
Автотренажеры, автосимуляторы, тренажеры вождения | ООО Партнер
Основным направлением ООО Партнер является выпуск автомобильных компьютерных тренажеров вождения. Также в сферу деятельности нашего предприятия входит разработка и производство компьютерных автотренажеров вождения грузовых автомобилей, учебных стендов, а так же программного обеспечения к ним.
В качестве программного обеспечения для тренажеров легковых автомобилей (а в скором времени и для КАМАЗа) используется новая программа «Авториал», обеспечивающая максимальную реалистичность изображения за счет высокопрофессиональной графической системы.
Получить более подробную информацию о программе «Авториал» и скачать бесплатную версию можно
здесь.Мультимедийные компьютерные стенды-тренажеры на базе реальных узлов автомобилей, созданные в ООО Партнер, имитируют возможные реальные неисправности и позволяют проводить занятия по обучению их поиска и устранения. Кроме того, наше предприятие активно занимается выполнением научно-исследовательских работ по различным направлениям.
Высокий потенциал ООО Партнер обеспечивает сильная команда программистов, творческий коллектив конструкторов, высококвалифицированные рабочие и собственное, постоянно расширяющееся производство автотренажеров. Мобильная служба гарантийного обслуживания поможет разрешить любые сложности, связанные с эксплуатацией нашей продукции.
Изделия, выпускаемые ООО Партнер, награждены золотой медалью ВВЦ, медалью выставки «Российский щит», дипломом выставки «Диверсификация и изделия двойного назначения» и дипломами других специализированных выставок.
Для чего нужны тренажеры вождения?
В последнее время все чаще можно услышать о таких технических приспособлениях как автотренажеры и автосимуляторы. Их востребованность и распространенность увеличивается вместе с ростом и популярностью автомобилей. Машины давно стали неотъемлемой частью жизни современного человека и число автомобилей на дорогах становится все больше и больше.![]() Вместе с увеличением автомобилей вождение и нахождение на дорогах становится более сложным процессом. Для решения данной проблемы разрабатываются специальные устройства, позволяющие наилучшим образом подготовить будущего водителя к различным ситуациям. Таким устройством в первую очередь является тренажер вождения, который обеспечивает отличную подготовку.
Вместе с увеличением автомобилей вождение и нахождение на дорогах становится более сложным процессом. Для решения данной проблемы разрабатываются специальные устройства, позволяющие наилучшим образом подготовить будущего водителя к различным ситуациям. Таким устройством в первую очередь является тренажер вождения, который обеспечивает отличную подготовку.
Какими бывают автотренажеры?
Автосимулятор можно встретить в большинстве школ вождения. Во многих из них данные устройства являются неотъемлемой частью учебной программы. Самыми распространенными видами тренажеров – это автотренажеры для обучения управлением легковым автомобилем. Автомобильный тренажер имеет все самое необходимое и позволяет создать ощущение реальности. Кроме тренажеров для категории «B» есть автотренажеры для категории «С». Эти автосимуляторы позволят быстрее и легче обучиться вождению грузовых автомобилей. Еще одной разновидностью тренажеров являются специальные обучающие стенды, позволяющие изучить работу различных систем автомобиля: топливной, электронной, тормозной.
Что представляет собой автосимулятор для легковых автомобилей?
Автосимулятор – техническое средство, позволяющее обеспечить эффективное обучение вождению. Тренажер позволяет воспроизвести практически все условия реального вождения. В автосимуляторе есть все что нужно для настоящего вождения: органы управления автомобилем (рулевая колонка, педали, рычаг стояночного тормоза, коробка переключения передач), регулируемое сидение, монитор, датчики органов управления и другое. Подробное описание каждой модели тренажеров вы сможете найти в разделе «Продукция» на нашем сайте.
Тренажер для обучения вождению автомобиля с высоким разрешением
Тренажеры для обучения вождению автомобиля на Alibaba.com идеально подходят для обучения вождению с использованием передовых технологий моделирования с реальными сценариями и высокой скоростью реагирования. Они очень помогают начинающим водителям, позволяя им тренироваться в безопасной среде. Также были внесены значительные улучшения в создание тренажеры для обучения вождению автомобилей с высокопроизводительными процессорами и сетевой конфигурацией с малой задержкой, чтобы обеспечить иммерсивный опыт без задержек.
Также были внесены значительные улучшения в создание тренажеры для обучения вождению автомобилей с высокопроизводительными процессорами и сетевой конфигурацией с малой задержкой, чтобы обеспечить иммерсивный опыт без задержек.Большинство Симуляторы для обучения водителей на Alibaba.com имеют несколько экранов для увеличения поля зрения. Они также поставляются со встроенными динамиками для всестороннего аудиовизуального опыта. Педали и переключатели очень отзывчивы с минимальной задержкой для эффективной и сверхбыстрой работы, что идеально подходит для профессиональная подготовка водителей автомобилей. Они также построены с использованием качественных материалов для обеспечения долгого срока службы, и большинство машин оснащено модернизируемыми системами.
Существует множество тренажеры для обучения вождению автомобиля на выбор в зависимости от различных требований. Большинство из них также оснащены регулируемыми сиденьями и педалями, чтобы обеспечить удобное положение для всех пользователей. гоночный симулятор для тренировок также можно использовать для профессиональных водителей в качестве альтернативы трек-дням. Поскольку для моделирования и искусственного интеллекта разрабатывается все больше и больше программного обеспечения, эти системы часто ориентированы на реальность со сложными деталями.
Тренажеры для обучения вождению автомобиля на Alibaba.com предлагают новейшие технологии для неопытным водителям на практике. Они также популярны в игровом сообществе из-за гонок. Симуляторы для обучения водителей пользуются огромным спросом из-за разнообразных вариантов использования, и для поставщиков на них предлагаются исключительные скидки и предложения.
Тренажер для вождения автомобиля: все за и против
Доброго времени суток всем опытным автолюбителям! Привет и тем, кто только задумывается о походе в автошколу, сегодняшняя публикация посвящается именно вам! Если быть точнее, говорить будем о современных средствах, которые помогут отточить водительский навык, а также получить долгожданную уверенность за рулем автомобиля. Ведь каждый бывалый автомобилист знает, что трусить на дороге ни в коем случае нельзя, иначе наверняка приключится что-то неладное – проверено лично! Тренажер для вождения автомобиля воссоздаст проблемные для вас ситуации, позволяя провести плодотворную тренировку. То есть, набить виртуальные шишки перед реальной игрой.
Ведь каждый бывалый автомобилист знает, что трусить на дороге ни в коем случае нельзя, иначе наверняка приключится что-то неладное – проверено лично! Тренажер для вождения автомобиля воссоздаст проблемные для вас ситуации, позволяя провести плодотворную тренировку. То есть, набить виртуальные шишки перед реальной игрой.
Несмотря на то что технология такого типа предоставляет будущему водителю практику, которая максимально соответствует реальной обстановке на проезжей части, не все оценивают ее с положительной стороны. Водители старой закалки воспринимают инновацию исключительно как видеоигру, хотя по большому счету оценить его эффективность они не в состоянии, так как во времена их молодости такими технологиями и не пахло. Молодежь же, напротив, в восторге от подобной практики, расхваливает симулятор вождения направо и налево. Какой поколение шоферов рассуждает правильно? Вот сейчас обсудим сам предмет спора, после чего, надеюсь каждый поймет кто победитель.
Устройство «виртуального автомобиля»
На первый взгляд, компьютерный тренажер – это обычный комплект атрибутов для ПК, в который входят:
- Собственно, сам компьютер;
- Три монитора — лобовое стекло;
- Руль;
- Механическая коробка передач;
- Стандартное количество педаль;
- Программное обеспечение.
Знаю, действительно очень напоминает набор молодого геймера, но не стоит вводиться в заблуждение. Автосимулятор вождения определенно поможет осознать свою роль в стремительном городском движении автотранспорта благодаря высокой детализации, которая ничем не хуже, чем у знаменитой «гонялки» Need for Speed. Более того, жители мегаполиса, могут скачать софт с картами своего региона (причем совершенно бесплатно), что значительно усилит эффект тренировки. На родных то улицах и учиться легче! Кстати, в интернете, можно найти и онлайн-версии автосимуляторов, которые значительно сэкономят время на инсталляцию.
Отличное качество картинки, просматривающейся через виртуальное лобовое стекло, с реальным расположением вещей поспособствуют скорейшему изучению существующих на яву маршрутов, где так же, как и по настоящей проезжей части можно встретить знаки дорожного движения, разметку, светофоры и конечно же, других участников движения.
Также существуют полноценные установки для обучения вождению автомобиля при использовании новейшей технологии 3D. Естественно, они значительно эффективней своих «плоских аналогов», но цена, которую ломят производители специализированного оборудования практически исключает покупку системы обычным россиянином. Однако высокая стоимость агрегата, не помешала приобрести подобный компьютерные установки многим автошколам страны и это не может не радовать, потому что уровень водительского интеллекта в нашей стране с их помощью непременно будет расти, в этом я абсолютно убежден!
Особенности тренажера для вождения
Виртуальное вождение автомобиля помогает ученику отобрать разнообразные нюансы при определенных маневрах, для этого предусмотрены тесты и задания. Пройдя их, страх перед очередным поворотом или обгоном исчезнет. Эксперты выделяют следующие преимущества виртуальных автотренажеров:
- Объемный окружающий мир: дорога (слава богу без ям), автомобили, здания – все на высшем уровне.
- Возможность регулировки интенсивности движения.
- Выбор между механической и автоматической трансмиссией.
- Подсказчик, который вооружившись официальной версией ПДД (можно найти в разделе справка), играет роль автоинспектора.
Само собой, для нас самое важное то, что после такой нереальной езды на автомобиле из монитора, собственная машина, находящаяся в гараже, осталась без единой царапины.
Что даст практика на тренажере вождения?
Если же быть серьезным, главное – полученный опыт и навыки. «Навыки?», – спросите вы. Да дорогие друзья, именно так. Наверное, самый сложный прием для новичков, коим является процесс начала движения (большинство начинающих водителей спотыкались именно на равномерном сочетании «газа» и «сцепления»), можно без проблем отточить на виртуальной машине. Оно и правильно, зачем мучить реальную! На этом автотренажер не остановится, с его помощью вы освоите:
- Устройство органов управление и правильное пользование ими.

- Движение задним ходом.
- Процедуру переключения передач.
- Разные способы торможения.
- Экзаменационные билеты из базы ГИБДД.

Другими словами, виртуальный тренажер способен выполнить эффективную подготовку будущего ученика автошколы, после которой основные манипуляции с агрегатами управления транспортным средством будут доведены до автоматизма.
В завершение хотел бы снова обратиться к опытным водителям. Товарищи «бывалые», надеюсь вы умеете признавать собственные ошибки, так как в этом случае поговорка «все новое – это хорошо забытое старое» неуместна. Вам же будущие покорители отечественных автострад, дам совет. Путешествуя по городу, относитесь со всей серьезностью к подсказкам программы, не стоит воспринимать голос издали за настоящего автоинспектора. Все предупреждения доносятся с целью обучить, а не обобрать. На этой мажорной ноте и закончим! Удачи в обучении, рады будем видеть вас на дорогах родной для нас всех страны!
С уважением, Максим Марков!
Автотренажер обучения вождения автомобилем в Коломне
Современные технологии позволяют обучаться и повышать свои навыки не только на настоящем автомобиле. Тренажёры в автошколе – это устройство, помогающее водителям познать суть езды на авто за короткое время. Если процесс вождения для вас слишком сложный, то предлагаем выбрать именно эту услугу.
Что такое
автотренажёр
Оборудование данной системы имеет всё необходимое, для импровизации езды на авто:
- Рулевое колесо.
- Панель приборов, спидометр с другими индикаторами.
- Рычаг переключения передач и ручник.
- Рычажки поворотников, стеклоочистители.
- Педали.
Тренажёр имеет вид реальной кабины автомобиля. Обучать правильной езде на автомобиле вас будут один или несколько экранов, на котором включён симулятор автовождения. В программе имеются несколько режимов местности и можно включать
В программе имеются несколько режимов местности и можно включать
Особенности автотренажера
Большинство людей в автошколе используют симулятор легкового авто. Однако инструктаж на автотренажёрах можно проводить на нескольких видах транспорта. Это связанно с большим спросом повышения квалификации водителей различных категорий. Виды тренажёров можно разделить на:
- Легковые автомобили. Новичкам сложно управлять средством передвижения, поэтому данный вариант подходит для начинающих курсантов. Реалистичные условия городской среды позволят понять все нюансы вождения.
