рулевого управления угловая сила достигает состояния насыщения в критическом диапазоне поворота, и, следовательно, момент рыскания не может быть создан. Однако в случае управления углом развала крутящий момент может создаваться без сужения даже в критическом диапазоне прохождения поворотов.
Изменяя баланс между углами развала передних и задних колес, момент рыскания изменяется со стороны поворота. в сторону восстановления на пределе поворота. В случае управления моментом посредством рулевого управления угловая сила достигает состояния насыщения в критическом диапазоне поворота, и, следовательно, момент рыскания не может быть создан. Однако в случае управления углом развала крутящий момент может создаваться без сужения даже в критическом диапазоне прохождения поворотов.
4. Моделирование с использованием модели автомобиля
4.1. Обозначение
В настоящем исследовании используются следующие обозначения:
: Общая масса автомобиля, масса рессоры {1600, 1387 кг}
: Рыскание, момент инерции крена {}
: Колесная база, расстояние между центром передние или задние колеса {2,6, 1,02, 1,58 м}
: Колея передних и задних колес {1,47, 1,459 м}
: Пневматический след передних или задних колес {0,03, 0,03 м}
: Боковое ускорение
: Угол бокового скольжения кузова автомобиля, Скорость движения автомобиля
: Угол бокового скольжения переднего и заднего колес
: Угол развала переднего и заднего колеса
: Скорость рыскания, угол крена автомобиля
: Угол поворота переднего колеса
: Расстояние от ЦТ автомобиля до оси ролика {0,52 м}
: Высота центра крена передних и задних колес {0,046, 0,05 м}
: Жесткость переднего ролика, жесткость заднего ролика {47 040, 50 960 Н∙м/рад }
: Общая жесткость
: Коэффициент демпфирования крена {4000 Н∙мс/рад}
: Жесткость развала передних и задних колес под действием боковой силы
: Изменение угла развала передних и задних колес по углу крена на единицу
: Боковая сила каждого колеса , нагрузка на колесо
(это внутренние или внешние колеса.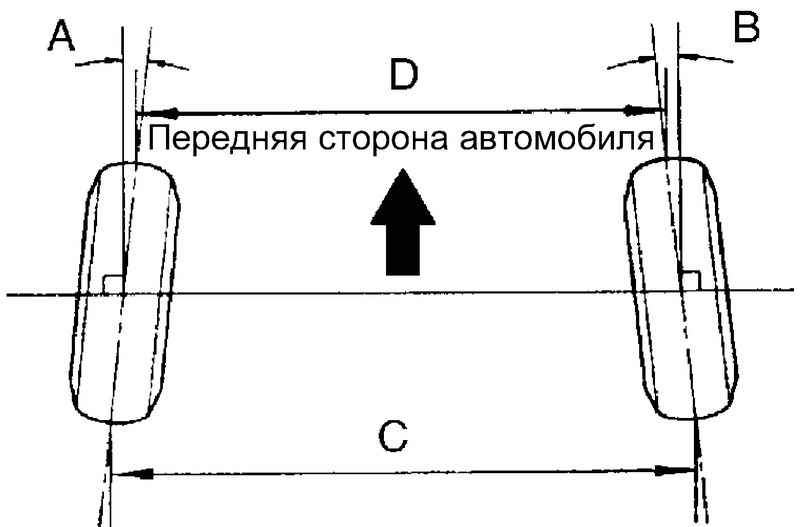 это переднее или заднее колесо)
это переднее или заднее колесо)
: Ускорение свободного падения
4.2. Расчетная модель
Модель транспортного средства для анализа представляла собой модель с тремя степенями свободы (скорость рыскания, угол скольжения кузова и крен). Кроме того, предполагалось, что характеристики подвески линейны, а угол скольжения и угол развала шин одинаковы для правых и левых шин. Уравнение движения выражается следующим уравнением (21) [12] .
