
Как работает ESP — ДРАЙВ
- Войти
- Регистрация
- Забыли пароль?
- user
- Выход
- Наши
тест-драйвы - Наши
видео - Цены и
комплектации - Сообщество
DRIVE2
- Новости
- Наши тест-драйвы
- Наши видео
- Поиск по сайту
- Полная версия сайта
- Войти
- Выйти
- Acura
- Alfa Romeo
- Aston Martin
- Audi
- Bentley
- Bilenkin Classic Cars
- BMW
- Brilliance
- Cadillac
- Changan
- Chery
- CheryExeed
- Chevrolet
- Chrysler
- Citroen
- Daewoo
- Datsun
- Dodge
- Dongfeng
- DS
- FAW
- Ferrari
- FIAT
- Ford
- Foton
- GAC
- Geely
- Genesis
- Haima
- Haval
- Hawtai
- Honda
- Hummer
- Hyundai
- Infiniti
- Isuzu
- JAC
- Jaguar
- Jeep
- KIA
- Lada
- Lamborghini
- Land Rover
- Lexus
- Lifan
- Maserati
- Mazda
- Mercedes-Benz
- MINI
- Mitsubishi
- Nissan
- Opel
- Peugeot
- Porsche
- Ravon
- Renault
- Rolls-Royce
- Saab
- SEAT
- Skoda
- Smart
- SsangYong
- Subaru
- Suzuki
- Tesla
- Toyota
- Volkswagen
- Volvo
- Zotye
- УАЗ
- Kunst!
- Тесты шин
- Шпионерия
- Автомобизнес
- Техника
- Наши дороги
- Гостиная
- Автоспорт
- Авторские колонки
- Acura
- Alfa Romeo
- Aston Martin
- Audi
- Bentley
- BCC
- BMW
- Brilliance
- Cadillac
- Chery
- CheryExeed
- Chevrolet
- Chrysler
- Citroen
- Daewoo
- Datsun
- Dodge
- Dongfeng
- DS
- FAW
- Ferrari
- FIAT
- Ford
- Foton
- GAC
- Geely
- Genesis
- Great Wall
- Haima
- Haval
- Hawtai
- Honda
- Hummer
- Hyundai
- Infiniti
- Isuzu
- JAC
- Jaguar
- Jeep
- KIA
- Lada
- Lamborghini
- Land Rover
- Lexus
- Lifan
- Maserati
- Mazda
- Mercedes-Benz
- MINI
что это такое в автомобиле, принцип работы и неисправности системы стабилизации
С развитием электронных систем помощи водителя в ходе управлении автомобилем, появилась возможность для вмешательства электроники в некоторых сложных ситуациях, когда навыков новичка уже не хватает. Автоматика действует быстрее, а главное правильнее, поскольку её программы написаны на основании знаний квалифицированных специалистов, как по практическому вождению, так и по теории поведения автомобиля.
Автоматика действует быстрее, а главное правильнее, поскольку её программы написаны на основании знаний квалифицированных специалистов, как по практическому вождению, так и по теории поведения автомобиля.
Содержание статьи:
Зачем нужна электронная система стабилизации автомобиля
Одна из подобных программ, в совокупности с датчиками, микрокомпьютерами и исполнительными механизмами, получила название Electronic Stability Program (ESP), что означает систему контроля над стабильностью автомобиля при потере колёсами сцепления с дорогой или на грани такой потери.
Это важно: Что лучше полный привод, передний или задний
Не обязательно употребление именно такого термина, разные автомобильные фирмы могут использовать другие обозначения, в том числе и на других языках.
ESP призвана обеспечить курсовую стабилизацию автомобиля, то есть способность двигаться прогнозируемо для водителя и не терять управляемость, насколько это вообще возможно.
Естественно, когда сцепление потеряно окончательно и никакие действия уже не помогут, в пассажира превратится не только водитель, но и все его автоматические помощники, чуда не произойдёт.
Но если ещё существует возможность вернуть машину на траекторию и успокоить её колебания, просто водитель в силу разных причин с этим не справится, то электроника обязательно поможет.
В определённой степени ESP можно сравнить с идеальным человеком, обладающим мгновенной реакцией и самыми лучшими навыками, к тому же располагает такими органами управления, которых у водителя нет вообще.
Читайте также: Причины быстрого износа деталей тормозной системы
Даже автогонщики, долго и упорно тренировавшиеся, могут повлиять на ситуацию только косвенно, поскольку они при всём желании неспособны, в частности, управлять торможением отдельных колёс. В лучшем случае они перераспределят тормозной баланс по осям и то, далеко не на каждом автомобиле такое возможно.
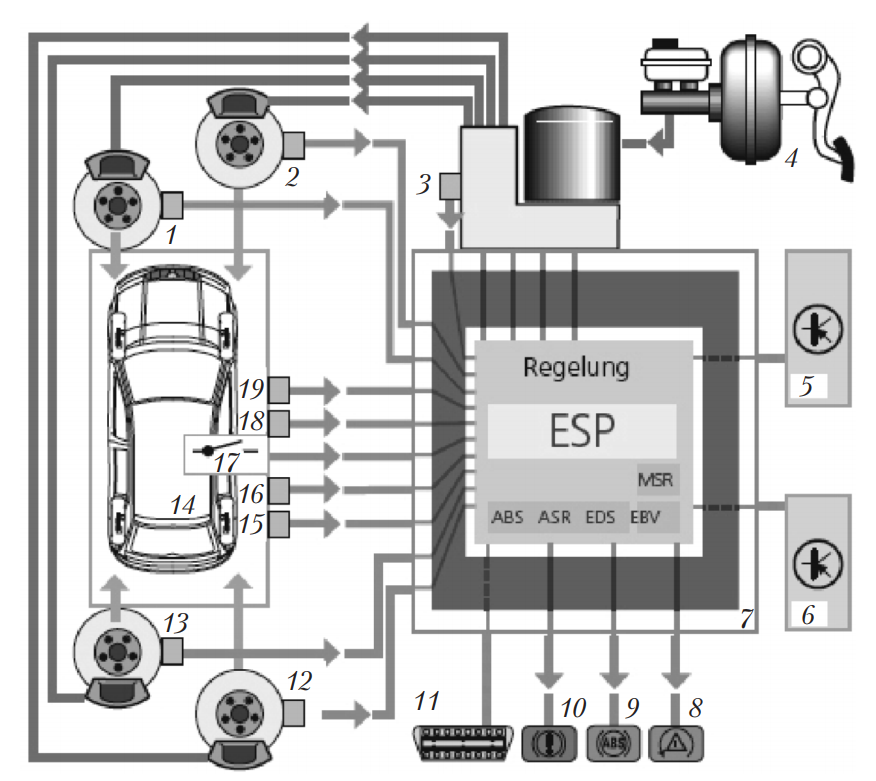
Устройство ESP
В состав системы входят устройства, которые до её появления применялись в антиблокировочных системах тормозов, а также ряд новых, работающих только на стабилизацию:
- вся гидравлика системы ABS, включающая быстродействующий насос тормозной жидкости, гидроаккумулятор, систему клапанов;
- электронный блок управления с программой;
- датчики вращения колёс;
- датчик угла поворота руля;
- датчик вращения автомобиля вокруг вертикальной оси;
- датчик ускорения по всем направлениям;
- датчики органов управления, тормозной и акселераторной педали;
- интерфейсные устройства связи с двигателем, усилителем руля и коробкой передач;
- в некоторых дорогих и продвинутых системах могут быть добавлены специальные устройства в трансмиссии, например муфты и управляемые дифференциалы.
Таким образом, инженеры получают в свои руки мощное оборудование, способное серьёзно повлиять на перераспределение векторов тяги и тормозного усилия в любом направлении и под любым углом.
Осталось только разработать алгоритмы управления всей системой и тщательно отработать их миллионами тестовых километров, как и всё, имеющее отношение к безопасности.
Принцип работы Electronic Stability Program
Из теории автомобиля известно, что существуют два нежелательных явления при движении – избыточная и недостаточная поворачиваемость.
В идеале, когда наступает предел сцепления колёс с дорогой, автомобиль должен скользить наружу поворота всеми четырьмя колёсами с одинаковой интенсивностью, точно так же прекращая скольжение одновременно передней и задней осью.
Реально это случается редко, поэтому одна ось неминуемо обгоняет другую, что приводит к появлению ненулевого угла между продольной осью автомобиля и касательной к его траектории.
Причём угол увеличивается, реакция водителя может быть неправильной или запоздалой, машина начинает совершать курсовые колебания, что и означает потерю стабилизации и переход в неуправляемое вращение.
Избыточная управляемость означает опережение в уводе или срыве задней оси. Машина поворачивает нос внутрь поворота, развитие явления принято называть заносом. В определённой мере это условно, но терминология сложившаяся.
Читайте также: Что такое тормозной суппорт и как он работает
Обратная ситуация считается недостаточной управляемостью. Первой срывается передняя ось, автомобиль «плужит», уходя наружу поворота, при этом почти не слушается руля, поскольку наименьшее сцепление именно у управляемых колёс.
Занос
Попасть в занос может любой автомобиль, хотя у заднеприводных, тем более заднемоторных компоновок такая вероятность больше, поскольку именно на заднюю ось приходится избыток тяги в первом случае и основная масса во втором.
Ещё в автошколах водителей учат, что для компенсации заноса надо поворачивать руль в сторону заноса и сбрасывать газ.
Советы настолько же правильные, насколько, как это ни парадоксально, бесполезные, и даже вредные:
- водитель и так инстинктивно вывернет руль в сторону заноса, это естественное движение в случаях, когда нос машины уходит в сторону от траектории;
- необходимо точно дозировать угол и время поворота руля, на что неопытный человек не способен;
- для стабилизации машины надо выполнить компенсирующее обратное движение руля, чему не учат;
- сброс газа поможет только заднеприводной машине, при заносе переднего привода или полного газ надо наоборот, добавлять.
Система ESP отреагирует куда адекватней, просто притормозив наружное колесо, а также обеспечив правильное управление тягой, в зависимости от типа привода.
Сам тип начавшейся потери управляемости компьютер заметит по датчику вращения кузова и воздействию водителя на рулевое колесо. Причём влияние будет строго дозированным, без возникновения колебательного процесса.
Причём влияние будет строго дозированным, без возникновения колебательного процесса.
Предотвращается самое страшное и типичное развитие ситуации, когда машину начинает «разматывать» с нарастанием амплитуды и выбрасывает с дороги на втором или третьем лихорадочном вращении руля запаниковавшим водителем.
Таким образом, вмешательство системы проявится двояко:
- произойдёт компенсация заноса на первом же колебании кузова;
- отклонение от траектории плавно погасится, без заброса в обратную от первого смещения сторону.
Пока машина сохраняет хоть какое-то сцепление с дорогой, ESP способна надёжно погасить занос в самом его начале, водитель не успеет даже испугаться, а скорее всего ничего и не заметит.
Прочитайте обязательно: Где самое безопасное место в машине для ребенка
Единственное, что ему доступно в штатной ситуации – высвечивание лампочки на передней панели, говорящей, что система сработала и надо быть осторожней, машина на пределе устойчивости.
Снос
При опережающей потери зацепа на передней оси автомобиля, да ещё и переднем приводе, ситуация становится совсем неприятной для рядового водителя:
- скользят именно управляемые колёса, машина не реагирует на поворот руля;
- для компенсации надо совершать действия, прямо противоположные инстинктивным, распускать руль в ту же сторону, куда сносит нос машины, а вместо сброса газа поддерживать нейтральную тягу на передних колёсах или даже добавлять крутящий момент;
- всё происходит неожиданно, поскольку переднеприводные машины устойчивее по своей природе;
- снос может совершенно внезапно перейти в занос из-за продольного перераспределения веса автомобиля.
ESP точно так же, как и в предыдущем случае, спокойно отреагирует подтормаживанием нужных колёс, возьмёт на себя управление тягой, а изменением степени усиления рулевого управления прозрачно намекнёт водителю на неправильные действия рулём.
С работающими на пределе передними колёсами система ничего делать не станет, им и так тяжело, а аккуратно притормозит заднее внутреннее колесо. Обычно этого достаточно для стабильного восстановления траектории.
Обычно этого достаточно для стабильного восстановления траектории.
Неисправности
Поскольку ESP базируется на всех основных узлах антиблокировочной системы тормозов, то и её неисправности связаны с ними. Нарушения в работе самой программы маловероятны.
- Чаще всего отказывают датчики вращения колёс и их проводка, поскольку они работают в самых тяжёлых условиях.
- Проблемы могут быть связаны с гидравлическим блоком, его насосом и клапанами. Особенно если пренебрегать плановой заменой тормозной жидкости.
- Все прочие датчики отказывают не чаще, чем любая другая электроника, причинами могут стать естественное старение компонентов, влага и коррозия. Как всегда, особое внимание проводке.
При отказе система самодиагностики высветит соответствующую лампу на приборной панели. Ездить без ESP очень нежелательно, поведение машины станет непривычным, а с самыми мощными двигателями водитель может просто не справиться с управлением.
 Ехать нельзя!» src=»https://www.youtube.com/embed/bxTVbsrfBXs?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Ехать нельзя!» src=»https://www.youtube.com/embed/bxTVbsrfBXs?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Плюсы и минусы
Все достоинства системы понятны из описания её действий в критических ситуациях. Она спасёт автомобиль, когда уже ничто другое ему не поможет.
Более того, при быстрой езде иногда неопытные водители в независимых тестах опережали автоспортсменов, у которых такой системы не было. Не стоит на это надеяться, но ESP умножает способности водителя, если конечно они не нулевые.
Но случаются и неприятные ситуации.
- В самых тяжёлых случаях ESP неэффективна, у колёс уже нет сцепления с дорогой, а нестандартным приёмам опытного водителя она не обучена.
- Пока плохо проработаны алгоритмы управления тягой двигателя, особенно её добавления на передне- и полноприводных автомобилях. Хотя для тех же автоспортсменов это азы, без которых на дороге им нечего делать.
 Но автоматизации такие приёмы поддаются с большим трудом.
Но автоматизации такие приёмы поддаются с большим трудом. - Иногда система неверно понимает хаотичное вращение руля неопытным водителем. По заложенной в неё логике безопасности, упрощенно говоря, она должна подчиняться человеку, способности которого ей неизвестны. Поэтому радикально действовать, отстранив его от управления, ESP пока не имеет права.
 Но автоматизации такие приёмы поддаются с большим трудом.
Но автоматизации такие приёмы поддаются с большим трудом.Для борьбы с недостатками существует одно средство – кнопка отключения ESP, имеющаяся на многих автомобилях. Пользоваться ею надо только когда точно известны последствия.
Хотя полностью система не отключается и в этом случае, просто существенно снижается порог её вмешательства.
Можно ли установить систему ESP на автомобиль с ABS
Теоретически возможно изменение конструкции автомобиля с добавлением в него функций ESP.
