что это такое, как работает, для чего нужно, возможные проблемы, плюсы и минусы
История Can шины
Мало кто знает, что самые первые автомобили не имели абсолютно никакой электрики. Все что нужно было тогдашним водителям – это специальное магнитоэлектрическое приспособление для запуска мотора, которое способно было из кинетической выработать электроэнергию. Не мудрено, что такая примитивная система доставляла некие неудобства и соответственно постоянно модернизировалась.
Так из года в год, проводов и соответственно различных датчиков становилось все больше. Дошло до того, что по электрическому оснащению автомобиль уже начали сравнивать с самолетом. Именно тогда в 1970 году, стало очевидно – для бесперебойной работы, все цепи нужно рационализировать. Спустя 13 лет, ситуацию под свой контроль взял уже культовый бренд из Германии под названием Bosch. Как следствие, в 1986 году в Детройте был представлен инновационный протокол Controller Area Network (CAN).
Однако, даже после официальной презентации, наработка оставалась мягко говоря «сыроватой», поэтому работа над ней продолжалась.
1987 г. – завершились практические тесты can шины, которые вызвались провести не менее знаменитые бренды в сфере компьютерных технологий Philips и Intel.
1988 г. – уже на следующий год еще один немецкий автогигант BMW представил первый автомобиль, работающий по технологии can шины, это была любимая всеми модель 8-серии.
1993 г. – международное признание и соответственно сертификат «ИСО».
2001 г. – кардинальные перемены в стандартах, теперь любой европейский автомобиль должен функционировать по принципу «КАН».
2012 г. – последнее обновление механизма, которое увеличило список совместимых устройств и скорость передачи данных.
Вот такой вот длинный путь прошел наш «директор» электрических приборов. Сами видите стаж не малый, поэтому столь высокое положение абсолютно по делу).
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Что такое CAN шина?
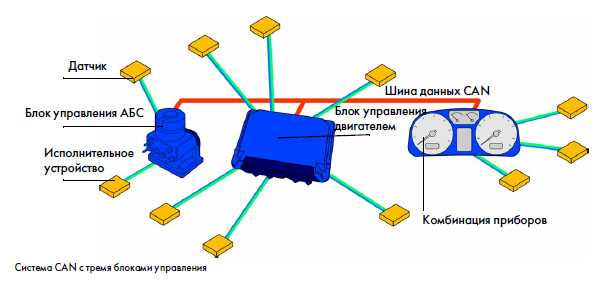
CAN-шина – это одно из устройств в электронной автоматике автомобиля, на которое возлагается задача по объединению различных датчиков и процессоров в общую синхронизированную систему. Она обеспечивает сбор и обмен данными, посредством чего в работу различных систем и узлов машины вносятся необходимые корректировки.
Аббревиатура CAN расшифровывается как Controller Area Network, то есть сеть контроллеров. Соответственно, CAN-шина – это устройство, принимающее информацию от устройств и передающее между ними. Данный стандарт был разработан и внедрён более 30 лет назад компанией Robert Bosch GmbH. Сейчас его используются в автомобилестроении, промышленной автоматизации и сфере проектирования объектов, обозначаемых «умными», например, домов.
Как работает CAN шина
Фактически, шина представляет собой компактное устройство со множеством входов для подключения кабелей или разъём, к которому подсоединяются кабели.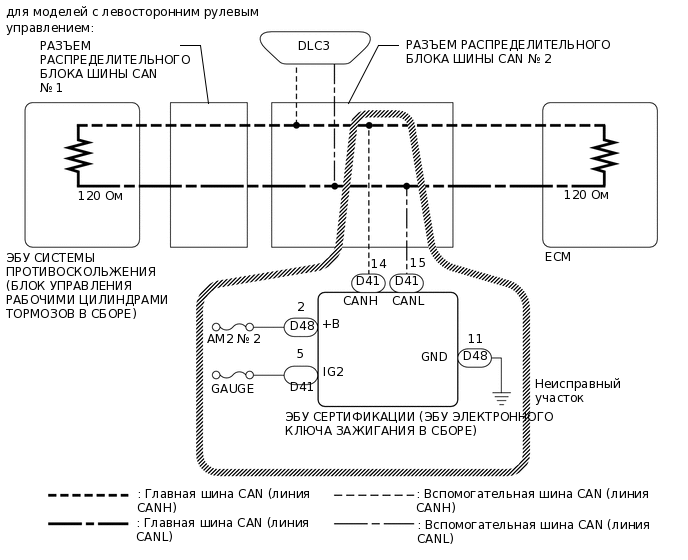 Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы.
Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы.
Для передачи разной информации в сообщения включаются идентификаторы. Они уникальны и сообщают, например, что в конкретный момент времени автомобиль едет со скоростью 60 км/ч. Серия сообщения отправляется на все устройства, но благодаря индивидуальным идентификаторам они обрабатывают только те, которые предназначаются именно для них. Идентификаторы CAN-шины могут иметь длину от 11 до 29 бит.
В зависимости от назначения КАН шины разделяются на несколько категорий:
- Силовые. Они предназначены для синхронизации и обмена данными между электронным блоком двигателя и антиблокировочной системой, коробкой передач, зажиганием, другими рабочими узлами автомобиля.
- Комфорт. Эти шины обеспечивают совместную работу цифровых интерфейсов, которые не связаны с ходовыми блоками машины, а отвечают за комфорт. Это система подогрева сидений, климат-контроль, регулировка зеркал и т.
 п.
п. - Информационно-командные. Эти модели разработаны для оперативного обмена информацией между узлами, отвечающими за обслуживание авто. Например, навигационной системой, смартфоном и ЭБУ.
 п.
п.Для чего CAN шина в автомобиле
Распространение интерфейса КАН в автомобильной сфере связано с тем, что он выполняет ряд важных функций:
- упрощает алгоритм подсоединения и функционирования дополнительных систем и приборов;
- снижает влияние внешних помех на работу электроники;
- обеспечивает одновременное получение, анализ и передачу информации к устройствам;
- ускоряет передачу сигналов к механизмам, ходовым узлам и иным устройствам;
- уменьшает количество необходимых проводов;
В современном автомобиле цифровая шина обеспечивает работу следующих компонентов и систем:
- центральный монтажный блок и замок зажигания;
- антиблокировочная система;
- двигатель и коробка переключения передач;
- подушки безопасности;
- рулевой механизм;
- датчик поворота руля;
- силовой агрегат;
- электронные блоки для парковки и блокировки дверей;
- датчик давления в колёсах;
- блок управления стеклоочистителями;
- топливный насос высокого давления;
- звуковая система;
- информационно-навигационные модули.

Этот не полный список, так как в него не включаются внешние совместимые приборы, которые тоже можно соединить с шиной. Часто таким образом подключается автомобильная сигнализация. CAN-шина также доступна для подключения внешних устройств для мониторинга рабочих показателей и диагностики на ПК. А при подключении автосигнализации вместе с маяком можно управлять отдельными системами извне, например, со смартфона.
Возможные проблемы с CAN шиной
По причине включения во многие функциональные процессы, неполадки в работе CAN-шины проявляются очень быстро. Среди признаков нарушений чаще всего проявляются:
- индикация вопросительного знака на приборной панели;
- одновременное свечение нескольких лампочек, например, CHECK ENGINE и ABS;
- исчезновение показателей уровня топлива, оборотов двигателя, скорости на приборной панели.
Такие проблемы возникают по разным причинам, связанным с питанием или нарушением электроцепи. Это может быть замыкание на массу или аккумулятор, обрыв цепи, повреждение перемычек, падение напряжения из-за проблем с генератором или разряд АКБ.
Это может быть замыкание на массу или аккумулятор, обрыв цепи, повреждение перемычек, падение напряжения из-за проблем с генератором или разряд АКБ.
Первая мера для проверки шины – компьютерная диагностика всех систем. Если она показывает шину, необходимо измерить напряжение на выводах H и L (должно быть ~4V) и изучить форму сигнала на осциллографе под зажиганием. Если сигнала нет или он соответствует напряжению сети, налицо замыкание или обрыв.