(21a)
(21b)
(21c)
для угла проскальзывания шин:
(22)
Для угла камира диаграмма.
где
(24)
Используется модель шины Magic-Formula, показанная в Разделе 2.2, в качестве модели характеристик шины на поворотах, и используется та же характеристика шины.
Кроме того, когда нагрузка на переднее и заднее левое и правое колесо составляет
(25)
Колесная нагрузка каждого
(26)
4.3. Условия расчета
Введите ступенчатое рулевое управление с фактическим углом поворота переднего колеса 4˚ при движении со скоростью автомобиля 95 км/ч. Для управления углом развала одновременно с углом поворота руля используйте передние и задние колеса для управления отрицательным углом развала (20˚) относительно земли.
Для управления углом развала одновременно с углом поворота руля используйте передние и задние колеса для управления отрицательным углом развала (20˚) относительно земли.
4.4. Результаты вычислений
На рисунке 10 показаны результаты моделирования. Когда управление углом развала не реализовано, после ввода ступенчатого рулевого управления значения угла скольжения кузова и поперечного ускорения, когда транспортное средство установилось в устойчивое состояние, почти такие же, как пороговое предельное значение, при котором возможен устойчивый круговой поворот. поддерживается с помощью анализа метода моментов. Из этого видно, что имитируется предел поворота. Когда реализовано управление отрицательным углом развала на земле, которое пропорционально углу поворота рулевого колеса, сходимость скорости рыскания и угла скольжения кузова улучшается по сравнению с тем, когда оно не реализовано, и автомобиль быстро переходит в устойчивое состояние. По результатам расчета поперечного ускорения, когда управление не добавлялось, предел поперечного ускорения в установившемся режиме составлял 0,8 g. Напротив, когда было реализовано управление отрицательным углом развала на земле, которое пропорционально углу поворота рулевого колеса, его значение улучшилось до 0,9.г. Таким образом, характеристики предела прохождения поворотов значительно улучшаются благодаря управлению отрицательным углом развала, который пропорционален углу поворота рулевого колеса.
Напротив, когда было реализовано управление отрицательным углом развала на земле, которое пропорционально углу поворота рулевого колеса, его значение улучшилось до 0,9.г. Таким образом, характеристики предела прохождения поворотов значительно улучшаются благодаря управлению отрицательным углом развала, который пропорционален углу поворота рулевого колеса.
5. Эксперимент с использованием модели автомобиля для контроля угла развала, связанного с углом поворота рулевого колеса
Мы проверили результаты расчетов с помощью следующего эксперимента с использованием модели автомобиля. Используя дистанционно управляемую модель автомобиля, мы выяснили эффективность управления отрицательным развалом четырех колес, пропорциональную рулевому управлению.
5.1. Модель автомобиля
Модель автомобиля, использованная в эксперименте, показана на рисунке 11, а ее размеры указаны в таблице 4. Мы использовали батарею на 7,2 В, предназначенную для использования в моделях автомобилей, и перемещали модель автомобиля с помощью беспроводной связи по локальной сети. Угол схождения и угол развала можно было контролировать с помощью двигателя. Встроенное в модель измерительное оборудование позволило нам измерить боковое ускорение и скорость рыскания. Мы оценили управление углом развала, связанное с углом поворота руля, в эксперименте, в котором автомобиль двигался по кругу.
Угол схождения и угол развала можно было контролировать с помощью двигателя. Встроенное в модель измерительное оборудование позволило нам измерить боковое ускорение и скорость рыскания. Мы оценили управление углом развала, связанное с углом поворота руля, в эксперименте, в котором автомобиль двигался по кругу.
5.2. Метод, используемый для достижения контроля угла развала
Для достижения отрицательного контроля развала четырех колес, пропорционального рулевому управлению в модели автомобиля, мы контролировали угол развала, перемещая рычажный механизм с помощью серводвигателей на каждой из шин. Угол развала,
Рис. 10. Результаты моделирования.