Для этого заменяется штатный контроллер ABS на такой же, но с новыми функциями, главный тормозной цилиндр, проводка, крепёжные детали, устанавливаются подходящие для данной модели дополнительные датчики и перепрошиваются программы управления.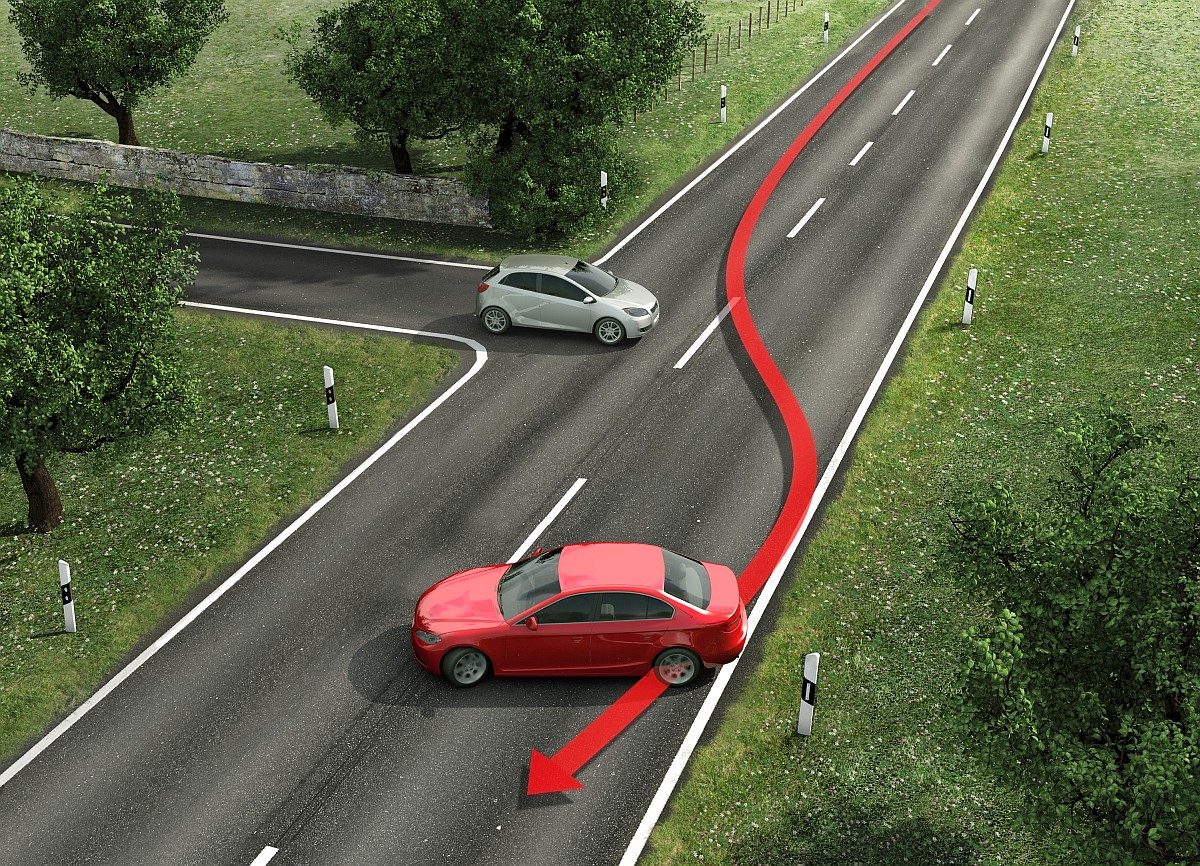 Работа достаточно сложная и дорогая.
Работа достаточно сложная и дорогая.
Но необходимости в этом практически нет. Во-первых, система давно стала штатной и обязательной для всех новых автомобилей, а во-вторых вмешательство в конструкцию тормозной системы запрещено законодательно.
Ошибки в работе здесь могут непоправимо повлиять на безопасность, что даст эффект, противоположный желаемому. Это занятие лишь для неисправимых энтузиастов тюнинга автомобилей, которых единицы.
Всем остальным проще поменять автомобиль, если уж он настолько стар, что в нём отсутствует такая полезная система.
Зачем нужна система курсовой стабилизации (ESP) в автомобиле?
Конкуренция между производителями вынуждает их заниматься усовершенствованием своих автомобилей, делать их более безопасными, внедрять новые системы.
Это продукт разработки известного немецкого концерна Daimler-Benz. Патент на нее был получен в 1959 году, но из-за технического несовершенства ее внедрение в серийное производство было отложено до 1995 года. Первым полигоном для испытания ESP стало элитное купе «Mercedes» 600 CL.
Читайте также: Подушки безопасности (Airbag) — особенности, принцип работы и назначение
Причиной для установки этой системы стали большие размеры этого «мерса» по высоте. На поворотах при высокой скорости движения у машины возрастала вероятность попадания в занос. Использование системы динамической стабилизации позволило добиться желаемого результата: безопасность движения существенно улучшилась.
Что это – ESP?
Появление системы обусловлено развитием электронной промышленности, так как ее работа основана на управлении курсовой устойчивости авто подобным блоком. Сейчас прогресс дошел до такого уровня, что установка ESP считается обычным делом для всех автомобилей, в том числе и машин бюджетного сегмента. В первое же время ею могли похвастаться только авто премиального класса.
Сейчас прогресс дошел до такого уровня, что установка ESP считается обычным делом для всех автомобилей, в том числе и машин бюджетного сегмента. В первое же время ею могли похвастаться только авто премиального класса.
В разных марках она может называться по-разному: VSC, DSC, ESC и т. д. Каждый завод-изготовитель по-своему трактует название.
Расскажем на примере популярных брендов, как может быть зашифрована система:
- DTSC – в автомобилях «Volvo»;
- ESC – известных азиатских марках «Kia», «Huyndai», «Honda»;
- VSA – японской «Acura»;
- DSC – «BMW», «Jaguar», «Land Rover»;
- VSC – «Toyota»;
- VDC – «Nissan», «Infiniti», «Subaru».
Вне зависимости от аббревиатуры суть ее не меняется. Она следит за выбранным курсом движения автомобиля и предотвращает возможные негативные явления.
Во время движения по дороге возникают факторы, которые могут изменить курс машины. Это:
– перестройка между рядами;
– обгон;
– прохождение поворотов;
– возникновение экстремальных ситуаций.
В этих случаях возрастает вероятность, особенно на мокрой или скользкой дороге, попадания в занос. Это чревато созданием аварийной ситуации, получением травм водителем и пассажирами, серьезными повреждениями машины.
Электронные «мозги» автомобиля при помощи датчиков внимательно следят за изменением направления движения и влияния поперечных сил на транспортное средство. При получении информации, что машина выходит за рамки дозволенных параметров, ЭБУ дает команду на механизмы трансмиссии, которая выравнивает колеса в нужном положении.
Устройство и принцип работы ESP
Система динамической стабилизации или, как ее еще называют, курсовой устойчивости, состоит из электронного блока управления и датчиков. Последних – несколько.
Они установлены на передней и задней оси автомобиля:
- G-сенсор (поперечного ускорения).
- Угловой скорости.
- Скорости вращения колес (входят в систему ABS).
- Давления жидкости в системе торможения.
- Расположения руля.
Помимо антиблокировочной системы колес (ABS), ESP активно взаимодействует с противопробуксовочным блоком (ASR), устройствами распределения тормозных усилий (EBD) и блокировки дифференциала (EDS). Все они являются частями единой системы активной безопасности автомобиля.
Получив тревожную информацию от датчиков, ЭБУ раздает команды для приведения в работу вспомогательных устройств. ESP выполняет крайне важную работу, о которой водитель порой не догадывается: автомобиль сохраняет курсовую устойчивость, продолжает нормальное движение.
Механизм исполнения
Вопрос: зачем нужна эта система – сейчас не стоит даже у скептиков. Своей работой она доказала свою эффективность. ESP самостоятельно определяет: работу какого из колес машины нужно стабилизировать. Это может быть левое или правое, переднее или заднее, одно или несколько колес.
Рассмотрим ситуацию. При прохождении правого поворота из-за большой скорости передние колеса попали в занос. Чтобы выровнять положение, умное устройство притормаживает заднее, ближнее к повороту, колесо, добиваясь попадания в поворотный радиус колес передней оси. В это же время подается команда на снижение оборотов мотора. Если в занос на подобном повороте попала задняя ось авто, то аналогичные действия происходят с передним левым колесом.
Чтобы выровнять положение, умное устройство притормаживает заднее, ближнее к повороту, колесо, добиваясь попадания в поворотный радиус колес передней оси. В это же время подается команда на снижение оборотов мотора. Если в занос на подобном повороте попала задняя ось авто, то аналогичные действия происходят с передним левым колесом.
Противозаносная система, народное название технического термина, обладает следующим алгоритмом работы:
- Датчики передают информацию о критическом изменении параметров в электронный блок управления.
- ЭБУ отправляет команду на то колесо, которое необходимо притормозить.
- Гидроблок ABS повышает давление жидкости в этой части тормозной системы.
- Одновременно передается сигнал о снижении подачи горючего, тем самым замедляя движение автомобиля и уменьшая скорость вращения колес.
Комплекс этих мер безопасности позволяет выправить ситуацию, предотвратить занос. Система курсовой устойчивости эффективно работает как с механической КПП, так и «автоматом». В последнем случае оно изменяет режим движения, «заставляет» переключаться АКПП на низшую передачу.
В последнем случае оно изменяет режим движения, «заставляет» переключаться АКПП на низшую передачу.
ESP действует в любой фазе движения. Это может быть: торможение, движение накатом, старт и т. д. Ее реакция на появление нестандартной ситуации мгновенная – 20 мс. Система успевает сработать на различной скорости движения автомобиля при любой передаче.
Рекомендации по работе с ESP
Не следует думать, что применение подобной системы дает возможность водителю менее внимательно относиться к управлению машиной. Возможности «умного» устройства не безграничны.
Оно не сможет принести помощь, а автомобиль избежать печальных последствий при:
- движении в гололед;
- эксплуатации машины с «лысой» резиной;
- вхождении в поворот с малым радиусом на высокой скорости.
Для обеспечения эффективной работы ESP шины должны быть накачаны по нормативам. Их типоразмер обязан соответствовать требованиям производителя для конкретной модели. Система не будет правильно работать при размещении на колесах цепей противоскольжения, дефектах механизмов двигателя, трансмиссии.
Система не будет правильно работать при размещении на колесах цепей противоскольжения, дефектах механизмов двигателя, трансмиссии.
На некоторых автомобилях установлена кнопка отключения работы ESP. Это дает возможность водителям со стажем самостоятельно выходить из затруднительной ситуации, применяя на практике свои знания. Совмещать в таком случае работу системы и свои попытки решения выравнивания курса авто, не рекомендуется.
Например, опытный автолюбитель, пытаясь выйти из заноса, нажимает педаль газа. В этот же момент ЭБУ устройства дает обратную команду на снижение оборотов. Возникают противоречия в работе, что существенно влияет на безопасность движения.
Отключать ESP рекомендуется при поездках по сыпучей поверхности, допустим, пескам, где ее работа становится неэффективной.
Понравилась статья? Поделитесь в соц. сетях:
сетях:
Система динамической стабилизации | Автомобильный справочник
Система динамической стабилизации предназначена для контроля поперечной динамики автомобиля и предотвращение срыва автомобиля в занос и боковое скольжение посредством компьютерного управления моментами силы колес. Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Содержание
Функции системы динамической стабилизации
Причиной большого числа ДТП является человеческий фактор. Даже при обычных условиях движения водитель и автомобиль могут достигнуть своих физических пределов вследствие, к примеру, неожиданного поворота дороги, внезапно появившегося препятствия или непредвиденного изменения состояния дорожного покрытия. Увеличение скорости также может привести к потере водителем уверенного контроля над автомобилем, если силы поперечного ускорения, воздействующие на автомобиль, в такой ситуации достигнут уровня, требующего от водителя слишком больших усилий.
При резком изменении сцепления шин с дорогой автомобиль внезапно начинает вести себя не так, как ожидает водитель, исходя из своего опыта. В таких экстремальных ситуациях водитель зачастую уже не способен самостоятельно стабилизировать автомобиль; как правило, в состоянии паники он своими действиями лишь усугубляет потерю устойчивости. В результате образуется значительное расхождение между продольным движением автомобиля и его продольной осью (угол дрейфа β). Даже путем поворота рулевого колеса в противоположном направлении обычный водитель сможет самостоятельно восстановить устойчивость лишь при угле дрейфа не более 8°.
Система динамической стабилизации (ESP) — именно под этим названием компания Bosch вывела на рынок свою систему управления динамикой движения — вносит значительный вклад в преодоление таких ситуаций, помогая водителю сохранить управляемость автомобиля в физических рабочих пределах. Датчики постоянно фиксируют поведение и водителя, и автомобиля. Путем сравнения фактического состояния с заданным, подходящим к той или иной ситуации, в случае значительных расхождений система вмешивается в работу тормозной системы и силового агрегата для стабилизации автомобиля (рис. «Боковая динамическая реакция легкового автомобиля с ESP» ).
Путем сравнения фактического состояния с заданным, подходящим к той или иной ситуации, в случае значительных расхождений система вмешивается в работу тормозной системы и силового агрегата для стабилизации автомобиля (рис. «Боковая динамическая реакция легкового автомобиля с ESP» ).
Встроенная функциональность антиблокировочной системы (ABS) предотвращает блокирование колес при нажатии на тормоз, в то время как аналогично интегрируемая система управления тяговым усилием (TCS) предотвращает пробуксовывание колес при трогании с места и разгоне. ESP — это комплексная система, охватывающая возможности, выходящие далеко за рамки ABS и комбинации ABS и TCS. Эта система предотвращает отклонение автомобиля от курса с заносом задней оси (избыточная поворачиваемость) или передней оси (недостаточная поворачиваемость), автомобиль слушается руля в рамках физически возможного.
Система ESP базируется на испытанных и зарекомендовавших себя компонентах систем ABS и TCS. Таким образом, можно активно тормозить воздействуя на отдельные колеса с высоким уровнем динамической реакции. На крутящий момент двигателя и, соответственно, тягу и пробуксовывание колес можно повлиять с помощью системы управления двигателем. Эти системы сообщаются между собой, к примеру, по шине CAN.
Требования к системе динамической стабилизации
Система динамической стабилизации (ESP) помогает повысить безопасность дорожного движения. Она улучшает поведение автомобиля на дороге в рамках физически возможного. Реакция автомобиля остается предсказуемой для водителя, и автомобиль становится более управляемым в критических ситуациях.
В рамках физических возможностей автомобиля курсовая устойчивость автомобиля улучшается во всех состояниях — при полном и частичном торможении, движении накатом, разгоне, обгоне и изменениях нагрузки, а также, к примеру, в случае экстремальных маневров (при панической реакции). Значительно снижается риск заноса.
