
Что такое самоблок
21.02.2017 08:00
Что такое самоблокирующийся червячный дифференциал?
Самоблокирующийся червячный дифференциал (самоблок) — устройство, которое позволяет частично компенсировать главный недостаток свободного дифференциала, а именно его полную беспомощность при наезде одного колеса на скользкое покрытие. По принципу работы, самоблокирующиеся дифференциалы можно разделить на два типа: speed sensitive, то есть срабатывающих от разницы в угловых скоростях вращения полуосей, и torque sensitive — срабатывающих от разницы передаваемого на полуоси крутящего момента. Для понимания работы самоблока сначала разберёмся с принципом работы обыкновенного дифференциала и его недостатками.
Дифференциал — это механическое устройство, которое передает крутящий момент с одного источника на два независимых потребителя таким образом, что угловые скорости вращения источника и обоих потребителей могут быть разными относительно друг друга.
Принцип работы обыкновенного дифференциала
Почему для этого нужен дифференциал? В любом повороте, путь колеса оси, двигающегося по короткому (внутреннему) радиусу, меньше, чем путь другого колеса той же оси, которое проходит по длинному (внешнему) радиусу. В результате этого, угловая скорость вращения внутреннего колёса должна быть меньше угловой скорости вращения внешнего колеса. В случае с не ведущим мостом, выполнить это условие достаточно просто, так как оба колеса могут не быть связанными друг с другом и вращаться независимо. Но если мост ведущий, то необходимо передавать крутящий момент одновременно на оба колеса (если передавать момент только на одно колесо, то возможность управления автомобилем по современным понятиям будет очень плохой).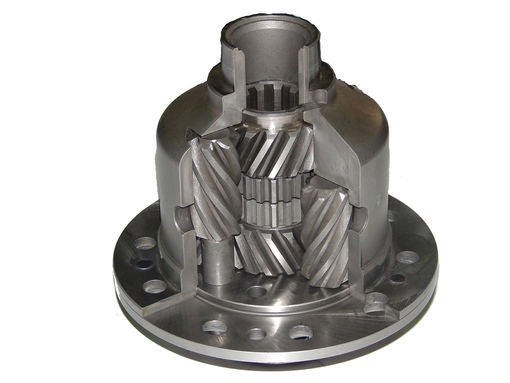
При жесткой же связи колёс ведущего моста и передачи момента на единую ось обоих колёс, автомобиль не мог бы нормально поворачивать, так как колеса, имея равную угловую скорость, стремились бы пройти один и тот же путь в повороте. Дифференциал позволяет решить эту проблему: он передаёт крутящий момент на раздельные оси обоих колёс (полуоси) через свой планетарный механизм с любым соотношением угловых скоростей вращения полуосей. В результате этого, автомобиль может нормально двигаться и управляться как на прямом пути, так и в повороте.
Однако, ввиду физики устройства, у планетарного механизма есть очень нехорошее свойство: он стремится передать полученный крутящий момент туда, куда легче. Например, если оба колеса моста имеют одинаковое сцепление с дорогой и усилие, необходимое для раскручивания каждого из колёс одинаковое, дифференциал будет распределять крутящий момент равномерно между колёсами. Но стоит только появится ощутимой разнице в сцеплении колёс с дорогой (например, одно колесо попало на лёд, а другое осталось на асфальте), как дифференциал тут же начнёт перераспределять момент на то колесо, усилие для раскрутки которого наименьшее (то есть на то, которое находится на льду).
В полноприводных автомобилях дифференциалом обычно оборудованы два моста, а зачастую дифференциал можно обнаружить еще и между мостами (межосевой дифференциал). Таким образом, мы получаем схему трансмиссии, в которой присутствуют целых три дифференциала: два мостовых и один межосевой. Последний необходим для постоянного движения с полным приводом и передачей момента на все четыре колеса. Ведь в повороте колёса рулевого моста (обычно переднего) имеют совсем другие угловые скорости, нежели чем колёса заднего моста. Межосевой дифференциал призван передавать крутящий момент от коробки передач к обоим ведущим мостам с разным соотношением угловых скоростей. Такая схема с тремя дифференциалами является одной из самых распространённых схем для постоянного полного привода (Full time 4WD).
Межосевой дифференциал призван передавать крутящий момент от коробки передач к обоим ведущим мостам с разным соотношением угловых скоростей. Такая схема с тремя дифференциалами является одной из самых распространённых схем для постоянного полного привода (Full time 4WD).
Возвращаясь к вышеописанному проблемному свойству планетарного механизма, интересно рассмотреть ситуацию, когда полноприводный автомобиль с межосевым дифференциалом одним из четырёх колёс попал на тот же лёд (или в скользкую яму). Что тогда произойдёт ? Дифференциал моста, колесо которого находится на льду, отдаст весь полученный крутящий момент на это колесо. Межосевой дифференциал, в свою очередь, тоже стремится передать крутящий момент туда, куда легче. Естественно, межосевому дифференциалу легче отдать момент на мост с прокручивающимся на льду колесом, нежели чем на мост, колёса которого имеют хорошее сцепление с дорогой и могут двигать автомобиль. В результате, весь крутящий момент от двигателя и коробки передач пойдёт на раскручивание единственного колеса, находящегося на льду. Остальные три колеса остановятся и не будут получать никакого крутящего момента от дифференциалов. Итог: из четырёх ведущих колёс осталось только одно, которое проскальзывает на льду — полноприводный автомобиль «застрял». Как же заставить дифференциалы передавать крутящий момент на колёса с более хорошим дорожным сцеплением? Для этого были разработаны различные способы частичной и полной, ручной и автоматической блокировки дифференциалов, которые будут рассмотрены ниже.
Остальные три колеса остановятся и не будут получать никакого крутящего момента от дифференциалов. Итог: из четырёх ведущих колёс осталось только одно, которое проскальзывает на льду — полноприводный автомобиль «застрял». Как же заставить дифференциалы передавать крутящий момент на колёса с более хорошим дорожным сцеплением? Для этого были разработаны различные способы частичной и полной, ручной и автоматической блокировки дифференциалов, которые будут рассмотрены ниже.
Основной целью блокировки дифференциала является передача необходимого крутящего момента обоим его потребителям (полуосям или карданам). Существуют принципиально разные методы решения данной задачи. В данном разделе мы рассмотрим способ частичной блокировки с помощью самоблокирующегося дифференциала. Другие способы частичной блокировки дифференциала можно посмотреть здесь, а с метод полной блокировки дифференциала можно ознакомится в разделе «Что такое принудительная блокировка?»
Самоблокирующийся червячный дифференциал типа «Квайф»
Автором этой конструкции является англичанин Rod Quaife. В данном случае, оси сателлитов параллельны полуосям. Сателлиты расположены в своеобразных карманах чашки дифференциала. При этом парные сателлиты имеют не прямозубое зацепление, а образуют между собой еще одну гипоидную пару, которая расклиниваясь, так же участвует в процессе блокировки.
В данном случае, оси сателлитов параллельны полуосям. Сателлиты расположены в своеобразных карманах чашки дифференциала. При этом парные сателлиты имеют не прямозубое зацепление, а образуют между собой еще одну гипоидную пару, которая расклиниваясь, так же участвует в процессе блокировки.
Принцип работы cамоблокирующегося дифференциала
На рисунке приведен эскиз самоблокирующегося дифференциала. Рассмотрим его элементы и принцип работы.
Когда одно из колес (например, правое) начинает отставать, связанная с ним полуосевая шестерня 4 вращается медленнее корпуса 1 и поворачивает входящий с ней в зацепление сателлит 5. Он передает движение связанному с ним сателлиту 5 из левого ряда, а тот, в свою очередь, на левую полуосевую шестерню 3. Так обеспечиваются разные угловые скорости колес в повороте. Благодаря разности крутящих моментов на колесах в винтовом зацеплении возникают осевые и радиальные силы, прижимающие полуосевые шестерни 3, 4 и сателлиты 5, 6 торцами к корпусу 1, 2.