Ввиду сложности системы и большого количества подключений компьютерную диагностику и устранение неисправностей целесообразно передать в руки специалистов с высококачественным оборудованием.
Плюсы и минусы CAN шины
Специалисты по автомобильной электронике, высказываясь в пользу использования CAN-интерфейса, отмечают следующие преимущества:
Управление автомобилем по CAN / Хабр
Введение
Беспилотный автомобиль StarLine на платформе Lexus RX 450h — научно-исследовательский проект, стартовавший в 2018 году. Проект открыт для амбициозных специалистов из Open Source Community. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
Проект открыт для амбициозных специалистов из Open Source Community. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
К таким модулям относятся:
- модуль позиционирования автомобиля в пространстве с помощью GPS-координат;
- модуль управления рулем, ускорением и торможением авто;
- модуль состояния систем автомобиля: скорость, ускорение, положение руля, нажатие на педали и т.д.;
- модуль получения информации об окружении автомобиля. С этим справятся ультразвуковые датчики, камеры, радары и лидары.
Прежде всего перед нашей командой стояла задача научиться управлять рулем, ускорением и торможением автомобиля. А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
Теоретическая часть
Что такое CAN-шина
В современных автомобилях управление всеми системами взяли на себя электронные блоки (Рис. 1.). Электронные блоки — это специализированные компьютеры, каждый из которых имеет все необходимые интерфейсы для интеграции с автомобилем. С помощью цифровых интерфейсов связи, блоки объединяются в сеть для обмена информацией друг с другом. Самые распространенные цифровые интерфейсы в автомобилях — CAN, LIN, FLEXRay. Из них наибольшее распространение получил именно CAN.
CAN (Controller Area Network) шина — это промышленный стандарт сети. В 1986 году этот стандарт разработали в компании Bosch. А первым автомобилем с CAN-шиной стал Mercedes-Benz W140, выпущенный в 1991 году. Стандарт разрабатывался для возможности устройствам общаться друг с другом без хоста. Обмен информацией осуществляется с помощью специальных сообщений, которые состоят из полей ID, длины сообщения и данных. Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
Рис. 1. Шина CAN автомобиля.
На физическом уровне шина представляет собой витую пару из медных проводников. Сигнал передается дифференциально, за счет чего достигается высокая помехоустойчивость.
Рис. 2. Физическое представление сигнала в CAN шине
Посредством CAN шины можно получать информацию о состоянии различных датчиков и системах автомобиля. Также по CAN можно управлять узлами автомобиля. Именно эти возможности мы и используем для своего проекта.
Мы выбрали Lexus RX, потому что знали, что сможем управлять всеми необходимыми узлами по CAN. Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.
Правильно управлять автомобилем — означает понимать, как работают механические части систем автомобиля. Нам было необходимо хорошо понимать, как правильно работать с электроусилителем или управлять замедлением автомобиля. Ведь, например, при повороте колеса создают сопротивление на рулевое управление, что вносит свои ограничения на управление при повороте. Некоторые системы невозможно использовать без ввода авто в специальные рабочие режимы. Эти и другие детали нам пришлось изучать в процессе работы.
Электроусилитель руля
Электроусилитель руля EPS (Electric Power Steering) — система, предназначенная снизить усилие на руль при повороте (Рис. 3). Приставка «электро» говорит о типе системы — электрическая. Управление рулем с этой системой становится комфортным, водитель поворачивает руль в нужном направлении, а электродвигатель помогает довернуть его до необходимого угла.
Электроусилитель устанавливается на рулевой вал автомобиля, части которого соединены между собой торсионным валом. На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
Рис. 3. Схематичное изображение системы электроусилителя руля
Видео: cистема LKA рулит автомобилем с помощью системы EPS.
Электронная педаль газа
Дроссельная заслонка — это механизм регулировки количества топливной смеси, которая попадет в двигатель. Чем больше смеси попадет, тем быстрее едет автомобиль.
Электронная педаль газа — это система, которая задействует работу нескольких электронных узлов. Сигнал о положении педали, при ее нажатии, поступает в блок управления двигателем ECM (Engine Control Module).
Рис. 4. Система электронной педали газа.
Видео: Для работы круиз-контроля используется управление электронной педалью газа.