В ряде ситуаций эффективность торможения достигается путем использования тяговых характеристик при вмешательстве ABS и TCS, и когда активировано управление тяговым крутящим моментом двигателя (автоматическое увеличение оборотов двигателя для подавления избыточного тормозного момента двигателя). Это приводит к сокращению тормозного пути и увеличению тяги, улучшению устойчивости и повышению уровня чувствительности рулевого управления.
Некорректные вмешательства систем могут сказаться на безопасности. Комплексная концепция безопасности обеспечивает своевременное обнаружение всех неисправностей, которых не удается избежать, и система ESP полностью или частично отключается в зависимости от типа неисправности.
Многочисленные исследования показали, что ESP значительно снижает количество ДТП, вызванных заносом, и уровень смертности в ДТП. Как следствие, оснащение автомобилей системой ESP стало обязательным в США и Канаде с сентября 2011 года.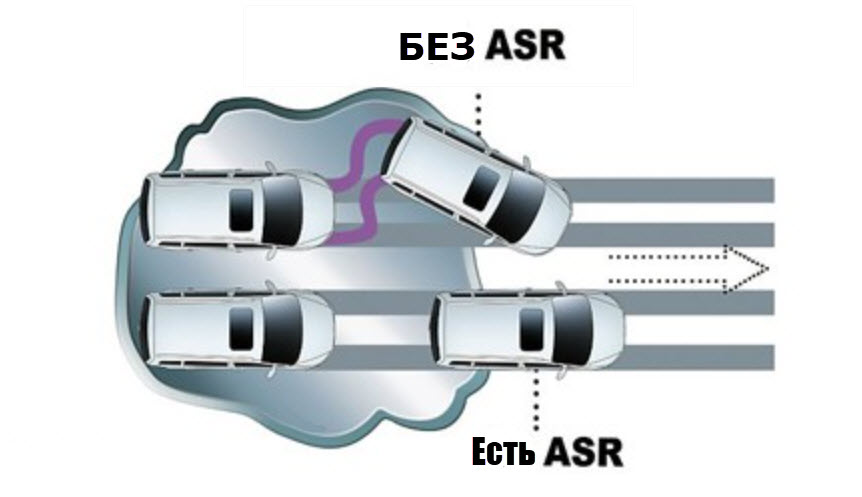 В Евросоюзе (ЕС), все новые легковые автомобили и легкие грузовики должны оснащаться системой ESP с ноября 2011 года (неотъемлемая часть ECE-R 13Н). Для остальных новых автомобилей установлен переходный период до конца 2014 года. В других регионах, например, в Японии и Австралии, также будут вводиться такие требования.
В Евросоюзе (ЕС), все новые легковые автомобили и легкие грузовики должны оснащаться системой ESP с ноября 2011 года (неотъемлемая часть ECE-R 13Н). Для остальных новых автомобилей установлен переходный период до конца 2014 года. В других регионах, например, в Японии и Австралии, также будут вводиться такие требования.
Принцип действия системы динамической стабилизации
Система динамической стабилизации (ESP) использует тормозную систему автомобиля и силовой агрегат для коррекции продольного и поперечного движения автомобиля в критических ситуациях. Когда подключается система динамической стабилизации, она смещает приоритеты управления тормозной системой. Основная функция колесных тормозов-замедление и/или остановка автомобиля — становится вторичной по важности, поскольку происходит вмешательство ESP для сохранения курсовой устойчивости автомобиля. ESP может также ускорять приводные колеса путем вмешательства в работу двигателя, повышая устойчивость.
Оба механизма воздействуют на движение автомобиля. При движении по окружности в устойчивом состоянии существует определенная связь между усилиями на рулевом колесе и результирующим поперечным ускорением автомобиля и, соответственно, силами на шинах в поперечном направлении (эффект подруливания). Силы, воздействующие на шину в продольном и поперечном направлениях, зависят от пробуксовки шины. Это означает, что на движение автомобиля можно повлиять через скольжение шин. Торможение отдельных колес, например, заднего колеса на внутреннем радиусе поворота в случае недостаточной поворачиваемости или переднего колеса на внешнем радиусе поворота в случае избыточной поворачиваемости помогает как можно более точно выдержать заданную траекторию движения автомобиля.
Типичный маневр автомобиля
Чтобы сравнить, как автомобиль будет вести себя в экстремальной ситуации с ESP и без ESP, рассмотрим следующий пример.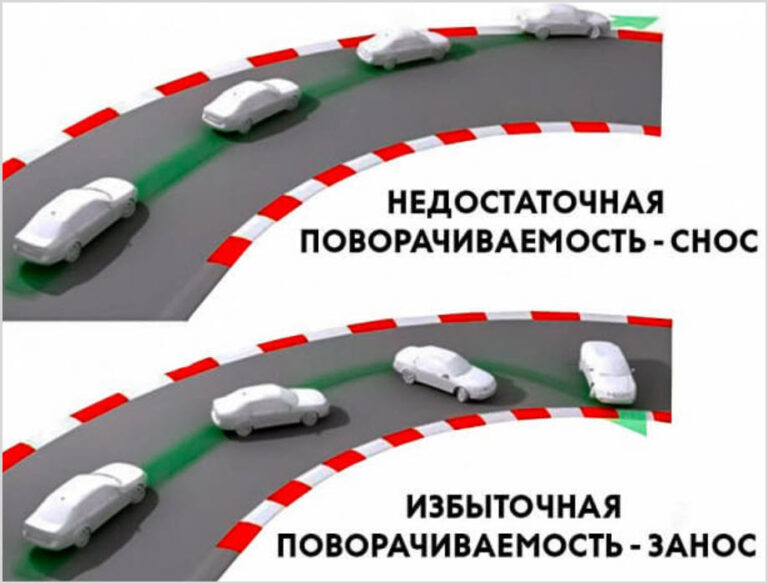 Маневр движения отражает текущую ситуацию и базируется на программах моделирования, разработанных на основе результатов испытаний. Результаты были подтверждены последующими дорожными испытаниями.
Маневр движения отражает текущую ситуацию и базируется на программах моделирования, разработанных на основе результатов испытаний. Результаты были подтверждены последующими дорожными испытаниями.
Быстрое маневрирование и выруливание
На рис. «Курсовая устойчивость во время последовательного прохождения правого/левого поворота» изображена реакция автомобиля без ESP и автомобиля с ESP при прохождении серии S-образных участков с быстрым маневрированием и выруливанием на дороге с высоким коэффициентом сцепления шин с дорогой (μ = 1), без притормаживания и на исходной скорости 144 км/ч. На рис. «Кривые динамической реакции при последовательном прохождении поворотов» изображены кривые параметров динамической реакции. В начале, при приближении к S-образному участку, условия для обоих автомобилей и их реакции идентичны. Затем водители начинают маневрировать (фаза 1).
Автомобиль без ESP
Как видно из рисунка, после начальной фазы резкое маневрирование у автомобиля без ESP уже угрожает потерей управляемости (рис. а, «Курсовая устойчивость во время прохождения поворотов» фаза 2). В то время как вращение руля быстро создало значительные поперечные силы на передних колесах, имеет место определенная задержка создания аналогичных сил на задних колесах. Автомобиль реагирует вращением по часовой стрелке вокруг своей вертикальной оси. Он лишь реагирует на попытки водителя вырулить (фаза 3), так как уже потерял управляемость. Резко возрастают скорость рыскания и угол бокового увода, и автомобиль срывается в занос (фаза 4).
Автомобиль с ESP
Автомобиль с ESP стабилизируется после первоначального маневрирования путем активного торможения переднего левого колеса для устранения угрозы потери устойчивости (рис. b, «Курсовая устойчивость во время прохождения поворотов» фаза 2): это происходит без вмешательства водителя. Это действие ограничивает занос внутрь, уменьшая скорость рыскания и стабилизируя угол разворота при движении по инерции. После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
b, «Курсовая устойчивость во время прохождения поворотов» фаза 2): это происходит без вмешательства водителя. Это действие ограничивает занос внутрь, уменьшая скорость рыскания и стабилизируя угол разворота при движении по инерции. После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
Структура системы динамической стабилизации
Цель системы управления динамикой
Контроль характеристик управляемости в пределах физически возможного направлен на то, чтобы сохранить три степени свободы автомобиля в плоскости дороги — линейную скорость vx, поперечную скорость vy и скорость ψ вращения вокруг вертикальной оси — в контролируемых пределах.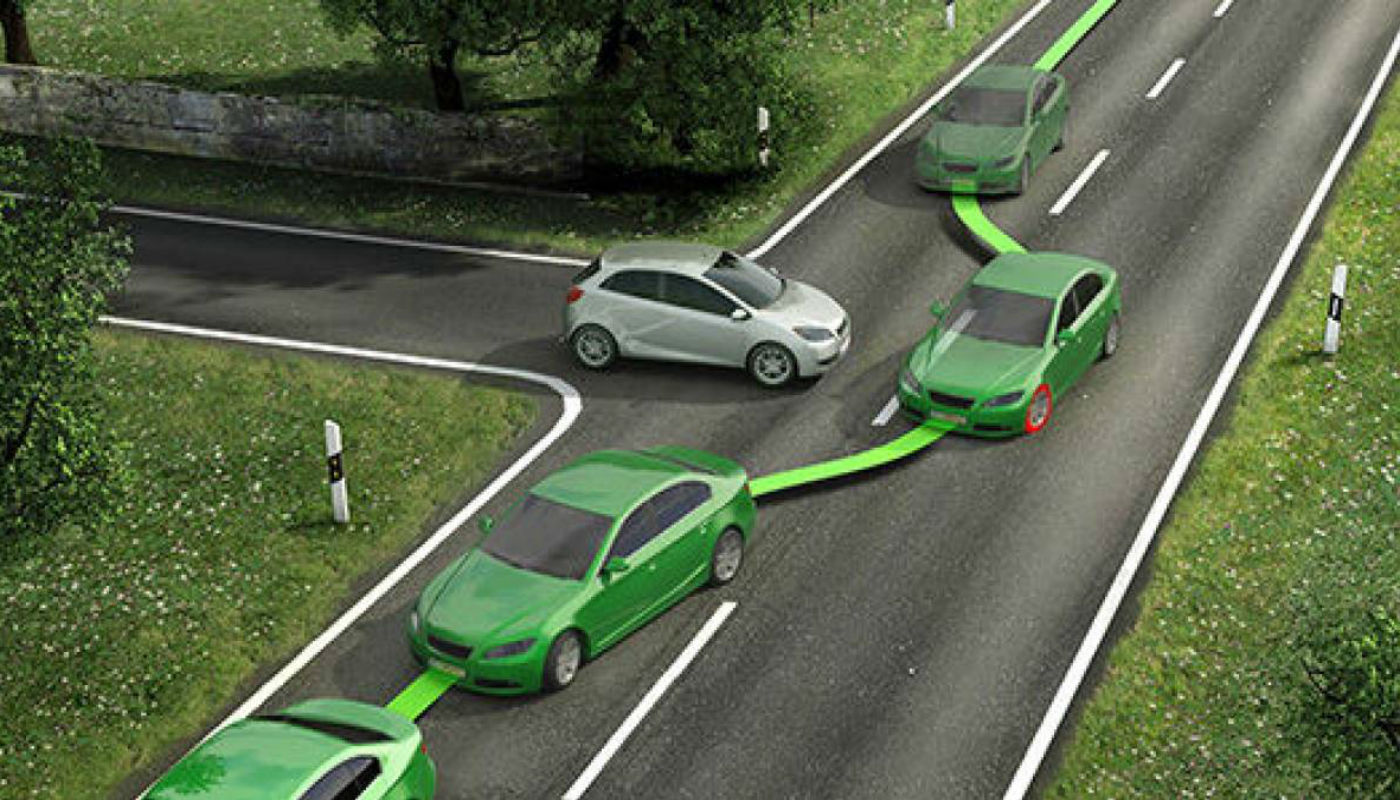 Задуманный водителем маневр преобразуется в динамическую реакцию автомобиля, адаптируемую к характеристикам дороги в рамках процесса оптимизации, нацеленного на обеспечение максимальной безопасности.
Задуманный водителем маневр преобразуется в динамическую реакцию автомобиля, адаптируемую к характеристикам дороги в рамках процесса оптимизации, нацеленного на обеспечение максимальной безопасности.
Структура системы и управления
Система ESP состоит из автомобиля как управляемой системы, датчиков, определяющих вводные переменные, исполнительных органов для коррекции тормозных, движущих и поперечных сил, а также иерархически структурированных контроллеров — контроллера поперечной динамики (высший уровень) и контроллеров колес (низший уровень) (рис. «ESP — общая система управления» ). Контроллер высшего уровня определяет заданные значения для контроллеров низшего уровня в виде моментов или скольжения или их изменений. Внутренние системные переменные, не измеряемые напрямую, такие как угол дрейфа β определяются при оценке условий движения.
Чтобы определить номинальное поведение, анализируются сигналы, соответствущие командам водителя. Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе (желаемое замедление, получаемое из тормозного давления, измеренного в гидравлическом блоке) и положения педали акселератора (желаемый крутящий момент двигателя). При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе (желаемое замедление, получаемое из тормозного давления, измеренного в гидравлическом блоке) и положения педали акселератора (желаемый крутящий момент двигателя). При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
В целях получения требуемого момента рыскания необходимо, чтобы изменения в величинах тормозного момента и относительного скольжения колес определялись посредством контроллера ESP. Эти величины затем устанавливаются контроллерами низшего уровня — контроллерами относительного скольжения и тягового усилия с помощью исполнительного механизма гидравлической тормозной системы и привода управления работой двигателя.
Оценка состояния движения
Для определения стабилизирующих вмешательств важно не только знать сигналы от датчиков угловых скоростей колес vwhl, давление на впуске рAdm, скорость вращения вокруг вертикальной оси поперечное ускорение ψ, угол поворота рулевого колеса δ и крутящий момент двигателя, но и ряд других внутренних системных переменных, которые могут быть измерены косвенно. К ним, к примеру, относятся силы, действующие на шины в продольном, поперечном и нормальном направлениях (Fx, Fy и Fn), линейная скорость vx, значения относительного скольжения шин λi, угол бокового увода колес а на одной оси, угол дрейфа β поперечная скорость автомобиля vy и коэффициент сцепления μ. Они определяются по сигналам датчиков на базе вычислительных моделей.