— Мы производим и продаем Cамоблокирующиеся дифференциалы на следующие марки и модели автомобилей:
- GREAT WALL
- ISUZU
- MITSUBISHI
- TOYOTA
- LandCruiser 71, 76, 78, 79, 100, 105 Series, Lexus LX470
- LandCruiser Prado, 90, 120, 150 series, Lexus GX
- LandCruiser Prado 120, 150 series, Lexus GX
- Bundera, LendCruiser II, LJ70, RJ70
- HiLux Surf, Pickup, Hiace, 4Runner
- 4Runner, LN61, YN63
- T100, Tacoma, Tundra
- FJ Cruiser (US)
Дифференциал самоблокирующийся делает доступными новые дороги
С самого начала истории автомобиля перед его разработчиками стояла одна непростая задача – как обеспечить его равномерное движение в повороте или по неровной дороге. Дело в том, что при повороте автомобиля внутренние и внешние колеса движутся по окружности разного радиуса, проходят разный путь и обладают разной скоростью. Для устранения этого в конструкцию автомобиля было введено такое устройство, как дифференциал. Однако у него обнаружились свои недостатки, и вот их-то и должен был устранить дифференциал самоблокирующийся.
Дело в том, что при повороте автомобиля внутренние и внешние колеса движутся по окружности разного радиуса, проходят разный путь и обладают разной скоростью. Для устранения этого в конструкцию автомобиля было введено такое устройство, как дифференциал. Однако у него обнаружились свои недостатки, и вот их-то и должен был устранить дифференциал самоблокирующийся.
Однако, как всегда бывает в таких случаях, появилась новая проблема. Способность колес двигаться с разной скоростью обернулась другой крайностью. При попадании одного колеса на скользкое место (грязь, лед, накат) крутящий момент от двигателя весь поступает именно на это колесо, и оно начинает вращаться с увеличенной скоростью, тогда как другое колесо на этой оси остаётся неподвижным. Автомобиль будет буксовать, у него крутится только одно колесо, но из-за отсутствия сцепления с дорогой сдвинуть машину с места не может. Другое колесо при этом неподвижно. Вот для выхода из такой ситуации разработали дифференциал самоблокирующийся.
Автомобиль будет буксовать, у него крутится только одно колесо, но из-за отсутствия сцепления с дорогой сдвинуть машину с места не может. Другое колесо при этом неподвижно. Вот для выхода из такой ситуации разработали дифференциал самоблокирующийся.
Его отличительной особенностью является блокировка возможности колес, расположенных на одной оси, вращаться с различной скоростью. Практически это означает, что при включении блокировки скорость вращения колес одинакова, и если одно из них начинает пробуксовывать, то крутящий момент продолжает поступать на другое колесо, и автомобиль за счет этого может спокойно преодолеть трудный участок дороги. Подобная блокировка может выполняться разными способами – вручную или автоматически, что и реализует дифференциал самоблокирующийся.
Такая блокировка положительно сказывается на автомобиле, его проходимость
увеличивается на тяжелых и скользких дорогах, в грязи и снегу. Особенно это актуально для автомобилей, двигатель которых развивает небольшой крутящий момент. Так, установленный самоблокирующийся дифференциал на Ниву значительно повышает её проходимость. Конечно, если стоит нормальная «грязевая» резина. Установлен подобный дифференциал может быть на любую ось автомобиля, в том числе и на все разом. Правда, следует учесть, что при его установке на переднем мосту управляемость несколько ухудшается, и управлять автомобилем лучше опытному водителю.
Так, установленный самоблокирующийся дифференциал на Ниву значительно повышает её проходимость. Конечно, если стоит нормальная «грязевая» резина. Установлен подобный дифференциал может быть на любую ось автомобиля, в том числе и на все разом. Правда, следует учесть, что при его установке на переднем мосту управляемость несколько ухудшается, и управлять автомобилем лучше опытному водителю.Встраивают обычно такой дифференциал в конструкцию существующего, чаще всего заднего. Однако если двигатель способен развивать значительный крутящий момент, то возможно повреждение полуосей. Самоблокирующийся дифференциал УАЗ может вызвать именно такое повреждение. Это требует от водителя определенного мастерства в управлении автомобилем, но его применение дает ощутимые преимущества при движении по плохим дорогам. Большинство военных автомашин оснащено подобными устройствами.
Дифференциал самоблокирующийся дает прекрасную возможность повысить возможности автомобиля преодолевать сложные условиях движения, в то же время не требуя внесения в конструкцию машины серьезных конструктивных изменений, а также доступен по цене. Эффективность подобных устройств достаточно хорошо известна, недаром большинство армейских автомашин по умолчанию оснащается ими.
Эффективность подобных устройств достаточно хорошо известна, недаром большинство армейских автомашин по умолчанию оснащается ими.
виды, устройство и принцип работы
Блокировка дифференциала – это дополнительное конструктивное решение, позволяющее компенсировать его основные недостатки. Если на сухой ровной дороге дифференциал обеспечивает безопасное маневрирование и комфорт, то при выезде на пересеченную местность или во время движения по скользкому дорожному покрытию он может вообще лишить автомобиль возможности передвигаться. Чтобы этого не происходило, необходимо ограничить функциональность узла или полностью отключить его на некоторое время. Но методы блокировки дифференциала настолько разнообразны, что нужно рассмотреть основные из них по отдельности.
Главный недостаток дифференциала
Распределение крутящего момента дифференциаломДифференциал служит для распределения крутящего момента, поступающего от главной передачи, между полуосями ведущих колес. Крутящий момент постоянен, но соотношение его величины на ведущих колесах в определенных ситуациях должно быть различным.
Эта функция важна, когда автомобиль входит в поворот: внешнее колесо движется по большему радиусу и, соответственно, проходит за равный промежуток времени больший путь, чем внутреннее колесо. Чтобы «успеть» это сделать, угловая скорость внешнего колеса на время прохождения поворота должна повышаться.
Из-за смены направления движения центр тяжести автомобиля смещается в сторону поворота. В результате увеличивается сила сопротивления качению, и внутреннее колесо оказывается под большей нагрузкой, чем внешнее. Оно снижает скорость, дополнительно нагружая свою полуось.
На этом этапе в корпусе дифференциала из-за снижения угловой скорости более нагруженной полуоси внутреннего колеса начинают вращаться сателлиты. Они сообщают больший крутящий момент второй полуоси. Внешнее колесо повышает угловую скорость пропорционально тому, насколько ее снизило внутреннее колесо. Благодаря точному соотношению угловых скоростей машина проходит поворот плавно, без прыжков и пробуксовки.
Тот же принцип распределения крутящего момента действует в ситуации, когда одно из колес буксует в грязи, на льду или попадает на ухаб. Оно получает больший крутящий момент, ослабляя тяговую мощность колеса, находящегося в хорошем сцеплении с дорогой. Критическая ситуация может возникнуть при распределении в процентном соотношении 0% к 100%: автомобиль перестанет двигаться.
Оно получает больший крутящий момент, ослабляя тяговую мощность колеса, находящегося в хорошем сцеплении с дорогой. Критическая ситуация может возникнуть при распределении в процентном соотношении 0% к 100%: автомобиль перестанет двигаться.
Чтобы машина сдвинулась с места, необходимо перераспределить крутящий момент, сообщив большее его значение нагруженному колесу. При работающем дифференциале сделать это невозможно. Поэтому его частично или полностью блокируют.
Типы блокировки
Блокировать работу механизма можно методом прямого соединения его корпуса с нагруженной полуосью или ограничив возможность сателлитов вращаться.
Блокировка имеет следующие виды:
- Полная: величина передаваемого крутящего момента достигает 100 %. Детали узла соединяются жестко, лишая его возможности выполнять свои функции.
- Частичная: крутящий момент в определенном соотношении распределяется дифференциалом принудительно и за счет ограничения работы его составных частей.
В зависимости от степени участия водителя, блокировка дифференциала может производиться в ручном или автоматическом режиме:
- Принудительную блокировку выполняет водитель по мере необходимости (ручная блокировка).
 Для этого используют кулачковый дифференциал.
Для этого используют кулачковый дифференциал. - Самоблокирующийся дифференциал накладывает ограничения на работу автоматически (автоматическая блокировка). Необходимость блокировки и ее степень определяются разностью крутящих моментов на полуосях ведущих колес или их угловых скоростей. Некоторые разновидности таких систем используют датчик блокировки дифференциала.