- Грузовые автомобили. Симуляторы КАМАЗа позволят изучить ключевые моменты обращения с транспортом грузового назначения.
- Также существуют разнообразные стенды, на которых студенты автошкол изучают информацию о правилах дорожного движения.
Во время передвижения у вас есть возможность представлять условия реального автомобиля. Вы заводите с помощью ключа зажигания, трогаетесь, используя коробку передач, и сочетаете педали для передвижения. Кроме того, во время поворотов необходимо применять специальные рычаги. А при условиях дождя – стеклоочистители.
Выбор местности позволит научиться вождению как на маленьких скоростях при условиях интенсивного переключения передач, так и при высокой скорости на трассе.
У обучения нет ограничений, и вы можете брать любое количество занятий, пока не достигните нужного результата.
Заключение
Тренажёр автошколы – отличное и удобное средство, позволяющее без особых усилий познать суть вождения.
Профессиональные преподаватели и низкая стоимость обучения являются плюсами в выборе данной услуги. Кроме этого, при окончании всех занятий вы получите соответствующую справку о вашем обучении.
Реально ли пройти обучение вождению автомобиля на симуляторе онлайн и научиться ездить на дорогах?
Доброго времени суток, уважаемые начинающие водители! Тех, кто подумал о том, что в этом материале мы будем презентовать лучшие и актуальные симуляторы или тренажеры вождения автомобиля онлайн, будут разочарованы.
У нас стоит совершенно другая задача: рассмотреть особенности обучения вождению онлайн с использованием достижений прогресса: 3D симулятор вождения автомобиля и тренажер онлайн.
Хотя, зачем лукавить? Это только так принято говорить, — обучение вождению онлайн. Ведь на самом деле, любой из вас, либо приобретает лицензионную программу симулятор вождения автомобиля, либо может легко скачать любой симулятор или тренажер. Но, это уже дело техники.
Чем может помочь начинающему водителю, электронная программа вождения автомобиля
3D Инструктор и рульНачинающие водители, относящиеся к молодому поколению, выросшему вместе с новыми технологиями, задают вопрос, — а можно ли пройти обучение вождению автомобиля онлайн, и при этом стать хорошим водителем.
Вопрос риторический, и однозначного ответа на него быть не может. Почему? Скорее всего, потому, что каждый человек обладает индивидуальным восприятием, и поэтому то, что для одного водителя является понятным, как дважды два, другой начинающий водитель воспринимает как задачу с тремя неизвестными.
Многие водители старого поколения, считают, что обучение вождению автомобиля онлайн, равносильно обучению техники плавания «на пальцах», без воды и практических тренировок.
Но, ведь никто и не берется утверждать о том, что установив на компьютер 3d стимулятор вождения автомобиля, вы уже завтра станете профессиональным водителем. Самое главное, это должны понимать те новички, которые тренируются на стимуляторах и тренажерах вождения автомобиля.
А для чего тогда они: виртуальные программы вождения автомобиля?
А давайте поймем, что любой симулятор вождения авто – это как курс молодого бойца для начинающего водителя, или, если хотите средство для психологической подготовки перед реальным выездом «на большую дорогу». И недооценивать вождение автомобиля для начинающих онлайн, не стоит.
И недооценивать вождение автомобиля для начинающих онлайн, не стоит.
Самое главное, как утверждают и психологи, и автоинструктора, да и сами начинающие водители, симулятор вождения устраняет неуверенность и страх вождения автомобиля, тем, что реально воспроизводит дорожную обстановку. Особенно это стало доступно с появлением 3D симуляторов.
Какие возможности у симулятора вождения:
- Реальное, трехмерное отображение дорожной обстановки. А сегодня уже существуют и реальные отображения определенных городов с их: дорогами, перекрестками, светофорами, дорожными знаками и привычным для вас миром. Это крайне важно для того, чтобы выработать динамический стереотип вождения именно по тем улицам, по которым вы будете двигаться в реальной жизни.
- Симуляторы вождения дают возможность водителю настраивать интенсивность движения в зависимости от навыков обучаемого. Это может быть как совершенная свободная от движения улица, так и сложная обстановка в условиях «пробки».
- Возможность симулировать управление разными моделями автомобилей.
- В симулятор уже встроена программа электронного контроля за соблюдением ПДД. Это своеобразный виртуальный гаишник.
- Электронный справочник программы о ПДД, является официальной на сегодняшний день версией ПДД.
Это речь шла о программе симулятор вождения автомобиля.
Как сделать из компьютерной программы, тренажер вождения автомобиля
И в этом случае разработчики подумали о начинающих водителях. Ведь вождение автомобиля при помощи мышки и клавиатуры, вряд ли будет полезным для вас, даже наоборот.
То есть нужен, как минимум руль и педали для того, чтобы приблизить действия симулятора к реальному вождению – сделать именно практический тренажер вождения авто.
Поэтому, программа симулятор имеет возможность подключения к вашему компьютеру рулевого управления и педалей. В этом случае, начинающий водитель может совершенствовать свои навыки вождения, доводя их до автоматизма в различных дорожных условиях.
Естественно, обучение вождению на стимуляторе – тренажере, должно сочетаться в комплексе с управлением реальным автомобилем в реальной дорожной обстановке. По другому не бывает.
А относительно высказываний скептиков о том, что обучение вождению на симуляторе – это модные взрослые игрушки, хотим информировать. Симуляторы использовались и продолжают использоваться не только для автошкол.
Уже в 70-х годах прошлого века симуляторы вождения автомобилей и боевой техники активно применялись для обучения механиков-водителей и летчиков. И, поверьте, неплохо использовались.
Поэтому, совет начинающим водителям: если у вас есть такая возможность, то для наработки навыков, используйте симуляторы, наряду с практическим вождением в городских условиях. Вы увидите, как будет повышаться ваше мастерство.
При этом, не забывайте внимательно видеть и анализировать те нарушения ПДД, о которых вам будет говорить симулятор вождения. Он же программа, то есть его нельзя подкупить, и он не придумывает нарушения, а указывает на них. А ваша задача стараться анализировать и не допускать нарушений в реальной жизни.
Удачи вам при обучении вождению на симуляторе, и хорошей реальной дороги.
Лучшие симуляторы вождения автомобиля на ПК
Симуляторы вождения автомобиля, годящиеся в качестве полноценных виртуальных тренажеров для изучения ПДД или освоения всех премудростей управления настоящим легковым автомобилем.
В этом материале вы найдете не просто реалистичные симуляторы вождения автомобиля для ПК, а интерактивные учебные пособия и достоверные тренажеры, после которых можно спокойно садиться за руль настоящего авто. Игр в топе оказалось немного, поскольку в этот раз наиважнейшим критерием отбора стали реалистичность и достоверность процесса вождения. Правда, касается это исключительно физической модели и системы контроля следования ПДД – визуально многие игры из списка звезд с неба не хватают, но в этом есть свой плюс, ведь их можно использовать даже для слабых ПК.
Правда, касается это исключительно физической модели и системы контроля следования ПДД – визуально многие игры из списка звезд с неба не хватают, но в этом есть свой плюс, ведь их можно использовать даже для слабых ПК.
Примечание: чтобы добиться образовательного эффекта (научится водить), а также для полного погружения в образ водителя легковушки, настоятельно рекомендуется воспользоваться специальными игровыми манипуляторами в виде компьютерного руля с педалями.
City Car Driving
Один из самых известных и, наверное, лучших симуляторов вождения среди всех доступных в настоящий момент на ПК. Последняя официальная версия игры City Car Driving вышла в 2016 году, и позволяет игроку с головой окунуться в процесс вождения автомобиля по хитросплетенным дорогам с обилием дорожных знаков, запутанной дорожной разметкой и бурным дорожным трафиком, безжалостным к невнимательному и неосторожному водителю.
Есть здесь и непредсказуемые пешеходы, динамично меняющаяся погода и время суток, а также сложные задания, которые можно встретить в настоящих автошколах. Все это добавляет игре реализма и сложности, превращая City Car Driving в настоящего виртуального наставника для начинающего водителя. Кстати, игроку предоставляется доступ сразу к 9 различным автомобилям с достоверной физикой и даже видимыми повреждениями от столкновений. Разработчики City Car Driving уверяют, что их игра определенно поможет подготовиться к экзамену ГИБДД, а также пройти курс контраварийной подготовки и экстремального вождения.
Купить
My Summer Car
Действие игры разворачивается в небольшой финской деревушке в конце 90-х. Главный герой мечтает собрать собственное гоночное авто, чтобы поучаствовать в раллийном заезде, а вести парня к мечте предстоит вам. My Summer Car — реалистичный симулятор не только вождения, но и ремонта, сборки и тюнинга автомобиля. Игрокам предстоит вручную перебирать запчасти, ремонтировать и обкатывать машину на десятках километров дорог с реалистичным трафиком. Полезный опыт для потенциальных обладателей бюджетных транспортных средств.
Полезный опыт для потенциальных обладателей бюджетных транспортных средств.
Купить
Snowrunner
Серия Sprinties являет собой правдоподобный симулятор перевозок габаритных заказов в условиях полнейшего бездорожья, однако автопарк в игре полнится отнюдь не одними лишь большегрузами. В Snowrunner легковые автомобили используются в качестве проворных скаутов для разведки местности, поиска разбросанных по карте запчастей, ремонта и дозаправки грузовых машин. Пользователям предстоит познать все тяжбы управления легковушками на пересеченной местности, прочувствовать их поведение на горных маршрутах, размытых или заснеженных дорогах.
Купить
LIVE FOR SPEED
Один из самых достоверных гоночных симуляторов, главная фишка которого — высокореалистичная физика поведения авто, достигнутая при помощи моделирования транспортных средств по правилам механики, основанной на законах Ньютона. Во время столкновений машины получают соответствующие характеру удара повреждения, естественно ведут себя во время заносов, а температура шин меняется в зависимости от участка дороги. Для заинтересованных доступны ознакомительная версия и платная, включающая десятки трасс, 20 автомобилей и несколько режимов игры.
Сайт игры
3D Инструктор (Учебный автосимулятор)
Учебный симулятор от компании Multisoft, призванный дать пользователям базовые знания по вождению легкового автомобиля в условиях городской среды. К услугам игрока целый открытый город, состоящий из восьми районов, на улицах которого осуществляется плотное движение общественного и частного транспорта с учетом всех правил и нюансов. Здесь же есть и виртуальный автодром, на котором можно попробовать сдать своеобразный экзамен ГИБДД.
Игра, кстати, вышла еще в 2012 году, и за это время народные умельцы успели создать для нее огромное количество различных модов и дополнений, скачать которые можно бесплатно. Они добавляют новый транспорт, районы и даже целые города, улучшают графику, увеличивают количество настроек и открывают в игре много новых, интересных и полезных возможностей.
Где купить: в официальных цифровых сервисах найти игру не удалось.
ПДД. Учебное пособие для автошкол. Вождение
Название приложения говорит само за себя – это лицензированный и одобренный ГИБДД практический курс в формате реалистичного компьютерного автосимулятора, позволяющий начинающим водителям попрактиковаться в вождении машины в комфортных домашних условиях за личным ПК. Дабы после более уверенно чувствовать себя за рулем реального транспорта.
Для этого в «ПДД. Учебное пособие для автошкол. Вождение» есть все: реалистичная физическая модель CarX, интерактивные регулируемые зеркала, говорящий инструктор, город со знаками, разметкой и другими автомобилями, площадка для отработки подъема, спуска, парковки и так далее. В общем, все, за исключением графики, в этом приложении выполнено на «отлично» и однозначно поможет пользователю стать в будущем отличным водителем.
Где купить: в официальных цифровых сервисах найти игру не удалось.
Автобан
Созданный на базе 3D инструктора автосимулятор от Мультисофт, который, в отличие от своего прародителя, предоставит игрокам свободу испытать свои рефлексы в реалистичных дорожных условиях на высоких скоростях. Проект не предъявит претензий к вашим познаниям в области ПДД, но проверит, насколько вы уверенно чувствуете себя за рулем, способны ли быстро ориентироваться в изменчивом трафике и избегать аварийных ситуаций. Воспринимать игру как пособие, конечно, не стоит, однако ситуации бывают разные, а лишним навык уж точно не будет.
Где купить: в официальных цифровых сервисах найти игру не удалось.
