
Роботизированная коробка передач — что это?
Коробка робот: преимущества, недостатки
Еще совсем недавно рядовой автолюбитель не имел свободы выбора трансмиссии с покупкой автомобиля. Технологический прогресс последних лет подарил несколько интересных систем – это и вариатор, и роботизированная коробка. Техническая реализация коробки-робота велась еще в 20 лет назад, однако внедрение этой трансмиссии в массы произошло сравнительно недавно. Первую версию агрегата немецкие инженеры выпустили в 2002 году. С тех пор было придумано немалое количество его разных вариаций и модификаций.
Конструкция и принцип работы роботизированной коробки
В конструктивном плане коробка-робот идентична с обычной «механикой». Вся разница заключается в том, что подбор и переключение передач в ней это полностью автоматизированный процесс. Фактически это значит, что есть некий «мозг», который и отвечает за включение нужной скорости. Причем процесс смыкания/размыкания сцепления практически не заметен и не ощутим. Поэтому водители авто с роботом отмечают высокий уровень комфорта, простоту использования и динамичность.
Поэтому водители авто с роботом отмечают высокий уровень комфорта, простоту использования и динамичность.
Особенность робота заключается и в том, что эта коробка может совмещать как одно, так и сразу два сцепления. Внедрив в конструкцию дополнительный механизм разъединения трансмиссии от двигателя, инженеры попытались снизить негативный эффект провалов тяги. Двойное сцепление реализовано в коробках по типу DSG или Powershift. Такие коробки еще называют преселективными или «предварительно выбирающими». Они позволяют при включенной скорости выбрать следующую передачу без перерыва в работе КПП. На авто с такими коробками передача крутящего момента происходит без потерь, так как нет разрыва потока мощности.
Стоит ли приобретать автомобиль с преселективной коробкой?
Как и в случае с автоматической коробкой, функционирование робота невозможно без наличия электронной системы.![]() Датчики следят за определенными рабочими характеристиками коробки, передают информацию блоку управления, где формируются команды исполнительным механизмам с учетом прописанных алгоритмов. Предусмотрен и ручной режим работы (как Типтроник на АКПП), благодаря которому водитель имеет возможность переключать передачи за счет органов управления – селектор или переключатели, расположенные под рулем.
Датчики следят за определенными рабочими характеристиками коробки, передают информацию блоку управления, где формируются команды исполнительным механизмам с учетом прописанных алгоритмов. Предусмотрен и ручной режим работы (как Типтроник на АКПП), благодаря которому водитель имеет возможность переключать передачи за счет органов управления – селектор или переключатели, расположенные под рулем.
- ЧИТАЙТЕ ТАКЖЕ
- DSG — коробка робот от Volkswagen
- PowerShift — роботизированная коробка Ford
- Преселективная АКПП S-Tronic от Audi
Разновидности роботизированных коробок
Нередко робот является агрегатом, сконструированным на базе готового решения. Часто за основу узла инженеры берут гидромеханический автомат и внедряют фрикционное многодисковое сцепление. Также возможен вариант, когда классическая «механика» получает привод гидравлического или механического типа.
Коробка робот с электрическим приводом считается более простым и дешевым решением. Его основной недостаток – низкая скорость работы (0.3-0.5 с) с одновременным небольшим энергопотреблением. В такой коробке исполнительными механизмами выступают сервоприводы и механическая передача. В гидравлике задействованы специальные гидроцилиндры, которыми управляют электромагнитные клапаны.
Его основной недостаток – низкая скорость работы (0.3-0.5 с) с одновременным небольшим энергопотреблением. В такой коробке исполнительными механизмами выступают сервоприводы и механическая передача. В гидравлике задействованы специальные гидроцилиндры, которыми управляют электромагнитные клапаны.
Коробка с гидравликой работает шустрее, однако её функционирование подразумевает наличие в системе жидкости под давлением. Поддержка постоянного давления требует серьёзных энергетических затрат. Тем не менее, робот с гидравлическим приводом нашел свое применение на многих спортивных автомобилях, таких как Lamborghini Aventador, Ferrari 599GTO. Также его ставят на машины из среднего и премиум сегмента. Робот с электрическим приводом не составит труда обнаружить на недорогой современной машине. Рассмотрим детально распространенные модификации РКПП с двойным сцеплением.
DSG
Роботизированная коробка DSG считается наиболее «продвинутой» версией автомата. Её легко встретить на автомобилях концерна VAG.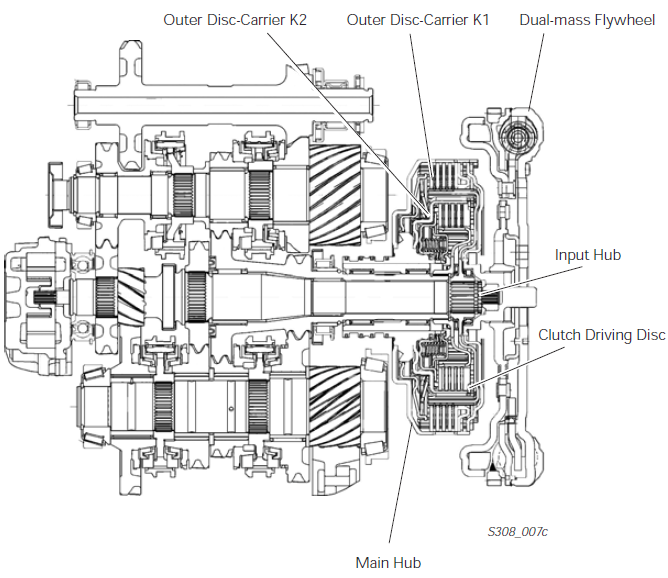 Пожалуй, это самая распространенная модификация РКПП с двойным сцеплением. То есть, это преселективная трансмиссия, переключающая передачи крайне быстро (буквально за доли секунд). Эффективность работы DSG значительно выше обычной АКПП. В ней первое сцепление отвечает за нечетные передачи, а второе за четные. В свою очередь коробки DSG принято делить на два вида – «мокрые» и «сухие». Первый вид – «мокрый» – появился первым и характеризуется наличием шести передач. Сцепление в такой DSG находится в масляной ванне, отсюда и название. Спустя время Volkswagen презентовали DSG-7. Это РКПП с «сухим» сцеплением. На практике считается более проблематичным вариантом.