Электронные системы помощи водителю
Мы купили автомобиль, который оборудован множеством цифровых блоков и систем помощи водителю (ADAS). В нашем проекте мы используем LKA, ACC и PCS.
LKA (Lane Keep Assist) — это система удержания в полосе, которая состоит из фронтальной камеры и вычислительного блока. LKA удерживает автомобиль в полосе движения, когда водитель, например, отвлекся. Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе.
ACC (Adaptive Cruise Control) — система адаптивного круиз-контроля, который позволяет выставить заданную скорость следования. Автомобиль сам ускоряется и притормаживает для поддержания нужной скорости, при этом водитель может убрать ногу с педалей газа и тормоза. Этот режим удобно использовать при езде по скоростным магистралям и автострадам. Адаптивный круиз контроль способен видеть препятствия впереди автомобиля и притормаживать для избежания столкновения с ними. Если впереди автомобиля едет другое транспортное средство с меньшей скоростью, ACC сбавит скорость и будет следовать за ним. При обнаружении статичного объекта, ACC сбавит скорость до полной остановки.
PCS (Pre-Collision System) — система предотвращения столкновения. Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Практическая часть
Управление рулем
Первое, что захотелось сделать нашей команде, — это научиться рулить. Рулем в автомобиле могут управлять две системы: парковочный ассистент IPAS (Intelligent Park Assist) и LKA.
IPAS позволяет задавать напрямую угол поворота рулевого колеса в градусах. Так как в нашем автомобиле нет данной системы, проверить и освоить рулевое управление таким способом нельзя.
Поэтому мы изучили электрические схемы автомобиля и поняли, какие CAN-шины могут быть полезны. Мы подключили анализатор CAN-шины. Лог содержит файл записей сообщений в шине в хронологической последовательности. Наша задача была найти команды управления электроусилителем руля EPS (Electric Power Steering). Мы сняли лог поворота рулевого колеса из стороны в сторону, в логе смогли найти показания угла поворота и скорость вращения рулевого колеса. Ниже пример изменения данных в шине CAN. Интересующие нас данные выделены маркером.
Поворот руля влево на 360 градусов
Поворот руля вправо на 270 градусов
Следующим этапом мы исследовали систему удержания в полосе. Для этого мы выехали на тихую улицу и записали логи обмена между блоком удержания в полосе и DSU (Driving Support ECU). С помощью анализатора шины CAN нам удалось вычислить сообщения от системы LKA. На рисунке 6 изображена команда управления EPS.
Рис. 5. Команда управления рулем с помощью системы LKA
LKA управляет рулем путем задания значения момента на валу (STEER_TORQUE_CMD) рулевого колеса. Команду принимает модуль EPS. Каждое сообщение содержит в заголовке значение счетчика (COUNTER), которое инкрементируется при каждой отправке. Поле LKA_STATE содержит информацию о состоянии LKA. Для захвата управления необходимо выставлять бит STEER_REQUEST.
Сообщения, которые отвечают за работу важных систем авто, защищаются контрольной суммой (CHECKSUM) для минимизации рисков ложного срабатывания. Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
На графике (Рис. 6.) представлена диаграмма работы LKA. Torque Sensor — значение с датчика момента на торсионном валу. Torque Cmd — команда от LKA для управления рулем. Из картинки видно, как происходит подруливание LKA для удержания автомобиля в полосе. При переходе через ноль меняется направление поворота руля. Т.е. отрицательное значение сигнала говорит о повороте вправо, положительное — влево. Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.
Рис. 6. График работы системы LKA
Нам предстояло проверить работу команды управления рулем. С помощью модуля StarLine Сигма 10 мы подготовили прошивку для проверки управления. StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
Рис. 7. Первые попытки рулить
На видео видно, что управление осуществляется короткими секциями. Это возникает по нескольким причинам.
Первая из причин — это отсутствие обратной связи. Если расхождение между сигналом Torque Cmd и Torque Sensor превышает определенное значение Δ, система автоматически перестает воспринимать команды (Рис. 8). Мы настроили алгоритм на корректировку выдаваемой команды (Torque CMD) в зависимости от значения момента на валу (Torque Sensor).