Рис. 11. Модель автомобиля с дистанционным управлением.
Таблица 4. Технические характеристики модели автомобиля.
, модели автомобиля был установлен пропорциональным углу поворота рулевого колеса с передаточным отношением угла развала, в отличие от угла поворота при обычном рулевом управлении.
(27)
5.3. Экспериментальные условия
Эксперимент с моделью автомобиля проводился при движении автомобиля по кругу, как показано на рисунке 12. Эксперимент проводился в условиях с регулированием отрицательного угла развала и без него. Скорость модели автомобиля в эксперименте устанавливалась равной ее потенциальной критической крейсерской скорости в условиях с регулированием отрицательного угла развала и без него и устанавливалась такой, чтобы заданная скорость сохранялась. Таким образом, можно сказать, что эксперимент с моделью автомобиля проводился в критическом диапазоне прохождения поворотов. Эксперимент проводился случайным образом четырьмя испытуемыми, которые не были проинформированы о параметрах эксперимента.
5.4. Экспериментальные результаты
Репрезентативные результаты эксперимента, в котором автомобиль двигался по кругу, показаны на рисунке 13. Мы обнаружили, что при использовании отрицательного управления развалом, пропорционального рулевому управлению (±20˚), поперечное ускорение улучшилось примерно на 0,10 — 015 г по сравнению со случаем, когда контроль не осуществлялся. Кроме того, когда было реализовано управление углом развала, скорость составляла 2,3 м/с, тогда как скорость составляла 2,1 м/с в случае, когда управление углом развала не осуществлялось, что указывает на улучшенную потенциальную крейсерскую скорость при прохождении поворотов. Результаты эксперимента показывают, что скорость рыскания была выше при отрицательном управлении углом развала, пропорциональном рулевому управлению, чем без управления, из-за улучшенного поперечного ускорения, достигаемого за счет отрицательного управления углом развала. Этот эксперимент на модели автомобиля подтвердил, что устойчивость в поворотах улучшается за счет использования управления отрицательным углом развала пропорционально рулевому управлению.
Кроме того, когда было реализовано управление углом развала, скорость составляла 2,3 м/с, тогда как скорость составляла 2,1 м/с в случае, когда управление углом развала не осуществлялось, что указывает на улучшенную потенциальную крейсерскую скорость при прохождении поворотов. Результаты эксперимента показывают, что скорость рыскания была выше при отрицательном управлении углом развала, пропорциональном рулевому управлению, чем без управления, из-за улучшенного поперечного ускорения, достигаемого за счет отрицательного управления углом развала. Этот эксперимент на модели автомобиля подтвердил, что устойчивость в поворотах улучшается за счет использования управления отрицательным углом развала пропорционально рулевому управлению.
6. Заключение
Это исследование было сосредоточено на методе управления отрицательным углом развала на земле, который пропорционален рулевому управлению
Рис.
Рисунок 13. Экспериментальные результаты.
угол как метод улучшения маневренности и устойчивости для поддержки новой эры электромобилей, и его эффективность была выяснена. В результате было обнаружено, что управление углом развала может контролировать как момент рыскания, так и поперечное ускорение на пределе поворота в критическом диапазоне прохождения поворотов. Также было подтверждено, что как устойчивость, так и эффект рулевого управления в критическом диапазоне прохождения поворотов улучшаются за счет реализации управления отрицательным углом развала, которое пропорционально углу поворота рулевого колеса, с использованием исполнительных механизмов. Существенных улучшений в характеристиках предельного прохождения поворотов можно добиться, внедрив систему управления отрицательным углом развала, которая пропорциональна углу поворота рулевого колеса.
В результате было обнаружено, что управление углом развала может контролировать как момент рыскания, так и поперечное ускорение на пределе поворота в критическом диапазоне прохождения поворотов. Также было подтверждено, что как устойчивость, так и эффект рулевого управления в критическом диапазоне прохождения поворотов улучшаются за счет реализации управления отрицательным углом развала, которое пропорционально углу поворота рулевого колеса, с использованием исполнительных механизмов. Существенных улучшений в характеристиках предельного прохождения поворотов можно добиться, внедрив систему управления отрицательным углом развала, которая пропорциональна углу поворота рулевого колеса.