Линейная скорость автомобиля vx имеет ключевую важность для всех контроллеров бокового увода колес и поэтому должна вычисляться с очень большой точностью. Это делается на основе автомобильной модели с использованием измеренных угловых скоростей колес. Здесь необходимо учитывать влияние многочисленных факторов. Скорость автомобиля vx уже в нормальных ситуациях вследствие торможения или пробуксовки отличается от линейных скоростей вращательного движения колес vwhl. У полноприводных автомобилей, в частности, необходимо учитывать особенности привода колес. На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
Это делается на основе автомобильной модели с использованием измеренных угловых скоростей колес. Здесь необходимо учитывать влияние многочисленных факторов. Скорость автомобиля vx уже в нормальных ситуациях вследствие торможения или пробуксовки отличается от линейных скоростей вращательного движения колес vwhl. У полноприводных автомобилей, в частности, необходимо учитывать особенности привода колес. На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
Управляемость автомобиля меняется при обычной эксплуатации в ответ на изменения нагрузки, сопротивления движению (например, уклон дороги или изменение типа покрытия, ветер) или износ (например, тормозных колодок).
При всех этих граничных условиях линейная скорость автомобиля должна оцениваться с отклонением в несколько процентов для обеспечения стабилизирующего вмешательства в необходимой степени.
Контроллер поперечной динамики
Задачей контроллера поперечной динамики является вычисление фактического поведения автомобиля на основании, например, сигнала скорости вращения вокруг вертикальной оси и угла дрейфа, и сделать поведение автомобиля в экстремальной по динамике ситуации как можно более близким к поведению в обычной ситуации (номинальное поведение).
Связь, существующая при движении по окружности в устойчивом состоянии между скоростью вращения вокруг вертикальной оси и углом поворота рулевого колеса δ, линейной скоростью автомобиля vx и характеристическими переменными, используется для определения номинального поведения. Применяя одноколейную модель, получаем:
ψ = (vx / l) δ (1/ 1+(vx/vch)2)
в качестве базы для расчета номинального движения автомобиля. В этой формуле l означает расстояние между передней и задней осями. Геометрические и физические параметры модели автомобиля обобщены в «характеристической скорости автомобиля» vch.
Геометрические и физические параметры модели автомобиля обобщены в «характеристической скорости автомобиля» vch.
В этом случае переменная ψ ограничивается соответственно текущим коэффициентам скольжения и конкретными свойствами динамики автомобиля и ситуации движения (инициируемые водителем торможение или разгон) и такими условиями, как наличие уклона или различие в коэффициентах скольжения (μ-разделение). Таким образом, команда водителя известна как номинальная скорость вращения вокруг вертикальной оси ψNom.
Контроллер поперечной динамики сравнивает измеренную скорость вращения вокруг вертикальной оси с номинальной и в случае значительных отклонений вычисляет момент вращения вокруг вертикальной оси, необходимый для совпадения переменной величины фактического состояния с номинальным значением. На более высоком уровне контролируется угол дрейфа β и по мере роста значений все в большей степени учитывается в расчете стабилизирующего момента вращения вокруг вертикальной оси ΔMZ. Эта выходная переменная контроллера применяется посредством входных переменных тормозного момента и проскальзывания отдельных колес, корректируемых контроллерами нижнего уровня.
Эта выходная переменная контроллера применяется посредством входных переменных тормозного момента и проскальзывания отдельных колес, корректируемых контроллерами нижнего уровня.
Стабилизирующие вмешательства выполняются на всех колесах, торможение которых генерирует момент вращения вокруг вертикальной оси в требуемом направлении вращения, и на которых еще не достигнут предел передаваемых сил. У автомобиля с избыточной поворачиваемостью физический предел сначала превышается на задней оси. Поэтому стабилизирующие вмешательства выполняются на переднем мосту. У автомобиля с недостаточной поворачиваемостью ситуация обратная.
Номинальные значения относительного скольжения λ’Nom, запрашиваемые контроллером поперечной динамики, на отдельных колесах устанавливаются с помощью контроллеров колес, т.е. контроллеров низшего уровня (см. рис. «ESP — общая система управления» ). Различают следующие три случая.
Управление колесами при движении накатом
Чтобы создавать как можно более точные величины момента вращения вокруг вертикальной оси, необходимые для стабилизации автомобиля, силы на колесах должны изменяться при определенных условиях путем контроля проскальзывания колес. Номинальная величина проскальзывания, запрашиваемая контроллером поперечной динамики на том или ином колесе в случае отсутствия торможения регулируется контроллером проскальзывания путем активного нагнетания давления. Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID- регулирования (пропорционально-интегральнодифференциального регулирования).
Номинальная величина проскальзывания, запрашиваемая контроллером поперечной динамики на том или ином колесе в случае отсутствия торможения регулируется контроллером проскальзывания путем активного нагнетания давления. Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID- регулирования (пропорционально-интегральнодифференциального регулирования).
Колесо может подвергаться торможению не только в случае активного нагнетания давления контроллером поперечной динамики. После переключения на пониженную передачу и резком отпускании педали газа инерция движущихся деталей двигателя в определенной степени тормозит приводные колеса. При увеличении этой силы и соответствующего реактивного момента сверх определенного уровня шины теряют способность передавать результирующие нагрузки на дорогу и у них появляется тенденция к блокированию (например, из-за внезапного наезда на скользкий участок дороги). Тормозное проскальзывание приводных колес можно ограничить в случае движения накатом посредством регулировки тормозного момента двигателя. Водителем это воспринимается как «плавный разгон».
Тормозное проскальзывание приводных колес можно ограничить в случае движения накатом посредством регулировки тормозного момента двигателя. Водителем это воспринимается как «плавный разгон».
Управление колесами при торможении
При торможении на отдельных колесах выполняются различные операции, в зависимости от ситуации:
- Вмешательство водителя через нажатие педали тормоза и вращение рулевого колеса;
- Эффект контроллера ABS, предотвращающего блокировку отдельных колес;
- Вмешательства контроллера поперечной динамики, обеспечивающие устойчивость автомобиля за счет подтормаживания отдельных колес, при необходимости.
Эти три требования должны координироваться таким образом, чтобы инициируемые водителем торможение и маневрирование реализовывались как можно полнее. Если управление колесами выполняется главным образом с целью максимального замедления автомобиля, то его можно выполнять на основании ускорения колес, надежно определеяемого по минимальной информации датчиков (управление неустойчивостью). Для регулировки продольных и поперечных сил на шине для стабилизации автомобиля необходимо применять принцип управления проскальзывания, так как он также позволяет управлять колесами в нестабильном диапазоне характеристики коэффициента сцепления / проскальзывания. Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Для регулировки продольных и поперечных сил на шине для стабилизации автомобиля необходимо применять принцип управления проскальзывания, так как он также позволяет управлять колесами в нестабильном диапазоне характеристики коэффициента сцепления / проскальзывания. Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Контроллер ABS
Задача контроллера ABS — обеспечить устойчивость и управляемость автомобиля в любых дорожных условиях и использование сцепления между шинами и дорогой в как можно большей степени. Будучи контроллером нижнего уровня по отношению к контроллеру поперечной динамики, он выполняет эти функции путем модулирования тормозного давления на колесе таким образом, чтобы обеспечивалась максимально возможная продольная сила при сохранении достаточной поперечной устойчивости. Однако в ESP измеряется больше переменных, чем в ABS, имеющей только датчики угловых скоростей колес. Таким образом, информация о движении колеса, такая как скорость вращения вокруг вертикальной оси или поперечное ускорение, получается путем прямого измерения с большей точностью, чем при модельной оценке на основании нескольких измеренных значений.
Таким образом, информация о движении колеса, такая как скорость вращения вокруг вертикальной оси или поперечное ускорение, получается путем прямого измерения с большей точностью, чем при модельной оценке на основании нескольких измеренных значений.
В определенных ситуациях можно повысить эффективность системы путем адаптации управления ABS посредством использования переменных из контроллера поперечной динамики. Когда автомобиль тормозит на неровной дороге (μ -разделение), на левых и правых колесах возникают очень разные тормозные силы. В результате возникает момент вращения вокруг вертикальной оси, на который водитель должен реагировать выруливанием, чтобы стабилизировать автомобиль. Скорость нарастания этого момента и быстрота последующей реакции водителя зависят от момента инерции автомобиля вокруг вертикальной оси. ABS вызывает задержку увеличения момента вращения вокруг вертикальной оси, сдерживая рост давления в колесном цилиндре переднего колеса с более высоким коэффициентом сцепления с дорожным покрытием. Эта функция ABS может также использовать информацию контроллера высшего уровня — контроллера поперечной динамики (по реакции водителя и поведению автомобиля) и, соответственно, даже еще лучше реагировать на фактическое движение автомобиля.
Эта функция ABS может также использовать информацию контроллера высшего уровня — контроллера поперечной динамики (по реакции водителя и поведению автомобиля) и, соответственно, даже еще лучше реагировать на фактическое движение автомобиля.
Если при торможении в повороте автомобиль при определенных условиях начинает поворачиваться, то тенденции к избыточной поворачиваемости можно противодействовать путем электронного распределения тормозных сил через уменьшение давления на отдельных колесах. Если этого недостаточно, то помогает контроллер поперечной динамики путем активного нагнетания давления на переднем колесе, движущемся по внешнему радиусу поворота (уменьшение поперечной силы). При недостаточной же поворачиваемости тормозной момент увеличивается на заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо не контролируется системой ABS) и слегка уменьшается на переднем внешнем колесе.
Если у автомобиля появляется тенденция к избыточной поворачиваемости при смене полосы с полным или частичным торможением, то уменьшается давление на заднем внешнем колесе (увеличение поперечной силы), и увеличивается давление на переднем внешнем колесе (уменьшение поперечной силы). При недостаточной поворачиваемости при торможении в повороте увеличивается тормозной момент в заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо еще не попало в диапазон вмешательства ABS) и слегка уменьшается на переднем внешнем колесе.
Управление колесами при активном движении
Как только приводные колеса начинают проскальзывать при активном движении, активируется контроллер низшего уровня — контроллер тягового усилия (TCS). На измеренную скорость колеса и соответствующее проскальзывания можно повлиять путем изменения баланса крутящего момента на каждом приводном колесе. Контроллер TCS ограничивает крутящий момент на каждом колесе до величины, которая может быть передана на дорогу. Таким образом, команда водителя реализуется после разгона настолько, насколько зто физически возможно, и одновременно обеспечивается фундаментальная курсовая устойчивость, так как слишком сильно уменьшаются боковые силы на колесе.
У автомобиля с активной осью в качестве регулирующих переменных используются средняя скорость колеса приводной оси.
vMWhl = 1/2 (vlWhl + vRWhl)
и разность скоростей vDif = vlWhl — vRWhl между левым vlWhl и правым vRWhl колесами.
Структура контроллера TCS изображена на рис. «Структура контроллера TCS». Опорные переменные контроллера поперечной динамики включаются в расчет номинального значения средней скорости колеса и разности скоростей колес, а также номинальных значений относительного скольжения и скоростей колес при движении накатом. При расчете номинальных значений vDifNom (номинальной разности скоростей приводных колес на одной оси) и vWhlNom (номинальной средней скорости колес), вводные переменные для изменения номинального относительного скольжения ΔλNom и допустимая разность величин относительного скольжения ΔλDlfTolNom приводной оси или осей корректируют базовые значения, вычисленные блоком TCS.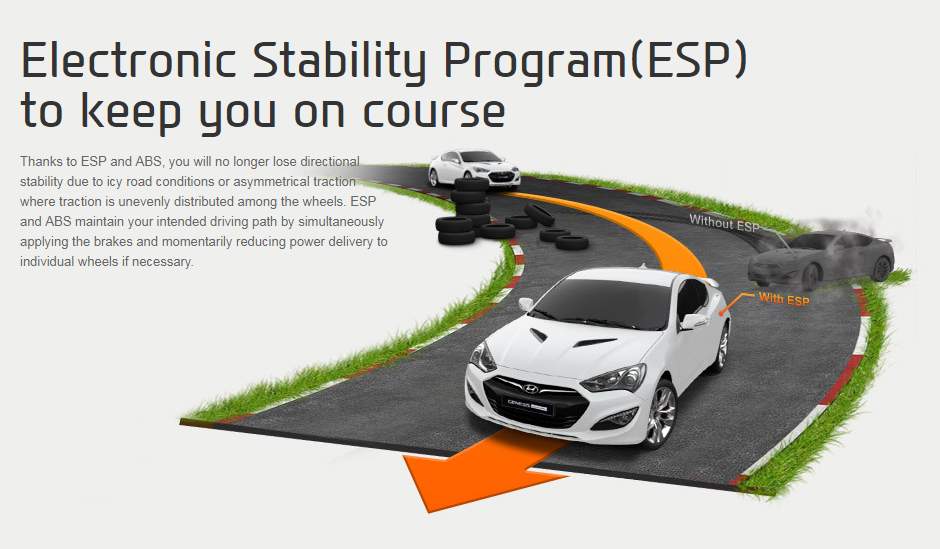 Кроме того, тенденция к недостаточной или избыточной поворачиваемости, выявляемая контроллером поперечной динамики, через приращение номинального крутящего момента двигателя ΔМRedNom напрямую влияет на определение максимально допустимого приводного момента.
Кроме того, тенденция к недостаточной или избыточной поворачиваемости, выявляемая контроллером поперечной динамики, через приращение номинального крутящего момента двигателя ΔМRedNom напрямую влияет на определение максимально допустимого приводного момента.
Динамическая реакция силового агрегата зависит от сильно изменяющихся режимов работы. Поэтому необходимо определить текущий режим работы (выбранная передача, включение сцепления), чтобы можно было адаптировать параметры контроллера к динамической реакции регулируемой системы и к не линейным характеристикам.
Поскольку на среднюю угловую скорость колеса влияют переменные инерционные силы, возникающие в приводе в целом (в двигателе, трансмиссии, на ведущих колесах, на карданном валу), то для описания её относительно медленной скорости динамической реакции используется относительно большая постоянная времени. Среднюю угловую скорость колеса контролирует нелинейный PID-контроллер, при этом, в частности, приращение l-компонента (в зависимости от режима работы) может варьироваться в широком спектре. В стационарном случае l-компонент является мерой крутящего момента, который может быть передан на колесо в точке контакта с поверхностью дороги. Выходной переменной этого контроллера является номинальный суммарный момент МMWhlNom.
И наоборот, постоянная времени для разности скоростей колес относительно мала и отражает тот факт, что собственные инерционные силы колес являются практически единственным определяющим фактором для динамической реакции. Кроме того, в отличие от средней скорости колес, двигатель влияет на неё лишь косвенно. Разность скоростей колес vDif контролируется нелинейным Pl-контроллером. Поскольку притормаживания приводного колеса вначале становятся заметными только через баланс крутящих моментов этого колеса, то они изменяют распределение межколесного дифференциала, имитируя его блокировку. Параметры этого контроллера блокировки межколесного дифференциала лишь в минимальной степени зависят от включенной передачи и влияний двигателя. Если дифференциальная скорость на приводной оси отличается от номинальной vDlfNom больше, чем это допустимо («мертвая зона»), то запускается вычисление номинального дифференциального момента MDlfNom. «Мертвая зона» расширяется, если тормозных вмешательств TCS необходимо избегать, например, при прохождении поворотов на пределах возможностей.