Рис. 8. Расхождение сигнала приводит к ошибке работы системы
Следующее ограничение связано с системой защиты встроенной в EPS. Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Рис. 9. Превышение порогового значения регулировки момента на валу
Независимо от того, активирована система LKA или нет, сообщения с командами от нее присутствуют в шине постоянно. Мы посылаем модулю EPS команду повернуть колеса с конкретным усилием влево или вправо. А в это время LKA перебивает наши посылки «пустыми» сообщениями. После нашей команды со значением момента, приходит штатная с нулевым (Рис. 10).
Рис. 10. Штатные сообщения приходят с нулевыми значениями момента и перебивают наше управление
Тогда мы, с помощью модуля StarLine Сигма 10, смогли фильтровать весь трафик от LKA и блокировать сообщения с ID 2E4, когда нам это было нужно. Это решило проблему, а нам удалось получить плавное управления рулем (Рис. 2, ACCEL_CMD = 1000 (0x03E8).
2, ACCEL_CMD = 1000 (0x03E8).
Рис. 12. Команда управления ускорения/замедления автомобиля
Мы сняли логи со штатной системы ACC и проанализировали команды. Сравнили с имеющимся у нас описанием команд и приступили к тестированию.
Рис. 13. Лог управления ускорением/замедлением системы адаптивного круиз-контроля ACC (выделено маркером)
Здесь не обошлось без трудностей. Мы выехали на дорогу с оживленным трафиком для тестирования команды ускорения. Команды управления ускорением или замедлением автомобиля работают только при активированном круиз контроле, не достаточно активировать его кнопкой. Необходимо найти движущийся впереди автомобиль и включить режим следования за ним.
Рис. 14. Активация круиз контроля происходит при наличии впереди другого траснпортного средства
С помощью модуля StarLine Сигма 10 посылаем команду ускорения, и автомобиль начинает набирать скорость. К этому моменту мы подключили графический интерфейс для управления модулем StarLine Сигма 10. Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Команды работали до тех пор, пока не потеряли автомобиль впереди. Система круиз-контроля отключилась, а следовательно, и команды ускорения перестали работать.
Мы приступили к исследованию возможности использовать команды без активного круиз-контроля. Пришлось много времени потратить на анализ данных в шине CAN, чтобы понять как создать условия для работы команд. Нас интересовало, в первую очередь, какой блок блокирует выполнение команд ACC на ускорение или замедление. Пришлось изучить какие ID идут от DSU, LKA, радара и камеры, подсовывая липовые данные различных датчиков.
Решение пришло спустя 3 недели. К тому времени мы представляли как происходит взаимодействие блоков автомобиля, провели исследование трафика сообщений и выделили группы сообщений, посылаемых каждым блоком. За работу адаптивного круиз-контроля ACC отвечает блок Driving Support ECU (DSU). DSU выдает команды на ускорение и замедление автомобиля, и именно этот блок получает данные от радара миллиметрового диапазона. Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Наша идея заключалась в подмене данных радара. Мы сняли лог следования за автомобилем, вытащили из него данные радара в момент следования. Теперь, после включения круиз-контроля, мы посылаем фейковые данные о наличии впереди идущего авто. Получается обманывать наш автомобиль, говоря что впереди движется другое авто на конкретном расстоянии.
a) б)
Рис. 15. Активация круиза: a) попытка активировать без подмены данных радара; б) активация при подмене данных от радара.
Когда запускаем нашу обманку, на приборной панели загорается значок наличия впереди идущего автомобиля. Теперь мы можем тестировать наше управление. Запускаем команду на ускорение, и автомобиль начинает быстро ускоряться.
Как мы уже узнали, команда на ускорение и замедление одна. Поэтому тут же проверили и замедление. Поехали на на скорости с активным круиз-контролем, запустили команду на торможение, и авто сразу же замедлилось.
В итоге сейчас получается разгонять и замедлять автомобиль именно так, как нам было нужно.
Цель достигнута.
Что еще мы используем
Для создания беспилотника необходимо управление вспомогательными системами: поворотниками, стоп-сигналами, аварийной сигнализацией, клаксоном и пр. Всем этим так же можно управлять по CAN шине.