Пожалуй, это самая распространенная модификация РКПП с двойным сцеплением. То есть, это преселективная трансмиссия, переключающая передачи крайне быстро (буквально за доли секунд). Эффективность работы DSG значительно выше обычной АКПП. В ней первое сцепление отвечает за нечетные передачи, а второе за четные. В свою очередь коробки DSG принято делить на два вида – «мокрые» и «сухие». Первый вид – «мокрый» – появился первым и характеризуется наличием шести передач. Сцепление в такой DSG находится в масляной ванне, отсюда и название. Спустя время Volkswagen презентовали DSG-7. Это РКПП с «сухим» сцеплением. На практике считается более проблематичным вариантом.
Познакомиться подробнее с DSG (нажмите, чтобы прочитать статью)
Интересное видео на тему того, как работает роботизированная коробка ДСГ
Проблемы
Powershift
Роботизированная трансмиссия Powershift является разработкой компании Ford, поэтому и устанавливается на автомобили североамериканского концерна. Это преселективная КПП с двумя сцеплениями. В качестве исполнительных механизмов выступают сервоприводы, которыми управляет электронный блок, закрепленный на корпусе коробки. Если верить многочисленным отзывам, то Powershift более надежна конкурентной DSG. Однако это не делает её лидером рынка, так как получила те же недостатки, что и роботизированная КПП от Volkswagen.
Познакомиться подробнее с PowerShift (нажмите, чтобы прочитать статью)
S-tronic
Компания Audi входит в состав концерна VAG, но это не мешает ей разрабатывать собственные автомобильные трансмиссии. Так инженеры Audi создали преселективную коробку S-tronic, которая сильно напоминает DSG. Но есть некоторые существенные отличия. Сегодня S-tronic ставят преимущественно на автомобили с передним и полным приводом. В ней также два сцепления, что позволяет роботу работать беспрерывно в одном потоке и без потери мощности. Еще есть R-tronic – другая модификация РКПП от компании Audi. Отличается от S-tronic наличием гидропривода. Такая коробка переключает передачи примерно за 0.8 мс, а это серьёзный показатель динамичности.
Сегодня S-tronic ставят преимущественно на автомобили с передним и полным приводом. В ней также два сцепления, что позволяет роботу работать беспрерывно в одном потоке и без потери мощности. Еще есть R-tronic – другая модификация РКПП от компании Audi. Отличается от S-tronic наличием гидропривода. Такая коробка переключает передачи примерно за 0.8 мс, а это серьёзный показатель динамичности.
Познакомиться с S-Tronic (нажмите, чтобы прочитать статью)
DCT M Drivelogic
Впервые роботом DCT M Drivelogic баварские инженеры оснастили BMW M3. Коробка может работать как в полностью автоматическом, так и в ручном режиме. В обоих случаях передачи переключаются с недостижимой механике и автомату скоростью. Водителю не нужно пользоваться селектором коробки передач. Достаточно переключить лепестковый элемент управления под рулем в нужное положение. Особенность DCT M заключается в наличии функции Drivelogic, которая позволяет водителю самостоятельно переключать передачи и переходить от спокойного стиля вождения к динамичному. Всего предусмотрено 11 программ – 5 для автоматического режима и 6 для ручного.
Всего предусмотрено 11 программ – 5 для автоматического режима и 6 для ручного.
PDK
Роботизированная КПП от компании Porsche конструктивно является узлов, в корпусе которого помещены две механически коробки. Также конструкцией предусмотрено два сцепления, поэтому PDK относится к сегменту трансмиссий с двойным сцеплением. Функционирует робот за счет гидравлического привода и электронного блока управления. Всего предусмотрено семь передач, последняя с большим передаточным отношением снижает показатель расхода топлива. Пик динамики наблюдается с активной шестой скоростью. Коробка работает в двух режимах – автоматическом и ручном (полуавтоматическом). Сегодня PDK ставят на автомобили с мощными моторами – Porsche Panamera Turbo, Porsche 911 Turbo, Porsche Cayman.
Speedshift DCT
7-ступенчатая роботизированная КПП была разработана специально для мощных автомобилей концерна Mercedes Benz и подразделения AMG. Коробка отличается наличием четырех программ и функции старта Rage AMG Speedshift. Вместо привычного гидротрансформатора в Speedshift DCT задействована компактная муфта сцепления, работающая в масляной ванне – так называемое «мокрое» сцепление. От Других модификаций РКПП этот робот отличается небольшим весом – всего 80 кг. Сделать узел легким удалось за счет применение в его изготовлении его картера легкого магниевого сплава.
Вместо привычного гидротрансформатора в Speedshift DCT задействована компактная муфта сцепления, работающая в масляной ванне – так называемое «мокрое» сцепление. От Других модификаций РКПП этот робот отличается небольшим весом – всего 80 кг. Сделать узел легким удалось за счет применение в его изготовлении его картера легкого магниевого сплава.
TCT
Компания Alfa Romeo недавно презентовала свою версию роботизированной коробки передач – Twin Clutch Transmission. В первую очередь её поставили на модель Giulietta, где она превосходно сочетается с бензиновым и дизельным мотором (разгон до «сотни» всего за 7.7 и 7.9 сек соответственно). Коробка TCT оснащена гидронасосом электрического типа, который обеспечивает работоспособность привода сцепления и механизма переключения передач. Проектировался узел при помощи специалистов компании LuK, имеющих огромный опыт в разработке и производстве автомобильных сцеплений. Некоторые конструктивные элементы TCT также выполнены из легких материалов, что делает коробку на 10 кг легче, чем классическая механика или вариатор.
Некоторые конструктивные элементы TCT также выполнены из легких материалов, что делает коробку на 10 кг легче, чем классическая механика или вариатор.
Twin Clutch SST
Робот с двойным сцеплением Twin Clutch SST ставят на автомобили Mitsubishi, например, на Lancer Evolution и Outlander XL. Это спортивная коробка, в которой вместо гидротрансформатора исправно служат два механизма сцепления, помещенные в один корпус. Отличается тремя режимами работы, которые позволяют адаптироваться автомобилю под разные условия эксплуатации. Для городской езды подходит режим Normal Mode: переключение передач происходит плавнее и мягче, расход топлива минимальный. В режиме Sport Mode переход на высшие скорости происходит на высоких оборотах, что несколько увеличивает расход. Третий режим Super Sport Mode переключает скорости на максимально высоких оборотах. Его целесообразно использовать, когда требуется полностью реализовать динамический потенциал автомобиля.