Обучение вождению на тренажереАвтошкола водитель ABC
Прошло две недели обучения вождению на автотренажере, можно подвести предварительные итоги. Первое – это не игрушка, как некоторые думают. Это не руль с телевизором для гонок. Некоторые родители так думали до тех пор, пока не увидели тренажер в действии. Автотренажер – это сложная электронно-вычислительная машина. Ее создатели ставили перед собой задачу создать симулятор, который полностью бы моделировал управление реальным классическим автомобилем, что им удалось. Автотренажер предназначен для развития первоначальных навыков по управлению автомобилем. Отработка упражнений по вождению автомобиля в различных дорожных и погодных условиях. Вождение по загородным дорогам, а также в условиях городского движения. Кроме того, тренажер помогает развивать психофизиологические качества водителя, такие как внимание, время реакции. Качества, помогающие водителю предвидеть развитие критических ситуаций. Учит будущих водителей безаварийной езде и умению не попадать в ДТП.
Автотренажер – это сложная электронно-вычислительная машина. Ее создатели ставили перед собой задачу создать симулятор, который полностью бы моделировал управление реальным классическим автомобилем, что им удалось. Автотренажер предназначен для развития первоначальных навыков по управлению автомобилем. Отработка упражнений по вождению автомобиля в различных дорожных и погодных условиях. Вождение по загородным дорогам, а также в условиях городского движения. Кроме того, тренажер помогает развивать психофизиологические качества водителя, такие как внимание, время реакции. Качества, помогающие водителю предвидеть развитие критических ситуаций. Учит будущих водителей безаварийной езде и умению не попадать в ДТП.
Остановимся на последнем: тренажер учит распределению внимания, как правильно пользоваться зеркалами заднего вида, как учитывать «мертвые зоны». при управлении учащемуся необходимо быть внимательным и собранным.
Задачи специально усложнены и требуют эмоциональной нагрузки. С непривычки ученики даже немного устают, но в этом есть свой плюс. У учеников развивается автомобильное мышление. На учебном автомобиле от попадания в критическую ситуацию курсанта оберегает мастер, он полностью контролирует дорожную обстановку, оно и понятно, кому хочется попадать в аварию. Поэтому ученик находится в «тепличных» условиях все его ошибки «на корню» пресекаются инструктором.
Он даже может полностью бросить управление, автомобиль все равно будет управляемым, ведь функцию автопилота выполняет мастер. В этом ошибка многих мастеров – излишняя опека расслабляет ученика, и он не учится мыслить самостоятельно.
На тренажере курсант сразу попадает в сложные условия, потому что мастер дает ему максимум самостоятельности, и поэтому он может попасть в критические обстоятельства и даже в ДТП. Это многим не нравиться, никому не хочется признавать свои ошибки. На машине он был «асс», а тут ему указывают, что еще нужно учиться и учиться. Но для того Вы и пришли учиться! Делайте ошибки на тренажере, учитесь, анализируйте причины почему это произошло, ведь на дороге учиться будет поздно. Возьмите космонавтов: они месяцами отрабатывают приемы управления на тренажерах, изучают вводные, потому что в космосе будет поздно. Вы скажете, куда хватил, космос и дорога – вот это пренебрежение, несерьезность, которая, к сожалению, заложена у многих будущих водителей, приводит к печальным последствиям на дорогах.
Но для того Вы и пришли учиться! Делайте ошибки на тренажере, учитесь, анализируйте причины почему это произошло, ведь на дороге учиться будет поздно. Возьмите космонавтов: они месяцами отрабатывают приемы управления на тренажерах, изучают вводные, потому что в космосе будет поздно. Вы скажете, куда хватил, космос и дорога – вот это пренебрежение, несерьезность, которая, к сожалению, заложена у многих будущих водителей, приводит к печальным последствиям на дорогах.
Задания и упражнения, которые можно отрабатывать на тренажере.
1-Знакомство с машиной, общее ознакомление с органами управления, контрольно-измерительными приборами. Посадка в автомобиль, отработка положения рук на рулевом колесе. Регулировка положения сиденья, пристегивание ремнем безопасности, пуск двигателя. Подача предупредительных сигналов, пользование осветительными приборами.
2-Приемы руления. Упражнения по работе с педалями (выполняется на стоящей машине).
Практическое вождение на площадке выполнение фигуры «змейка»
3-Переключение передач. Разгон, движение по прямой с переключением передач в восходящем порядке, переход на низшую передачу. Способы торможения.
4-Движение передним ходом по кольцевому маршруту, разгон и торможение с остановками, трогание с места. Остановка и трогание на подъеме.
5-Остановка в заданном месте, развороты.
6-Маневрирование в ограниченных проездах, сложное маневрирование.
7-Вождение по маршруту с малой интенсивностью движения.
8-Вождение по маршруту с большой интенсивностью движения.
9-Контрольное занятие на автодроме.
10-Контрольное занятие в условиях реального времени.
11-Контроль ПДД. Каждое нарушение не только фиксируется, но выводится на экран в виде информационного сообщения, сообщение сопровождается звуковым сигналом для привлечения внимания водителя. Все нарушения фиксируются в банке данных , даже считается сумма штрафов. Которые бы заплатил водитель, в реальной жизни. Курсанты могут соревноваться между собой кто ездит безопаснее и получил меньше штрафов, состязательный эффект помогает в учебе.
Курсанты могут соревноваться между собой кто ездит безопаснее и получил меньше штрафов, состязательный эффект помогает в учебе.
Тренажер прекрасно дополняет обучение будущего водителя и польза от него бесспорна. Новое всегда необычно и для тех, кто привык мыслить по старинке, но веление времени берет свое. Идите в ногу со временем вместе с нами, учитесь на современных автомобилях, это автомобили, которые изобретены и собраны в наше время, а не в начале 90-х годов. Наши ученики учатся на автомобилях, которые они потом могут приобрести в автосалонах, это реалии нашего времени, кто этого не понимает, тот сильно заблуждается. Приходите учиться в автошколу АВС, мы ждем Вас. Успехов Вам и удачи заходите на наш сайт, вы там найдете много интересного и полезного для Вас.
10,191 просмотров всего, 2 просмотров сегодня
Так же интересное для вас!
Симулятор вождения автомобиля — В Top Gear
Основанная в 2005 году, компания VI-grade имеет штаб-квартиру в Германии, но вся разработка продукции происходит в Италии. Здесь контакт с Компания Brüel & Kjr была основана в 2013 году с общим клиентом — Ferrari
.
Преодолевая разрыв между тестированием и моделированием, компания VI-grade недавно запатентовала инновационную платформу Driver-in-Motion (DiM ™). Это революционный дизайн с кабиной, построенной на девяти гидравлических приводах, чтобы имитировать опыт вождения реального транспортного средства.
Девять приводов обеспечивают большое рабочее пространство для моделирования и позволяют изучать низкочастотную динамику транспортного средства и высокочастотную езду на одной и той же подвижной платформе.
Тестирование качества звука NVH
Компания Ferrari установила симулятор NVH компании Brüel & Kjær, чтобы быстро и с минимальными затратами достичь целевых показателей уровня шума двигателя. В это время компания VI-grade также внедряла симулятор вождения в испытательной лаборатории Ferrari, чтобы имитировать опыт вождения нового автомобиля. Используя цилиндрический широкоформатный экран для визуального моделирования гоночной трассы и движущуюся платформу вместе с симулятором NVH для обеспечения полностью точного звука, испытатели Ferrari могли испытать и оценить управляемость и звук автомобиля вместе — в очень аутентичном контексте.
Используя цилиндрический широкоформатный экран для визуального моделирования гоночной трассы и движущуюся платформу вместе с симулятором NVH для обеспечения полностью точного звука, испытатели Ferrari могли испытать и оценить управляемость и звук автомобиля вместе — в очень аутентичном контексте.
СИМУЛЯТОР NVH
Гвидо Байрати, управляющий директор VI-grade, Италия, объясняет: «Мы поняли, что у VI-grade есть технология, которой мы можем поделиться с Brüel & Kjr и наоборот. Мы увидели, что наш опыт, оборудование и знания могут дополнять друг друга. Идея заключалась в том, чтобы улучшить качество звука на DiM ™, и мы начали вместе говорить, чтобы это произошло.
«В результате теперь технология симулятора NVH является неотъемлемой частью платформы DiM ™, предлагая клиентам симулятор, который включает в себя низкочастотную динамику транспортного средства с улучшенным звуком, а также кабины с высокой точностью воспроизведения, в которых водитель может подвергаться воздействию высокие частоты.
«Теперь звук в виртуальном автомобиле улучшен, обеспечивая высочайшую точность воспроизведения», — поясняет Гвидо Байрати. «Звук играет такую важную роль в симуляторе вождения, потому что он повышает реализм и обеспечивает улучшенное и реалистичное вождение в целом. Цель состоит в том, чтобы воспроизвести точное звучание вождения, максимально приближенное к реальности ».
Моделирование сложных конструкций NVH
В усовершенствованной кабине VI-grade также была включена технология вибрации в виде вибрационных шейкеров и приводов от Brüel & Kjr, чтобы обеспечить более точное управление автомобилем.
Симулятор NVH позволяет группам проектирования и разработки транспортных средств использовать данные о предпочтениях и удовлетворенности клиентов, устанавливать точные целевые значения NVH, проектировать с учетом специфики конкурентов и эффективно работать со всеми данными NVH на протяжении всего процесса разработки.
Компания VI-grade разработала точную динамическую модель транспортного средства в реальном времени, в которой ключевые параметры, такие как пружины, амортизаторы и шины, могут быть легко изменены, что позволяет водителям-испытателям опробовать новые конфигурации на одном и том же участке трассы.Значительная экономия времени и денег может быть достигнута, если не нужно тестировать физические прототипы. Платформа DiM ™ позволяет производителям тестировать автомобили на смоделированных испытательных треках с лабораторной последовательностью, используя как треки, ориентированные на клиента, так и библиотеку заранее определенных треков.
«Теперь звук в виртуальном автомобиле улучшен, обеспечивая высочайшую точность воспроизведения».
Гвидо Байрати — управляющий, VI класс
Таким образом, интегрированная платформа DiM ™ помогает решать проблемы на ранних этапах цикла проектирования, позволяя тестировать несколько различных конфигураций за один день и позволяя водителям слышать, как различные конфигурации влияют на звучание автомобиля.
Моделирование столкновения
В реальной жизни может быть сложно воспроизвести и протестировать ситуации, когда автомобиль взаимодействует с другими транспортными средствами, например, при парковке, смене полосы движения, экстренном торможении или реакции на внезапные маневры.
Однако в безопасной виртуальной среде эти ситуации можно проверять контролируемым образом, много раз в день. Важно, чтобы впечатления от вождения были максимально реалистичными, особенно для тестов, которые слишком опасны для выполнения вживую, например, имитация столкновения или прокола на высокой скорости, чтобы увидеть, как отреагирует водитель.В таких ситуациях реалистичное моделирование может оказаться неоценимым для облегчения разработки систем, помогающих водителю безопасно остановить автомобиль.
Уникальный симулятор звука и вибрации
«Наличие решения Brüel & Kjr в качестве интегрированной части нашей платформы DiM ™ является уникальным на рынке и положительно отличает нас», — объясняет Гвидо Байрати.
«Мы единственный симулятор вождения, предлагающий такие высокие частоты и такой широкий диапазон частотных решений. Тот факт, что DiM ™ оснащен уникальной технологией звука и вибрации, делает его полностью интегрированным решением для клиентов в процессе их проектирования.В сегодняшней конкурентной деловой среде очень важно работать с надежными партнерами, которые позволяют нам предлагать полный ассортимент продукции и широкий спектр знаний.
«В апреле 2016 года Brüel & Kjr заключила партнерское соглашение с VI-grade, которое позволяет VI-grade продвигать и продавать программное обеспечение SimSound ™ и услуги поддержки как неотъемлемую часть решения DiM ™.
«Все наши клиенты, занимающиеся автопромом и автоспортом, очень положительно отзываются о нашем партнерстве с Brüel & Kjr», — говорит Гвидо Байрати.
«Они подтвердили нам, что это интегрированное решение уточняет и расширяет систему, значительно увеличивая ценность для них, обеспечивая превосходные впечатления от вождения при одновременном расширении диапазона возможных применений. Этот подход уже оказался успешным, поскольку недавно две крупные автомобильные компании приобрели симуляторы DiM в сочетании с технологией SimSound ».
Каждый должен научиться водить машину на тренажере
Уроженец Джорджии Люк Пай, 18 лет, ехал со своей школьной девушкой по шоссе, когда его остановил фургон.Он отреагировал, повернув колесо в сторону ограждения, избегая окружающих машин и встречного транспорта.
В тот день ситуация могла обернуться по-разному. Пара могла быть среди более чем 41 000 человек, погибших в автокатастрофах в США в 2007 году. Вместо этого они ушли с парой синяков. Сегодня они женаты, у них есть четырехмесячный сын.