 Для этого используют кулачковый дифференциал.
Для этого используют кулачковый дифференциал.Виды блокирующих устройств
Устройство блокировки узла зависит от его типа и применяемого механизма. Различный функционал накладывает ограничения и определяет возможность использования в межколесных или межосевых дифференциалах.
Кулачковое блокирующ
Самоблокирующийся дифференциал на автомобиле Formula Student
Иван Симионато 1013650 — [email protected] — инженер-механик Джузеппе Соттана 1012757 — [email protected] — Диплом в области машиностроенияВВЕДЕНИЕ
Рис.1: MG06 / 11 на мероприятии FSG 2011, Хоккенхаймринг, Германия
Целью этого проекта является моделирование преимуществ и недостатков применения самоблокирующегося дифференциала в системе трансмиссии студенческого автомобиля Формулы Падуи сезона 2011 года MG06 / 11.
Formula Student — это студенческое инженерное соревнование, в котором студенческие команды со всего мира проектируют, строят, тестируют и участвуют в гонках на небольшом гоночном автомобиле в стиле формулы. Автомобили оцениваются отраслевыми специалистами по ряду критериев в различных типологиях событий:
- Статические события: дизайн (150 баллов), анализ затрат (100 баллов), оценка презентации проекта бизнес-плана (75 баллов), технический осмотр и проверка безопасности, проверка наклона, проверка тормозов и проверка шума;
- динамических соревнований, а именно: занос (50 баллов), спринт на 1 км (150 баллов), ускорение на 75 м (75 баллов) и выносливость на 22 км (300 баллов) с относительной оценкой экономии топлива (100 баллов).
Цепи для динамических мероприятий узкие, извилистые и не такие быстрые, чтобы сохранить безопасность студентов. В этих ситуациях трансмиссия предназначена для оптимизации тяги автомобиля, чтобы как можно быстрее выходить из поворотов, а также для повышения управляемости и управляемости автомобиля, чтобы помочь водителю во время гонки.
ЗАДАЧИ
В этом анализе в трансмиссии использовался самоблокирующийся дифференциал с многодисковыми муфтами производства Drexler® Motorsport GmbH, который можно увидеть на рисунке ниже:
Рис.2: Дифференциал повышенного трения Drexler® Formula Student V2 2010
В этом анализе мы хотели сравнить характеристики, которые можно получить от самовидящегося дифференциала, с характеристиками, которые можно получить от обычного дифференциала.
В одном автомобиле использовались два разных решения с идентичной и реальной кинематографической конфигурацией подвески. Чтобы сравнить два разных решения, мы предоставили две разные трассы с двумя другими разными асфальтовыми покрытиями, чтобы создать разные условия сцепления.
Две дорожки:
- кривая с постоянным радиусом 10 м, чтобы подчеркнуть максимальное поперечное ускорение в условиях максимального крутящего момента, создаваемого двигателем;
- a прямо для оценки максимального продольного ускорения и моделирования реального динамического события в Формуле SAE, называемого «ускорением».

Два разных состояния асфальта:
- сухой, чтобы обеспечить максимальное сцепление между гусеницей и шинами, чтобы передать на землю весь крутящий момент, создаваемый двигателем;
- промерзание или замерзание, чтобы обеспечить минимальное сцепление между гусеницей и шиной и подчеркнуть максимальное отношение крутящего момента между двумя полуосями.
Необходимость Блокировка дифференциала
Конструкция обычных дифференциалов имеет два важных преимущества:
- ,
- , скорости вращения ведущих колес могут быть отрегулированы независимо друг от друга относительно друг друга в соответствии с разными расстояниями, пройденными левым и правым колесами и
- крутящий момент — это симметрично распределенный на оба ведущих колеса, без какого-либо момента рыскания.
Однако эти два преимущества компенсируются серьезным недостатком. Когда потенциал трения двух ведущих колес различен, движущие силы, передаваемые на поверхность дороги для обоих ведущих колес, зависят от меньшего потенциала трения двух ведущих колес. В данном случае это сравнение относится к внутренней компенсации колеса в ведущей оси. Это означает, например, что колесо, стоящее
Когда потенциал трения двух ведущих колес различен, движущие силы, передаваемые на поверхность дороги для обоих ведущих колес, зависят от меньшего потенциала трения двух ведущих колес. В данном случае это сравнение относится к внутренней компенсации колеса в ведущей оси. Это означает, например, что колесо, стоящее
- на льду (или мокром / маслянистом асфальте) будет вращаться, а другое колесо, стоящее на асфальте, не может передать больший крутящий момент, чем то, которое вращается.Поэтому автомобиль не может двинуться с места.
Чтобы преодолеть этот недостаток обычных дифференциальных передач, в критических условиях движения необходимо запретить компенсирующее действие. Это может быть выполнено:
- ,
- с использованием самоблокирующихся дифференциалов , также известных как дифференциалы повышенного трения или блокировки. Это дифференциалы с преднамеренно жестким и ограниченным компенсирующим действием. Это позволяет им передавать крутящий момент на одно колесо, даже когда другое колесо вращается из-за плохого сцепления с дорогой. Это означает потерю преимущества передачи мощности без рыскания. Свободная адаптация обеих скоростей колес к разным расстояниям, пройденным двумя гусеницами, ограничена. Полуоси подвергаются большему напряжению из-за перераспределения крутящего момента. Блокирующие дифференциалы делятся на регулируемые по нагрузке или крутящему моменту и регулируемые по скорости или скольжению.
 Это означает потерю преимущества передачи мощности без рыскания. Свободная адаптация обеих скоростей колес к разным расстояниям, пройденным двумя гусеницами, ограничена. Полуоси подвергаются большему напряжению из-за перераспределения крутящего момента. Блокирующие дифференциалы делятся на регулируемые по нагрузке или крутящему моменту и регулируемые по скорости или скольжению.
Это означает потерю преимущества передачи мощности без рыскания. Свободная адаптация обеих скоростей колес к разным расстояниям, пройденным двумя гусеницами, ограничена. Полуоси подвергаются большему напряжению из-за перераспределения крутящего момента. Блокирующие дифференциалы делятся на регулируемые по нагрузке или крутящему моменту и регулируемые по скорости или скольжению.В частности, коммерческие решения включают:
- Самоблокирующиеся дифференциалы, зависящие от нагрузки, с многодисковой муфтой,
- зависимые от нагрузки самоблокирующиеся дифференциалы с червячной передачей (Torsen®),
- Самоблокирующиеся дифференциалы с гидравлической муфтой, зависимые от скольжения,
- дифференциалы с электронным (автоматическим) блокировкой и многодисковыми муфтами под давлением,
- кулачковые самоблокирующиеся дифференциалы.
В данном анализе в трансмиссии используется самоблокирующийся дифференциал с многодисковыми муфтами производства Drexler® Motorsport GmbH. Мы видим его в разобранном виде, на котором мы можем видеть шестерни и сцепления.
Мы видим его в разобранном виде, на котором мы можем видеть шестерни и сцепления.
Рис.3: Блокировка дифференциала с помощью многодисковых муфт с предварительным натягом, Lok-O-Matic. Верхняя полусекция: дифференциал без предварительного натяга.Нижняя полусекция: дифференциал с предварительным натягом (автомобильная трансмиссия — Naunheimer, Bertsche, Ryborz, Novak)
Эффект блокировки самоблокирующегося дифференциала с многодисковой муфтой основан на зависящем от крутящего момента внутреннем трении, создаваемом двумя многодисковыми муфтами, симметрично установленными в кожухе дифференциала. Самоблокирующееся действие является результатом комбинации зависимости нагрузки и нагрузки пружины многодисковых муфт. Эффект блокировки в зависимости от нагрузки (Рис. 3, вверху) зависит от входного крутящего момента T 1, приложенного к клетке дифференциала [ 1 ] , передаваемого через вал дифференциала [ 2 ] на два нажимные кольца [ 3 ] в клетке дифференциала [ 1 ] , которые заблокированы на кручение, но скользят в осевом направлении. Под нагрузкой блокирующие усилия автоматически возникают на поверхностях призматических выемок [ 8 ] в прижимных кольцах (см. Деталь на рис. 3), сжимая диски сцепления вместе. Наружные пластины [ 4 ] скручены с клеткой дифференциала [ 1 ], а внутренние пластины [ 5 ] скручены с коническими шестернями оси [ 6 ].