Плюсы и минусы робота
Сегодня можно найти довольно большое число автовладельцев, положительно отзывающихся о роботизированной коробке. Особенно нравится автоматизированная трансмиссия начинающим водителям. Это и понятно, ведь для управления автомобилем достаточно нажимать педаль тормоза и газа, а электронная система самостоятельно включит нужную передачу. Отсюда вытекают главные преимущества КПП:
Особенно нравится автоматизированная трансмиссия начинающим водителям. Это и понятно, ведь для управления автомобилем достаточно нажимать педаль тормоза и газа, а электронная система самостоятельно включит нужную передачу. Отсюда вытекают главные преимущества КПП:
- высокий комфорт;
- удобство;
- простота использования;
- высокая скорость переключения передач;
- экономия топлива в городском цикле;
- конструктивная схожесть с механикой, что придает агрегату дополнительную надежность, если сравнивать с тем же вариатором;
- возможность переключения ступеней в ручном режиме.
Как показывает практика, расход бензина автомобилем коробкой-роботом при одинаковых условиях в городском цикле на 20% меньше, чем у транспортного средства с привычным автоматом. Однако такое устройство далеко неидеальное. Также в процессе эксплуатации авто можно ощутить некоторые недостатки узла:
- высокая стоимость обслуживания и ремонта;
- непродолжительные задержки в переключении передач;
- дешевые модели не позволяют провести адаптацию под конкретный стиль вождения.


Специалисты прогнозируют, что по мере увеличения автомобилей с роботом, развитием технологий ремонта и обслуживания этой коробки со временем станет более доступным и дешевым ремонт агрегата. Тот самый электронно-гидравлический блок, или просто «мехатроник», является самой дорогостоящей деталью в DSG. Еще несколько лет назад в случае его даже не самой критичной поломки дилеры, не думая, ставили вердикт – замена устройства. Сейчас хватает специализированных сервисов, выполняющих простые и сложные ремонты «мехатроника».
Основные отличия от автоматической коробки
Автоматическая коробка не утратила актуальности ни с появлением вариатора, ни с появлением роботизированной трансмиссии. Это по-прежнему довольно надежный, а главное хорошо изученный агрегат. Сходство в том, что и автомат, и робот обеспечивают плавный переход с одной передачи на другую. На этом всё. Гораздо больше отличий. Главная разница между этими двумя коробками заключается в следующем:
- В АКПП не предусмотрено жесткое сцепление с двигателем;
- Робот ощутимей снижает нагрузку на мотор за счет максимально коротких переключений передач;
- С автоматической КПП автомобиль уступает в плане динамики;
- Новые РКПП еще недостаточно хорошо изучены, окончательно неизвестен ресурс этих агрегатов, чего нельзя сказать об АКПП.

Возможно, автомат даже накладней обслуживать, а вот что касается ремонта, то здесь и говорить нечего. Автоматическую коробку перебирают на каждом шагу, хватает и грамотных специалистов, способных в кратчайшие сроки восстановить агрегат после серьёзной поломки. В случае с РКПП ситуация ровно обратная.
Заключение
Мы выяснили, что такое коробка робот. Очевидно, что будущее за конструктивно и функционально совершенными автомобильными системами. Но процесс окончательного усовершенствования робота еще не начался. Перед покупкой автомобиля нужно четко уяснить для себя, каким требованиям он должен отвечать. Сказать точно, что лучше – робот или автомат – крайне сложно. И, наверное, никто не возьмется за это. Поэтому каждый автомобилист должен на основании всех плюсов и минусов определить для себя, какой тип трансмиссии удовлетворит все запросы и потребности.
Дата публикации: 18.04.2015
Источник: AKPPHELP
Как пользоваться роботизированной коробкой передач
Как известно, современные авто сегодня могут оснащаться различными типами коробок-автомат: классическая АКПП, вариаторная трансмиссия CVT, а также роботизированная коробка передач. При этом автоматическая КПП независимо от типа проще в управлении, чем «механика», однако такие коробки сложнее в плане устройства и обслуживания.
При этом автоматическая КПП независимо от типа проще в управлении, чем «механика», однако такие коробки сложнее в плане устройства и обслуживания.
Каждый из указанных типов АКПП имеет как плюсы, так и минусы. В попытке создать наилучшее решение сравнительно недавно появилась роботизированная КПП, которая сочетает в себе надежность и экономичность «механики», а также комфорт «автомата». Далее мы рассмотрим, что такое коробка передач робот и как пользоваться данным типом КПП.
Содержание статьи
- Управление роботизированной коробкой передач: что нужно учитывать
- Особенности эксплуатации РКПП
- Советы и рекомендации
- Что в итоге
Управление роботизированной коробкой передач: что нужно учитывать
Для лучшего понимания принципов работы и управления РКПП следует начать с устройства трансмиссии данного типа. Фактически, робот является механической КПП, которая при этом имеет отдельные механизмы для управления работой сцепления и включения передач. Также присутствует электронный блок управления.
Также присутствует электронный блок управления.
Получается, все те функции, которые на МКПП выполняет водитель (выжим педали сцепления, выбор передачи, включение передачи при помощи рычага) выполняют актуаторы (сервоприводы, работающие под управлением электронного блока). Водителю остается только перевести селектор коробки-робот в тот или иной режим (аналогично обычной автоматической КПП), после чего переключения передач будут происходить автоматически.
Также РКПП, подобно многим АКПП с Типтроником, имеет ручной режим переключения передач. Данный режим полуавтоматический, позволяет водителю управлять коробкой вручную, при этом не нужно выжимать сцепление (педаль попросту отсутствует). Так или иначе, режимы РКПП похожи, однако несколько отличаются от «классического» автомата. Давайте разбираться.
- Режим «N» — нейтральная передача (нейтраль). Есть как на АКПП, так и на роботах. Данный режим означает, что крутящий момент на колеса не передается, хотя двигатель работает и на саму коробку передается момент. Данный режим больше сервисный (подходит для буксировки, перекатывания авто в рембоксе), однако также может использоваться при длительном простое машины с заведенным двигателем.
- Режим «R» — реверс, задний ход. Необходим такой режим для движения назад, включается только после полной остановки авто.
- Режимы «А/М» или «Е/М» указывают на движение вперед (аналогично режиму «D» на АКПП), то есть КПП осуществляет переключение передач автоматически.
- Режим «М» позволяет перевести коробку на ручное управление (селектор нужно перевести в специальный паз). Обозначения «+» и «-» указывают, куда нужно двигать селектор для повышения и понижения передачи при ручном режиме управления.