Пай приписывает свою удачу во многом симулятору вождения.«Вождение на тренажере в моей средней школе научило меня сохранять спокойствие и ясно мыслить в стрессовых ситуациях», — говорит он.
Большинство школ по всей стране не преподают какое-либо обучение вождению, но те, которые делают это, преподают его на основе модели, существующей несколько десятилетий назад. Один человек из Грузии пытается это изменить уже более десяти лет. После смерти 17-летнего сына Алана Брауна Джошуа в июле 2003 года он спроектировал и лоббировал закон, известный как «Закон Джошуа».Сын Брауна, Джошуа Браун, управлял гидропланом на шоссе под дождем со скоростью 40 миль в час и врезался в дерево. «Практически ничего» не было предложено для того, чтобы помочь его сыну справляться с подобными условиями вождения, — говорит старший Браун, председатель Фонда Джошуа Брауна. «С помощью моделирования подростки могут снова и снова сталкиваться с одним и тем же сбоем, пока они не будут точно знать, что делать». В случае Джошуа Брауна такое обучение могло означать, что нельзя идти со скоростью 40 миль в час в сильный дождь. В случае Пая это было обучение управлению заносом и тому, как быстро маневрировать рулевым колесом, когда что-то идет не так.
Один человек из Грузии пытается это изменить уже более десяти лет. После смерти 17-летнего сына Алана Брауна Джошуа в июле 2003 года он спроектировал и лоббировал закон, известный как «Закон Джошуа».Сын Брауна, Джошуа Браун, управлял гидропланом на шоссе под дождем со скоростью 40 миль в час и врезался в дерево. «Практически ничего» не было предложено для того, чтобы помочь его сыну справляться с подобными условиями вождения, — говорит старший Браун, председатель Фонда Джошуа Брауна. «С помощью моделирования подростки могут снова и снова сталкиваться с одним и тем же сбоем, пока они не будут точно знать, что делать». В случае Джошуа Брауна такое обучение могло означать, что нельзя идти со скоростью 40 миль в час в сильный дождь. В случае Пая это было обучение управлению заносом и тому, как быстро маневрировать рулевым колесом, когда что-то идет не так.
После смерти сына и введения в действие Закона Джошуа в 2005 году в Джорджии Браун разместил шесть симуляторов вождения в средней школе Картерсвилля, которую посещал Пай, и которая стала первой средней школой в штате, которая их получила. Сегодня в средних школах штата установлены тысячи тренажеров.
Виртуальный драйвер, интерактивный / VDI
До принятия Закона Джошуа в средних школах Джорджии не преподавали водительские права, говорит Браун.Из 416 средних школ Джорджии в то время только девять предлагали программу «Driver’s Ed». По словам Брауна, они использовали программу, созданную в начале 1950-х годов, которая отражает общенациональные программы вождения. С тех пор автомобили стали быстрее. На дорогах экспоненциально больше машин. Технологические отвлекающие факторы от Snapchat до Google Maps бесконечны, и все же для большинства старшеклассников по всей Америке обучение вождению не изменилось.
Закон Джошуа повышает штрафы за нарушение правил дорожного движения на 5 процентов, обеспечивая финансирование для обучения «современному» водителю в средних школах Джорджии. Обучение этому новому водителю состоит из пяти элементов: симуляция, интерактивная и увлекательная учебная программа, распознавание опасностей, участие родителей и обучение за рулем.
Обучение этому новому водителю состоит из пяти элементов: симуляция, интерактивная и увлекательная учебная программа, распознавание опасностей, участие родителей и обучение за рулем.
«Я считаю, что симуляция и современное вождение, которое я получил в средней школе, помогли мне спасти мою жизнь».
«Я считаю, что симуляция и современное вождение, которое я получил в старшей школе, помогли мне спасти мою жизнь, придавая мне больше уверенности за рулем — каждый штат должен использовать это», — говорит Пай, размышляя о полдне после аварии.
Симуляторы вождения могут иметь несколько форм. Для коммерческого использования одна из наиболее популярных версий — портативная настольная модель, которую обычно устанавливают дома, в школе или на работе за письменным столом, стоимостью около 7000 долларов. Он оснащен рулевым колесом и широким монитором, а также педалями газа и тормоза. Более дорогой тип — это модель с полной кабиной, стоимостью от 10 000 до 20 000 долларов, которая выглядит как водительская сторона автомобиля и включает в себя настоящие автомобильные детали вплоть до ключа зажигания.
«Симуляторы имитируют реальный автомобиль, вплоть до педалей газа и тормоза, сигналов, дворников и ключа зажигания», — объясняет Стив Мочел, президент программы Fresh Green Light из Коннектикута, которая дополняет традиционные тренировки интенсивным вождением. моделирование.
Virtual Driver Interactive / VDI Симуляторы вождения воспроизводят реальный опыт вождения во всех типах сценариев, включая управление транспортным средством, сканирование и обнаружение опасностей, параллельную парковку и аквапланирование. К другим ситуациям относится вождение с отвлечением и нарушениями. Он будет имитировать вождение в разное время дня и при различных погодных условиях, например, давая подсказки, такие как лучшее сканирование с помощью визуальных и устных инструкций.В современном симуляторе водителя смоделировано до 300 различных сценариев, которые обучают целому ряду когнитивных навыков, необходимых для работы со сложными дорожными и дорожными условиями, включая осведомленность о ситуации, восприятие опасности, принятие решений в условиях ограниченного времени и общие методы безопасного вождения. по словам Мохеля. Эти методы контрастируют с традиционным обучением водителей, которое зависит от погодных и транспортных условий во время вождения.
по словам Мохеля. Эти методы контрастируют с традиционным обучением водителей, которое зависит от погодных и транспортных условий во время вождения.
Трудно игнорировать статистику.В период с 2005 по 2007 год симуляторы вождения были размещены в 147 средних школах Джорджии на средства, выделенные законом Джошуа. По данным Брауна и данных, собранных Центрами по контролю и профилактике заболеваний и Управлением губернатора Джорджии, с тех пор, как были внедрены симуляторы и обновленная программа вождения, в целом по штату произошло снижение смертности подростков из-за автопомощи примерно на 60 процентов или 181 студенческую жизнь в год. безопасности дорожного движения. Согласно исследованию государственного университета Кеннесо в Атланте, в округе Гвиннетт, одном из самых густонаселенных округов Джорджии, число погибших в автомобилях подростков снизилось с 23 в 2006 году до всего пяти в 2011 году.
Исследования, проведенные в других частях страны, отражают аналогичные результаты. В январе 2013 года исследователь из Государственного университета Райта в Дейтоне, штат Огайо, показал статистически значимое снижение количества автомобильных аварий среди местных старшеклассников, которые принимали участие в виртуальном моделировании. В течение шести месяцев и одного года исследователь Питер Эке сравнил группу студентов-водителей, которые использовали симуляторы в качестве дополнения к вождению по дороге, с контрольной группой студентов, которые не использовали никаких симуляторов.Его исследование показало, что в группе студентов, которые прошли обучение на симуляторах, было значительно меньше нарушений правил вождения и не было автомобильных аварий в течение обоих периодов времени, в то время как более четверти контрольной группы испытали автомобильные аварии через год.
Виртуальный драйвер, интерактивный / VDI
Пай сейчас морской пехотинец США и выпускник Военно-морской академии США. Он отмечает, что на протяжении всей своей студенческой карьеры и даже на своей нынешней работе он подвергался симуляции как форме обучения управлению самолетом, управлению кораблем и координации стрельбы из ракет, пушек и артиллерии.«Военные часто используют симуляцию, потому что это более рентабельно и дает людям возможность испортить дело и предотвратить травмы», — говорит он.
Он отмечает, что на протяжении всей своей студенческой карьеры и даже на своей нынешней работе он подвергался симуляции как форме обучения управлению самолетом, управлению кораблем и координации стрельбы из ракет, пушек и артиллерии.«Военные часто используют симуляцию, потому что это более рентабельно и дает людям возможность испортить дело и предотвратить травмы», — говорит он.
«То, что мы сейчас делаем, — шутка».
Капитан Чесли «Салли» Салленбергер, который в январе 2009 года направил свой авиалайнер US Airways в безопасное место на реке Гудзон в Нью-Йорке, спасая всех на борту, подтверждает это мнение. Он говорит, что повторные летные тренировки с помощью симуляции дали ему «творческий резерв», чтобы мыслить нестандартно. Это позволило ему приземлиться на воду, когда в то время не было другого выхода.«Тренировки на авиасимуляторах и тимбилдинг помогли нам решить эту проблему за 208 секунд», — говорит он.
Пилоты должны тренироваться на тренажере каждые 9-12 месяцев, чтобы подготовиться к дождю, снегу, льду, туману, ветру и другим типам ненастной погоды, а также к чрезвычайным ситуациям, таким как отказ двигателя и гидравлики. «Симуляторы дают пилотам возможность многократно практиковаться и стать экспертами в ситуациях, которые редко возникают в реальных полетах, поэтому, когда они внезапно сталкиваются с аварийной ситуацией в полете, они не впервые сталкиваются с такой проблемой», — поясняет он. .
Детская больница Филадельфии Но когда дело доходит до вождения, симуляция не вошла в основное направление обучения вождению, хотя, по данным CDC, дорожно-транспортные происшествия — убийца номер один среди подростков в Америке: около 3000 смертей в год. Для сравнения: около 4500 американских солдат были убиты в войне в Ираке в период с 2003 по 2012 год, согласно iCasualties.org, который отслеживает смерти и ранения среди коалиционных сил в Ираке и Афганистане.По данным Страхового института дорожной безопасности, за тот же период более 43000 подростков в Америке погибли в автокатастрофах. «Как общество, мы должны намного лучше выполнять работу по обучению водителей. То, что мы делаем сейчас, — шутка, — говорит Салленбергер. «Если бы количество людей, погибших в автокатастрофах, погибло во время полета, это было бы равносильно тому, что авиалайнер терпит крушение почти каждый день без выживших. Мы бы не приняли это в авиации. Но как общество мы принимаем это с вождением».
«Как общество, мы должны намного лучше выполнять работу по обучению водителей. То, что мы делаем сейчас, — шутка, — говорит Салленбергер. «Если бы количество людей, погибших в автокатастрофах, погибло во время полета, это было бы равносильно тому, что авиалайнер терпит крушение почти каждый день без выживших. Мы бы не приняли это в авиации. Но как общество мы принимаем это с вождением».
«Если бы количество людей, погибших в автокатастрофах, было потеряно из-за полета, это было бы равносильно тому, что авиалайнер терпит крушение почти каждый день без выживших.»
Некоторые частные компании в США также постепенно начали внедрять симуляторы вождения. UPS, например, использовала тренажер в дополнение к обучению водителю, и результаты оказались положительными. Когда у UPS впервые возникла идея включить симуляторы в свою программу обучения водителей, она обратилась к Virtual Driver Interactive из Сакраменто, компании, с которой UPS работала в течение последнего года, чтобы обеспечить обучение на симуляторах сотрудников различных подразделений UPS на вахтовой основе.Обучение разбито на разделы, каждый модуль посвящен определенной проблеме безопасности, а вся виртуальная программа для ИБП занимает около часа. «С июля 2013 года по апрель этого года, когда мы внедрили тренажеры на нашем предприятии, мы увидели сокращение аварий на 38%», — говорит Родни Рафф, менеджер подразделения UPS в Бруклине, Нью-Йорк. С конца апреля тренажеры были переданы из Бруклинского дивизиона в дивизию в Олбани. Процент аварий в Бруклине сразу упал, а в офисе в Олбани количество аварий снизилось примерно на 50%.
VDI
Все это происходит по мере того, как автомобили становятся умнее: многие современные модели имеют функции обнаружения столкновений, которые могут помочь полностью избежать столкновений, а технологии автономного вождения не за горами. Действительно ли необходимо лучшее водительское образование? «Любой, кто думает, что через 10 лет мы все будем использовать беспилотные автомобили, восхищается технологиями, но не имеет практического смысла», — говорит Боб Дэвис, генеральный директор Virtual Driver Interactive, компании, которую он основал, чтобы помочь подросткам стать более безопасными водителями. симуляционное обучение.«Не так много профессионалов в области безопасности, которые думают, что программное обеспечение будет« пуленепробиваемым »с точки зрения ответственности во всех ситуациях в ближайшее время».
симуляционное обучение.«Не так много профессионалов в области безопасности, которые думают, что программное обеспечение будет« пуленепробиваемым »с точки зрения ответственности во всех ситуациях в ближайшее время».