Под нагрузкой блокирующие усилия автоматически возникают на поверхностях призматических выемок [ 8 ] в прижимных кольцах (см. Деталь на рис. 3), сжимая диски сцепления вместе. Наружные пластины [ 4 ] скручены с клеткой дифференциала [ 1 ], а внутренние пластины [ 5 ] скручены с коническими шестернями оси [ 6 ].
Таким образом, фрикционный контакт между пластинами противодействует разным скоростям приводного вала (например, при вращении колеса) с точно определенной силой.Этот эффект увеличивается с увеличением входного крутящего момента. Поскольку силы блокировки пропорциональны передаваемому крутящему моменту, эффект блокировки адаптируется к изменяющемуся крутящему моменту двигателя и увеличению крутящего момента на различных передачах, но величина блокировки — нет.
Пластинчатые пружины [ 7 ], которые могут быть установлены для предварительного натяжения многодисковой муфты, создают постоянный начальный эффект блокировки, который не зависит от передаваемого крутящего момента, но иногда издает заметный скрип. Это делает систему способной к блокировке даже на крайне неблагоприятных поверхностях, например, одно колесо на льду.Тем не менее, недостатком является то, что дифференциал этого типа всегда имеет основной момент блокировки. Это может быть нежелательно при парковке и на поворотах без пробуксовки.
Это делает систему способной к блокировке даже на крайне неблагоприятных поверхностях, например, одно колесо на льду.Тем не менее, недостатком является то, что дифференциал этого типа всегда имеет основной момент блокировки. Это может быть нежелательно при парковке и на поворотах без пробуксовки.
В модели, принятой для анализа поведения автомобиля, отсутствует тарельчатая пружина [ 7 ], потому что колея более узкая, извилистая и не такая быстрая. Наличие постоянного эффекта блокировки (который не зависит от передаваемого крутящего момента) придает автомобилю чрезмерную управляемость (нет оптимальных условий).По этой причине пластинчатая пружина была исключена и заменена простой металлической шайбой, которая имеет ту же толщину, что и нагруженная пластинчатая пружина.
Еще один недостаток, который следует иметь в виду, заключается в том, что во время процесса самоблокировки или компенсации геометрия зубьев конических зубчатых колес изменяется отрицательно, потому что фрикционные муфты, которые должны применяться, не должны иметь зазора.
МОДЕЛИРОВАНИЕ
МОДЕЛИРОВАНИЕ ДИФФЕРЕНЦИАЛА
Рис.4: Деталировка дифференциала
У нас уже были файлы CAD и массовые характеристики всех деталей дифференциала, предоставленные непосредственно производителем.
Сборка в основном соответствует осевому расположению, поэтому было довольно просто расположить все трения и шестерни вдоль корпуса дифференциала, используя в основном шарнирные соединения с желаемой степенью свободы, отключенной в шарнире. На внешнем трении мы также заблокировали вращение относительно корпуса дифференциала, чтобы обеспечить твердое вращение этих частей, и разблокировать это вращение за счет внутреннего трения, чтобы они могли вращаться свободно.Та же стратегия была использована для соединения вращения боковых конических шестерен с внутренним трением, оставляя свободным осевое движение
Рис.5: С-образная структура, используемая для соединения шестерен
У нас есть 2 боковые конические шестерни и 4 конические шестерни. На модели мы использовали только 1 коническую шестерню, потому что на реальном дифференциале их 4, просто из соображений симметрии и распределения нагрузки, а не из кинематографических соображений, что является предметом этого исследования. Зубчатое соединение работает только с шестернями, которые оси вращения закреплены на той же наземной части.Поэтому мы создали «вымышленную» невесомую деталь в форме буквы «С», чтобы соединить три шестерни.
На модели мы использовали только 1 коническую шестерню, потому что на реальном дифференциале их 4, просто из соображений симметрии и распределения нагрузки, а не из кинематографических соображений, что является предметом этого исследования. Зубчатое соединение работает только с шестернями, которые оси вращения закреплены на той же наземной части.Поэтому мы создали «вымышленную» невесомую деталь в форме буквы «С», чтобы соединить три шестерни.
Еще одна проблема заключалась в поведении трения:
Рис.6: фрикционный контактный элемент
Во-первых, мы использовали одну пару трения с каждой стороны вместо четырех контактных поверхностей с каждой стороны, как в реальной системе. Что касается шестерен, то целесообразно распределить усилия и обеспечить достаточное соотношение крутящего момента и осевого усилия. Мы могли создать такую же ситуацию, только установив соответствующий коэффициент трения.
- Мы пытались использовать контакт CAD, но форма трения была слишком сложной для правильного построения сетки, а LMS не давала возможности установить многие параметры.
- «Фрикционный» элемент работал только как рассеивание энергии на вращающемся шарнире, поэтому мы не могли заставить его зависеть от осевой силы.
- Решение заключалось в создании двух сфер с одним трением и плоскости с другой, а затем контактного элемента между сферами и плоскостью. Мы использовали контакт Герца и установили модуль Юнга (206 ГПа) и коэффициент Пуассона (0,3), чтобы обеспечить небольшую деформацию сфер.

Оптимальный коэффициент трения для представления реального дифференциала оказался равным 0,8. Мы провели несколько тестов блокировки, чтобы увидеть максимальный процент блокировки. Очевидно, в сравнительных тестах с открытым дифференциалом мы установили этот параметр на 0, чтобы избежать блокировки.
Рис.7: контактный элемент рампы / оси
Такой же контакт использовался для контакта между осью солнечной батареи и рампы дифференциала.
На край оси поместили сферу, а на поверхности пандуса создали плоскость.
Мы использовали контакт Герца и установили модуль Юнга (206 ГПа) и коэффициент Пуассона (0,3) стали, как это есть на самом деле. Мы реализовали как ускорение, так и тормозные рампы для обеих сторон дифференциала.
Мы реализовали как ускорение, так и тормозные рампы для обеих сторон дифференциала.
Пластинчатые пружины могут предварительно нагружать многодисковое сцепление и создавать постоянный начальный эффект блокировки, который не зависит от передаваемого крутящего момента. В данной модели дифференциала пластинчатая пружина заменена на простую шайбу с такой же осевой толщиной пластинчатых пружин в нормальном состоянии работы в сепараторе дифференциала и с такими же массовыми характеристиками пластинчатой пружины.
МОДЕЛИРОВАНИЕ АВТОМОБИЛЯ
Рис.8: Модель автомобиля
После определения дифференциала мы надеваем его на MG06 / 11, соединяя его с поворотным шарниром, к которому прилагается крутящий момент шестерни. У нас еще был CAD рамы, корпуса и стоек. Затем мы могли бы создать точки, в которых подвешивается подвеска, имея координаты, заданные программой оптимизации «Lotus».
Рис.9: Деталь модели подвески
Затем мы создали простые одномерные элементы для треугольников, рулевых тяг и тяг подвески. Затем мы поместили элементы TSDA там, где расположены настоящая пружина и демпфер. Для пружины мы использовали реальные значения базовой настройки автомобиля спереди и более жесткую подвеску сзади, чтобы подчеркнуть передачу нагрузки по задней оси, чтобы дифференциал работал более заметно.
Затем мы поместили элементы TSDA там, где расположены настоящая пружина и демпфер. Для пружины мы использовали реальные значения базовой настройки автомобиля спереди и более жесткую подвеску сзади, чтобы подчеркнуть передачу нагрузки по задней оси, чтобы дифференциал работал более заметно.
| Муравей | пост | |
| Свободная длина [мм] | 200 | 245 |
| Пружина [Н / м] | 40000 | 100000 |
| Демпфирование [кг / с] | 100000 | 100000 |
Для шин использовалась простая модель шины с параметрами в диапазоне, рекомендованном в онлайн-справке LMS. Единственным параметром, который мы могли проверить, был коэффициент трения 1,2, указанный производителем как максимальное значение в оптимальных температурных условиях.