Справочные материалы
- Шибахата Ю., Шимада К. и Томари Т. (1993) Улучшение маневренности транспортного средства за счет прямого управления крутящим моментом. Журнал Общества автомобильных инженеров Японии, 47, 54-60. http://dx.doi.org/10.1080/00423119308969044
- Шибахата Ю., Курики Н.
 и Мори А. (1998) Разработка активной системы передачи крутящего момента. Журнал Общества автомобильных инженеров Японии, 52, 79-86.
и Мори А. (1998) Разработка активной системы передачи крутящего момента. Журнал Общества автомобильных инженеров Японии, 52, 79-86. - Shimada, K. and Shibahata, Y. (1994) Анализ динамических характеристик транспортного средства с помощью диаграммы момента β-Yaw — сравнение трех различных методов активного управления шасси. Труды Общества автомобильных инженеров Японии, 25, 122-127.
- Окубо, Н., Кано, Ю. и Абэ, М. (1994) О прямом управлении крутящим моментом для повышения активной безопасности управления транспортным средством. Труды ежегодной конференции Общества автомобильных инженеров Японии, октябрь 1994 г., стр. 117–120.
- Араи, М., Имура, С. и Йокояма, А. (2007) Разработка моторизованной системы прямого управления рысканием (1-й отчет) — Механизм и особенности моторизованной системы прямого управления рысканием. Материалы ежегодной конференции Общества автомобильных инженеров Японии, май 2007 г., стр. 13-16.
- Насу, Х., Хигаса, Х. и Йошимура, Т. (1996) Исследование управления движением экспериментального электромобиля. Труды Японского общества инженеров-механиков C, 62, 976-982. http://dx.doi.org/10.1299/kikaic.62.976
- Шино, М. и Нагаи, М. (2001) Комплексное управление прямым моментом рыскания и активным углом поворота. Материалы ежегодной конференции Общества автомобильных инженеров Япония, Иокогама, октябрь 2001 г., стр. 24-27.
- Такахаси, Н., Фуджимото, Х., Камачи, М. и Йошида, Х. (2007) Управление скоростью рыскания для полноприводного электромобиля на основе наблюдателя момента рыскания и оценки жесткости при прохождении поворотов. Материалы ежегодной конференции Общества автомобильных инженеров Японии, Иокогама, май 2007 г., стр. 5-8.
- Нодзаки, Х. и Сакаи, К. (1989) Квазистатический анализ критических характеристик автомобилей при сильном боковом G-повороте. Технический обзор Nissan, 26, 1-8.
- Пачейка Х.Б. (2012) Динамика шин и транспортных средств. 3-е издание, Баттерворт-Хайнеманн, Оксфорд.
- Абэ, М. (1988) О характеристиках прохождения поворотов автомобиля при ускорении и торможении (1-й отчет) Теоретический анализ и коэффициент расширенной устойчивости. Журнал Общества автомобильных инженеров Японии, 37, 134-140. http://dx.doi.org/10.1080/028418501127346846
- Мори, К. (1993) Анализ реакции автомобиля с четырьмя управляемыми колесами на рулевое управление при прохождении поворотов. Труды Японского общества инженеров-механиков C, 59, 112-117. http://dx.doi.org/10.1299/kikaic.59.1080
 и Мори А. (1998) Разработка активной системы передачи крутящего момента. Журнал Общества автомобильных инженеров Японии, 52, 79-86.