 Данный режим больше сервисный (подходит для буксировки, перекатывания авто в рембоксе), однако также может использоваться при длительном простое машины с заведенным двигателем.
Данный режим больше сервисный (подходит для буксировки, перекатывания авто в рембоксе), однако также может использоваться при длительном простое машины с заведенным двигателем.Особенности эксплуатации РКПП
Начнем с прогрева коробки-робот. Прогревать роботизированную КПП, в отличие от АКПП, нет необходимости. Другими словами, не следует переводить селектор в разные режимы на неподвижной машине и заведенном двигателе для того, чтобы повысить температуру масла в агрегате.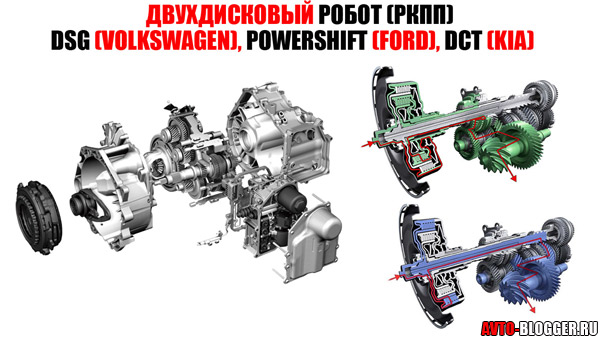
Роботизированная коробка напоминает механику, то есть не требует прогрева. Единственное, как и в случае с МКПП, после холодного пуска лучше дать мотору поработать на холостых и прогреть ДВС. Параллельно немного погреется и КПП. Если точнее, густое масло распределится по коробке, снижая нагрузку и сухое трение.
Для этого просто заведите двигатель, коробка должна оставаться в режиме «N». Спустя 5-10 мин (в зависимости от наружной температуры) можно начать движение, двигаясь плавно, без резких разгонов и высоких скоростей около 3-5 км. За это время КПП прогреется, что позволит более активно нагружать трансмиссию без рисков сильного износа.
- Движение на подъем или на спуске на машине с РКПП должно производиться с учетом особенностей такой коробки. Как правило, машины с роботом не имеют системы помощи при старте на подъеме. В отличие от автомата АКПП, робот может откатиться назад при старте на подъем (по аналогии с обычной «механикой»).
Чтобы стартовать без отката, нужно затянуть ручник, затем убрать ногу с педали тормоза и немного добавить газ, одновременно опуская стояночный тормоз. Это позволит избежать отката авто назад. Данный прием требует практики, так что рекомендуется отдельно провести тренировку, пока водитель не почувствует момент начала схватывания сцепления.
Это позволит избежать отката авто назад. Данный прием требует практики, так что рекомендуется отдельно провести тренировку, пока водитель не почувствует момент начала схватывания сцепления.
Также зимой оптимально трогаться в ручном режиме на первой передаче, при этом не сильно нажимать на газ. Если активно дросселировать, колеса могут начать буксовать. Если машина с роботом преодолевает подъем, при этом включен автоматический режим, роботизированная КПП начнет сама переключаться на пониженные передачи. В устройстве коробки есть гироскоп, определяющий положение кузова. Такая работа логична, так как на подъеме нужно больше тяги и обороты двигателя должны быть высокими.
При этом можно перейти и в ручной режим, выбрав одну передачу. Однако следует помнить, что робот не позволит двигаться в натяг, то есть обороты во время преодоления подъема должны быть не ниже 2500 об/мин. Что касается движения на спуске, от водителя каких-либо действий не требуется. Можно использовать как автоматический, так и ручной режим. При этом эффект торможения двигателем будет явно выражен.
При этом эффект торможения двигателем будет явно выражен.
- При кратковременных простоях с заведенным мотором (до 3-5 минут) важно понимать, что переводить рычаг из положения «A» в «N» не обязательно, однако стоит учитывать, что в режиме «А» на неподвижном авто при нажатой педали тормоза сцепление остается включенным.
Если машина стоит дольше, лучше переключиться в нейтраль. Что касается парковки, после полной остановки селектор нужно перевести в нейтраль «N», затянуть ручник и далее глушить двигатель.
- Также часто коробка робот имеет допрежимы (спортивный, зимний). Так вот, зимний режим обозначается пиктограммой в виде значка «снежинки». Режим направлен на то, чтобы трогаться как можно более плавно, избегая пробуксовок на льду или в снегу. Если просто, в этом режиме машина стартует сразу со второй передачи, а также максимально плавно переходит на повышенные.
Спортивный режим S позволяет сильнее раскручивать мотор, то есть переход на повышенную передачу происходит позже, чем в обычном автоматическом режиме работы КПП.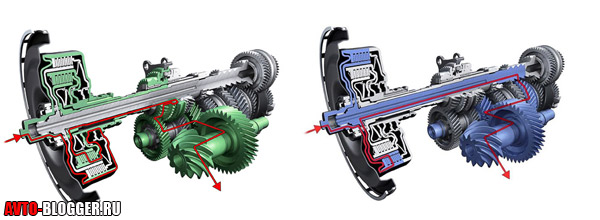 Режим «спорт» на коробке робот нужен для активного разгона, совершения обгонов и маневрирования.
Режим «спорт» на коробке робот нужен для активного разгона, совершения обгонов и маневрирования.
- Еще добавим, что во время езды можно без всяких ограничений переходить из полностью автоматического режима в ручной, а также обратно. Параллельно можно вручную повышать и понижать передачу.
Однако нужно учитывать, что ручной режим полностью таковым не является. Управление коробкой все равно контролирует электронный блок. Например, при движении с высокой скоростью водитель не сможет сразу переключиться на две ступени «вниз».
ЭБУ коробкой учитывает обороты двигателя, после чего включит только ту передачу, которой данные обороты соответствуют. Получается, происходит переход только на допустимую передачу, а не на ту, которую пытается включить водитель.
Фактически, такая особенность является защитой коробки и мотора от ошибок водителя и поломок. В ЭБУ прописаны алгоритмы, по которым для каждой передачи отдельно определен допустимый диапазон оборотов двигателя.
Если выбранная водителем передача в ручном режиме соответствует диапазону, коробка включит эту скорость, если же обороты не соответствуют выбранной передаче, ЭБУ включит ту скорость, которая оптимально «подходит » по диапазону оборотов.
Советы и рекомендации
Хотя коробка робот похожа на автомат, нужно учитывать определенные уникальные особенности. Прежде всего, такая коробка на рассчитана на агрессивную эксплуатацию, больше подходит спокойным водителям.