Единственным параметром, который мы могли проверить, был коэффициент трения 1,2, указанный производителем как максимальное значение в оптимальных температурных условиях.
| Радиус [мм] | 255 | |
| Константа демпфирования [кг / с] | 3000 | |
| Сопротивление качению | 0,05 | |
| Коэффициент трения | 1.-2 рад-1] | 10000 |
| Вертикальная жесткость [Н / м] | 300000 |
Геометрия рулевого управления также была реальной (с учетом угла Аккермана) и контролировалась с помощью управляющего входа траектории и выходного управляющего сигнала, действующего с силой на рулевую тягу.
Другие части автомобиля (тормозная система, двигатель, выхлопная система, водитель и т. Д.) Не были реализованы, потому что они не требуются в этом анализе.
Мы создаем массу, равную весу автомобиля, и размещаем ее там, где находится центр масс автомобиля.
МОДЕЛИРОВАНИЕ И РЕЗУЛЬТАТЫ
ИСПЫТАНИЕ НА ПРЯМОЙ
Во-первых, мы решили провести несколько тестов на прямой, чтобы проверить дифференциальную модель.
Мы создали простой прямой путь и использовали управляющий вход для следящего за траекторией, чтобы поддерживать транспортное средство на дороге, используя следующие параметры для управляющего входа:
| Параметр | Значение |
| Прирост позиции | 4 |
| Прирост скорости | 400 |
| Расстояние просмотра [мм] | 3500 |
Мы использовали этот элемент управления для создания силы привода на рулевой штанге с выходом управления шарниром.
Испытание заключалось в периоде оценки в 1 секунду, позволяющем автомобилю занять нейтральное положение, и в применении кривой крутящего момента к дифференциалу в течение 6 секунд моделирования.
3 Были проведены различные испытания:
- P1: С БЛОКИРОВКОЙ, ПОЛНАЯ ЗАХВАТА
Первый тест проводился с шинами на полном сцеплении. Автомобиль разгоняется с максимальной скоростью, не теряя сцепления, шины передают на землю весь крутящий момент, поступающий от дифференциала, в равных частях.
P1 Youtube видео
- P2: С БЛОКИРОВКОЙ, ЛЕВЫЕ ШИНЫ БЕЗ ЗАХВАТА
Второй тест проводился с учетом сцепления только с правыми шинами и таким образом имитировал ситуацию, когда левые шины находятся на льду, чтобы подчеркнуть работу дифференциала.
Коэффициент трения дифференциала был установлен на 0,8, значение, которое мы получили после некоторых испытаний, подтверждающих предписанный производителем процент блокировки для нашей конфигурации дифференциала.
Автомобиль изо всех сил пытается двигаться, но даже если левая шина не сцепляется, блокировка дифференциала позволяет крутящему моменту достигать шины с захватом, заставляя автомобиль ускоряться.
P2 Youtube видео
- P3: БЕЗ БЛОКИРОВКИ, ЛЕВЫЕ ШИНЫ БЕЗ ЗАХВАТА
Давая нулевой коэффициент трения дифференциальному трению, мы заставили дифференциал работать как «открытый».
Очевидно, что дифференциал не может передать крутящий момент на землю.Большая часть крутящего момента ускоряет колесо без сцепления, и только очень слабый процент достигает колеса с сцеплением.
Автомобиль преодолевает меньшее расстояние, чем с эффектом автоблокировки, и имеет меньшее ускорение.
P3 Youtube видео
График 1: Импульс, передаваемый полуосями
Кривая крутящего момента (желтая линия) одинакова для трех испытаний.
При «открытом» дифференциале крутящий момент на правое и левое колесо практически одинаков. С самоблокирующимся дифференциалом большая часть крутящего момента поступает на колесо с хорошим сцеплением, что определяет лучшее ускорение.
С самоблокирующимся дифференциалом большая часть крутящего момента поступает на колесо с хорошим сцеплением, что определяет лучшее ускорение.
График 2: Нормальная сила на фрикционных дисках
Нормальная сила на фрикционных дисках зависит только от приложенного крутящего момента, а не от процента блокировки. Фактически, то же самое с «открытой» и самоблокирующейся конфигурациями.
График 3: Скорость вращения задних колес
При полном захвате (P1) колеса вращаются с одинаковой скоростью, потому что они получают одинаковый крутящий момент.
В P2 левое колесо (без сцепления) вращается, а правое (с хорошим сцеплением) ускоряет машину.
В P3 левое колесо вращается намного более равномерно, забирая крутящий момент с правого колеса, что фактически медленнее, чем в P2, и, таким образом, ухудшает ускорение автомобиля.
График 4: Реальное пробуксовка колес
Пробуксовка определяется как разница между скоростью ведущего и заднего колеса, деленная на скорость ведущего колеса. Это соотношение указывает на числовое значение скорости дифференциала и задних колес. При полном сцеплении (P1) проскальзывание отсутствует, при плохом сцеплении на левых шинах наблюдается проскальзывание, уменьшающееся при блокировке (P2) и постоянное при «открытом» дифференциале (P3).
Это соотношение указывает на числовое значение скорости дифференциала и задних колес. При полном сцеплении (P1) проскальзывание отсутствует, при плохом сцеплении на левых шинах наблюдается проскальзывание, уменьшающееся при блокировке (P2) и постоянное при «открытом» дифференциале (P3).
График 5: Расстояние, пройденное автомобилем
Анализируя P2 и P3, можно увидеть, как с самоблокирующимся дифференциалом автомобиль проезжает большее расстояние из-за лучшего ускорения.
Конечно, в P1 (с большим сцеплением) машина проезжает еще большее расстояние.
График 6: Скорость автомобиля
С самоблокирующимся дифференциалом автомобиль достигает более высоких скоростей за то же время (6 с), что и моделирование
ИСПЫТАНИЕ ПО КРИВОЙ С ПОСТОЯННЫМ РАДИУСОМ
Во второй раз мы решили провести несколько тестов на трассе с кривой, состоящей из 3-х прямых. 5 м, кривая с постоянным радиусом 10 м и углом 90 ° и, наконец, прямая 5 м.
5 м, кривая с постоянным радиусом 10 м и углом 90 ° и, наконец, прямая 5 м.
На этот раз мы использовали следующие параметры для управляющего входа:
| Параметр | Значение |
| Прирост позиции | 20 |
| Прирост скорости | 400 |
| Расстояние просмотра [мм] | 3500 |
«Управляющий вход следящего за траекторией» генерирует усилие привода на рулевой штанге с выходом совместного управления, который дает автомобилю возможность следовать по средней линии траектории.
Как и в случае с прямой, испытание заключалось в периоде оценки в 1 секунду, чтобы позволить транспортному средству занять нейтральное положение. Тест закончился на 5,7 с.
Мы применили кривую крутящего момента к корпусу дифференциала с максимальным значением 420 Нм.
- P4: С БЛОКИРОВКОЙ, ПОЛНАЯ ЗАХВАТА
Первое испытание было проведено с шинами при полном сцеплении с дорогой и, как видно из прямого испытания, коэффициент трения дифференциала трения был установлен на 0,8.Автомобиль разгоняется с максимальной скоростью, не теряя осевой линии пути, но шины не могут передать на землю весь крутящий момент, поступающий от дифференциала, в равных частях. На графике крутящего момента можно увидеть, что максимальное соотношение крутящего момента между внутренними и внешними задними колесами составляет около 60%. Это подтверждает реальное значение коэффициента крутящего момента, указанное производителем дифференциала, как и ожидалось.
P4 Youtube видео
График 7: Кривая крутящего момента и количества движения, передаваемых полуосями
Кривая крутящего момента (синяя линия) одинакова для двух тестов.
В P5 крутящий момент, действующий на два полуоси, получается идентичным из-за «открытого» дифференциала. Однако в P4 крутящий момент получается другим из-за самоблокирующегося дифференциала. Как видно на прямом тесте, большая часть крутящего момента приходится на колесо с хорошим сцеплением. Можно увидеть, что максимальное соотношение крутящего момента между внутренними и внешними задними колесами составляет около 60% от максимума, как и ожидалось.