и Мори А. (1998) Разработка активной системы передачи крутящего момента. Журнал Общества автомобильных инженеров Японии, 52, 79-86. (1996) Исследование управления движением экспериментального электромобиля. Труды Японского общества инженеров-механиков C, 62, 976-982. http://dx.doi.org/10.1299/kikaic.62.976
(1996) Исследование управления движением экспериментального электромобиля. Труды Японского общества инженеров-механиков C, 62, 976-982. http://dx.doi.org/10.1299/kikaic.62.976
Коллапс-конвергенция — что это такое? Сделать развал-схождение
Всем автолюбителям хорошо известно, что даже незначительное вмешательство в ходовую часть автомобиля приведет к изменению углов установки колес, а следовательно, и к изменению поведения автомобиля на дороге. Параметры развала-схождения могут зависеть и от других факторов: износа резины, давления в шинах, люфта. Любой автомобиль приходит к такому состоянию, когда возникает необходимость ремонта передней подвески. А если производить самому, то велик риск нарушить такие параметры, как дезинтеграция, конвергенция. К чему может привести такое нарушение? Самые тяжелые последствия.
А если производить самому, то велик риск нарушить такие параметры, как дезинтеграция, конвергенция. К чему может привести такое нарушение? Самые тяжелые последствия.
Определение
Коллапс-конвергенция — что скрывается под этим определением? Это установка правого угла поворота колеса. Для обеспечения хорошей устойчивости и управляемости передние колеса необходимо устанавливать под определенным углом по отношению к подвеске и кузову автомобиля.
Крошащийся
Часто для регулировки подвески используют термин «столкновение-схождение». Что такое коллапс? Это угол между плоскостью, в которой вращается колесо, и вертикалью. Отрицательным считается такой развал, когда колеса верхнего борта наклонены внутрь. Положительный развал — это когда верхняя сторона колес наклонена наружу. Развал обеспечивает правильное положение колеса при работе подвески. С изменением наклона автомобиля меняется и развал. Если развал равен нулю, то шины изнашиваются минимально. Если отрицательный, то улучшается устойчивость автомобиля на поворотах. По размеру правый и левый развал должны быть максимально приближены друг к другу. В противном случае это может привести к уводу автомобиля с прямой траектории хода, а также к одностороннему износу рисунка протектора. Это только одна часть термина «коллапс-конвергенция».
По размеру правый и левый развал должны быть максимально приближены друг к другу. В противном случае это может привести к уводу автомобиля с прямой траектории хода, а также к одностороннему износу рисунка протектора. Это только одна часть термина «коллапс-конвергенция».
Конвергенция
Что такое конвергенция? Это угол между плоскостью, в которой вращается колесо, и направлением движения. Он обеспечивает правильное положение передних колес автомобиля при разных скоростях и углах поворота. Чаще всего схождение регулируется изменением длины боковых тяг руля.
Конструкция подвески большинства автомобилей позволяет регулировать развал, схождение колес, а также продольный наклон шкворня, являющегося осью вращения управляемого колеса автомобиля.