Это значит, что при езде на РКПП лучше избегать резких нажатий на газ. При необходимости активного разгона лучше или заранее переходить в ручной или спортивный режим, или же нажимать на газ плавно.
Что касается торможения, в этом случае лучше всего подходит полностью автоматический режим работы роботизированной коробки передач. Также характерной особенностью РКПП является наличие легких толчков при переключениях передач. Еще могут возникать задержки и провалы, то есть коробка долго «думает» в том случае, если водитель, двигаясь плавно, вдруг принимает решение резко ускориться.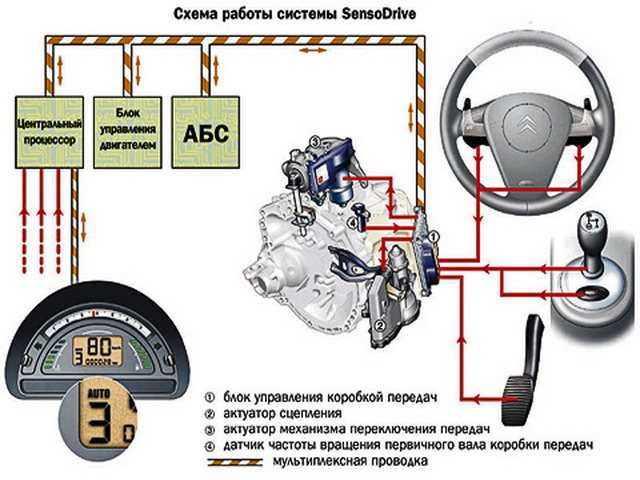
Если говорить о толчках, от водителя потребуется привыкнуть к такой особенности. Еще можно немного сгладить толчки, отпуская педаль газа в момент, когда КПП переключает передачу. Это позволяет немного понизить обороты двигателя (аналогично езде на механической коробке).
Даже с учетом того, что робот конструктивно похож на механику, буксовать на такой коробке все равно не рекомендуется. Если для «классических» АКПП пробуксовки весьма опасны перегревом масла в автомате, на роботе выходит из строя сцепление, сильно изнашиваются сервомеханизмы, сбиваются их калибровочные настройки.
Это значит, что в ручном режиме выехать «в раскачку» можно, однако такое решение может не пройти без последствий, как в случае с механикой. Если машина застряла, лучше попытаться выбраться не своим ходом или вытолкать автомобиль.
Рекомендуем также прочитать отдельную статью о том, что такое коробка робот. Из этой статьи вы узнаете о видах роботизированных КПП, как они работают, какие преимущества и недостатки имеет коробка робот по сравнению с другими типами трансмиссий и т. д.
д.
Еще следует отметить, что каждые 10 тыс. км. необходимо проводить диагностику РКПП, а также делать инициализацию (адаптацию) коробки робот. Такой подход позволит повысить качество работы и избежать преждевременных поломок. Дело в том, что в отличие от водителя на МКПП, который самостоятельно управляет работой сцепления, робот не способен учитывать износ сцепления.
Получается, «точка схватывания» смещается, коробка может начать дергаться, переключения передач жесткие. Чтобы этого избежать, робот нужно «обучать», позволяя учесть изменившиеся по мере износа параметры.
Что в итоге
Как видно, роботизированная коробка передач типа АМТ является достаточно неплохой альтернативой в бюджетном сегменте. Фактически, РКПП является промежуточным звеном между МКПП и «классическими» автоматами, позволяя получить владельцу преимущества автомата по доступной цене.
Однако нужно учитывать, что по комфорту роботы данного типа сильно отстают от АКПП и вариаторов, а также ресурс сервомеханизмов и сцепления на таких КПП обычно находится на отметке около 100 тыс.![]() км. При этом актуаторы достаточно дорогие и плохо поддаются качественному ремонту.
км. При этом актуаторы достаточно дорогие и плохо поддаются качественному ремонту.
Напоследок отметим, что сегодня многие производители оснащают свои авто роботизированными коробками данного типа. Главное, перед началом эксплуатации водитель должен учитывать все особенности такой трансмиссии, а также нужно заранее знать, как управлять роботизированной коробкой передач.
Гармонический привод | Описание, преимущества и факты
Harmonic Drive или Harmonic Gear
См. все материалы
- Связанные темы:
- машина
Просмотреть все связанные материалы →
Harmonic Drive , также называемое Harmonic Drive gear , гармоническое зубчатое колесо или волновое зубчатое колесо , механическое устройство изменения скорости, изобретенное в 1950 с, что уменьшает передаточное число роторной машины для увеличения крутящего момента. Он работает по принципу, отличному от принципа обычных переключателей скорости. Устройство состоит из тонкого кольца, которое упруго отклоняется при вращении внутри жесткого круглого кольца немного большего размера.
Он работает по принципу, отличному от принципа обычных переключателей скорости. Устройство состоит из тонкого кольца, которое упруго отклоняется при вращении внутри жесткого круглого кольца немного большего размера.
Базовый Harmonic Drive состоит из трех элементов: кругового шлица, гибкого шлица и генератора волн. Круговой шлиц имеет внутренние зубья, которые входят в зацепление с внешними зубьями гибкого шлица. У гибкого шлица меньше зубьев и, следовательно, меньший эффективный диаметр, чем у кругового шлица. Генератор волн имеет эллиптическую форму и действует как связующее звено с двумя роликами, которые вращаются внутри гибкого шлица, заставляя его постепенно зацепляться с круговым шлицем в диаметрально противоположных точках. Если генератор волн (вход) вращается по часовой стрелке, а круговой сплайн зафиксирован, гибкий сплайн (выход) будет вращаться или катиться внутри кругового сплайна с гораздо меньшей скоростью в направлении против часовой стрелки.
Отношение входной скорости к выходной скорости зависит от разницы в количестве зубьев на круговом шлице и на гибком шлице. Передаточное число до 320:1 может быть достигнуто в одноступенчатых Harmonic Drives, которые легче, меньше и эффективнее, чем обычные приводы с высоким передаточным отношением. Составные приводы могут создавать передаточные отношения до 1 000 000 к 1. Либо круговой шлиц, либо гибкий шлиц, либо генератор волн могут быть зафиксированы, в то время как два других элемента служат входом и выходом.