График 8: Нормальное усилие на фрикционные пластины
График показывает наличие высокого градиента силы, когда крутящий момент быстро увеличивается и когда крутящий момент медленно уменьшается (из-за угла в 50 ° на рампе при замедлении).Как и на прямой, графики сначала идентичны, а затем различаются из-за разного поведения машины на выходе из поворота.
График 9: Скорость вращения задних колес
В P5 угловая скорость заднего левого колеса (внутреннего колеса) очень высока из-за потери сцепления и большого крутящего момента, поступающего от дифференциала. В P4 угловая скорость задних колес более схожа из-за эффекта блокировки.
График 10: Реальное пробуксовка колес
Пробуксовка определяется как разница между скоростью ведущего и заднего колеса, деленная на скорость ведущего колеса. Это соотношение указывает на числовое значение скорости дифференциала и задних колес.
Большие пробуксовки достигаются при «открытой» конфигурации дифференциала (P5).
График 11: Импульс рыскания
Непосредственным следствием блокировки дифференциала является увеличение момента рыскания из-за разницы продольных сил задних колес.
Автомобиль имеет избыточную поворачиваемость, требующую от водителя больших навыков вождения, но определяющую лучшие характеристики.
График 12: Плечо эквивалентной силы тяги
Плечо эквивалентной силы тяги получается при уменьшении импульса рыскания на сумму сил тяги на задних колесах. Положительно, если сила находится справа от центра тяжести автомобиля, так что импульс дает положительный результат.
Чем больше рука, тем больше инерция рыскания.
График 13: Расстояние, пройденное автомобилем
С самоблокирующимся дифференциалом максимальное пройденное расстояние составляет 20,3 м, а с «открытым» дифференциалом — всего 19,5 м за то же время моделирования.
График 14: Скорость автомобиля
Скорость автомобиля точно такая же во время прямого и углового въезда, но при подаче мощности на вершине поворота самоблокирующийся дифференциал обеспечивает лучшее сцепление и позволяет лучше ускоряться на выходе из поворота.
Скорость в и симуляции составляет 10,6 м / с с блокировкой и только 9,6 м / с с «открытым» дифференциалом »
Преимущества самоблокирующегося дифференциала с точки зрения максимальной скорости и максимального пройденного расстояния идут в ущерб устойчивости и управляемости автомобиля, что приводит к избыточной поворачиваемости (вместо недостаточной поворачиваемости) с большим усилием и концентрацией, требующимися от водитель.
ВЫВОДЫ
Испытания на прямой позволили проверить поведение модели дифференциала LMS, в частности, максимально достижимый процент блокировки. После установки правильного коэффициента трения для фрикционных дисков мы увидели, что для разных крутящих моментов двигателя процент блокировки всегда составлял около 60%, как предписано производителем для рампы, которую мы использовали в моделировании (наклон 40 °).
Испытание с левыми шинами без сцепления (как на льду) показало различное поведение между открытым дифференциалом, когда автомобиль изо всех сил пытается двигаться вперед и передает большую часть крутящего момента на колесо с плохим сцеплением, и самоблокирующимся дифференциалом с автомобилем. меньше трудностей при движении, потому что 60% крутящего момента передается на колесо с хорошим сцеплением.
Второй тест с автомобилем в реальных гоночных условиях (угол 90 ° при полном разгоне) показал потенциал дифференциала на гоночной трассе.
Выполнение поворота с той же кривой крутящего момента, исходящей от двигателя, дало лучшие результаты с самоблокирующимся дифференциалом. Автомобиль преодолел большее расстояние за то же время (20,4 м против 19,6 м), а также вышел из поворота с большей скоростью (38,22 км / ч против 34,74 км / ч).
Преимущества подчеркиваются выбранными нами параметрами (радиус поворота, кривая крутящего момента двигателя, сцепление шины с дорогой), но даже если это преимущество может быть меньше, мы должны учитывать, что на круге, сделанном примерно из 10-15 поворотов, преимущество будет последовательным и наверняка может иметь значение.
Очевидно, что дифференциал должен быть правильно настроен с правильной рампой дифференциала (также по отношению к трассе), чтобы избежать проблем с управляемостью или плохой маневренности в очень крутых поворотах. Плохая настройка может привести к худшим характеристикам по сравнению с открытым дифференциалом, но это не было нашей целью.
В этой работе мы подтвердили правильность работы реализованной нами дифференциальной модели, а затем мы привели несколько примеров рабочих условий, в которых она продемонстрировала свою работу, как ожидалось, а также лучшую, чем обычный открытый дифференциал, при правильной настройке.
🎓 самоблокирующийся дифференциал ⚗ с английского 🧬
Посмотреть другие словари:
— Infobox Название автомобиля = VW тип 82 Производитель Kübelwagen = головная компания Volkswagen = aka = Производство автомобилей с ковшом / баком = 50 435 (1940 1945) сборка = KDF Stadt (= Wolfsburg) предшественник = VW тип 62 преемник = VW тип 181 Класс вещи =…… Википедия
Mercedes-Benz W123 — Производитель Daimler Benz Производство 1976–1986 гг. 2 696 915 штук [1] 4 двери: 2 397 514 Купе: 99 884… Википедия
Land Rover Discovery — Производитель Land Rover Производство 1989 г. по настоящее время Сборка… Википедия
Chevrolet C / K — Производитель General Motors Также называется GMC C / K GMC Sierra Производство 1960–2000 США 1965–2000 Канада 1964–2001 Br… Wikipedia
Lancia Delta — См. Также: Lancia Delta S4 Lancia Delta Lancia Delta (3-е поколение) Производитель Lancia Производство… Википедия
Барабанный тормоз — Барабанный тормоз со снятым барабаном, используемый на заднем колесе легкового или грузового автомобиля.Обратите внимание, что в этой установке для стояночного тормоза с тросовым приводом используются рабочие башмаки… Wikipedia
Червячная передача — Червячная передача — это зубчатая передача, в которой червяк (который представляет собой шестерню в форме винта) входит в зацепление с червячной шестерней (которая по внешнему виду похожа на прямозубую шестерню и также называется червячное колесо). Терминологию часто путают с неточной…… Википедия
Fiat Panda — Производитель Fiat Производство 1980 – настоящее время Предшественник Fiat 133 Fiat Seicento… Википедия
Дисковый тормоз — Крупный план дискового тормоза на автомобиле На автомобилях дисковые тормоза часто располагаются с… Wikipedia
4Matic — это полноприводная система полного привода, разработанная и используемая Mercedes Benz.Он хорош для езды по скользкой местности. Почти все их автомобили с этой системой также имеют в стандартной комплектации автоматическую коробку передач (кроме…… Wikipedia
Автомобиль — Информацию о журнале см. В Автомобильном журнале. Автомобиль и Машины перенаправляются сюда. Для использования в других целях, см Автомобиль (значения). Автомобиль… Википедия
LOKKA | Высшее инженерное дело
LOKKA — это автоматический дифференциал с принудительной блокировкой, новая концепция в технологии блокировки дифференциала, которая обеспечивает доступное тяговое усилие и при этом обеспечивает работу дифференциала.
Неважно, движется ли LOKKA по битуму или бездорожью по глубокой грязи, мягкому песку или поднимается по крутым каменистым склонам, LOKKA работает плавно, тихо и надежно.
LOKKA Локеры используются во всех типах коммерческих и развлекательных полноприводных автомобилей в самых тяжелых условиях полноприводных автомобилей.
Революционный дизайн LOKKA чрезвычайно прочен … но гениально прост. Планетарные шестерни в существующем корпусе дифференциала просто заменяются парой LOKKA кулачковых и осевых шестерен.
| Характеристики | |
| Плавный автоматический режим | Чрезвычайно чувствительная разблокировка (касание пальцем) |
| Доступен широкий выбор моделей | Один из самых доступных шкафчиков в мире |
| Бескомпромиссное рулевое управление на дороге и бездорожье | Надежные рабочие характеристики |
| Надежная блокировка для 100% тяги | Непревзойденная надежность благодаря простой конструкции |
| Удваивает внедорожные возможности вашего 4WD | Сверхэластичные стальные сплавы для долговечности |
| 3 года, безусловная гарантия * | Простая установка — Самостоятельная установка (большинство моделей) |
LOKKA в большинстве случаев может быть полностью установлен любым, кто способен выполнить простую механическую работу в течение от одного до четырех часов.В этих случаях не требуется специальной настройки, так как ведущая шестерня и ведущая шестерня не высаживаются.