Оборудование и ПО
Для работ с автомобилем сегодня мы используем набор различного оборудования:
- Анализатор шины Marathon позволяет подключать и читать данные с двух шин одновременно. На сайте производителя анализатора есть бесплатное ПО для анализа логов. Но мы используем ПО, написанное в нашей компании для внутреннего пользования.
- Модуль StarLine Сигма 10 мы используем как платформу для работы с цифровыми интерфейсами. Модуль поддерживает CAN и LIN интерфейсы. При исследовании автомобиля пишем программы на C, зашиваем их в модуль и проверяем работу. Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.
- Диагностическое оборудование Toyota/Lexus. С помощью этого оборудования можно найти команды управления системами автомобиля: поворотниками, стоп-сигналами, клаксоном, индикацией приборки.
 Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.
Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.Сегодня ведется активная работа по разработке беспилотного автомобиля, в ближайших планах реализация экстренного торможения перед препятствиями, их объезда и перестраивание маршрута автомобиля в зависимости от дорожной ситуации и указаний водителя.
Беспилотный автомобиль StarLine — это открытая площадка для объединения лучших инженерных умов России и мира с целью создания прогрессивных технологий беспилотного вождения, которые сделают наше будущее безопасным и комфортным.
GitLab проекта
10 наиболее частых причин спущенной шины
Большинство водителей хоть раз в жизни сталкивались с проколом шины. Если вы были в такой неудачной ситуации, вам знакомо чувство утопания, когда вы видите свой автомобиль со спущенной шиной. Выбросы, происходящие на дороге поздно ночью или в ненастную погоду, больше, чем неудобство; они часто создают ситуацию, которая может серьезно угрожать безопасности водителя. Не существует надежного способа предотвратить спущение шин, но общее техническое обслуживание шин и осознание основных причин могут помочь уменьшить возникновение таких ситуаций.
Если вы были в такой неудачной ситуации, вам знакомо чувство утопания, когда вы видите свой автомобиль со спущенной шиной. Выбросы, происходящие на дороге поздно ночью или в ненастную погоду, больше, чем неудобство; они часто создают ситуацию, которая может серьезно угрожать безопасности водителя. Не существует надежного способа предотвратить спущение шин, но общее техническое обслуживание шин и осознание основных причин могут помочь уменьшить возникновение таких ситуаций.
1) Прокол острым предметом
Наиболее распространенной причиной спущенной шины является прокол острым предметом, например гвоздями или стеклом. По возможности избегайте проколов, объезжая мусор на дороге или на парковках.
2) Выход из строя или повреждение штока клапана
Проблемы со штоком клапана являются еще одной распространенной причиной проблем с шинами. Стержень клапана — это крошечный выступ на шине, который вы отвинчиваете, когда вам нужно накачать ее. Поврежденный или корродированный шток клапана может привести к утечке воздуха из шины, что приведет к ее сдуванию. Ослабленные или забитые грязью стержни также могут привести к потере воздуха из шин.
3) Протертая или лопнувшая шина
Изношенная или лопнувшая шина может создать опасную ситуацию для вас и других водителей на дороге. Обязательно всегда проверяйте шины на наличие повреждений, таких как глубокие потертости или изношенные участки или неравномерный износ на одной стороне шины.
4) Утечки борта шины
Иногда происходит утечка воздуха из борта шины, который представляет собой край шины, опирающийся на обод. Эта утечка может привести к тому, что шина со временем станет плоской. Чтобы проверить, есть ли проблема с бортом шины, опрыскайте колеса и систему клапанов мыльной водой. Если появляется устойчивый поток крошечных пузырьков, у вас, вероятно, есть утечка борта шины.
5) Вандализм
Как правило, вандализм состоит в том, что кто-то выпускает воздух из ваших шин, что легко исправить и не требует замены: просто накачайте шину и будьте осторожны при парковке автомобиля. в будущем.
в будущем.