«Любой, кто думает, что через 10 лет мы все будем пользоваться беспилотными автомобилями, восхищается технологиями, но это непрактично».
Настройки «автопилота» коммерческого самолета не заменили необходимости обучения пилотов, равно как и беспилотные автомобили не устранят необходимость в оценке и обучении, но исследователи говорят, что это может и поможет во многих конкретных ситуациях.По словам Дэвиса, даже малейшие производственные дефекты приводят к штрафам в размере сотен миллионов долларов. «Никто не захочет брать на себя ответственность за беспилотные автомобили на очень долгое время… может быть, детям моих подростков придется об этом беспокоиться».
Ни один симулятор не сможет повторить часы опыта в автомобиле. Однако, если они используются для дополнения реального вождения повседневными сценариями, а также опасными сценариями, с которыми в идеале водители никогда не сталкиваются, симуляторы предоставят практику и уроки, которые нужно изучить, и могут снизить количество аварий, говорит Дэвис.
Между тем, многие говорят, что высокая стоимость технологии не позволяет ей прижиться. Гоночная видеоигра может стоить всего 50 долларов, но симуляторы вождения стоят значительно дороже: учебные модели могут стоить от 7000 долларов, а исследовательские модели могут стоить до сотен тысяч долларов. По словам Дэвиса, в настоящее время большинство штатов, похоже, довольны использованием только общественных объявлений, чтобы повлиять на безопасность водителей, но простая установка рекламных щитов и проведение кампаний без текстовых сообщений и вождения — плохая замена реальной поддержке и финансированию обучения водителей.«Симуляторы, возможно, должны будут продемонстрировать более широкое улучшение статистики ДТП, прежде чем штаты потребуют симуляции либо в классах здоровья, либо в классах обучения водителей».
Также будут необходимы стимулы для водителей, чтобы они искали технологии моделирования, и для учебных центров, чтобы включить их в свои школы. По словам одного из руководителей страховых компаний, если бы страховые компании пообещали снизить взносы по автострахованию для людей, прошедших серию симуляционных курсов или получивших за это кредит, больше людей отнесутся к этому серьезно.Другие отмечают, что для внедрения симуляторов штаты могут потребовать от водителей более качественного обучения, что увеличит расходы на обучение водителей, но в долгосрочной перспективе спасет жизни. «Безопасность окупается во всех отраслях», — говорит Салленбергер, приводя пример того, что дешевле оказать первоклассную первичную медицинскую помощь в отличие от поспешной помощи с последующим повторным приемом пациентов.
Доктор Флаура Уинстон, исследователь общественного здравоохранения из Детской больницы Филадельфии, предсказывает, что внедрение тренажеров в школах по всей Америке и в системе обучения водителей в более широком смысле может «значительно» снизить количество дорожно-транспортных происшествий, если надлежащим образом интегрировать их в учебную программу для водителей.«Сбои являются основной причиной смерти подростков, — говорит она, — и к ним следует относиться как к проблеме со здоровьем».
«Безопасность окупается во всех отраслях».
В конце концов, тренажеры следует использовать не как средство запугивания, говорят исследователи и преподаватели, а для выявления недостатков в поведении водителей, их устранения и дополнения существующих тренировок, чтобы сделать дороги по всей Америке более безопасными для всех.
«В симуляции хорошо то, что всегда есть кнопка перезапуска», — говорит Пай.
Исправление: Первоначально статья предполагала, что д-р Флаура Уинстон сказала, что симуляторы могут привести к «двузначному» снижению количества автомобильных аварий, но Детская больница Филадельфии заявляет, что еще недостаточно исследований для прямой количественной оценки выгода. Текст был изменен, чтобы сказать, что правильно интегрированный симулятор может «значительно» снизить количество дорожно-транспортных происшествий.
Текст был изменен, чтобы сказать, что правильно интегрированный симулятор может «значительно» снизить количество дорожно-транспортных происшествий.
Ядро симулятора вождения | Центр исследования и профилактики травм (CIRP)
Симулятор вождения Core
Размещенный в Центре педиатрических исследований им. Робертса при Детской больнице Филадельфии, центр симулятора вождения в Центре исследования и профилактики травм (CIRP) предназначен для помощи в ответах на вопросы, полученные с помощью качественных и количественных исследований.Высокоточный симулятор вождения с фиксированной базой и симулятор мобильного вождения имеют богатую звуковую и визуальную среду для проведения исследований.
CIRP предоставляет техническую и административную поддержку, чтобы помочь исследователям в проведении наблюдательных исследований на симуляторах.
Основные характеристики
— рулевое колесо BMW с функцией автоматического обнаружения, предоставленное IEE, ведущим производителем датчиков и автомобильных компонентов. Это улучшение поможет исследователям обнаруживать, как водители держат и выключают руль, для исследований автономных транспортных средств
интегрированные расширенные, легкие возможности отслеживания взгляда, включая очки Tobii Pro 2 и программное обеспечение анализатора; программа визуализации данных на основе видео для обработки данных симулятора
специальное программирование для анализа данных отслеживания глаз
Симуляторы вождения предлагают настраиваемое программирование для воспроизведения управляемых сценариев, типичных для условий вождения, таких как динамическое поведение на дорогах, пешеходы, отвлекающие факторы, время суток и погода, в соответствии с потребностями исследователей.
Используется в исследованиях
Симуляторы вождения CIRP использовались в нескольких исследованиях по безопасности вождения среди подростков, чтобы помочь улучшить оценку навыков вождения и лучше понять поведение и эмоции при вождении с целью повышения производительности. Благодаря своей библиотеке приводов симуляторы вождения также могут помочь ответить на вопросы клинических исследований, помимо предотвращения дорожно-транспортных происшествий, включая когнитивные функции, восстановление после травм, внимание и многое другое. Использование этих симуляторов вождения также может помочь в обучении молодых водителей-новичков.
Благодаря своей библиотеке приводов симуляторы вождения также могут помочь ответить на вопросы клинических исследований, помимо предотвращения дорожно-транспортных происшествий, включая когнитивные функции, восстановление после травм, внимание и многое другое. Использование этих симуляторов вождения также может помочь в обучении молодых водителей-новичков.
Узнать больше
Свяжитесь с Chelsea Ward McIntosh, MS, CCRP для получения дополнительной информации об использовании симулятора вождения с фиксированной базой или мобильного симулятора вождения в вашем исследовании.
Simuride HE — Домашний симулятор вождения автомобиля • AplusBsoftware.com
Оттачивайте навыки, такие как параллельная парковка , объединение и прохождение с любым комплектом рулевого колеса plug-and-play.
Станьте достаточно комфортными во время вождения, чтобы не забывать регулярно осматривать , проверять слепые зоны , использовать зеркала , указатели поворота, фары и следить за своей скоростью. Вы можете сделать умное вождение привычкой .
Готовы к вождению? Просмотрите наш веб-сайт, чтобы узнать больше.
Посмотрите видео , прочтите ниже и просмотрите галерею фотографий SimuRide.
Что такое SimuRide Home Edition?
SimuRide Home Edition (HE) — это программа моделирования вождения для домашнего компьютера. Он предназначен для начинающих водителей , которые учатся на водительские права.
Программа развивает и поощряет хорошие привычки, которые будут использоваться при вождении автомобиля.
SimuRide был разработан с учетом потребностей водителя. Практикуясь на тренажере, помимо практики на реальном автомобиле, студенты могут спокойно овладеть необходимыми навыками, получить опыт, позволяющий чувствовать себя комфортно.
Симулятор не требует родительского надзора или разрешения учащегося, не использует топливо и не может быть поврежден при столкновении!
Чем больше практики, тем безопаснее дороги для всех.
Симулятор вождения автомобиля Содержание
Программа симуляции проводит студента через виртуальную трехмерную карту, которая включает:
- Парковку
- перекрестки городов
- шоссе
- темный туннель
- туманную долину
- ледяные пятна и снег / дождь
- Извилистая дорога с падающими препятствиями
Нет никакой последовательности, и учащиеся могут практиковаться в вождении, где захотят.
Он обучает студентов управлению автомобилем с автоматической коробкой передач с возможностью выбора дополнительного прицепа ..
Программное обеспечение похоже на SimuRide Professional, но оно упрощено и работает на одном мониторе домашнего компьютера.
Нажимая кнопки на руле и / или клавиатуре, пользователи могут повернуться к , посмотреть налево , направо , контролировать слепых зон и непосредственно позади своего виртуального транспортного средства на предмет приближающихся транспортных средств и препятствий .
Симулятор вождения для людей с ограниченными возможностями
SimuRide также является симулятором вождения для людей с особыми потребностями.
Наш SimuRide можно использовать также с Xbox Adaptive Controller.
Поскольку это конкретное колесо оснащено кнопками акселератора и тормоза (аналоговыми) на рулевом колесе, его можно использовать с нашим SimuRide HE для обучения и практики вождения людьми , у которых есть некоторые ограничения в ногах и которые вынуждены использовать руки для ускорения или торможения автомобиля.
Уроки по SimuRide HE
SimuRide HE заставляет учащихся использовать зеркала заднего вида , фары и поворотники .
Нервные водители могут почувствовать шаги, которые они должны предпринять при трогании с места, повороте и парковке. Когда они водят настоящий автомобиль, они будут меньше вспоминать, что им нужно делать.
Какие навыки можно практиковать с симулятором вождения Home Edition?
Важные навыки, которые можно практиковать на SimuRide HE:
- Запуск автомобиля и включение правильной передачи (автоматический)
- Ускорение, замедление и торможение
- Знание дорожных знаков, светофоров, и другие автомобили
- Поворот и движение задним ходом с помощью сигналов и зеркал заднего вида
- Парковка в специально отведенном месте
- Параллельная парковка
- Принятие решения и реакция на движущиеся препятствия и дорожные блоки
- Взаимодействие с другими автомобилистами на дороге и на перекрестках
- Поддержание хорошей скорости движения
- Контроль скольжения на обледенелой дороге во время снегопада / дождя
- Обгон движущегося транспортного средства
- Выезд на шоссе
- Включение фар в темноте
- Движение, поворот и движение задним ходом с прицепом
Когда использовать S imuRide HE
SimuRide HE был разработан для обучения и повышения навыков вождения , особенно если доступ к учебному автомобилю ограничен.
Студенты должны практиковаться с SimuRide HE рядом с реальным транспортным средством для достижения наилучшего эффекта.
Маленькие дети могут заранее поиграть в программу, а лицензированные водители могут улучшить свои навыки вождения, например, параллельную парковку и вождение с прицепом.
SimuRide HE отлично подходит для подготовки к водительскому тесту . Чтобы подготовиться к письменному тесту, поищите в Интернете программное обеспечение для экзаменов по вождению для США и Канады от AplusB Software.
Не все студенты имеют доступ к учебному автомобилю, времени для практики или автошколе.Родители или владельцы транспортных средств для практики ограничивают их использование, когда топлива или риск аварии является большой проблемой.
Использование SimuRide HE обеспечивает большую практику без использования топлива и обеспечивает безопасность водителей .
SimuRide — отличное дополнение к учебе в школе или по книге; это намного интереснее, веселее и увлекательнее.
Доступность программного обеспечения
SimuRide Home Edition теперь доступен в нашем интернет-магазине по цене 75 долларов США.
Требования к компьютеру
В дополнение к программному обеспечению SimuRide HE вам потребуется следующее оборудование:
- Настольный или портативный компьютер
- Компьютерный монитор, телевизор или настенный проектор
- Любой комплект рулевого колеса с функцией plug-and-play (рулевое колесо, педаль и рычаг переключения передач некоторых моделей) доступны в нашем интернет-магазине
Ваш домашний компьютер должен иметь следующие характеристики:
- Операционная система Windows: Windows 10, 8, 7, XP или Vista
- Для XP : RAM 1GB
- Для Windows 8, 7 и Vista: RAM 2GB
- Для Windows 10: RAM 4GB
- Предлагаемый процессор — Intel Core 2 Duo — Clock 2.66 ГГц или эквивалент
- Минимальная видеокарта — Nvidia GeForce 7600 GT или любая другая карта с минимальным рейтингом G3D 393 и максимальным рейтингом 363.
- Проверьте свою видеокарту здесь: http://www.videocardbenchmark.net/gpu_list.php
- Для некоторых старых компьютеров мы предоставляем 3D Software Accelerator и несколько дополнительных функций (реализованных в программном обеспечении SimuRide HE), которые делают SimuRide HE более совместимым.
- Пользователи компьютеров Mac могут запускать SimuRide, установив эмулятор Windows. Эмулятор — это программа, которая позволяет компьютерам Mac OS запускать программы на базе Windows.