Номинальные дифференциальные крутящие моменты
Номинальный суммарный и номинальный дифференциальный крутящие моменты являются основой для распределения позиционирующих сил между исполнительными механизмами. Номинальный дифференциальный момент MDlfNom задается разностью между крутящими моментами на левом и правом ведущих колесах путем активации соответствующего клапана в гидравлическом блоке (ассиметричное вмешательство тормозов). Номинальный суммарный момент МMWhlNom регулируется как вмешательствами двигателя, так и симметричным вмешательством тормозов.
У бензинового двигателя регулировки, предпринимаемые через дроссельный клапан, относительно медленно дают эффект (задержка и переходная реакция двигателя). Для быстрого вмешательства через двигатель используются задержка момента зажигания и еще одна опция — селективное подавление импульсов впрыска. В дизельных двигателях электронный блок управления (EDC) уменьшает крутящий момент двигателя путем изменения количества впрыскиваемого топлива. Для краткосрочной помощи в уменьшении крутящего момента двигателя можно применять симметричное тормозное воздействие.
Во внедорожных условиях особую роль играет тяговое усилие. Обычно у внедорожников управление тяговым усилием автоматически адаптируется путем идентификации ситуации для достижения наилучших уровней эффективности и надежности. Другие автопроизводители дают водителю возможность выбрать различные регулировки, от деактивации ограничения крутящего момента двигателя до адаптации к особым состояниям дороги (лед, снег, трава, песок, снежная каша, каменистый грунт).
Дополнительные функции поперечной динамики
Описанные выше базовые функции ESP могут также включать в себя дополнительные функции поперечной динамики для особых категорий автомобилей, таких как полноприводные универсалы или внедорожники (SUV) и легкие фургоны, а также для особых требований к стабилизации автомобилей.
Расширенное управление недостаточной поворачиваемостью
Даже в нормальных условиях движения автомобиль может оказаться неспособным адекватно реагировать на вращение рулевого колеса (с образованием недостаточной поворачиваемости), если, к примеру, на повороте дорожное покрытие внезапно окажется мокрым или грязным. ESP может увеличить скорость вращения автомобиля вокруг вертикальной оси, создав дополнительный момент вращения. Это позволяет автомобилю пройти поворот с физически возможной максимальной скоростью. Ожидаемая частота вмешательств и требования к комфорту у разных типов автомобилей разные и поэтому имеются соответственно разные ступени расширения для выполнения таких тормозных вмешательств, которые влияют на поведение автомобиля при недостаточной поворачиваемости.
Если водитель захочет пройти поворот по меньшему радиусу, чем это физически возможно, то останется лишь уменьшение скорости автомобиля. Эту информацию можно считывать во время поворота в устойчивом состоянии по зависимости между радиусом поворота r, линейной скоростью автомобиля vx и скоростью вращения вокруг вертикальной оси ψ:
r = vx / ψ
Чтобы автомобиль оставался на заданной траектории, он — без применения момента вращения вокруг вертикальной оси — тормозится настолько, насколько это необходимо путем торможения всех колес (расширенное управление недостаточной поворачиваемостью, EUC).
Предотвращение опрокидывания
Легкие грузовики и другие автомобили с высоким центром тяжести, такие как внедорожники (SUV), могут перевернуться при возникновении больших поперечных сил, например, из-за резкого руления при маневрах уклонения от препятствия на сухой дороге (очень динамичные ситуации вождения) или при медленном увеличении поперечного ускорения автомобиля до критического при съезде с автострады с уменьшающимся радиусом поворота на слишком высокой скорости (почти стационарные ситуации вождения).
Существуют особые функции (функции подавления опрокидывания, RMF), выявляющие эти критические ситуации с помощью обычных датчиков ESP и стабилизирующих автомобиль путем вмешательства в работу тормозной системы и двигателя. Для обеспечения своевременного вмешательства, в дополнение к маневрирующим действиям водителя и измеренной реакции автомобиля (скорость вращения вокруг вертикальной оси и боковое ускорение), для оценки поведения автомобиля в ближайшем будущем используется прогнозирующая модель. В частности, при выявлении надвигающейся опасности опрокидывания притормаживаются два колеса на внешнем радиусе поворота. Это действие уменьшает поперечные силы на колесах и, соответственно, критическое поперечное ускорение. Управление колесами должно выполняться с таким высоким уровнем чувствительности, чтобы, несмотря на сильно колеблющиеся вертикальные силы FN, управляемость не ухудшалась из-за тенденции к блокированию отдельных колес, особенно при очень динамичных маневрах уклонения. Уменьшение скоростей колес при притормаживании отдельных колес также помогает водителю удержать автомобиль на своей полосе. В почти стационарных ситуациях движения точно выверенное уменьшение крутящего момента двигателя также не позволяет водителю спровоцировать критическую ситуацию.
Момент стабилизирующего вмешательства и его интенсивность должны быть как можно точнее адаптированы к текущему поведению автомобиля. Это поведение может значительно изменяться с нагрузкой, к примеру, в случае с легкими фургонами и внедорожниками с багажниками на крыше. Такие автомобили используют дополнительные оценочные алгоритмы, вычисляющие массу автомобиля и изменение центра тяжести, вызванное распределением нагрузки, если это требуется для адаптации функций ESP (управление с адаптацией к нагрузке, LAC).
Подавление раскачивания прицепа
В зависимости от скорости движения автомобили с прицепом подвержены раскачиванию вокруг вертикальной оси. Если автомобиль с прицепом или автопоезд движется со скоростью меньшей «критической» (обычно 90 км/ч и 130 км/ч), эти раскачивающие движения адекватно и быстро гасятся. Но если скорость оказывается выше, то небольшие повороты руля, боковой ветер или наезд на выбоину могут внезапно вызвать такие раскачивающие движения, которые быстро набирают интенсивность и в конечном счете могут привести к ДТП из-за складывания автопоезда.
Периодическая избыточная поворачиваемость вызывает стандартные стабилизирующие вмешательства ESP, но они обычно приходят поздно и сами по себе не способны стабилизировать автопоезд. Функция подавления раскачивания прицепа (TSM) своевременно выявляет раскачивающие движения на основе сигналов стандартных датчиков ESP; это делается посредством анализа скорости вращения тягача вокруг вертикальной оси на основе моделей, с учетом маневрирующих движений водителя. Когда эти раскачивающие движения достигают критического уровня, автопоезд автоматически тормозится для уменьшения скорости до такой степени, чтобы даже малейшее последующее возбуждение не вызвало немедленных критических колебаний. Чтобы как можно эффективнее погасить колебания в критической ситуации, в дополнение к симметричному торможению через все оси тягача выполняются притормаживания отдельных колес, быстро устраняющие раскачивание автопоезда. Ограничение крутящего момента двигателя предотвращает опасное ускорение автомобиля (инициируемое водителем) во время стабилизации.
Активация других исполнительных органов ESP
Наряду с использованием гидравлических колесных тормозов, предусмотрены и другие исполнительные механизмы, посредством которых можно влиять на динамику движения автомобиля. Когда активное рулевое управление и системы шасси соединяются с ESP, образуя комплексную систему- систему управления динамикой автомобиля (Vehicle Dynamics Management, VDM), они в комплексе могут даже лучше поддержать водителя, что еще больше повышает безопасность движения и динамику вождения.
В то время как сочетание системы стабилизации рулевого управления с тормозной системой появилось в последние несколько лет, системы для активации блокировки дифференциала в трансмиссии уже давно представлены на рынке. Большое количество таких систем означает, что соединение с ESP возможно во многих случаях. Дополнительный исполнительный механизм может быть активирован либо непосредственно из расширенной функции ESP (принцип взаимодействия), либо через отдельный ЭБУ, обменивающийся информацией с ЭБУ ESP (параллельный принцип).
В полноприводных автомобилях создаваемый двигателем момент распределяется между обеими осями через межосевой дифференциал (рис. «Концепция полноприводного автомобиля с ESP» ). Когда двигатель сначала приводит в действие одну ось, а другая ось соединена с двигателем через межосевой дифференциал, такая система называется зависимой. Если этот межосевой дифференциал представляет собой разомкнутый дифференциал (без блокировки), то приводной момент ограничивается при увеличении пробуксовки одной оси. В самом неблагоприятном случае при пробуксовке колеса не происходит движения вперед. В сочетании с ESP симметричные вмешательства торможением контроллера TCS на все колеса могут ограничить межосевую разность скоростей колес и тем самым добиться продольного блокирующего эффекта.
Управление тяговым усилием системы ESP может также сопоставляться с особыми принципами работы других типов межосевых дифференциалов, таких как Torsen и вязкие муфты. В принципе, все управляемые исполнительные механизмы привода должны иметь определенный блокирующий момент и динамическую реакцию при размыкании и смыкании, чтобы адаптировать к себе подруливающие свойства автомобиля.
Если привод автомобиля может быть вручную переключен в различные режимы, то ESP может автоматически подстроиться под выбранный водителем режим. Поскольку ESP базируется на индивидуальном управлении колесами, то взаимодействие с механическими блокировками дифференциала для езды по бездорожью возможно лишь при возможности автоматического размыкания блокировки дифференциала во время вмешательств контроллера поперечной динамики. В противном случае систему необходимо переключить на аварийный режим ABS, когда включена блокировка, потому что вмешательства системы динамической стабилизации на одном колесе затронут и другие колеса, если оси жестко соединены.
Блокираторы межосевого дифференциала
Наряду с простыми соединениями между двумя осями, имеются управляемые блокираторы межосевого дифференциала, в которых электрический или гидравлический исполнительный орган активирует муфту, тем самым адаптируя момент блокировки (рис. «Концепция полноприводного автомобиля с ESP» ). Таким образом, на основании информации ESP (скорости колес, скорость автомобиля, скорость вращения вокруг вертикальной оси, боковое ускорение и крутящий момент двигателя), и с учетом переменных, специфичных для исполнительного органа (таких как механическая нагрузка) можно оптимально адаптировать соотношение двух осей к текущей ситуации движения (динамический крутящий момент при межосевом распределении, DCT-C).
Пример на рис. «Влияние распределения момента привода на поведение автомобиля» показывает, как переменное распределение приводного момента влияет на поведение автомобиля. Если в случае риска избыточной поворачиваемости при прохождении поворота можно временно перебросить часть крутящего момента на переднюю ось, это необходимо делать лишь намного позже во избежание потери устойчивости, для уменьшения крутящего момента двигателя или даже стабилизации автомобиля вмешательством тормозной системы (показано максимально возможное перераспределение крутящего момента привода).
Если автомобиль имеет тенденцию к недостаточной поворачиваемости, то её можно уменьшить путем смещения крутящего момента на заднюю ось. В обоих случаях достигается улучшение реакции автомобиля и повышение устойчивости. Пределы, в которых фактически возможно смещение крутящего момента привода, зависят от конфигурации конкретного привода.
Управляемый межколесный дифференциал на одной оси может быть активирован системой ESP по аналогичным линиям к гибкому соединению двух осей. В плане принципа работы система динамического распределения крутящего момента на колеса (Dynamic Wheel Torque Distribution, DWT) отличается лишь от блокировки межколесного дифференциала, выполняемой системой TCS через гидравлические колесные тормоза.
Однако такой дополнительный исполнительный орган в обычных ситуациях также активно распределяет момент привода между колесами одной оси. Это делается с минимальными потерями и с гораздо большей чувствительностью и комфортом, чем может быть достигнуто через управление тяговым усилием в сочетании с регулированием тормозного момента и уменьшением крутящего момента двигателя, учитывая износ гидравлического блока ESP.
Компоненты программы
Гидравлический блок, непосредственно подключенный к нему ЭБУ (добавочный ЭБУ) и датчики скорости работают в сложных условиях моторного отсека и колесных арок. Датчик вращения вокруг вертикальной оси и датчик бокового ускорения либо встраиваются в ЭБУ, либо, как датчик угла поворота, устанавливаются в салоне. На рис. «Компоненты ESP» показаны примерные места установки компонентов в автомобиле с электрическими и механическими соединениями.
Электронный блок управления
ЭБУ в виде печатной платы включает в себя, как и компьютер с двухъядерным процессором, все приводы и полупроводниковые реле для активации клапанов и насосов, а также интерфейсные контуры для обработки сигналов датчиков и соответствующие коммутирующие входы для дополнительных сигналов (например, выключатель стоп-сигнала). Имеются также интерфейсы (CAN, FlexRay) для сообщения с другими системами, такими как системы управления двигателем и трансмиссией.
Гидравлический блок
Гидравлический блок (также называемый гидравлическим модулятором), как в системах ABS или ABS/TCS, образует гидравлическое соединение между главным тормозным цилиндром и рабочими цилиндрами колесных тормозов. Он преобразует управляющие команды ЭБУ и через электромагнитные клапаны регулирует давление в колесных тормозах. Гидравлический контур выполняется в виде каналов в алюминиевом блоке. Этот блок также используется для размещения необходимых элементов гидравлической функции (электромагнитных клапанов, плунжерных насосов и камер-аккумуляторов).
В системе ESP должно быть 12 клапанов независимо от конфигурации тормозных контуров (рис. «Схема гидравлического блока ESP (х-образная конфигурация тормозных контуров» ). Кроме того, обычно встраивается датчик давления, измеряющий инициируемое водителем замедление через тормозное давление в главном тормозном цилиндре. Это повышает эффективность стабилизации автомобиля при частично активных маневрах. Давление модулируется при регулировании со стороны ABS (пассивное регулирование) с помощью гидравлики ESP точно так же, как было описано для системы ABS.
Но поскольку системы ESP также должны активно нагнетать давление (активное регулирование) или повышать тормозное давление, создаваемое водителем (частично активное регулирование), используемый в ABS возвратный насос заменяется самовсасывающим насосом для каждого контура. Рабочие цилиндры тормозных механизмов колес и главный тормозной цилиндр соединяются через коммутационный клапан, открываемый при нулевом электрическом токе, и переключающий клапан высокого давления.
Дополнительный невозвратный клапан с определенным давлением закрытия предотвращает высасывание лишней тормозной жидкости из цилиндров колес. Насосы приводятся в действие электродвигателем постоянного тока в зависимости от потребностей. Двигатель вращает расположенный на его валу эксцентриковый подшипник.
На рис. «Модуляция давления в гидравлическом блоке ESP» показаны три примера модуляции давления. Чтобы нагнеталось давление независимо от водителя (рис. с), коммутационные клапаны закрываются, а переключающие клапаны высокого давления — открываются. Теперь самовсасывающий насос подает тормозную жидкость на соответствующее колесо или колёса, нагнетая давление. Впускные клапаны других колес остаются закрытыми.
Чтобы уменьшить давление, выпускные клапаны открываются, а переключающие клапаны высокого давления возвращаются в исходное положение (рис. b). Тормозная жидкость вытекает из рабочих тормозных цилиндров колес в резервуары низкого давления, опорожняемые насосами. Управление двигателем насоса, в зависимости от потребностей, уменьшает шум при нагнетании и регулировании давления.