6) Разделение шины и обода при столкновении с другим объектом
Этот тип разделения обычно происходит, когда шина наезжает на бордюр или если вы резко третесь колесом о тротуар во время парковки. Шина слегка соскальзывает с обода, что со временем вызывает медленную потерю воздуха. Как правило, это не то, что вы можете исправить самостоятельно, но у опытного автомеханика есть инструменты, которые легко позаботятся об этом.
7) Шины с избыточной накачкой
Шины с избыточной накачкой могут создать опасную ситуацию с давлением, что часто приводит к разрыву. Чтобы узнать, как правильно проверить давление в шинах, ознакомьтесь с этим подробным руководством.
8) Утечки легкосплавных дисков
Владельцам автомобилей с алюминиевыми дисками рекомендуется регулярно проверять давление в шинах. Если утечка становится повторяющейся проблемой, обратитесь к механику для профессионального ремонта.
9) Дорожные опасности
Выбоины, неровности дороги и неожиданный мусор могут повредить колеса, оси и ходовую часть автомобиля.
10) Неожиданное повреждение
Иногда невозможно предотвратить спущение шины. Всегда ведите машину безопасно и осторожно и следуйте надлежащим процедурам, если вы столкнулись с неожиданной аварией на дороге: не нажимайте на тормоза, дайте автомобилю замедлиться естественным образом, поворачивая его на обочину, включите аварийные огни и не пытайтесь заменить шину самостоятельно, если вы не находитесь в нескольких футах от движущегося транспорта.
К счастью, дороги в Южной Калифорнии широкие и содержатся в хорошем состоянии, что обеспечивает в целом плавное вождение. Тем не менее, спущенная шина может случиться с каждым, поэтому важно сохранять бдительность, когда речь идет об обслуживании и безопасности автомобиля. Если у вас спустила шина и вам нужна помощь профессионала или вам требуется замена, дружная команда Evans Tire готова помочь. Звоните сегодня!
Звоните сегодня!
Служба автомобильных шин в Сан-Хосе, Калифорния
Если вашему автомобилю требуется балансировка, перестановка или замена шин или вы заметили неравномерный износ протектора, посетите Premier Nissan of San Jose в Сан-Хосе, Калифорния, для осмотра шин уже сегодня!
Шины на вашем автомобиле являются одним из наиболее важных элементов безопасности, которым оснащен ваш автомобиль. Следовательно, крайне важно, чтобы они поддерживались с регулярным, надлежащим обслуживанием. Следуя графику обслуживания Nissan и рекомендациям производителя шин по давлению в шинах, вы улучшите ускорение, управляемость, расход топлива, сэкономите деньги и тормозите. Учитывая, что так много аспектов работы вашего автомобиля напрямую связаны с вашими шинами, легко понять, почему обслуживание шин так важно. Мы в Premier Nissan of San Jose хотим, чтобы вы были в безопасности на дорогах Сан-Хосе, Калифорния.
Служба перестановки шин