 Эмулятор — это программа, которая позволяет компьютерам Mac OS запускать программы на базе Windows.
Эмулятор — это программа, которая позволяет компьютерам Mac OS запускать программы на базе Windows.Поддержка и обновления
Вы можете связаться с нами с 8:30 до 17:00 (EST) с понедельника по пятницу.
Мы предоставляем техническую поддержку первого уровня по электронной почте: [email protected]
Руководство по SimuRide HE (прочтите перед установкой): щелкните здесь.
Необходимо использовать рулевое колесо с педалями.
Перед запуском программы симулятора SimuRide HE необходимо запустить конфигурацию рулевого управления.
Если на вашем рулевом колесе недостаточно кнопок / элементов управления или вы хотите использовать наши стандартные клавиши для некоторых функций, вот их список:
Зажигание «I»
Стартер «S»
Ремни « B »
Аварийный тормоз« E »
Следующая передача« Страница вниз »
Предыдущая передача« Страница вверх »
Полный список и другую важную информацию можно найти в PDF-документе SimuRide Manual, который находится на диске и в основной программе Меню под кнопкой «Справка».
Установка симулятора
Пожалуйста, посмотрите наш 8-минутный видеоролик (указанный выше) перед тем, как начать установку SimuRide HE на свой компьютер!
Это видео очень важно и подробно объясняет, как установить и настроить программу симулятора и рулевое колесо с педалями.
Вам нужно перейти в ПУСК / Все программы / Программное обеспечение A + B / Конфигурация рулевого колеса, чтобы иметь возможность использовать рулевое колесо.
Дополнительная информация
Программное обеспечение SimuRide Home Edition для моделирования вождения предназначено для правостороннего и левостороннего движения для использования дома.
Для школ и любых коммерческих целей мы предлагаем SimuRide Professional Edition.
Home Edition предназначен только для домашнего использования, это не одобрено для любого типа бизнеса.
Это программное обеспечение выдает предупреждения, если оно используется в школах или на предприятиях, о том, что это незаконная практика, и просит пользователя связаться с властями.
Рынок симуляторов вождения по приложениям, типам транспортных средств, типам симуляторов и регионам — глобальный прогноз до 2025 года
СОДЕРЖАНИЕ
1 ВВЕДЕНИЕ (Стр.- 22)
1.1 ЦЕЛИ ИССЛЕДОВАНИЯ
1.2 ОПРЕДЕЛЕНИЕ РЫНКА
1.2.1 ВКЛЮЧЕНИЯ И ИСКЛЮЧЕНИЯ
ТАБЛИЦА 1 ВКЛЮЧЕНИЯ И ИСКЛЮЧЕНИЯ ДЛЯ РЫНКА ДВИЖЕНИЯ СИМУЛЯТОРА
1.3 ОБЪЕМ РЫНКА
РИСУНОК 1 РЫНОК РЫНКА ДВИЖЕНИЯ СИМУЛЯТОРА: 904 ДЛЯ ИССЛЕДОВАНИЯ
1.4 РАЗМЕР УПАКОВКИ
1.5 ОГРАНИЧЕНИЯ
1.6 ЗАИНТЕРЕСОВАННЫЕ СТОРОНЫ
1.7 СВОДКА ИЗМЕНЕНИЙ
2 МЕТОДОЛОГИЯ ИССЛЕДОВАНИЙ (Стр.- 28)
2.1 ДАННЫЕ ИССЛЕДОВАНИЙ
РИСУНОК 2 ПРОЕКТ ИССЛЕДОВАНИЯ
РИСУНОК 3 МОДЕЛЬ МЕТОДОЛОГИИ ИССЛЕДОВАНИЯ
2.1.1 ВТОРИЧНЫЕ ДАННЫЕ
2.1.1.1 Список ключевых вторичных источников
2.1.1.2 Ключевые данные из вторичных источников
2.1.2 ПЕРВИЧНЫЕ ДАННЫЕ
РИСУНОК 4 РАЗБИВКА ПЕРВИЧНЫХ ИНТЕРВЬЮ: ПО ТИПУ, НАЗНАЧЕНИЮ И РЕГИОНУ КОМПАНИИ
2.1.2.1 Список основных участников
2.2 МЕТОДОЛОГИЯ ОЦЕНКИ РЫНКА
РИСУНОК 5 МЕТОДОЛОГИЯ ИССЛЕДОВАНИЯ: СОЗДАНИЕ ГИПОТЕЗИРОВАНИЯ
2.2.1 ВЫСОКИЙ ПОДХОД
РИС. : ПОДХОД ВЕРХНИЙ
РИСУНОК 8 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ: ДИЗАЙН И МЕТОДОЛОГИЯ ИССЛЕДОВАНИЙ
РИСУНОК 9 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ: МЕТОДОЛОГИЯ ИССЛЕДОВАНИЯ2.2 АНАЛИЗ ФАКТОРОВ ДЛЯ РАЗМЕРА РЫНКА: СПРОС И ПРЕДЛОЖЕНИЕ
2.3 ТРИАНГУЛЯЦИЯ ДАННЫХ
РИСУНОК 10 МЕТОДОЛОГИЯ ТРИАНГУЛЯЦИИ ДАННЫХ
2.4 АНАЛИЗ ФАКТОРОВ
2.5 ИССЛЕДОВАТЕЛЬСКИЕ ДОПУЩЕНИЯ
2.6 ОГРАНИЧЕНИЯ ИССЛЕДОВАНИЙ
3 РЕЗЮМЕ (Страница № — 41)
РИСУНОК 11 СИМУЛЯТОР ВОЖДЕНИЯ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ: ПРОГНОЗ РЫНКА
РИСУНОК 12 СИМУЛЯТОР ВОЖДЕНИЯ: ПРОГНОЗ РЫНКА
РИСУНОК 13 СИМУЛЯТОР ДВИЖЕНИЯ РЫНКА: ДИНАМИЧЕСКИЙ ДИНАМИК РЫНКА 14 РИСУНОК 14 РЫНОЧНЫЙ ДИНАМИК ПРИЛОЖЕНИЕ ДЛЯ ОБУЧЕНИЯ, 2020 VS. 2025 г. (МЛН ДОЛЛ. США)
2025 г. (МЛН ДОЛЛ. США)
РИСУНОК 15 РЫНОК ДВИГАТЕЛЕЙ СИМУЛЯТОРОВ, ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2020 г. 2025 (МЛН ДОЛЛ. США)
3.1 ВЛИЯНИЕ COVID-19 НА РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ
3.2 ВЛИЯНИЕ COVID-19 НА РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ
4 PREMIUM INSIGHTS (Страница № 48)
4.1 ЗНАЧИТЕЛЬНЫЙ РОСТ РЫНКА СИМУЛЯТОРОВ В ПРОГНОЗНОМ ПЕРИОДЕ (2020-2025) 4.2 ЗНАЧИТЕЛЬНЫЙ РОСТ РЫНКА СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ В ПРОГНОЗНЫЙ ПЕРИОД (2020–2025 гг.) 2020
РИСУНОК 18 ДОЛЯ НА РЫНКЕ СИМУЛЯТОРОВ ДЛЯ ДВИЖЕНИЯ, ПО РЕГИОНАМ, 2020 г.
4.4 ГЛОБАЛЬНЫЙ РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ТИПАМ АВТОМОБИЛЕЙ И ТИПУ СИМУЛЯТОРА
РИС.5 РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЕМ
РИС. 2025 (МИЛЛИОН ДОЛЛАРОВ США)
4.6 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЕЙ НА ТРЕНИРОВКЕ СИМУЛЯТОРА ВОЖДЕНИЯ
РИС. 2025 (МЛН ДОЛЛ. США)
4.7 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЬСТВА ПО ТИПАМ АВТОМОБИЛЕЙ
РИСУНОК 22 ОЖИДАЕТСЯ, что АВТОМОБИЛЬНЫЙ СИМУЛЯТОР ИМЕЕТ БОЛЬШУЮ АКЦИЮ, 2020 2025 (МЛН ДОЛЛ. США)
4.8 РЫНОК ДВИЖЕНИЙ СИМУЛЯТОРОВ, ПО ВИДУ ПРИЛОЖЕНИЯ
РИСУНОК 23 ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ, ОЦЕНЕННЫЕ ДЛЯ УДЕРЖАНИЯ КРУПНЕЙШИХ РЫНКОВ, 2020 VS.2025 (МЛН ДОЛЛ. США)
4.9 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО ПРИЛОЖЕНИЮ
РИСУНОК 24 АВТОМОБИЛЬ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ КРУПНЕЙШЕГО РЫНКА, 2020 VS. 2025 г. (МЛН ДОЛЛ. США)
4.10 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ
РИСУНОК 25 КРУПНЕЙШИЙ РЫНОК В ЕВРОПЕ, 2020 г. 2025 г. (МЛН ДОЛЛ. США)
5 ОБЗОР РЫНКА (Страница № — 54)
5.1 ВВЕДЕНИЕ
5.2 ДИНАМИКА РЫНКА
РИСУНОК 26 РЫНОК ДИНАМИЧЕСКИХ СИМУЛЯТОРОВ: ДИНАМИКА РЫНКА
5.2.1 ВОДИТЕЛИ
5.2.1.1 Нехватка квалифицированных водителей
РИСУНОК 27 СИМУЛЯТОР ВОЖДЕНИЯ: ЦИКЛ РАЗРАБОТКИ ОБУЧЕНИЯ НА ОСНОВЕ СЦЕНАРИЙ (SBT)
5.2.1.2 Требования к профессиональной подготовке пилотов новых локомотивов
ТАБЛИЦА 2 ГЛОБАЛЬНЫЕ ЖЕЛЕЗНОДОРОЖНЫЕ ПРОЕКТЫ, КОТОРЫЕ МОГУТ НАБЛЮДАТЬ В БУДУЩЕМ в центре внимания НИОКР
ТАБЛИЦА 3 ЕВРОПА: ГОДОВОЕ КОЛИЧЕСТВО Дорожных аварий со смертельным исходом, ПО СТРАНАМ (2012-2016)
РИСУНОК 28 ЕВРОПА. СТРАНА (2018)
СТРАНА (2018)
5.2.2 ОГРАНИЧЕНИЯ
5.2.2.1 Сложности в управлении в реальном времени
5.2.3 ВОЗМОЖНОСТИ
5.2.3.1 Рост воздушного движения и проекты аэропортов во всем мире
ТАБЛИЦА 4 ОБЗОР ИНВЕСТИЦИЙ В СТРОИТЕЛЬСТВО АЭРОПОРТА: ТЕКУЩИЕ И ПРОГНОЗИРУЕМЫЕ ИНВЕСТИЦИИ В ГЛОБАЛЬНЫЕ АЭРОПОРТЫ (МИЛЛИОН ДОЛЛАРОВ США)
ТАБЛИЦА 5 И ПРОГНОЗИРУЕМЫЕ ИНВЕСТИЦИИ В УЛУЧШЕНИЕ МИРОВОГО АЭРОПОРТА (МЛН. ДОЛЛАРОВ США)
5.2.3.2 Симуляторы для полицейских и аварийных автомобилей
5.2.3.3 Развитие автономных и полуавтономных транспортных средств
РИСУНОК 30 ЭВОЛЮЦИЯ АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
5.2.4 ПРОБЛЕМЫ
5.2.4.1 Сложности интеграции
5.2.4.2 Отсутствие тестов и стандартов
ТАБЛИЦА 6 ВЛИЯНИЕ ДИНАМИКИ РЫНКА
5.3 ИЗМЕНЕНИЕ ВЫРУЧКИ, ДИНАМИКА РОСТА РЫНКА
5.4 НЕДОПУСТИМЫЙ ДОХОД: ВОЗМОЖНОСТИ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ ПРОФЕССИОНАТЕЛЕМ СИМУЛЯТОРОВ
5.5 PORTERS FIVE FORCES
РИСУНОК 31 PORTERS FIVE FORCES: DRIVING SIMULATOR MARKET
5.6 ТЕХНОЛОГИЧЕСКИЙ АНАЛИЗ. 3 AI ДЛЯ СИМУЛЯТОРА ВОЖДЕНИЯ
5.6.4 ADAS (РАСШИРЕННАЯ СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ)
5.7 НОВЫЕ ТЕНДЕНЦИИ: СИМУЛЯТОР VR
5.7.1 СИМУЛЯТОР ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (VR)
5.8 ОБУЧАЮЩИЕ СИМУЛЯТОРЫ ТЕХНОЛОГИЯ ДЛЯ ECO-DRIVING
5.9 ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ С ОТКРЫТЫМ ИСТОЧНИКОМ ДЛЯ АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
5.9.1 APOLLO
5.9.2 AUTOWARE
5.9.3 EB ROBINOS & EB ROBINOS PREDICTORS — ELEKTORBIT 904 5.9 Nvidia 5.10 АНАЛИЗ ЭКОСИСТЕМЫ
РИСУНОК 32 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ: АНАЛИЗ ЭКОСИСТЕМ
5.11 АНАЛИЗ ЦЕН
ТАБЛИЦА 7 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ: СРЕДНЯЯ ЦЕНА НА СИМУЛЯТОР
5.12 АНАЛИЗ ЦЕПИ ПОСТАВОК
РИСУНОК 33 РЫНОК ДВИЖУЩИХСЯ СИМУЛЯТОРОВ: АНАЛИЗ ЦЕПИ СТОИМОСТИ
5.13 АНАЛИЗ ПАТЕНТОВ