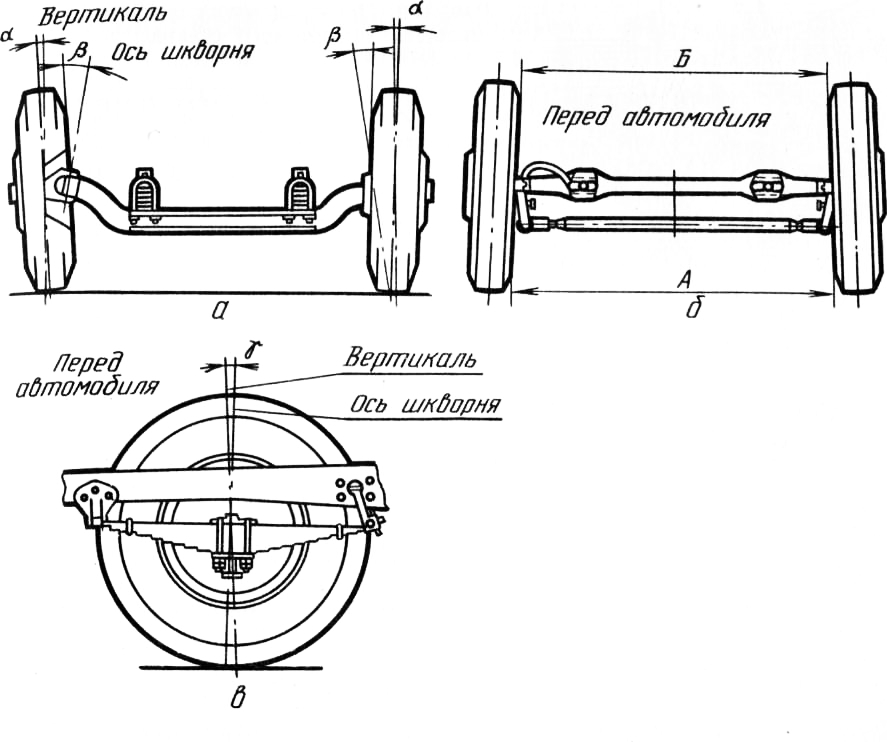
Кастер
Продольный наклон шкворня или шкворня — это угол между проекцией линии, проходящей через середину шаровых опор, на плоскость, параллельную продольной оси транспорта, и вертикалью. Такой наклон обеспечивает стабилизацию передних колес автомобиля в направлении прямолинейного движения. Его еще называют «кастер». Это очень важно, так как разница наклона для правого и левого колеса, превышающая допустимые значения, может привести к заносу в сторону менее важного колеса.
Его еще называют «кастер». Это очень важно, так как разница наклона для правого и левого колеса, превышающая допустимые значения, может привести к заносу в сторону менее важного колеса.
Разницу в стоимости кастера можно выразить таким параметром, как разница в его наклонах. Результат вычитания из большего значения меньшего колеса не должен быть больше 30 минут.
Продольный уклон облегчает самовыравнивание колес в зависимости от скорости автомобиля. Гонщики устанавливают это значение на пару градусов выше заводских настроек. Это делает ход транспорта более стабильным, а желание двигаться по прямой возрастает.
Характерными признаками отклонения от нормальных значений являются: визг шин при повороте, увод автомобиля при движении в сторону, односторонний износ рисунка протектора, неравномерное усилие при правых и левых поворотах на руль.
Угол движения характеризуется поворотом задней оси по отношению к оси симметрии автомобиля. Этот параметр очень важен и чем ближе его значение к нулю, тем лучше. Если значение положительное, значит, есть наклон вправо, а если отрицательное, то влево. Если есть отклонения больше допустимых значений, нужно срочно вмешиваться и доводить до нормы.
Если значение положительное, значит, есть наклон вправо, а если отрицательное, то влево. Если есть отклонения больше допустимых значений, нужно срочно вмешиваться и доводить до нормы.
Перед тем, как сделать развал, необходимо убедиться, что давление в шинах нормальное, износ протектора на обоих колесах примерно одинаковый, нет люфта в рулевом управлении и подшипниках, колесные диски не деформированы, нет необходимо отремонтировать подрамник автомобиля.
Рулевое колесо на прямой неровно
Эта проблема может быть вызвана несколькими причинами:
- Увеличен свободный ход рулевого управления.
- Автомобиль имеет поворот заднего моста. То есть нужно держать спину и сворачивать-сходить. Это исправит ситуацию.
- В развале задних колес может быть слишком большая разница.
- Существует разница в давлении задних и передних колес.
- Имеются невидимые дефекты ходовой части, которые не проявлялись до проведения развал-схождения.
Если кроме наклона руля имеет место еще и отклонение транспорта в сторону, то необходимо сначала выяснить и устранить причину, вызывающую это отклонение, и только потом установить правильное положение руля .
Машину ведет в сторону, хотя развал
Что это может быть в таком случае?