Передаточное число до 320:1 может быть достигнуто в одноступенчатых Harmonic Drives, которые легче, меньше и эффективнее, чем обычные приводы с высоким передаточным отношением. Составные приводы могут создавать передаточные отношения до 1 000 000 к 1. Либо круговой шлиц, либо гибкий шлиц, либо генератор волн могут быть зафиксированы, в то время как два других элемента служат входом и выходом.
Уникальной и полезной характеристикой Harmonic Drive является его способность передавать движение через герметичные стены. Зубья гибкого шпона могут быть размещены вблизи центра длинной герметично запаянной гибкой цилиндрической трубки. Генератор волн может находиться внутри трубы, и своим вращением он может отклонять гибкую сплайн и производить медленное вращение окружающего кругового шлица. В вращательно-линейной версии Harmonic Drive используется винт, и управляющий стержень перемещается в головке ядерного реактора без механического контакта через герметичную трубу. Системы Harmonic Drive полезны для увеличения выходного крутящего момента в зубчатых передачах, используемых при фрезеровании, производстве и в машинах, использующих роботизированные руки. Они использовались в различных приложениях, начиная от таких недорогих потребительских товаров, как торговые автоматы, и заканчивая сложными системами для военного и аэрокосмического использования.
Они использовались в различных приложениях, начиная от таких недорогих потребительских товаров, как торговые автоматы, и заканчивая сложными системами для военного и аэрокосмического использования.
Редакторы Британской энциклопедии Эта статья была недавно отредактирована и дополнена Джоном П. Рафферти.
Подготовка к работе с роботами | Национальное географическое общество
1. Используйте велосипед, чтобы объяснить основы снаряжения.
Покажите предоставленную фотографию шестеренки или покажите шестеренку классу. Спросите: Кто-нибудь может сказать мне, что это такое и для чего оно служит? Объясните, что это шестерня, и шестерни используются для увеличения или уменьшения силы, увеличения или уменьшения скорости или для передачи или изменения направления движения.
Спросите: Может ли кто-нибудь сказать мне, к чему подключены педали на обычном велосипеде? Объясните, что педали обычно соединены с самой большой шестерней ближе к передней части..jpg) Покажите изображение велосипеда. Спросите: Что соединяет эту большую шестерню с другой шестерней велосипеда? (Шестерни соединены цепью.) Скажите учащимся, что шестерни, соединенные цепью, передают мощность от педали к заднему колесу. Итак, когда человек крутит педали велосипеда, энергия, которую он или она прилагает, превращается в энергию, которая двигает велосипед вперед. Покажите классу настоящий велосипед, если возможно, или еще раз изображение велосипеда. Предложите учащимся указать на шестерни, цепь и педали и понаблюдать, как все они взаимосвязаны внутри велосипеда.
Покажите изображение велосипеда. Спросите: Что соединяет эту большую шестерню с другой шестерней велосипеда? (Шестерни соединены цепью.) Скажите учащимся, что шестерни, соединенные цепью, передают мощность от педали к заднему колесу. Итак, когда человек крутит педали велосипеда, энергия, которую он или она прилагает, превращается в энергию, которая двигает велосипед вперед. Покажите классу настоящий велосипед, если возможно, или еще раз изображение велосипеда. Предложите учащимся указать на шестерни, цепь и педали и понаблюдать, как все они взаимосвязаны внутри велосипеда.
Спросите: Кто-нибудь крутил педали на велосипеде в гору? На ровной поверхности? Что проще? Что сложнее? Почему? Предложите учащимся обсудить свой опыт езды на велосипеде и объяснить, что шестерни в велосипеде преобразуют энергию, которую они прилагают, в энергию, которая заставляет велосипед двигаться.
2. Примите участие в групповой демонстрации передач с использованием повседневных предметов.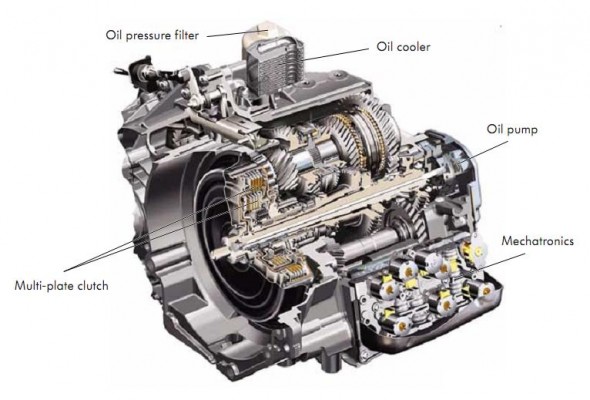
Спросите : Почему шестерни имеют зубья? ( Шестерни имеют зубья для предотвращения проскальзывания.) Спросите : Если бы у шестерни не было зубьев, что бы это было? (В большинстве случаев шестерня без зубьев будет колесом. Существуют относительно редкие версии шестерен без зубьев, но почти все шестерни имеют зубья.) Скажите учащимся, что это означает, что мы можем экспериментировать с поведением шестерни, используя другие круглые или круглые объекты. Положите два теннисных мяча рядом на стол перед классом. Вызовите добровольца и попросите ученика положить руку на мяч справа, а кончик пальца на верхнюю часть мяча слева. Попросите ученика повернуть мяч справа по часовой стрелке, осторожно удерживая другой мяч на месте кончиком пальца. Это должно заставить шар слева вращаться против часовой стрелки. Попросите ученика описать, в каком направлении вращается каждый шарик.
Вызовите двух дополнительных добровольцев. Поместите третий теннисный мяч на прямую линию рядом с первыми двумя теннисными мячами. Попросите одного добровольца положить кончик пальца на средний шарик, чтобы удерживать его на месте, в то время как два других добровольца поворачивают внешние шарики по часовой стрелке. Предложите учащимся описать, в каком направлении вращается каждый шарик. Объясните учащимся, что две взаимосвязанные шестерни будут вращаться в противоположных направлениях. Это меняет направление силы внутри системы. При добавлении третьей передачи направление силы последней передачи в цепи совпадает с направлением силы первой передачи в цепи.
Попросите одного добровольца положить кончик пальца на средний шарик, чтобы удерживать его на месте, в то время как два других добровольца поворачивают внешние шарики по часовой стрелке. Предложите учащимся описать, в каком направлении вращается каждый шарик. Объясните учащимся, что две взаимосвязанные шестерни будут вращаться в противоположных направлениях. Это меняет направление силы внутри системы. При добавлении третьей передачи направление силы последней передачи в цепи совпадает с направлением силы первой передачи в цепи.