Для частично активного управления (рис. а) переключающий клапан высокого давления должен быть способен открывать всасывающий канал насоса при высоком дифференциальном давлении (> 0,1 МПа). Первая ступень клапана открывается за счет магнитной силы катушки, находящейся под напряжением, а вторая ступень — за счет разности гидравлических площадей. Если контроллер ESP обнаружит нестабильное состояние автомобиля, то коммутирующие клапаны (открытые при нулевом электрическом токе) закрываются, а переключающий клапан высокого давления (закрытый при нулевом электрическом токе) открывается.
Затем два насоса генерируют дополнительное давление для стабилизации автомобиля. По завершении вмешательства системы открывается выпускной клапан, и тормозная жидкость из рабочего тормозного цилиндра регулируемого колеса выходит в аккумулятор. Как только водитель отпустит педаль тормоза, тормозная жидкость откачивается из аккумулятора обратно в бачок.
Система контроля
Комплексная система контроля безопасности является фундаментальной для обеспечения надежного функционирования ESP. Система контроля безопасности охватывает работу системы ESP вместе с ее компонентами и всеми другими функциональными взаимосвязями. В основе системы контроля безопасности лежат такие методы, как FMEA, FTA и исследования с моделированием неисправностей. Применяются методы по исключению ошибок, которые бы имели последствия, относящиеся к безопасности. Крупномасштабные программы контроля гарантируют надежное и точное определение всех ошибок датчиков, которые не могут быть полностью исключены. Эти программы основаны на хорошо разработанных надежных программных обеспечениях систем ABS и TCS, контролирующих все компоненты, подключенные к ЭБУ вместе с их электрическими подсоединениями. Со временем надежное программное обеспечение улучшалось более полным использованием возможностей, предоставлявшихся дополнительными датчиками и их последующим приспособлением к специальным компонентам и функциям ESP.
Работа датчиков контролируется в несколько этапов. Во время первой стадии датчики непрерывно контролируются во время управления автомобилем на обрыв проводов и вероятность прохождения сигнала (внедиапазонная проверка, определение помех, физическое правдоподобие). В течение второго этапа наиболее важные датчики проверяются отдельно. Датчик скорости вращения вокруг вертикальной оси испытывается путем преднамеренной расстройки чувствительного элемента и затем оценивается на прохождение сигнала. Даже датчик ускорения имеет внутренний фоновый контроль. При активации сигнал датчика давления должен показывать предопределенную характеристику; происходит внутренняя компенсация смещения и усиления. Датчик угла поворота рулевого колеса имеет свои собственные контрольные функции, которые непосредственно сопровождают какое-либо ошибочное сообщение, поступающее к ЭБУ. Дополнительно контролирует цифровой сигнал, постоянно передаваемый к ECU. Во время третьего этапа применяется аналитическая избыточность для контроля работы датчиков во время стационарного режима эксплуатации автомобиля. В данном случае используется модель автомобиля с целью проверить тот факт, что не имеется нарушений для определенных связей между сигналами датчиков и движением автомобиля. Эти модели также часто применяются для вычислений и компенсирования смещений датчиков, поскольку они остаются в пределах технических условий.
В случае возникновения ошибки система выключается или частично, или полностью, что зависит от типа ошибки. Реагирование системы на ошибки также зависит от того, действительно ли осуществлялось управление.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
что это такое в машине
Развитие и доводка технических способностей современного автомобиля дошли до такой степени, что человек уже не в состоянии справиться с его управлением при вождении на пределе. Необязательно в агрессивном стиле, возможны ситуации на дороге, когда автомобиль ещё мог бы избежать неприятностей, задействовав свою управляемость и динамические характеристики, но водитель уже не умеет или не успевает. Стало понятно, часть функций пора перекладывать на точную и быстродействующую программируемую электронику, в частности, ESP, что это такое в машине сейчас уже известно многим.
Этапы внедрения электронных систем помощи водителю
Развитие систем помощи водителю в разных режимах движения шло по пути усложнения и увеличения количества функций. Это связано с прогрессом компьютерных технологий, повышением быстродействия, объёмов памяти и снижением цены бортовых блоков обработки данных, датчиков и исполнительных механизмов. Параллельно отрабатывались алгоритмы работы с использованием опыта лучших водителей (автоспортсменов), заводских испытателей и полученных данных обратной связи от широкого круга сотрудников автомобильной прессы и рядовых водителей. Предусмотреть всё в лабораторных условиях тут в принципе невозможно.
Антиблокировочная система тормозов ABS, как основа всего последующего
Назначение и принцип действия ABS сейчас известны почти всем. Колесо, катящееся на грани срыва в скольжение, способно передать на кузов гораздо большую тормозную силу, чем уже сорвавшееся в юз. Но в данном случае роль ABS состояла в том, что именно она предоставила в распоряжение разработчиков автомобилей целый ряд полезных механизмов для реализации уже других функций:
- раздельные датчики вращения каждого колеса;
- гидравлические узлы, способные управлять давлением жидкости в рабочих тормозных цилиндрах;
- гидронасос и гидроаккумулятор, создающие давление в приводе тормозов независимо от нажатия педали водителем;
- управляющую электронику высокого быстродействия.
С таким набором можно было пойти дальше, что и произошло.
Контроль за тягой и управление тормозным моментом
Очень часто крутящий момент двигателя, передаваемый через трансмиссию на ведущие колёса, оказывается чрезмерным или просто ненужным. Через те же датчики ABS это можно определить, рассчитать и выдать нужную обратную связь на контроллер впрыска и зажигания. Образовавшаяся система контроля тяги, или трекшн-контроль, получила разные обозначения, наиболее часто она называется ASR. В работе новая система проявила себя достойно, машины стали гораздо устойчивей. Одновременно была решена задача стабильности и при отрицательном ускорении.
Замедляясь даже при помощи ABS, автомобиль может испытывать курсовые колебания из-за возникновения разворачивающих моментов. Оценивая подобные отклонения в комплексе, а не только по признаку максимального тормозного усилия со стороны каждого колеса, вероятно попавшего в совершенно иные условия относительно всех прочих, инженеры дополнили ABS интеллектом в распределении тормозных сил. Машины приобрели дополнительную устойчивость.
Появление ESP
Объединение функций уже известных систем с дополнением их рядом новых привело к созданию интегрированного помощника водителю в предельных ситуациях. Система курсовой устойчивости ESP (Electronic Stability Program) включает в себя несколько подсистем на основе единого набора исполнительных механизмов:
- антиблокировка тормозов;
- трекшн-контроль, противобуксовочные средства при разгоне;
- распределение тормозных усилий, стабилизация на замедлении;
- имитация блокировок дифференциалов путём подтормаживания ускоряющегося колеса;
- управление тяговым усилием двигателя;
- активное торможение в экстренной ситуации.
Кроме того, в распоряжении ESP имеются средства контроля над вращательными курсовыми ускорениями автомобиля, а также активного вмешательства в руление. Наличие векторных и угловых датчиков позволяет оценивать намерения автомобиля лишиться устойчивости в любом направлении.
Даже первые несовершенные ESP проявили себя неплохо, в частности, спасли репутацию самого маленького Мерседеса А-класса, когда оказалось, что он склонен к переворачиванию при типовой имитации объезда препятствия. У компании уже были наработки по стабилизации в старших моделях, быстро проведённая работа по внедрению ESP в штатную базовую комплектацию высокого короткобазного автомобиля скромных габаритов устранила проблему и способствовала широкому распространению системы.
Как работает ESP в различных ситуациях
Управление автомобилем возможно только тогда, когда предел сцепных свойств шин ещё не превышен. Характерной особенностью нового помощника стала способность предвидеть ситуацию и принимать профилактические меры. Система курсовой устойчивости автомобиля знает, что при соблюдении условий по продольному и поперечному ускорению под тягой или тормозными усилиями основной опасностью становятся инерционные эффекты, особенно колебательного резонансного характера. Подобные процессы достаточно легко просчитываются и парируются превентивными действиями векторного управления тягой и торможением.
Предотвращение избыточной и недостаточной поворачиваемости
При недостаточной поворачиваемости в повороте возникает снос передней оси наружу. Работа рулём в ситуации не помогает, поскольку управляемые колёса находятся на грани сцепления или уже скользят. Система ESP по данным своих датчиков заблаговременно чувствует, что автомобиль уже не в состоянии двигаться по заданной траектории и начинает вполне конкретные предупредительные действия, чтобы противостоять полной потере управляемости, когда уже ничто не поможет.
Воздействовать на передние колёса уже бесполезно, поэтому начинается подтормаживание заднего внутреннего по отношению к повороту колеса. Это способствует появлению поворачивающего момента. Одновременно уменьшается тяга, а на усилитель руля подаётся команда выставить сопротивляемость так, чтобы неопытный водитель, даже не знающий, что такое ESP в автомобиле, инстинктивно понял, что от него требуется.
При заносе, то есть начале проявления избыточной управляемости, задняя ось наоборот, начинает «обгонять» автомобиль. Тормозное усилие будет создано на наружном переднем колесе, а тяга снова уменьшена в случае заднеприводного автомобиля или добавлена на переднем приводе. Именно так бы повёл себя в заносе опытный водитель.
Стабилизация автомобиля при возникновении курсовых колебаний
Потеря курсовой устойчивости резонансного колебательного характера требует быстрой и точной опережающей реакции водителя, что начинающий выполнить не в состоянии. Электроника по приведённой выше схеме начинает действовать последовательно на парирование попеременно возникающих сносов и заносов, в результате чего автомобиль будет стабилизирован, если это ещё возможно по условиям сцепления с дорогой и выбору скорости. Сама скорость будет максимально быстро и эффективно погашена без дополнения энергии колебаний курса.
Имитация блокировки дифференциалов
В условиях бездорожья, которым можно считать любую ситуацию на пределе возможностей конкретного автомобиля и его шин, одно из колёс ведущей оси может потерять сцепление, хотя второе ещё способно создавать тягу. Свободный дифференциал всегда распределяет момент поровну между колёсами. То есть близкий к нулю момент на буксующей шине автоматически означает потерю тяги и на противоположной. Электроника это понимает, поэтому система курсовой устойчивости притормозит свободное колесо, а образовавшийся из-за этого момент на втором создаст спасительное тяговое усилие.
То же самое произойдёт не только при застревании, но и в скользком быстром повороте, когда внутреннее колесо вывешивается и теряет связь с покрытием. Момент будет переброшен на наружное, и машина успешно заправится в поворот, поскольку именно оно нагружено силами инерции.
Недостатки ESP и случаи, требующие её отключения
Наличие умной ESP может не только сделать из любого водителя умелого автоспортсмена, но в некоторых ситуациях привести к прямо противоположному эффекту — лишить опытного человека возможности проявить его навыки:
- постоянные успешные вмешательства на скользких дорогах и больших скоростях ведут к утрате навыков;
- реакции руля при подаче команд на усилитель прямо противоположны привычным, например, увеличение усилия означает, что доворачивать рулевое колесо не стоит, хотя без ESP это сигнализирует об имеющемся запасе сцепления на управляемой оси;
- некоторые автомобили при отключении или поломке ESP становятся почти неуправляемыми из-за избытка мощности и ориентации настроек ходовой части на помощь электроники;
- управляя двигателем, система не позволяет задействовать всю его тягу, даже когда это действительно могло бы помочь водителю.
Обычно предусматривается частичное или полное отключение системы. Но с набором скорости она всё равно включится и вмешается, исключением могут быть лишь машины с возможностью спортивного вождения на закрытых трассах. Иногда даже данная функция завязана на навигатор, где такие участки особо отмечены. В любом случае, понимание, ESP что это такое в машине, необходимо как для гражданского управления автомобилем с максимальной безопасностью, так и при экстремальном вождении, когда её вмешательства способны стать нежелательным фактором.
Вам также будет интересно почитать:Как системы безопасности ABS, ESP (и другие) спасают вашу жизнь
Категория: Секреты автомобилей.
За каждой из аббревиатур — система безопасности. Важно понимать, как работает «умная» электроника, но не полагаться только на нее: простые законы физики никто не отменял.
ABS — антиблокировочная система
Если водитель тормозит на машине без ABS, одно из несколько колес не смогут равномерно вращаться и заблокируются, что может привести к неуправляемому заносу. Чтобы решить проблему, изобрели Antilock Braking System — антиблокировочную систему.
Система ABS состоит из датчиков скорости (по одному на каждое колесо), механизма регуляции давления гидравлики в тормозной системе и ЭБУ. Датчики отслеживают скорость вращения каждого колеса в момент торможения. Если колеса начинают проскальзывать, система зажимает то колесо, что вращается быстрее остальных, тормозными колодками — и сразу разжимает его, чтобы замедлить.
Водитель понимает о том, что сработала ABS, по характерному «стрекотанию», а педаль тормоза в этот момент или срабатывает с сильным сопротивлением, или вовсе проваливается в пол.
Неверно думать, что цель ABS в сокращении тормозного пути.
Да, на сухой дороге автомобиль с АБС остановится на 20% пути раньше, чем авто с заблокированными колесами, на влажном асфальте разница будет еще больше. Но в то же время на рыхлом снегу тормозной путь машины с ABS будет, напротив, больше: ведущие колеса не пробуксовывают, значит, не могут «нагрести» под себя валики из снега и быстрее остановиться.
Основное преимущество системы ABS — то, что автомобиль с ней сохраняет управляемость даже при экстренном торможении. То есть можно тормозить и при этом пытаться объехать внезапно выскочившую на дорогу собаку, например.
Для имитации работы штатной ABS водители применяют прием коротких интенсивных нажатий на педаль тормоза. Такой способ помогает затормозить без блокировки колес и тоже сохранить управляемость.
Систему ABS можно отключить. Неопытным водителям делать этого не стоит.
EBD — электронная система распределения тормозных усилий
Electronic Brakeforce Distribution — основное дополнение антиблокировочной системы. Современные автомобили часто оснащают комбо ABS + EBD.
Но если ABS срабатывает, когда пробуксовка колеса уже началась, то цель EBD — не допустить этой ситуации.
Принцип работы системы такой.
По скорости вращения подшипника EBD определяет, сколько тормозного усилия нужно направить на каждое колесо, чтобы проконтролировать скорость его вращения и безопасно оттормозиться. На колеса, которые испытывают серьезные нагрузки, система направляет большее тормозное усилие, поднимая давление в гидравлической системе.
Например, водитель экстренно тормозит перед пешеходным переходом. Масса автомобиля смещается кпереди, соответственно нагрузка на колеса передней оси выше. Вот система EBD отвечает за то, чтобы тормозное усилие подавалось не одинаково по умолчанию на все колеса, а с учетом этой разницы в нагрузке. То есть в нашем примере EBD направит больше тормозных усилий на переднюю ось.