ТАБЛИЦА 8 ВАЖНЫЕ ПАТЕНТНЫЕ РЕГИСТРАЦИИ, СВЯЗАННЫЕ С РЫНОМ УПРАВЛЕНИЯ СИМУЛЯТОРОМ
5.14 ПРИМЕР ИССЛЕДОВАНИЯ 904 ГЕНЕРАЛЬНОГО АНАЛИЗА ГЕНЕРАТОРА
5. 14. ТРАЕКТОРИИ, ИСПОЛЬЗУЮЩИЕ МОДЕЛЬ ПРОГНОЗНОГО КОНТРОЛЯ
14. ТРАЕКТОРИИ, ИСПОЛЬЗУЮЩИЕ МОДЕЛЬ ПРОГНОЗНОГО КОНТРОЛЯ
5.14.2 SIEMENS AG
5.14.3 РАСШИРЕННЫЙ СИМУЛЯТОР РАСПОЛОЖЕНИЯ ПОЕЗДА (ATLAS)
5.15 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, СЦЕНАРИИ (2020-2025)
РИСУНОК 35 ТЕНДЕНЦИИ И СЦЕНАРИИ НА РЫНКЕ СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, 20202025 гг. (МЛН. Долл. США)
5.15.1 НАИБОЛЕЕ ВЕРОЯТНЫЙ СЦЕНАРИЙ
)
5.15.2 ОПТИМИСТИЧЕСКИЙ СЦЕНАРИЙ
ТАБЛИЦА 10 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЯ: ОПТИМИСТИЧЕСКИЙ СЦЕНАРИЙ, ПО РЕГИОНАМ, 20202025 (МИЛЛИОНЫ ДОЛЛАРОВ США)
5.16 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, СЦЕНАРИИ (2020-2025)
РИСУНОК 36 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ БУДУЩИЕ ТЕНДЕНЦИИ И СЦЕНАРИИ, 2020-2025 (МИЛЛИОН ДОЛЛАРОВ) СЦЕНАРИИ, ПО РЕГИОНАМ, 2020-2025 (МЛН. ДОЛЛАРОВ)
5.16.2 ОПТИМИСТИЧЕСКИЙ СЦЕНАРИЙ
ТАБЛИЦА 13 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ: ПТИМИСТИЧЕСКИЙ СЦЕНАРИЙ, ПО РЕГИОНАМ, 2020-2025 (МЛН. ДОЛЛАРОВ)
5.16.3 ПЕССИМИСТИЧЕСКИЙ СЦЕНАРИЙ
ТАБЛИЦА 14 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ: ПЕССИМИСТИЧЕСКИЕ СЦЕНАРИИ, ПО РЕГИОНАМ, 2020-2025 (МЛН. ДОЛЛАРОВ)
6 ВЛИЯНИЕ COVID 19 (стр. № 79)
6.1 ВЛИЯНИЕ НА РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ
6.2 ВЛИЯНИЕ НА МИРОВУЮ ЖЕЛЕЗНОДОРОЖНУЮ ИНДУСТРИЮ
6.3 ВЛИЯНИЕ НА МИРОВОЙ РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ
7 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО ПРИМЕНЕНИЮ (стр.- 81)
7.1 ВВЕДЕНИЕ
РИСУНОК 37 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ПОДГОТОВКИ ПО ПРИМЕНЕНИЮ, 2020 VS. 2025 г. (ТЫС. ДОЛЛАРОВ)
ТАБЛИЦА 15 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО ПРИМЕНЕНИЮ, 2019 г. 2025 г. (ЕДИНИЦ)
ТАБЛИЦА 16 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО ПРИМЕНЕНИЮ, 2019 г. ДОПУЩЕНИЯ
ТАБЛИЦА 17 ДОПУЩЕНИЯ: ПО ПРОФЕССИОНАЛЬНОМУ ОБУЧЕНИЮ ПРИЛОЖЕНИЕ
7.1.3 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ ИНСАЙТЫ
РИСУНОК 38 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ ИНСАЙТЫ
7.2 RAIN
7. 2.1 Текущие проекты для высокоскоростных поездов повысят спрос на
2.1 Текущие проекты для высокоскоростных поездов повысят спрос на
ТАБЛИЦА 18 РАЗРАБОТКИ ТРЕНИРОВОЧНЫХ СИМУЛЯТОРОВ И КОНТРАКТЫ ДЛЯ ТРЕНИРОВКИ ТРЕНИНГА
ПО ВИДУ ЖЕЛЕЗНЫХ ДВИЖЕНИЙ, 20192025 (ЕДИНИЦЫ)
ТАБЛИЦА 20 ЖЕЛЕЗНЫЕ ДОРОГИ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО ВИДАМ ЖЕЛЕЗНЫХ ДВИЖЕНИЙ, 20192025 (ТЫСЯЧИ ДОЛЛАРОВ США)
7.2.2 ПАССАЖИРСКИЙ ПОЕЗД
7.2.3 ГРУЗОВЫЙ
7.2.4 МЕТРО
ТАБЛИЦА 21 СПИСОК ЭКСПЛУАТАЦИОННЫХ И СТРОИТЕЛЬНЫХ ПРОЕКТОВ МЕТРО В ИНДИИ
ТАБЛИЦА 22 СПИСОК ОДОБРЕННЫХ ПРОЕКТОВ МЕТРО В ИНДИИ
7.2.5 МОНОРАЛ И ТРАМВАЙ
7.3 АВТОБУС
ПОВЫШЕНИЕ ЧАСТОТЫ ДОРОЖНЫХ АВАРИЙ СПОСОБСТВУЕТ ОБУЧЕНИЮ БЕЗОПАСНОМУ ВОЖДЕНИЮ ДЛЯ АВТОБУСОВ
ТАБЛИЦА 23 АВТОБУС: РЫНКИ СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 20192025 (ЕДИНИЦЫ) ТЫСЯЧ)
7.4 АВТОМОБИЛЬ
7.4.1 РЕАЛЬНАЯ ИНТЕРПРЕТАЦИЯ ДЕЙСТВИТЕЛЬНЫХ УСЛОВИЙ ВОЖДЕНИЯ — ГЛАВНОЕ ПРЕИМУЩЕСТВО СИМУЛЯТОРОВ АВТОМОБИЛЯ
ТАБЛИЦА 25 АВТОМОБИЛЬ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 2019-2025 (ЕДИНИЦЫ) РЕГИОН, 20192025 (ТЫС. ДОЛЛАРОВ)
7.5 ГРУЗОВИК
7.5.1 ПОРТАТИВНОСТЬ И ЭФФЕКТИВНОСТЬ СИМУЛЯТОРОВ ГРУЗОВИКА
ТАБЛИЦА 27 TRUCK: РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 20192025 (ЕДИНИЦЫ) МАШИНЫ 28
(ЕДИНИЦЫ) РЫНОК ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ ПО РЕГИОНАМ, 20192025 (ТЫСЯЧ ДОЛЛАРОВ США)
7.6 ПОЛИЦИЯ
7.6.1 ВНЕДРЕНИЕ РАСШИРЕННЫХ СИСТЕМ ТАКТИЧЕСКОГО ОБУЧЕНИЯ ДЛЯ ВОПРОСА
ТАБЛИЦА 29 ПОЛИЦИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 20192025 (ЕДИНИЦЫ) (ТЫСЯЧ ДОЛЛАРОВ
7.7 МОТОЦИКЛ
7.7.1 НЕОБХОДИМОСТЬ БЕЗОПАСНОЙ ЕЗДЫ И ПРЕДОТВРАЩЕНИЕ РИСКОВ ДЛЯ ВОЖДЕНИЯ СПРОСА
ТАБЛИЦА 31 МОТОБАЙК: РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ, ПО РЕГИОНАМ, 20192025 (ЕДИНИЦЫ ДЛЯ ДВИГАТЕЛЯ). , ПО РЕГИОНАМ, 20192025 (ТЫСЯЧ ДОЛЛАРОВ США)
7.8 СИМУЛЯТОР ВОЗДУШНОГО ВОЖДЕНИЯ
7.8.1 НЕОБХОДИМО ПОВЫШЕНИЕ ЭКСПЛУАТАЦИОННОЙ ЭФФЕКТИВНОСТИ АВТОМОБИЛЕЙ В АЭРОПОРТУ ТРЕБОВАНИЯ ТРЕБОВАНИЯ
ТАБЛИЦА 33 СИМУЛЯТОРЫ ОБОРУДОВАНИЯ ОТ РАЗЛИЧНЫХ КОМПАНИЙ
РИСУНОК 39 СИМУЛЯТОР ПРИВОДА ВОЗДУХА / СИСТЕМЫ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА
РЕГИОН, 20192025 (ЕДИНИЦЫ)
ТАБЛИЦА 35 СИМУЛЯТОР ВОДИТЕЛЬСКОГО ВОДА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 20192025 (ТЫСЯЧ ДОЛЛАРОВ США)
8 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ПРИМЕНЕНИЮ (стр. — 99)
— 99)
8.1 ВВЕДЕНИЕ
РИСУНОК 40 РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, ПО ПРИМЕНЕНИЮ, 2020 г. 2025 (МЛН ДОЛЛ. США)
ТАБЛИЦА 36 РЫНОК СИМУЛЯТОРОВ ДЛЯ ДВИЖЕНИЯ, ПО ПРИЛОЖЕНИЮ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 37 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРИМЕНЕНИЯ, ПО ПРИМЕНЕНИЮ, 2020 г. 2025 г. (МЛН ДОЛЛ. США)
8.1.1 МЕТОД ИССЛЕДОВАНИЯ : ПО ПРИЛОЖЕНИЮ
8.1.3 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ ИНСАЙТЫ
РИСУНОК 41 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ ИНСАЙТЫ
8.2 ИССЛЕДОВАНИЯ И ТЕСТИРОВАНИЕ
8.2.1 ЕВРОПА БУДЕТ ЛИДЕРОМ СЕГМЕНТА ИССЛЕДОВАНИЙ И ТЕСТИРОВАНИЯ
ТАБЛИЦА 39 ИССЛЕДОВАНИЯ И ТЕСТИРОВАНИЕ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ДВИЖЕНИЯ, ПО РЕГИОНАМ, 2017-2019 (МИЛЛИОН ДОЛЛ. США) 20202025 (МЛН ДОЛЛ. США)
8.3 ТРЕНИНГ
8.3.1 РАСТУЩИЕ ОБЕСПЕЧЕНИЯ ДОРОЖНЫХ АВАРИЙ ДЛЯ ДВИЖЕНИЯ СЕГМЕНТА
ТАБЛИЦА 41 ОБУЧЕНИЕ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО РЕГИОНАМ, 20172019 (МИЛЛИОН ДОЛЛАРОВ)
ТАБЛИЦА 42 ТРЕНИРОВКА НА СИМУЛЯТОРЕ: ВОЖДЕНИЕ 20202025 (МЛН ДОЛЛ. США)
9 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЕМ (стр.- 105)
9.1 ВВЕДЕНИЕ
РИСУНОК 42 РЫНОК ДВИЖУЩИХСЯ СИМУЛЯТОРОВ, ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2020 г. 2025 (МЛН ДОЛЛ. США)
ТАБЛИЦА 43 РЫНОК ДВИЖУЩИХСЯ СИМУЛЯТОРОВ, ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2017-2019 (МЛН. ДОЛЛ. 45 ПРЕДПОЛОЖЕНИЯ: КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЕМ
9.1.3 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ ИНФОРМАЦИИ
РИСУНОК 43 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ ИНФОРМАЦИИ
9.2 РАСШИРЕННЫЙ СИМУЛЯТОР ВОЖДЕНИЯ
9.3 СИМУЛЯТОР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЯ
9.4 СИМУЛЯТОР ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ
10 РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, ПО ВИДУ СИМУЛЯТОРА (Страница № — 110)
10.1 ВВЕДЕНИЕ
РИСУНОК 44 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЯ, ПО ВИДУ СИМУЛЯТОРА, 2020 г. 2025 (МЛН ДОЛЛ. США)
ТАБЛИЦА 46 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ТИПАМ СИМУЛЯТОРА, 2017-2019 гг. (МЛН ДОЛЛ. США)
ТАБЛИЦА 47 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ТИПАМ СИМУЛЯТОРОВ, 2020-2025 гг. (МЛН. Долл. США)
10.1.1 МЕТОДИКА ИССЛЕДОВАНИЯ
10. 1.2 ПРЕДПОЛОЖЕНИЯ
1.2 ПРЕДПОЛОЖЕНИЯ
ТАБЛИЦА 48 ПРЕДПОЛОЖЕНИЯ: ПО ТИПУ СИМУЛЯТОРА
10.1.3 ОСНОВНЫЕ ОСНОВНЫЕ ИНФОРМАЦИИ
РИС. РАСШИРЕННЫЕ ЦЕЛИ
ТАБЛИЦА 49 РАСШИРЕННЫЙ СИМУЛЯТОР ВОЖДЕНИЯ: РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, ПО РЕГИОНАМ, 2017-2019 гг. (МЛН ДОЛЛ. США)
ТАБЛИЦА 50 РАСШИРЕННЫЙ СИМУЛЯТОР ВОЖДЕНИЯ: РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, ПО РЕГИОНАМ, 2020–2025 гг.3 ОБУЧЕНИЕ СИМУЛЯТОРА ВОЖДЕНИЯ
10.3.1 НЕОБХОДИМО ОБУЧИТЬ НОВЫХ ВОДИТЕЛЕЙ СООТВЕТСТВУЮЩИМ НАВЫКАМ, ОЖИДАЕМЫМ ДЛЯ ПРИВОДА СЕГМЕНТА
ТАБЛИЦА 51 СИМУЛЯТОР ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЬСТВА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО РЕГИОНАМ, 2017-2019 (МИЛЛИОН ДОЛЛ. , ПО РЕГИОНАМ, 20202025 (МЛН ДОЛЛ. США)
11 РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ ПО ОБУЧЕНИЮ СИМУЛЯТОРА ВОЖДЕНИЯ (Страница № — 116)
11.1 ВВЕДЕНИЕ
РИСУНОК 46 ИНСТРУМЕНТЫ ДЛЯ МОДЕЛИРОВАНИЯ2025 (МЛН ДОЛЛ. США)
ТАБЛИЦА 53 РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, ПО УЧЕБНОМУ СИМУЛЯТОРУ, 20172019 (МЛН ДОЛЛ.