Никаких специальных инструментов, калибровочного оборудования или дорогостоящих специалистов по дифференциалам не требуется, только инструкция по установке и базовый набор инструментов.
Разработанный для безотказной работы и изготовленный в соответствии со строгими спецификациями из высокопрочных, термообработанных сплавов для максимальной прочности, LOKKA — отличный выбор для водителей полноприводных автомобилей, которым требуется максимальное тяговое усилие и долговечность.
Ключ к плавной работе LOKKA — это функция чрезвычайно низкопрофильных зубчатых передач « cam & axle », действующих вместе с передовым механическим принципом, который вызывает динамическое зацепление и расцепление осей.Вдобавок конструкция LOKKA позволяет блокировать его почти мгновенно, что означает, что блокировка и повторная блокировка происходят быстро и без резких действий.
Функционирование и эффективность LOKKA по сравнению с другими дифференциалами кратко описаны ниже.
Открытые дифференциалы и дифференциалы повышенного трения (LSD)предназначены для пропорционального распределения крутящего момента между колесами, что позволяет колесам двигаться с разной скоростью вращения при прохождении поворотов по твердой дороге или по очень неровной поверхности.
При повороте на твердой поверхности дифференциалы «open» и LSD используют внешнее колесо для управления автомобилем, в то время как внутреннее колесо может «дифференцироваться» или проходить более короткое расстояние вокруг поворота. Однако сама природа их конструкции отрицательно сказывается на их способности передавать равный крутящий момент на оба колеса, поэтому тяговое усилие и способность полного привода на бездорожье серьезно ограничены.
LOKKA будет работать так же, как открытый дифференциал и дифференциал LSD, когда автомобиль движется в условиях равного сцепления, то есть на дороге. LOKKA позволяет колесам «дифференцироваться» при повороте, но меняет порядок действий, поскольку он передает крутящий момент двигателя (следовательно, привод) на внутреннее колесо, а не на внешнее.
Пробуксовка колес или потеря тяги может произойти по многим причинам на бездорожье, включая: избыточный газ, высокая скорость приближения, ограниченный ход колес и преодоление препятствий, превышающих ход подвески (особенно автомобили с независимой передней подвеской), перенос веса с ведущих колес и скользких поверхностей, таких как грязь, песок, снег, сланец, мокрая трава и т. д.
В этих условиях и нормальный, и даже LSD дифференциал позволяют колесам с наименьшим сопротивлением пробуксовке. Таким образом, колеса с тяговым усилием не получают реального привода, и транспортное средство теряет скорость или останавливается. LSD помогут в этих обстоятельствах, но только в том случае, если они находятся в хорошем состоянии, и только при наличии достаточного сопротивления на вращающихся колесах для активации пакета сцепления и обеспечения возможности движения колес с тягой. Вопреки распространенному мнению, даже новый LSD позволит поднятому колесу свободно вращаться без привода колеса с тягой.
LOKKA приводит в движение оба колеса, за исключением случаев, когда автомобиль поворачивается на твердой поверхности, так что независимо от подвески, трансмиссии или типа двигателя все колеса управляются одинаково, поэтому тяговое усилие автомобиля (или внедорожные характеристики полного привода) значительно улучшается.
LOKKA устраняет чрезмерный износ шин и повреждение трансмиссии, характерное для других типов фиксаторов, и предотвращает «раскручивание» одного колеса и, как следствие, возможный перекос оси. Скорость приближения может быть снижена, что позволяет более контролируемо управлять полным приводом, что снижает износ автомобиля.Гусеницы не ухудшаются из-за пробуксовки колес или повторных попыток преодоления трудного препятствия, торможение двигателем улучшается, а надежность полного привода значительно повышается за счет повышенной способности 4WD безопасно преодолевать сложные препятствия.
Благодаря своему чувствительному механизму, LOKKA работает плавно и бесшумно. Это приводит к одному из наиболее важных преимуществ LOKKA — его способность обеспечивать плавное действие дифференциала с почти бескомпромиссным рулевым управлением означает, что автомобилем можно управлять, чтобы получить максимальное преимущество, в отличие от других рундуков, которые ограничивают путь полноприводного автомобиля почти прямым или может вывести автомобиль из строя и сделать рулевое управление физически трудным, если не невозможным.
Наиболее важной особенностью работы strong> LOKKA является степень плавности и чувствительности, с которой выполняется запирание и отпирание. LOKKA не страдает от резкого шума и подергивания автомобиля. Это достигается за счет использования низкопрофильных зубьев, которые имеют небольшой положительный шаг и позволяют плавно, неограниченно разблокировать устройство, что важно, практически отсутствует люфт между осью и кулачковыми шестернями. Эти зубцы используются как для запирания, так и для отпирания и упростили конструкцию за счет уменьшения количества деталей.
В отличие от других шкафчиков, которые блокируются для передачи нагрузки, но имеют побочный эффект, заключающийся в том, что разблокировка затруднена, что приводит к жестким характеристикам и эффектам блокировки и разблокировки.
Как это работает
По сравнению с другими шкафчиками LOKKA использует удивительно простой метод блокировки осей для максимального тягового усилия и разблокировки их для полного действия дифференциала. т.е. по мере необходимости при поворотах или движении по твердой поверхности.
Фактический принцип его работы, который легко продемонстрировать, трудно объяснить в письменной форме, но он заключается в следующем.
1. LOKKA состоит всего из 4 основных частей — пары кулачковых и осевых (боковых) шестерен на каждую ось, есть несколько пружин и штифтов, некоторые имеют проставки.
2. LOKKA обычно находится в полностью заблокированном состоянии и допускает дифференциальное действие только путем разблокировки устройства, когда приводимая от земли сила, действующая на колесо (либо во время поворота, либо при преодолении препятствий), заставляет это колесо вращаться быстрее, чем другое ведомое. рулевое колесо.
то есть колеса поворачивающегося транспортного средства фактически проходят два разных пути, при этом внутреннее колесо вращается по одному кругу, а внешнее колесо движется по большему кругу и, следовательно, быстрее.3. LOKKA использует два совершенно разных набора противодействующих сил, которые существуют из-за его конструкции: один для динамического соединения шестерен при приложении крутящего момента двигателя, а другой для разъединения шестерен при проскоке одного колеса.
3а. Сила блокировки создается за счет действия поперечного вала шестерни, действующего на кулачок уникальной конструкции и формы — чем больше крутящий момент прилагается, тем сильнее блокируется блок.
3б.Действие разблокировки происходит из-за эффекта наклона между низкопрофильными наклонными зубьями, которые отталкивают кулачок от оси (боковая шестерня), например, когда внешнее колесо вращается быстрее, чем внутреннее колесо при повороте. Питание продолжает подаваться на внутреннюю ось. Когда поворот завершается и колеса снова вращаются с той же скоростью, внешний фиксатор снова включается.
4. Следует понимать, что только когда к колесу прилагается внешняя сила, заставляющая его вращаться быстрее, чем остальная часть трансмиссии, LOKKA позволяет дифференцировать одно колесо.На скользких поверхностях, где одно колесо обычно нарушает сцепление с открытым дифференциалом, LOKKA остается заблокированным — даже если одно или оба колеса находятся в воздухе, LOKKA останется заблокированным.
Плюсы
- LOKKA — это точный механический шкафчик, обеспечивающий 100% тягу.
- Дизайн гениально простой, но чрезвычайно прочный и надежный.
- Не имеет подверженных износу механизмов сцепления, таких как дифференциалы повышенного трения.
- LOKKA проста в установке — когда-то называемая «шкафчиком на 45 минут», она может быть установлена обычным специалистом, способным самостоятельно установить тормозные колодки.
- С точки зрения шума LOKKA работает очень тихо, не вызывает чрезмерного стука шин и не громко лязгает при блокировке или разблокировке.
- Низкая стоимость LOKKA делает его одним из самых доступных шкафчиков для дифференциалов в мире.