Так же происходит в повороте, когда масса автомобиля и центр тяжести смещаются в сторону, противоположную повороту, и колеса могут начать проскальзывать. В этом случае EBD на основе данных об угле поворота руля и скорости движения распределит тормозные усилия таким образом, чтобы эффективно остановить ведущие колеса справа или слева.
По такому же принципу распределения тормозных усилий система позволяет эффективно затормозить, если левая и правая сторона авто едут по разным покрытиям: когда слева асфальт, а справа заснеженная обочина, например.
ESP — система электронной стабилизации
У системы электронной стабилизации (Electronic Stability Program) много других названий. Часто ESP называют системой курсовой устойчивости. В зависимости от модели автомобиля она же может называться:
- ESC на Honda, Volvo, KIA, Hyundai
- VSC на Toyota
- DTSC на Volvo
- VSA на Honda и Acura
- VDC на Subaru, Infinity, Nissan
- DSC на Mazda, BMW, Land Rover, Jaguar
На современных автомобилях система стабилизации встречается уже в базовой комплектации, вместе с ABS. Но ее назначение совсем другое. ESP помогает водителю направлять машину по заданной траектории, предотвращая пробуксовку колес и боковое скольжение (занос).
Блок-контролер ESP постоянно обрабатывает сигналы датчиков систем ABS и ASR, анализирует скорость вращения колес и давление в тормозной системе. Сопоставляет эти данные с данными датчика положения руля и датчиками боковых ускорений.
Система ESP работает постоянно. Когда она определяет, что машина сходит с заданной водителем траектории (начинается боковое проскальзывание), она возвращает автомобиль на нужный курс путем подтормаживания одного или нескольких колес и регулировкой подачи топлива.
Как именно сработает система курсовой устойчивости, зависит от ситуации.
- При скоростном прохождении поворота, если начинается снос задней оси, ESP подает сигнал ЭБУ двигателя, уменьшая подачу топлива или вмешивается в работу ABS, притормозив внешнее переднее колесо.
- В машинах с «автоматом» ESP может понижать передачу, чтобы снизить скорость и повысить сцепление с дорогой.
Основная задача системы ESP — предотвращение неуправляемых заносов. По данным производителей, система курсовой устойчивости помогает избежать до 80% заносов. Особенно важно это для неопытных водителей.
В то же время на машинах с ESP практически невозможно почувствовать начало заноса. Так что к тому моменту, как водитель понимает, что что-то не в порядке, ситуация уже становится критичной. Поэтому некоторые владельцы принудительно отключают систему курсовой устойчивости зимой.
ASR — антипробуксовочная система
Как ясно из названия, система ASR предназначена для того, чтобы не допустить пробуксовки ведущих колес. Но работает она не при торможении, как ABS, а постоянно — при разгоне и во время движения автомобиля.
Названия антипробуксовочной системы разные у разных производителей:
- ASR на Mercedes, Volkswagen, Audi
- ASC на BMW
- A-TRAC на Toyota
- DSA на Opel
- DTC на BMW
- ETC на Range Rover
- ETS на Mercedes
- STC на Volvo
- TCS на Honda
- TRC на Toyota
Но принцип работы одинаков: ASR построена на конструктивной основе ABS и умеет электронными средствами блокировать дифференциал и управлять крутящим моментом двигателя, распределяя тягу на колеса таким образом, чтобы они не срывались в пробуксовку при разгоне и в движении автомобиля.
Датчики системы ASR отслеживают скорости вращения ведущих колес. Блок управления системой ABS/ASR определяет угловое ускорение ведущих колес, скорость и характер движения автомобиля (прямо- или криволинейное) автомобиля и передает эти данные ЭБУ двигателя.
Если система ASR определяет, что ведущие колеса начинают проскальзывать, она либо увеличивает подачу тормозной жидкости, что увеличивает давление в тормозной системе, либо вычисляет необходимый для ситуации крутящий момент и передает эти данные в ЭБУ двигателя. В результате за счет изменения положения дроссельной заслонки, пропуска впрыска или понижения передачи в машине с «автоматом», удается замедлить автомобиль, не допустить пробуксовки колес.
На внедорожниках эта же система называется EDS — «электронный дифференциал». Тут дополнительная опция: как только начинается пробуксовка, тормозные колодки прижимают колесо, что позволяет ведущим колесам эффективно «разгрести» грязь или снег.
Когда срабатывает система ASR, на приборной панели загорается контрольная лампа. Систему можно принудительно отключить.
BAS — ассистент экстренного торможения
Brake Assist System — это ассистент экстренного торможения. Другие названия этой системы — ВА, ЕВА. Принцип действия одинаков — система помогает водителю быстро затормозить до полной остановки.
BAS приходит на помощь водителям, когда в экстренной ситуации они быстро, но недостаточно интенсивно жмут на педаль тормоза.
Работает ассистент экстренного торможения так: на педали тормоза стоит датчик определения скорости нажатия. Когда система оценивает, что водитель пытается экстренно затормозить, но боится выжать педаль в пол, срабатывает гидравлический усилитель тормозной системы, который добавляет усилия нажатия педали. В результате тормозной путь сокращается.
Аналогичным образом работает DBC — система динамического контроля за торможением. С помощью DBC получается добиться эффективного экстренного торможения, даже если водитель нажал на педаль неоптимально.
Что дальше?
Технологии активной безопасности развиваются быстро.
Сегодня никого уже не удивляют автономные ассистенты, которые на основе комплекса датчиков и камер самостоятельно отслеживают дорожную обстановку, контролируют «слепые зоны», обнаруживают пешеходов, удерживают автомобиль в полосе, предупреждают об опасном сокращении дистанции и применяют автоматическое торможение в экстренной ситуации .
Парадоксальным образом ассистенты водителя, призванные повысить безопасность дорожного движения и предотвратить аварии, вызывают часто обратную реакцию: водитель слишком полагается на электронных «помощников», позволяет себе рискованные скоростные маневры.
Это чревато авариями и серьезными повреждениями автомобиля.
- Особенности разных типов привода — RWD, FWD, 4WD, AWD узнаете здесь.
Качественные запчасти для вашего автомобиля предлагает наша разборка
Перейти к поиску
Метки: устройство автомобиля
Стабилизация автомобиля | Паратех
Получить цитату ПаратехКупить по продукту
- Структурная опора
- Укладка траншей
- Стабилизация автомобиля
- Пневматические мешки
- Инструменты для принудительного проникновения
- Ударные инструменты
- Спасательные прицепы
- Высокий угол и веревка
- Морской контроль повреждений
- Курсы обучения и тактики
Магазин по отраслям
- Пожарно-спасательные
- Морской
- Карьер
- Добыча полезных ископаемых
- Железная дорога
- Трубопровод
Центр помощи
- Ресурсы и руководства
- Календарь событий
- Запросить демо
- Регистрация гарантии
- Видео Центр
- Проверка серийного номера пневмоподъемной подушки
- Авторизоваться
PPT — Презентация PowerPoint по базовой стабилизации автомобиля, скачать бесплатно
Базовая стабилизация автомобиля Система Rescue 42 TeleCrib® Strut может использоваться для быстрой и простой стабилизации транспортных средств, самолетов, механизмов и легких конструкций.В этой презентации будут рассмотрены некоторые из основных принципов безопасной стабилизации и предложены методы работы в сложных ситуациях. Позвоните или зайдите в Интернет и запросите наш бесплатный DVD-диск с инструкциями для более подробного обзора системы и стабилизации: (888) 427-3728, www.RESCUE42.com Заявление об ограничении ответственности: все методы стабилизации в этой презентации были протестированы и, как известно эффективные, однако, их следует рассматривать как руководящие принципы, поскольку может потребоваться изменить эти методы или принять новые.Не используйте какие-либо процедуры, противоречащие Стандартным рабочим процедурам вашего отдела.
Базовая система стабилизации автомобиля • — ПРЕДУПРЕЖДЕНИЯ — • Несоблюдение и несоблюдение приведенных ниже предупреждений может привести к повреждению оборудования, травмам или смерти. • Никогда не превышайте номинальную рабочую нагрузку стоек или компонентов. • Никогда не нагружайте стойку сбоку. • Никогда не используйте распорку с трещинами, порезами, потертостями, скрученными, помятыми, изогнутыми или помятыми. • Никогда не используйте распорку без концевого фитинга (основания и головки).• Никогда не используйте для подъема над головой. • Ни в коем случае не меняйте и не модифицируйте распорку или какой-либо аксессуар распорки. • Никогда не используйте булавку, не предоставленную Rescue 42, Inc. • Никогда не используйте ремешок, не предоставленный Rescue 42, Inc. • Никогда не позволяйте использовать распорки необученному персоналу. • Никогда не используйте порезанный или сильно потертый ремешок. • Никогда не вставляйте пальцы в отверстия для штифтов. • Никогда не работайте со стойками без полной защитной одежды, включая руки, голову, ступни (стальной палец) и средства защиты глаз. • Никогда не позволяйте стойке бесконтрольно входить или выходить.Всегда управляйте стойкой руками и пальцами. • Никогда не используйте распорку, выходящую за пределы упоров, при открытых индикаторах чрезмерного удлинения (оранжевая полоса). • Никогда не переносите и не поднимайте стойку без установленного штифта, предотвращающего выскальзывание внутренних труб. • Никогда не используйте стойку, если все штифты полностью вставлены в трубу и заблокированы. • Никогда не используйте для других приложений, кроме аварийных ситуаций или аварийного обучения. • Никогда не используйте, если потенциальная нагрузка неизвестна и / или может превышать допустимую нагрузку стоек.
Базовая стабилизация транспортного средства Основы стабилизации: Стабилизация заключается в остановке или предотвращении нежелательного движения. Если использовать приведенный ниже пример, пирамида с узким основанием менее устойчива, чем пирамида с широким основанием. Широкий след не позволит легко опрокинуться Узкие следы опоры легко останутся
Базовая стабилизация автомобиля Основы стабилизации: Раньше часто было проще стабилизировать автомобиль, не стоя на колесах. Поверхности старых автомобилей были плоскими и стальными.Пара клиньев обеспечивала достаточную площадь поверхности земли, чтобы автомобиль оставался устойчивым во время высадки. Новые автомобили часто имеют округлые формы кузова и сделаны из тонких стальных или пластиковых панелей, устойчивых к вмятинам, которые могут действовать как пружины, когда они катятся и отскакивают. Поскольку они больше похожи на пляжные мячи, чем на кирпичи, они имеют очень узкий след при приземлении на бок или крышу, что делает их более нестабильными. Старая машина [кирпич] Новая машина (пляжный мяч)
Базовая стабилизация автомобиля Основы стабилизации: лучший способ стабилизировать автомобиль типа «пляжный мяч» — это натянутые контрфорсы.Контрфорс — это просто опрокидывающаяся колонна (стойка), прикрепленная к автомобилю верхней частью. Затем используется натяжное устройство (ремень с храповым механизмом), чтобы подтянуть основание стойки к автомобилю. Это помогает приложить к автомобилю равномерное усилие в боковом направлении и вверх. Это обеспечивает очень широкую зону покрытия, что снижает вероятность опрокидывания транспортного средства во время эвакуации, обеспечивая безопасность как пациентов, так и спасателей.
Базовая стабилизация транспортного средства Система стабилизации TeleCrib®: распорки TeleCrib® представляют собой тройные телескопические трубы из усовершенствованного волокнистого композитного материала с регулировочными отверстиями через каждые три дюйма.У трубок есть упоры, чтобы предотвратить чрезмерное растяжение трубок и позволить пользователю просто вытащить столько стойки, сколько потребуется. Большинство комплектов TeleCrib® содержат 1, 2 или 4 длинные распорки, 1, 2 или 4 короткие распорки, несколько ремней с храповым механизмом, группу крючков, пружинное кольцо, головку винтового домкрата, А-образную головку и брезентовую сумку для аксессуаров. Стойки следует переносить с установленными основаниями и головками, но при необходимости их можно хранить в полностью сложенном положении из-за ограниченного пространства. Многочисленные аксессуары улучшают характеристики стоек.Подробное описание сборки и обслуживания стоек TeleCrib® см. В Руководстве по эксплуатации (также можно загрузить с нашего веб-сайта — www.RESCUE42.com)
Базовая стабилизация автомобиля Основы стабилизации TeleCrib®: после Прибыв на место происшествия, проанализируйте транспортное средство (а) и составьте план эвакуации пациента. Выберите длинную или короткую стойку и выдвиньте стойку так, чтобы она в конечном итоге находилась под углом 45–70 градусов к автомобилю при затяжке.Приложите к автомобилю так, чтобы комбинированная головка была надежно закреплена, либо в «V», с шипом, вбитым в металл, либо с прорезью цепи. Расположите ремень от опорной плиты к транспортному средству или к другой стойке опорной плите и затянуть немного. Повторите процесс с другой стороны автомобиля и столько раз, сколько необходимо, пока нужное количество стоек не будет на месте. Когда все стойки на месте, начинайте затягивать ремни до достижения желаемой устойчивости. Стойки могут быть затянуты на место с помощью ремня, тягового инструмента, подпорки или головки винта.
Базовая стабилизация автомобиля Возможные сценарии стабилизации: Автомобиль на колесах — Из-за увеличенного дорожного просвета у внедорожников и грузовиков традиционные ступенчатые башмаки могут быть недостаточно высокими, чтобы закрепить автомобиль на колесах. Стойки TeleCrib® можно использовать для предотвращения катания транспортного средства по уклону или, в этом случае, для поддержания устойчивости кузова транспортного средства для предотвращения скольжения при высадке.
Базовая стабилизация автомобиля Возможные сценарии стабилизации: Автомобиль на боку — 4 стойки: 2 стойки у днища автомобиля, 1 у капота и 1 у багажника.Прикрепите ремни с храповым механизмом от плиты основания к плите основания или от плиты основания к раме автомобиля. 3 распорки: 1 стойка к нижней части автомобиля с храповым ремнем от капота до багажника натянутого хотя опорной плита отверстия, 1 стойка на капоте и 1 в багажнике с трещоткой ремней прикреплена от опорной плиты к раме автомобиля.
Базовая стабилизация автомобиля Возможные сценарии стабилизации: Автомобиль на крыше — 2 распорки: под багажником или закреплены на стойке «С» (обычно «высокая сторона» из-за веса двигателя).Ratchet ремни от опорной плиты к плите основания. 4 распорки: 2 распорки под стволом, 2 под капотом или, как показано ниже, справа, в обрамлении с храповиком ремнями, соединенных с опорной плитой с опорной плитой или кадрирования транспортного средства. 1 стойка: опора под туловище с помощью цепи 3/8 ”класса 70 и ремней с храповым механизмом, обеспечивающих дополнительную стабилизацию.
Базовая стабилизация транспортного средства Возможные сценарии стабилизации: составные транспортные средства — 2 стойки: Транспортные средства сначала скрепляются вместе с помощью ремня с храповым механизмом для соединения верхней кабины с нижней кабиной.Используя технику цепного седла (следующий слайд) на высокой стороне верхней кабины, она стабилизируется, чтобы исключить проскальзывание, которое может раздавить пассажирские отсеки.