1. Необходимо проверить действие резины. Для этого передние колеса меняются местами. Если после этого действия отвод меняет направление, то все дело в резине. Вам нужно поменять все колеса по кругу и искать пару, на которой машина будет ехать плавно. После этого выравнивается направление вращения колес. В последнее время такая причина ухода встречается очень часто. И всему виной качество шин.
2. Дисбаланс колес можно увеличить. Колеса скручены.
3. Проведена проверка и такого параметра, как развал-схождение, только на передней оси. Также необходимо проверить задний мост, так как причина неисправности может быть именно в нем.
4. Имеются скрытые нарушения ходовой части автомобиля, не выявленные до регулировки.
Перед регулировкой машину не забирал, но резина быстро изнашивалась, а потом появился увод.
Здесь, как и в предыдущем пункте, причина кроется, скорее всего, в резине. Раньше машина ехала ровно, так как увод, создаваемый резиной, уравновешивался заносом, созданным из-за неправильно выполненной развал-схождения. ВАЗ к этому склонен. После устранения одной причины произошел уход в сторону.
Тугой руль
Причин этой проблемы может быть несколько:
- Неправильная регулировка. Нам нужно снова сделать выравнивание.
- При ремонте установлены очень тугие рулевые тяги или шаровые опоры.
- В шинах слишком низкое давление воздуха.
- Вылет дисков не соответствует рекомендованному производителем.
Какова процедура коллапса-конвергенции?
У многих возникает вопрос: нужно ли делать разборку? Для человека, который давно водит машину, ответ на него очевиден. Кто хоть раз ездил на машине с правильно отрегулированными колесами, тот лучше почувствует машину при езде, и даже заметит малейшее отклонение поворотов.
Человек за рулем должен отдыхать и получать удовольствие от процесса вождения. Именно для этого инженеры и придумали углы установки колес. Ведь водителю в дороге должно быть комфортно и максимально безопасно.
Автомобиль, у которого правильно отрегулированы углы установки колес, имеет:
- Хорошую курсовую устойчивость, то есть отклонения от прямолинейного движения минимальны.
- Хорошая маневренность и управляемость, а также комфорт при вождении.
- Меньшая склонность к заносу, а также к опрокидыванию в опасных ситуациях.
- Экономия топлива и минимальный износ шин.
- Хорошее падение.
Автомобиль, который сильно нарушил повороты, наоборот, может подвести водителя в любой момент. Например, при езде по сухому покрытию все может быть в порядке, но как только машина попадет на скользкий или мокрый участок дороги, она может неожиданно пойти не туда, где надо. Приходится постоянно подгонять машину. И тем самым становится опасным не только для водителя, но и для окружающего транспорта, а также пешеходов. Часто неправильная регулировка приводит к печальным последствиям. Поэтому лучше сделать разбивку. ВАЗ самый популярный в России, и все мастера легко настроят. Другие марки также хорошо поддаются правильной регулировке угла наклона колес. Во всех развитых странах это обязательный пункт техосмотра.
Часто неправильная регулировка приводит к печальным последствиям. Поэтому лучше сделать разбивку. ВАЗ самый популярный в России, и все мастера легко настроят. Другие марки также хорошо поддаются правильной регулировке угла наклона колес. Во всех развитых странах это обязательный пункт техосмотра.
Еще один очень важный момент, это то, что при покупке автомобиля с рук рекомендуется проверить его на исправность ходовой части, т.к. большинство продаваемых автомобилей в прошлом подвергались авариям. Есть даже образцы, которые собраны из двух разных половинок, и сварены они не лучшим образом.
Когда проверять развал-схождение
1. После ремонта ходовой части автомобиля, когда были заменены какие-либо детали.
2. После любых работ, ведущих к изменению дорожного просвета.
3. Если произошло увод машины в сторону или руль изменил свое положение при прямолинейном движении.
4. Автомобиль слишком туго управляемый или, наоборот, слишком легкий, плохо держит дорогу.