Попросите нового волонтера. Подарите ему или ей баскетбольный и теннисный мяч. Попросите добровольца положить баскетбольный мяч справа от себя, а теннисный мяч слева и соединить мячи так, чтобы они соприкасались. Теперь попросите ученика положить руку на каждый мяч и повернуть баскетбольный мяч по часовой стрелке на четыре полных оборота, осторожно удерживая кончик пальца сверху теннисного мяча. Помогите посчитать обороты баскетбольного мяча, пока доброволец наблюдает за движением теннисного мяча. Попросите студента описать, что он или она наблюдали. Попросите студента повторить демонстрацию, на этот раз повернув теннисный мяч на четыре полных оборота и описав движение баскетбольного мяча.
Попросите студента описать, что он или она наблюдали. Попросите студента повторить демонстрацию, на этот раз повернув теннисный мяч на четыре полных оборота и описав движение баскетбольного мяча.
Объясните учащимся, что, используя шестерни разных размеров, они могут изменять скорость (скорость) системы; это называется передаточным числом. Например, если у вас есть две шестерни (А и В) и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость). Если вы поменяете передачи, скорость (скорость) будет уменьшена. Итак, теннисный мяч вращается с другой скоростью, чем баскетбольный.
3. Поэкспериментируйте с зубчатыми колесами и ремнями, используя катушки и перфорированную доску.
Разделите класс на рабочие группы по 2-4 человека в зависимости от количества имеющихся материалов. Раздайте каждой группе доску, десять колышков, восемь катушек (четыре маленьких и четыре больших), четыре резинки и раздаточный материал «Готовимся с роботами».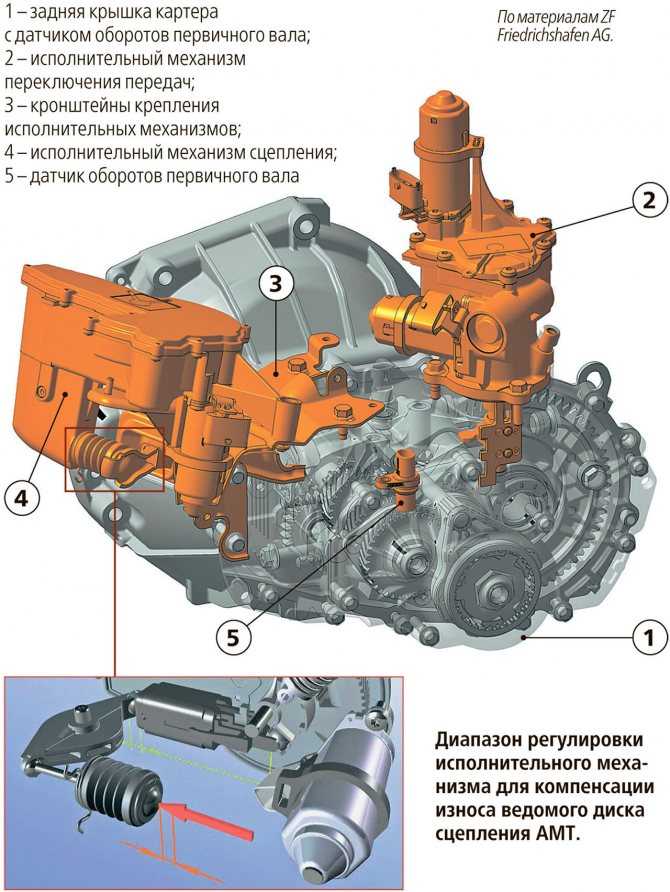 Дайте им следующие инструкции или попросите студентов следовать вашей демонстрации. Задавайте вопросы, чтобы проверить понимание и прогресс учащихся. Предложите учащимся, у которых лучше развито зрение, прочитать шаги, представленные в раздаточном материале «Подготовка с помощью роботов», во время работы. Если учащимся нужна помощь, покажите фотогалерею «Готовимся вместе с роботами», пока они работают.
Дайте им следующие инструкции или попросите студентов следовать вашей демонстрации. Задавайте вопросы, чтобы проверить понимание и прогресс учащихся. Предложите учащимся, у которых лучше развито зрение, прочитать шаги, представленные в раздаточном материале «Подготовка с помощью роботов», во время работы. Если учащимся нужна помощь, покажите фотогалерею «Готовимся вместе с роботами», пока они работают.
4. Учащиеся используют доски и катушки для решения задач, связанных с шестернями.
Скажите учащимся, что теперь они будут работать в команде, чтобы решить ряд задач, в решении которых используются шестеренки. Скажите им, что они должны работать в команде, чтобы решить каждую из этих задач, используя свои доски, катушки и резиновые ленты. Выполните столько задач, сколько позволяет время, или дайте каждой группе отдельное задание для работы. После каждого задания помогите выполнить задание. Шаг 5.
- Задача 1. Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии; кроме того, необходимо изменить направление движения, чтобы робот двигался вперед, а не назад. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему?
- Задача 2. Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии, но направление движения не нужно менять. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему?
- Задача 3: Робот должен двигаться быстрее, чем позволяет его источник энергии, и инженер готов пожертвовать мощностью ради скорости. Есть большая шестерня, маленькая шестерня и ремень для работы. Какая шестерня находится рядом с источником энергии для увеличения скорости?
- Задача 4. Роботу требуется больше мощности для перемещения по крутым склонам, и инженер готов пожертвовать скоростью. Есть большая шестерня, маленькая шестерня и ремень для работы. Какое снаряжение размещается рядом с источником энергии для получения мощности?
5. Попросите группы студентов поделиться своими решениями задач.
Попросите группы студентов поделиться своими решениями задач.
Попросите группы показать свои доски и объяснить свои решения. Обязательно предложите учащимся объяснить, почему они сделали то, что сделали. Примеры решений этих задач представлены в фотогалерее Gear Challenge Solutions.
Разрешить бесплатные эксперименты, если позволяет время.
Неформальное оценивание
В индивидуальном порядке учащиеся смогут продемонстрировать решения этих проблем с использованием шестерен, используя упражнение:
- Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии; кроме того, необходимо изменить направление движения, чтобы робот двигался вперед, а не назад. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? (Две шестерни, соединенные ремнем по схеме «восьмерка»)
- Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии, но направление движения не нужно менять. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? (Две шестерни соединены ремнем)
- Робот должен двигаться быстрее, чем позволяет его источник энергии, и инженер готов пожертвовать мощностью ради скорости. Есть большая шестерня, маленькая шестерня и ремень для работы. Чтобы увеличить скорость, какую шестерню поставить рядом с источником энергии? (Большая шестерня)
- Роботу требуется больше мощности для передвижения по крутым склонам, и инженер готов пожертвовать скоростью. Есть большая шестерня, маленькая шестерня и ремень для работы. Какое снаряжение размещается рядом с источником энергии для получения мощности? (Малый редуктор)
 Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? (Две шестерни соединены ремнем)
Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? (Две шестерни соединены ремнем)Примеры фотографий этих решений включены в фотогалерею Gear Challenge Solutions.