Использование и применение
LOKKA подходит для всех применений с полным приводом, за исключением передней части некоторых автомобилей с постоянным приводом.Они используются во всех типах транспортных средств, включая 2WD, кемперы, коммерческие и гражданские автомобили, и работают в самых сложных условиях, которые только можно представить.
Конструкция хорошо подходит для конверсии двигателей большой мощности, таких как типичные модификации двигателей V8.
Конструкция рулевого механизма предотвращает раскручивание одного колеса, которое часто встречается в открытых дифференциалах и дифференциалах LSD, которые являются основной причиной повреждения трансмиссии и дифференциала.
На дороге или бездорожье по грязи, песку или холмам модель LOKKA особенно хорошо работает на участках, где требуется максимальное тяговое усилие, где требуется точное управление.Его чувствительная разблокировка обеспечивает практически бескомпромиссное рулевое управление независимо от установки на передний или задний дифференциал.
Революционный дизайн LOKKA и непревзойденная плавность хода …
Это доступно по цене и действительно является единственным шкафчиком, который стоит водить!
Самонастраивающаяся дифференциальная эволюция (jDE и iDE) — pagmo 2.16.1 документация
pagmo2.16.1
В комплекте:
- Установка
- Быстрый старт
- Возможности
- Учебник по C ++
- Документация по C ++ API
- Основные классы
- Реализованные алгоритмы
- Нулевой алгоритм
- Искусственная пчелиная семья
- Эволюционная стратегия адаптации ковариационной матрицы (CMA-ES)
- Поиск компаса
- Дифференциальная эволюция
- Самонастраивающаяся система дифференциальной эволюции (DE 1220, также известная как pDE)
- Расширенная оптимизация колонии муравьев (gaco)
- Оптимизатор серого волка (gwo)
- Улучшенный поиск гармонии (IHS)
- Ipopt
- Многоцелевой оптимизатор колоний муравьев на основе гиперобъема (MHACO)
- Многоцелевой эволюционный алгоритм путем декомпозиции (MOEA / D-DE)
- Monotonic Basin Hopping (MBH) — обобщенный
- Обработка самоадаптивных ограничений
- Решатели NLopt
- Генетический алгоритм недоминантной сортировки (NSGA-II)
- Оптимизация роя частиц при сортировке без доминирования (NSPSO)
- Оптимизация роя частиц (PSO)
- Генерация оптимизации роя частиц (GPSO)
- Самонастраивающаяся дифференциальная эволюция (jDE и iDE)
- (N + 1) -ES Простой эволюционный алгоритм
- Простой генетический алгоритм
- Имитация отжига (версия Корана)
- Экспоненциальные стратегии естественной эволюции (xNES)
- Реализованные задачи
- Реализованные острова
- Реализованные пакетные оценщики
- Реализованные топологии
- Реализованы политики замены
- Реализованные политики отбора
- Коммунальные услуги
- Разное
- Кредиты
- История изменений
01L409751 — Audi Cent.Дифференциал
Audi A8 / S8 quattro (A8Q): DPZ, DTE, DSM
Audi A4 / S4 / Avant quattro (A4Q): CJP, DKB, DRN
Audi A4 / S4 / Avant quattro (A4Q): DRN, DTV
Audi A4 / S4 / Avant quattro (A4Q): DRN, DTV, EFQ ,; EKD, EMP, FAL ,; FHH, FAS, FHJ ,; FAQ
Audi A6 allroad quattro (A6AR): EYK, FXL
Audi A4 / Avant (A4): Audi A4 / S4 / Avant quattro (A4Q): FEP, FEQ, GBF ,; GBJ
Audi A8 / S8 quattro (A8Q): EDG, FBF, FBG ,; FUN
Audi A6 / S6 quattro (A6Q): DPT, ECF, EKX ,; ECF, FBC; EMP, EKD, FAQ
Audi A6 / Avant (A6): Audi A6 / S6 quattro (A6Q): FAQ, FEJ, HCT; FBD, FUL; quattro +
Audi RS6 qu.(RS6): GAG
Номера иллюстраций: 40997, 40999
(A6) Audi A6 / Avant
(G0Q) Технические характеристики коробки передач: 5-ступенчатая автоматическая коробка передач для полноприводных автомобилей.
(A6Q) Audi A6 / S6 quattro
(G0Q) Технические характеристики коробки передач: 5-ступенчатая автоматическая коробка передач для полноприводного автомобиля.
(RS6) Audi RS6 qu.
(G0Q) Технические характеристики коробки передач: 5-ступенчатая автоматическая коробка передач для полноприводного автомобиля.
Простое руководство по дифференциалу с блокировкой G80
Это руководство предназначено для начинающих покупателей грузовиков и молодых энтузиастов, но также служит кратким напоминанием для тех, кто не может представить себе буксировку и транспортировку без помощи блокировки дифференциала.Так что же тогда такое Eaton G80?Прежде всего, вам нужно знать, что G80 не является официальным названием блокировки заднего дифференциала GM. Все называют эту часть оборудования G80 из-за кода заказа. Что касается конца сделки с Eaton, то эти ребята в основном известны тем, что производят высокотехнологичные нагнетатели.
Как яркий пример ноу-хау Eaton, Vette Z06 использует воздуходувку Eaton для своего малого блока V8 LT4. Вернемся к блокировке заднего дифференциала G80. Проще говоря, пикап, который используется для выполнения работы, не может обойтись без этой маленькой хитрости.
Другими словами, дифференциал с автоматической блокировкой Eaton G80 позволяет заднеприводному грузовику перемещаться по местам, традиционно предназначенным для пикапов с полным приводом. Улучшенное сцепление с дорогой и управляемость — вот что в целом предлагает блокируемый дифференциал G80.
Как это работает? Допустим, вы рискнули заехать на Chevrolet Silverado 1500 2015 года в глуши, например, на грязное поле. Если одно из задних колес начинает вращаться в поисках тяги, задний мост Eaton G80 блокируется автоматически.Это позволяет обоим задним колесам вывести грузовик из грязи.
Как упоминалось ранее, дифференциал включается без какого-либо участия водителя. Вы спрашиваете, когда блокируется G80? Когда разница в скорости вращения задних колес достигает 120 об / мин, таким образом, передается до 100 процентов мощности трансмиссии на оба ведущих колеса для максимальной атаки. Конечно, дифференциал G80 также может быть установлен на пикапах 4×4 для большей универсальности.
«Блокируемая ось G80 обеспечивает большее тяговое преимущество, чем дифференциалы повышенного трения в большинстве ситуаций, в то время как ее автоматическое включение не требует участия водителя, в отличие от электронных шкафчиков некоторых конкурентов, которые требуют активации водителя», — сказал Джефф Люк, GM. ответственный главный инженер. «Простота, долговечность и надежное сцепление с дорогой G80 были проверены поколениями клиентов, поскольку он был основным продуктом линейки грузовиков Chevy более 40 лет».
Если вы настаиваете на технических аспектах, мы очень обязаны сообщить вам, что Eaton G80 работает как открытый дифференциал, пока чрезмерное проскальзывание одного колеса не приведет к срабатыванию механизма блокировки. Оба задних колеса вращаются с одинаковой скоростью, что обеспечивает лучшее сцепление с дорогой, чем обычный дифференциал повышенного трения.В отличие от высокотехнологичных электронных шкафчиков, дифференциал G80 обнаруживает проскальзывание колес через какой-то регулятор веса.
Когда механизм обнаруживает проскальзывание, система сцепления с автономным питанием прижимает наклонную пластину к боковой шестерне, сжимая пакет дисков. Это действие заставляет оба вала заднего моста вращаться с одинаковой скоростью. Вместо «До свидания, ребята!» Мы считаем необходимым упомянуть, что блокируемый дифференциал Eaton G80 входит в стандартную комплектацию моделей Chevrolet Silverado 1500 LTZ и Z71, а также всех тяжелых пикапов Silverado 2500 и 3500.
Даже средний Colorado выиграет от этого, если вы выберете пакет Z71. G80 является дополнительной опцией для моделей Colorado WT и LT 2015 года выпуска. Кроме того, полноразмерные внедорожники, такие как Chevrolet Tahoe и Suburban, также выигрывают от мастерства блокировки дифференциала G80. Если вы потерялись где-то между этими строками, демонстрационное видео ниже должно прояснить ситуацию.