Базовая стабилизация транспортного средства Технология цепного седла TeleCrib®: в зависимости от аварии вы не сможете получить солидный балл за покупку автомобиля. Наш DVD дает пошаговые инструкции по технике седлования цепи — здесь мы рассмотрим основы: • Прорези на плоской стороне комбинированной головки надежно удерживают звено цепи 3/8 дюйма.Дилеры Rescue 42 имеют для этой цели цепь 3/8 ”x 20” класса 70 с захватными крюками на каждом конце. • Чтобы создать цепное седло, просто поместите цепь под • подвешенную часть транспортного средства (в данном случае багажник) • Вставьте звено цепи в паз для цепи на одной из стоек стойки • Удерживая цепь натянутой, поместите звено цепь в головку стойки • с другой стороны • Затяните ремень с храповым механизмом • Теперь вы полностью стабилизировали автомобиль. СОВЕТ: Чтобы цепь не «заезжала» по телу, прикрепите ремешок с храповым механизмом к каждой стороне цепи вокруг колесной арки (или другого неподвижного объекта).Этот метод также хорошо работает со стабилизацией самолетов и оборудования.
Базовая стабилизация транспортного средства Расширенные сценарии стабилизации: Транспортное средство вокруг дерева или столба — если транспортное средство движется с достаточной скоростью, оно может врезаться в неподвижный объект, например дерево или столб, или обернуться вокруг него. В этом случае высвобождение является чрезвычайно сложной задачей, потому что единственное, что удерживает транспортное средство, может потребоваться снять для доступа пациента. В этом случае распорки TeleCrib® были размещены по обе стороны от транспортного средства, чтобы зафиксировать его на месте, после чего дерево можно было удалить.Автомобиль почти полностью подвешен над землей, но стойки могут удерживать его в исходном положении, не подвергая дополнительной опасности пациента или команду.
Базовая стабилизация автомобиля Сценарии расширенной стабилизации: Автомобиль в канаве — Сложный сценарий для спасателей — автомобиль в канаве или на значительном уклоне. Следует проявлять особую осторожность, чтобы не допустить смещения или скольжения транспортного средства во время высадки. В обоих этих примерах стойки TeleCrib® использовались с обеих сторон автомобиля, а также спереди / сзади, чтобы предотвратить его дальнейшее скольжение.На нижнем снимке стойки использовались горизонтально, чтобы прижать автомобиль к стене, чтобы предотвратить боковое движение.
Базовая стабилизация автомобиля Сценарии расширенной стабилизации: Автомобиль подвешен — Транспортные средства также могут быть полностью подвешены с минимальным контактом с землей или без него. Внимательно осмотрите сцену, прежде чем приближаться к автомобилю. В примере справа три распорки использовались для фиксации автомобиля на дереве. Дополнительный ремень также можно было обвязать петлей вокруг дерева и прикрепить к раме машины.Автомобиль слева балансировал на большом камне. Стойки были использованы для стабилизации задней части автомобиля, чтобы можно было снять двери.
Базовая стабилизация автомобиля Дополнительные учебные ресурсы: ресурсы доступны на сайте www.RESCUE42.com • Настройка А-образной рамы (PowerPoint) • Уход и работа с храповым ремнем (PowerPoint) • Работа с подкосом (PowerPoint) • Настройка штатива (PowerPoint ) • Руководство пользователя TeleCrib® (PDF) • Примеры различных сценариев стабилизации на наших веб-страницах «Struts in Action» Позвоните или зайдите в Интернет, чтобы заказать бесплатный DVD-диск с инструкциями TeleCrib®: www.RESCUE42.com • (888) 427-3728
Лучшая система стабилизации — Отличные предложения по системе стабилизации от глобальных продавцов систем стабилизации
Отличные новости !!! Вы попали в нужное место для системы стабилизации. К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях.Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене.Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, так как эта лучшая система стабилизации в кратчайшие сроки станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели систему стабилизации на AliExpress. Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в системе стабилизации и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов.Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь. А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе.Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет. Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести систему стабилизации по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы. На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните лучший опыт покупок прямо здесь.
2 ступени стабилизации транспортных средств
Вы подъезжаете к месту аварии; у вас есть жертвы, а машина на боку.Вы должны немедленно принять решение относительно стабилизации.
Когда дело доходит до транспортных средств уровня I или легковых автомобилей, я остаюсь сторонником использования стабилизации для уменьшения опасности и повышения эффективности и безопасности эвакуации. Многие пожарные службы сталкиваются с серьезными проблемами на этой арене из-за нехватки ресурсов и, возможно, обучения.
Надлежащая стабилизация — одно из наиболее игнорируемых приложений на месте аварии транспортного средства.Чтобы разобраться в этом, мы разделим его на первичную и вторичную стабилизацию и сосредоточимся на автомобиле, который остановился на боку.
Первичная стабилизация включает в себя быстрые точки соприкосновения или соединения, которые обеспечивают устойчивость автомобиля на нижней стороне. Обычно для этого сначала используются деревянные или композитные клинья размером 4×4 и более крупные деревянные ступенчатые подушки или композитные клинья / клинья.
Если транспортное средство находится на плоскости со значительным уклоном или нестабильностью (например, крутой холм, овраг или мост), то в эту категорию также попадают трос, веревка или цепь, препятствующие движению транспортного средства.
Вторичная стабилизация включает дополнительную стабилизацию высоких сторон транспортного средства для достижения иммобилизации. Лучше всего это достигается с помощью распорок, которые натягиваются или прижимаются к месту с помощью ремней с храповым механизмом или цепей.
Это должно привести к тому, что транспортное средство нельзя будет толкнуть или непреднамеренно сдвинуть с места во время высадки. Эффективный план вторичной стабилизации не мешает плану высадки и позволяет намеренно поднимать или перемещать транспортное средство по мере необходимости с минимальными действиями.
Теперь, когда мы заложили основу для этого обсуждения, мы можем углубиться в особенности, относящиеся к боковым транспортным средствам.
Первичная стабилизация
Практически все легковые автомобили имеют естественный наклон в сторону крыши. Это потому, что профиль крыши уже, чем кузов. Это также связано с сопротивлением, которое шины на земле оказывают любому смещению в сторону ходовой части.
Сначала атакуйте зону повышенного риска нестабильности. Поместите клинья или подкладки перевернутой ступени на крышу между землей и крылом или панелью четверти прямо у стойки A и задней стойки (B или C в зависимости от количества стоек или дверей).
Дополнительная клин или ступенчатая подкладка может быть размещена на B или промежуточной стойке. Это приводит к заеданию в местах, удаленных от углов крыши, что открывает зону высвобождения.
Затем перейдите к стороне ходовой части автомобиля. Поместите как минимум два дополнительных клина между землей и панелью коромысла. Все эти контактные точки должны быть слегка прижаты к месту.
Избегайте забивать их домой с помощью тяжелого ударного инструмента на этом этапе, потому что груз чрезвычайно нестабилен, и мы не хотим раскачивать, опрокидывать или трясти груз и жертв.
Вытяжка как подножка
Избегайте использования переднего и заднего бамперов для установки клиньев или ступенчатых подушек, поскольку они обычно не являются структурными косметическими компонентами и не имеют сопротивления на углах.
После того, как все точки заземления будут на месте, вернитесь к стороне крыши и надавите на капот. Используйте ручной или гидравлический инструмент; не пытайтесь получить доступ к салону на этом этапе, чтобы добраться до открывания капота.
Принуждение к вытяжке выполняет две задачи. Обычно он обеспечивает доступ к батарее, чтобы мы могли обесточить машину, и действует как слабая, но в некоторой степени эффективная подставка. Открытый капот создает дополнительную боковую точку на земле, чтобы помочь противостоять опрокидывающим силам в сторону крыши.
Все это следует проводить с осторожностью, а спасатели должны сохранять бдительность и дисциплинировать положение тела.Старайтесь не становиться на колени или медленно двигаться, так как это помешает вам быстро покинуть территорию в случае опрокидывания транспортного средства.
Вторичная стабилизация
Распорки являются ключом к достижению стабилизации на верхней стороне. Ограничение усилий по стабилизации только нижней стороной никогда не приведет к хорошей стабилизации автомобиля.
Важно знать расчетную нагрузку стоек — какой вес стойка может выдержать при ее различной длине.Распорки становятся слабее по мере того, как их гладят. Знание конструкции нагрузки поможет вам безопасно выдержать нагрузку.
В последовательности поперечной стабилизации мы не поддерживаем вертикальную нагрузку. Однако эти инциденты часто приводят к подъему из-за частичного выброса с захватом головы или рук на нижней стороне транспортного средства. Как только мы поднимем автомобиль, стойки принимают на себя вертикальную нагрузку.
Держите стойку под соответствующим углом — обычно от 45 до 60 градусов по отношению к автомобилю. Углы шириной более 45 градусов обеспечивают огромную боковую поддержку, но становятся неэффективными при любой вертикальной нагрузке. Распорки, расположенные под углом более 60 градусов, обеспечивают отличную вертикальную поддержку, но не способны сопротивляться боковым силам и становятся очень нестабильными.
Изготовление V
Есть несколько основных правил при создании натяжения между опорной плитой стойки и якорем или транспортным средством.
Создайте V с помощью отдельных ремешков с храповым механизмом или цепей, где опорная пластина является точкой V, а распорка свободно делит ремни пополам. Это предотвращает основание пластины из смещаются в поперечном направлении, если он попал или если сдвигов транспортного средства.
Элементы одинарного натяжения могут быть неизбежны в зависимости от типа стойки, которую вы используете, но спасатели должны понимать опасность, присущую одной точке крепления.Знайте расчет нагрузки этих натяжных элементов и убедитесь, что они подходят и безопасны для профессиональных спасательных работ.
Убедитесь, что крюки оборудования и натяжные устройства рассчитаны на этот вид работ. Маленькие стяжные ремни из строительного магазина не помогут. Спасатели должны использовать ремни с храповым механизмом не менее 3300 фунтов или цепь класса 80 — 5/8 дюйма.
Никогда не прикрепляйте натяжные элементы к той части автомобиля, которая будет двигаться во время подъема.И всегда старайтесь прикрепить, чтобы закрепить точки крепления на транспортном средстве или закрепить предусмотренные точки крепления на опорных плитах.
Треугольник
Теперь, когда мы познакомились с основами работы со стойками, давайте применим их. В большинстве случаев оптимальным вариантом является установка трех стоек на автомобиль. Мы хотим создать треугольник с высоты птичьего полета, причем каждая стойка будет угловой точкой треугольника.
Поскольку сторона крыши по-прежнему является более опасной стороной, снимите лобовое и заднее стекло и поместите две распорки на крышу в местах стыков между стойкой A / крылом и стойкой C / панелью четверти.Разместите их под соответствующим углом и ориентацией.
Для правильной ориентации не размещайте их перпендикулярно автомобилю. Эти стойки должны разделять углы стойки A / крыла и стойки C / панели четверти. Это позволяет спасателям размещать натяжной элемент между двумя опорными плитами, не заходя в опорные плиты и не заставляя головки стоек отойти от их точек захвата.
Убедитесь, что головки имеют надежные точки контакта или захвата.Добавьте вторичные элементы натяжения к каждой базовой пластине пути приведения элементов под передним и задними бамперами и присоединения к структурному якоря. Крюк или буксирные крючки — отличные инструменты для облегчения этих приспособлений.
Хорошая точка захвата
Бамперы автомобиля уже, чем корпус, и позволяют ремешкам с храповым механизмом проскользнуть под ними при натяжении. Слегка натяните эти распорки на место.
В идеале, пока это происходит, дополнительная бригада будет заниматься полом или стороной ходовой части автомобиля с помощью одной средней стойки. Эта стойка должна быть брошена перпендикулярно автомобилю под соответствующим углом, а два натяжных элемента должны образовывать V-образную форму в направлении направляющих рамы, где они крепятся.
Эта распорка может быть немного короче поперечных распорок крыши.На цельном шасси или автомобиле с рамой и шасси верхняя направляющая рамы будет ниже, чем точки фиксации на крыше. Убедитесь, что установлена хорошая точка захвата.
Слегка натяните эту стойку. Взгляните в последний раз на автомобиль, а затем завершите натяжение стоек до тех пор, пока головки не будут закреплены и автомобиль не будет заблокирован. Не перетягивайте и случайно не поднимайте автомобиль. Это может иметь серьезные последствия.
Весь этот процесс займет всего две-три минуты.
Жертва руководит планом действий по спасению, и мы всегда должны сильно рисковать, чтобы сэкономить, но это приложение должно быть подходящим и очень необходимым для подавляющего большинства побочных решений.
| |||||||||||
BAE SYSTEMS CNIR разрабатывает мобильную систему наведения и стабилизации антенны
Используя инструменты MathWorks, BAE SYSTEMS CNIR разработала систему наведения и стабилизации антенны.Они использовали Embedded Coder ® и Simulink Real-Time ™ для реализации и тестирования работы прототипа системы в реальном времени, а также для автоматической генерации встроенного кода C для системы разработки.
«Мы создали функцию ANSI-C, представляющую весь контроллер», — говорит Хессиг. «Наши инженеры-программисты включили эту функцию в свой код, чтобы реализовать контроллер в оборудовании для разработки. Этот процесс прошел успешно. Фактически, с тех пор мы решили использовать автоматическую генерацию кода для других частей системы WIN-T.«
Физическая система управления состоит из инерциального блока GPS, двухосного пьедестала, который поддерживает антенну и управляет ею, и управляющей электроники, связывающей эти компоненты вместе.
BAE SYSTEMS CNIR использовала Simulink ® для разработки модели физической антенной системы, а также для моделирования и моделирования алгоритмов управления, которые наводят антенну. Они использовали Control System Toolbox ™ для разработки и анализа контроллера.
Они использовали Stateflow ® для разработки своих интерфейсов RS-422 для подставки антенны и инерциальной системы GPS, что позволило им реагировать на трафик 422, преобразовывать форматы данных и синхронизировать встроенное управляющее программное обеспечение и оборудование.
«Этот тип системы требует точной синхронизации между компонентами», — объясняет Сэм Назари, системный инженер BAE SYSTEMS CNIR. «Использование Stateflow для запуска частей модели позволило нам синхронизировать контроллер с инерциальной системой GPS».
Используя Simulink Coder ™, они сгенерировали код из своих моделей и использовали Simulink Real-Time для запуска кода в реальном времени на рабочей станции Dell 3 ГГц с интерфейсными модулями RS-422.
Они использовали Embedded Coder для автоматической генерации встроенного кода C для интеграции с системой.
«Сгенерированный код Embedded Coder имеет однозначное соответствие модели, включая имена сигналов и параметров», — говорит Назари.