Расширение обучения
Предложите учащимся найти шестеренки в классе. Примером могут служить шестеренки в классных часах.
Предметы и дисциплины
- Физика
Цели обучения
Учащиеся:
- Поймут, что шестерни позволяют увеличивать или уменьшать скорость или силу
- Понимать, что шестерни позволяют менять направление движения
- Применить понимание зубчатых колес для решения простых задач
Подход к обучению
- Обучение для использования
Методы обучения
- Кинестетические/тактильные
Обзор навыков
Это задание направлено на следующие навыки:
- Результаты студентов 21 века
- Обучение и инновационные навыки
- Критическое мышление и решение проблем
- Обучение и инновационные навыки
- Навыки критического мышления
- Анализ
- Применение
- Создание
- Оценка
- Вспоминая
- Понимание
- Научная и инженерная практика
- Анализ и интерпретация данных
- Задавать вопросы (для науки) и формулировать проблемы (для техники)
- Построение объяснений (для науки) и разработка решений (для инженерии)
- Разработка и использование моделей
- Участие в споре с доказательствами
- Получение, оценка и передача информации
- Планирование и проведение расследований
- Использование математики и вычислительного мышления
Связь с национальными стандартами, принципами и практиками
Национальные стандарты научного образования
- (5-8) Стандарт A-1: Способности, необходимые для проведения научных исследований
- (5-8) Стандарт А-2: Понимание научных исследований
- (5-8) Стандарт Б-2: Движения и силы
- (5-8) Стандарт Б-3: Передача энергии
- (5-8) Стандарт Е-1: Способности технологического проектирования
- (5-8) Стандарт Е-2: Понимание науки и техники
- (К-4) Стандарт А-1: Способности, необходимые для проведения научных исследований
- (К-4) Стандарт А-2: Понимание научных исследований
- (К-4) Стандарт Б-2: Положение и движение объектов
- (К-4) Стандарт Е-1: Способности технологического проектирования
- (К-4) Стандарт Е-2: Понимание науки и техники
Научные стандарты нового поколения
- Инженерное проектирование:
3-5-ЭТС1-1. Определите простую задачу проектирования, отражающую потребность или желание, которая включает определенные критерии успеха и ограничения по материалам, времени или стоимости.
- Инженерный проект: МС-ЭТС1-1. Определить критерии и ограничения проблемы проектирования с достаточной точностью, чтобы гарантировать успешное решение, принимая во внимание соответствующие научные принципы и потенциальное воздействие на людей и природную среду, которое может ограничить возможные решения.
 Определите простую задачу проектирования, отражающую потребность или желание, которая включает определенные критерии успеха и ограничения по материалам, времени или стоимости.
Определите простую задачу проектирования, отражающую потребность или желание, которая включает определенные критерии успеха и ограничения по материалам, времени или стоимости.Что вам понадобится
Материалы, которые вы предоставите
- 10 штифтов на группу
- 1 Баскетбольный мяч
- 1 штифт на группу
- 3 теннисных мяча
- 4 резинки на группу
- 8 катушек, больших и малых, на группу
Требуемая технология
- Доступ в Интернет: Требуется
Физическое пространство
- Класс
Настройка
Обустройте класс так, чтобы всем было легко увидеть демонстрации.
Группировка
- Обучение в больших группах
Исходная информация
Шестерни используются в машинах для изменения взаимосвязи между приводным механизмом машины (например, двигателем) и ее движущимися частями (например, рукой робота). Их можно найти в машинах, которые мы видим и используем каждый день, таких как часы, велосипеды и автомобили.
Шестерня представляет собой круглую деталь с канавками по периметру. Эти канавки образуют возвышения, называемые зубцами, с промежутком между каждым зубцом. Когда зубья двух или более шестерен подходят друг к другу, они работают вместе, чтобы влиять на крутящий момент (силу вращения) механической системы, либо увеличивая, либо уменьшая силу, или они будут влиять на направление движения. Две взаимосвязанные шестерни вращаются в противоположных направлениях, изменяя направление силы.
Диаметр шестерни играет важную роль в системе; с помощью шестерен разного размера можно изменять скорость (скорость) системы. Передаточное отношение – это сравнение количества зубьев в двух шестернях, которые работают вместе. Например, если у вас есть две шестерни (А и В), и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость) меньшей шестерни. Чтобы помочь учащимся визуализировать эту концепцию, покажите, как шестеренки за циферблатом часов поворачивают часовую и секундную стрелки. Передаточное отношение также можно определить, сравнив количество зубьев одной шестерни с количеством зубьев другой шестерни.
Передаточное отношение – это сравнение количества зубьев в двух шестернях, которые работают вместе. Например, если у вас есть две шестерни (А и В), и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость) меньшей шестерни. Чтобы помочь учащимся визуализировать эту концепцию, покажите, как шестеренки за циферблатом часов поворачивают часовую и секундную стрелки. Передаточное отношение также можно определить, сравнив количество зубьев одной шестерни с количеством зубьев другой шестерни.
Предыдущие знания
- Нет
Рекомендуемая предыдущая деятельность
- Нет
Словарь
шестерня
Существительное
зубчатое колесо, зубья которого входят в зацепление с зубьями другого колеса для передачи или приема силы и движения.
Передаточное число
Существительное
отношение числа зубьев одной шестерни к числу зубьев другой шестерни.
крутящий момент
Существительное
момент силы или системы сил, стремящихся вызвать вращение.
Статьи и профили
- Шестерни и шкивы
Интерактивы
- Техасский университет в Остине: AIM for Engineering, учебные материалы
Веб-сайты
- Брейн-поп: шестерни
Наконечники и модификации
МодификацияОбъясните младшим учащимся, что в задачах шестерни — это катушки, а ремни — резиновые ленты.
Наконечник Магнитные наборы шестерен, которые прикрепляются к белой или классной доске, или простые пластиковые наборы шестерен можно использовать для демонстрации передач вместо баскетбольных и теннисных мячей, если таковые имеются.![]()