Если вам приходится бороться с рулевым колесом, чтобы сохранить положение вашего автомобиля в полосе движения, вполне возможно, что одна или несколько ваших шин не выровнены.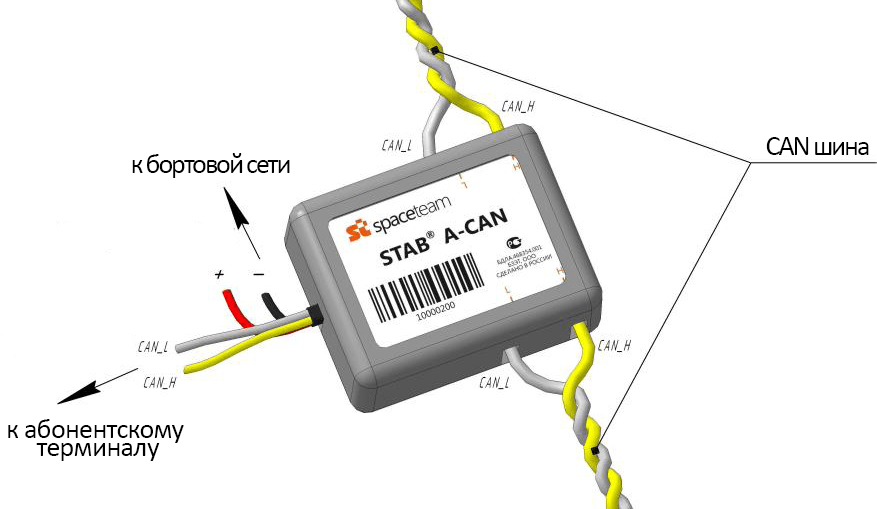 Это может быть результатом наезда на выбоину или наезда на бордюр. Однако эти симптомы также могут быть результатом повреждения шины или неравномерного износа. Если причиной является последнее, эксплуатация вашего автомобиля с шинами с истекшим сроком годности представляет угрозу безопасности и должна быть немедленно устранена сертифицированным специалистом. Как следует из нашего названия, мы специализируемся на обслуживании автомобилей Nissan, но мы рады обслуживать все марки автомобилей. Если на вашем автомобиле наблюдается одно из следующих явлений, возможно, шины нуждаются в перестановке, балансировке, выравнивании или замене:
Это может быть результатом наезда на выбоину или наезда на бордюр. Однако эти симптомы также могут быть результатом повреждения шины или неравномерного износа. Если причиной является последнее, эксплуатация вашего автомобиля с шинами с истекшим сроком годности представляет угрозу безопасности и должна быть немедленно устранена сертифицированным специалистом. Как следует из нашего названия, мы специализируемся на обслуживании автомобилей Nissan, но мы рады обслуживать все марки автомобилей. Если на вашем автомобиле наблюдается одно из следующих явлений, возможно, шины нуждаются в перестановке, балансировке, выравнивании или замене:
- Плохое обращение
- Дрейф на полосе
- Аквапланирование
- Отклонение в сторону
- Низкий расход бензина
- Увеличенный тормозной путь
- Плохое ускорение
При наличии видимых повреждений, проколов или неравномерного износа рисунка протектора вам следует сегодня же доставить свой автомобиль в Premier Nissan в Сан-Хосе для сертифицированного ремонта. Наша сервисная команда проверит ваши шины на наличие повреждений, проплешин, неравномерного износа и проколов, а также повернет, отбалансирует и установит все четыре угла. Наш дилерский центр Nissan также может устранить небольшие дыры, крошечные утечки и другие мелкие повреждения, а также заменить любые шины, представляющие опасность для вашей безопасности. Пока вы ждете, мы предлагаем вам воспользоваться бесплатными удобствами, которые мы предлагаем нашим клиентам для вашего комфорта и удовольствия. Поэтому в следующий раз, когда вашему автомобилю понадобится шиномонтаж в Сан-Хосе, Калифорния, доставьте свой автомобиль в Premier Nissan of San Jose.
Наша сервисная команда проверит ваши шины на наличие повреждений, проплешин, неравномерного износа и проколов, а также повернет, отбалансирует и установит все четыре угла. Наш дилерский центр Nissan также может устранить небольшие дыры, крошечные утечки и другие мелкие повреждения, а также заменить любые шины, представляющие опасность для вашей безопасности. Пока вы ждете, мы предлагаем вам воспользоваться бесплатными удобствами, которые мы предлагаем нашим клиентам для вашего комфорта и удовольствия. Поэтому в следующий раз, когда вашему автомобилю понадобится шиномонтаж в Сан-Хосе, Калифорния, доставьте свой автомобиль в Premier Nissan of San Jose.
Как продлить срок службы шин
Premier Nissan из Сан-Хосе 1120 Вт Capitol Expy Сан-Хосе, Калифорния 95136 Проложить маршрут
- Продажи
- Служба
- Детали
Телефон: (877) 706-0223
Воскресенье:
10:00 — 19:00
Понедельник:
9:00 — 20:00
9:0003 Вторник: — 20:00Среда:
9:00 — 20:00
Четверг:
9:00 — 20:00
Пятница:
9:00 — 20:00
Суббота:
9:00 — 20:00
Телефон: (488) 1234
Воскресенье:
Закрыт
Понедельник:
7:30 — 18:00
Вторник:
7:30 — 18:00
Среда:
7:30 — 6 утра — 18:00
:
7:30 — 6 утра — 18:00
:
7:30 — 6 утра.