ТАБЛИЦА 55 ПРЕДПОЛОЖЕНИЯ: НА ТРЕНИРОВКЕ СИМУЛЯТОРА ВОЖДЕНИЯ
11.1.3 КЛЮЧЕВЫЕ ПЕРВИЧНЫЕ МЕРЫ
РИС.2 КОМПАКТНЫЙ СИМУЛЯТОР
11.2.1 КОМПАКТНОСТЬ, ПОРТАТИВНОСТЬ И НИЗКОЕ ПОБЕРЕЖЬЕ ДЛЯ ДВИЖЕНИЯ СЕГМЕНТА
ТАБЛИЦА 56 КОМПАКТНЫЙ СИМУЛЯТОР: РЫНОК СИМУЛЯТОРОВ ДЛЯ ДВИЖЕНИЯ, ПО РЕГИОНАМ, 2017-2019 (МИЛЛИОНЫ ДОЛЛ. США)
ТАБЛИЦА 57 КОМПАКТНЫЙ СИМУЛЯТОР: РЫНОК DRIVING SIMULATOR25, 2020 ГОД (МЛН ДОЛЛ. США)
11.3 ПОЛНОМАСШТАБНЫЙ СИМУЛЯТОР
11.3.1 ПОЛНОСТЬЮ ИНСТРУМЕНТОВАННЫЕ ФИКСИРОВАННЫЕ КАБИНЫ ПОЛНОМАСШТАБНЫХ СИМУЛЯТОРОВ ДОПУСКАЮТ РЕАЛЬНЫЙ ОПЫТ -МАСШТАБНЫЙ СИМУЛЯТОР: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО РЕГИОНАМ, 2020-2025 (МЛН. ДОЛЛАРОВ)
12 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЬСТВА ПО ТИПАМ АВТОМОБИЛЯ (стр.- 122)
12.1 ВВЕДЕНИЕ
РИСУНОК 49 РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020 г. 2025 (МЛН ДОЛЛ. США)
ТАБЛИЦА 60 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 61 РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020 г. 62 ДОПУЩЕНИЯ: ПО ТИПУ АВТОМОБИЛЯ
62 ДОПУЩЕНИЯ: ПО ТИПУ АВТОМОБИЛЯ
12.1.3 КЛЮЧЕВЫЕ ОСНОВНЫЕ ДАННЫЕ
РИСУНОК 50 КЛЮЧЕВЫЕ ОСНОВНЫЕ ДАННЫЕ
12.2 АВТОМОБИЛЬНЫЙ СИМУЛЯТОР
12.2.1 РЕАЛЬНАЯ ИНТЕРПРЕТАЦИЯ РЕАЛЬНЫХ УСЛОВИЙ ВОЖДЕНИЯ — ГЛАВНОЕ ПРЕИМУЩЕСТВО АВТОМОБИЛЬНЫХ СИМУЛЯТОРОВ
ТАБЛИЦА 63 АВТОМОБИЛЬНЫЙ СИМУЛЯТОР: РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЯ, ПО РЕГИОНАМ, 2017-2019 (МИЛЛИОН ДОЛЛ. США) 20202025 (МЛН ДОЛЛАРОВ США)
12.3 СИМУЛЯТОР ГРУЗОВИКОВ И АВТОБУСОВ
12.3.1 СПРОС НА СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ КОММЕРЧЕСКИХ ГРУЗОВИКОВ И АВТОБУСОВ ОЖИДАЕТСЯ УВЕЛИЧЕНИЕ ТАБЛИЦА 66 СИМУЛЯТОР ГРУЗОВИКОВ И АВТОБУСОВ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО РЕГИОНАМ, 2020-2025 гг. (МЛН. Долл. США)
13 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ (Стр.- 129)
13.1 ВВЕДЕНИЕ
РИСУНОК 51 РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 2020 VS. 2025 г. (МЛН ДОЛЛ. США)
ТАБЛИЦА 67 СИМУЛЯТОР ВОЖДЕНИЯ ДЛЯ РЫНКА ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 2019 г. 2025 г. (ЕДИНИЦ)
ТАБЛИЦА 68 СИМУЛЯТОР ВОЖДЕНИЯ ДЛЯ РЫНКА ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ, ПО РЕГИОНАМ, 2019 г. -DOF MOTION BASE, ИСПОЛЬЗУЕМЫЕ В ТРЕНИРОВОЧНЫХ СИМУЛЯТОРАХ
РИСУНОК 53 СИМУЛЯТОР DIM250 ОТ VI-КЛАССА
13.3 ЕВРОПА
РИСУНОК 54 АРХИТЕКТУРА ИНТЕГРИРОВАННОГО СИМУЛЯТОРА ОБОРУДОВАНИЯ ДВИЖЕНИЯ (IDHIL) ДЛЯ ТЕСТИРОВАНИЯ И ОЦЕНКИ КООПЕРАТИВНЫХ СИСТЕМ ЭКО-ПРИВОДА
13,4 LATIN AMERICA
РИСУНОК 55 DIM250 VI-SIMULAT
14 РЫНОК СИМУЛЯТОРОВ ДВИЖЕНИЯ, ПО РЕГИОНАМ (Страница № — 137)
14.1 ВВЕДЕНИЕ
РИСУНОК 56 РЫНОК СИМУЛЯТОРОВ ВОДЫ, ПО РЕГИОНАМ, 2020 VS. 2025 год
ТАБЛИЦА 69 РЫНОК СИМУЛЯТОРОВ ДЛЯ ДВИЖЕНИЯ ПО РЕГИОНАМ, 2017-2019 гг. (МЛН ДОЛЛ. США)
ТАБЛИЦА 70 РЫНОК СИМУЛЯТОРОВ ПРИВОДА, ПО РЕГИОНАМ, 2020–2025 гг. (МЛН долл. США)
14.2 ASIA PACIFIC
РИСУНОК 57 Азиатско-Тихоокеанский регион: ОБЗОР РЫНКА ТРЕНИРОВОЧНЫХ СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ
ТАБЛИЦА 71 Азиатско-Тихоокеанский регион: РЫНКИ СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО СТРАНАМ, 2017-2019 (МИЛЛИОН ДОЛЛАРОВ)
ТАБЛИЦА 72 ASIA PACIFIC, ДОЛЛ.
14.2.1 КИТАЙ
14.2.1.1 Сегмент автосимуляторов, который станет лидером на рынке
ТАБЛИЦА 73 КИТАЙ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЬСТВА, ПО ВИДУ АВТОМОБИЛЕЙ, 2017-2019 гг. (МЛН ДОЛЛ. США) МИЛЛИОНОВ)
14.2.2 ЯПОНИЯ
14.2.2.1 Присутствие ключевых OEM-производителей, которые, как ожидается, будут стимулировать рынок
ТАБЛИЦА 75 ЯПОНИЯ: РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЬСТВА, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 гг. (МЛН ДОЛЛ. США) )
14.2.3 ИНДИЯ
14.2.3.1 Государственные субсидии частным учебным заведениям для продвижения на рынок
ТАБЛИЦА 77 ИНДИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЬСТВА, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 78 ИНДИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЯ , 20202025 (МИЛЛИОН ДОЛЛАРОВ)
14.2.4 ЮЖНАЯ КОРЕЯ
14.2.4.1 Расширение внедрения передовых технологий и инноваций для стимулирования рынка
ТАБЛИЦА 79 ЮЖНАЯ КОРЕЯ: РЫНОК СИМУЛЯТОРОВ ДВИЖЕНИЯ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 80 ЮЖНАЯ КОРЕЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ТИП АВТОМОБИЛЯ, 2020-2025 (МЛН. ДОЛЛАРОВ)
14.2.5 ОСТАЛЬНАЯ АЗИЯ-ТИХООКЕАНСКАЯ РЕСПУБЛИКА
ТАБЛИЦА 81 REST OF ASIA PACIFIC: РЫНОК СИМУЛЯТОРОВ ДЛЯ ДВИЖЕНИЯ, ПО ВИДАМ ТРАНСПОРТНЫХ СРЕДСТВ, 20172019 ГОД (МИЛЛИОН ДОЛЛ. ТИП АВТОМОБИЛЯ, 2020-2025 (МЛН. ДОЛЛАРОВ)
14.3 ЕВРОПА
ТАБЛИЦА 83 ЕВРОПА: РЫНОК ДВИЖУЩИХСЯ СИМУЛЯТОРОВ, ПО СТРАНАМ, 2017-2019 (МИЛЛИОН ДОЛЛ. управлять рынком
ТАБЛИЦА 85 ФРАНЦИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 гг. (МЛН ДОЛЛ. США)
ТАБЛИЦА 86 ФРАНЦИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020-2025 гг. (МЛН ДОЛЛ. США)
14.3.2 ГЕРМАНИЯ
14.3.2.1 Присутствие инновационных OEM-производителей для продвижения рынка
ТАБЛИЦА 87 ГЕРМАНИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДУ АВТОМОБИЛЕЙ, 2017-2019 (МЛН. ДОЛЛАРОВ)
ТАБЛИЦА 88 ГЕРМАНИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020-2025 гг. (МЛН. Долл. США)
(МЛН. Долл. США)
14.3.3 ИСПАНИЯ
14.3.3.1 Рост производства коммерческих автомобилей для продвижения рынка
ТАБЛИЦА 89 ИСПАНИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 гг. (МЛН ДОЛЛ. США) МИЛЛИОН ДОЛЛАРОВ США)
14.3.4 ИТАЛИЯ
14.3.4.1 Растущее внедрение функций ADAS для продвижения рынка
ТАБЛИЦА 91 ИТАЛИЯ: РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЬСТВА, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США) )
14.3.5 UK
14.3.5.1 Популярность автомобилей премиум-класса с высококлассными функциями для выхода на рынок
ТАБЛИЦА 93 ВЕЛИКОБРИТАНИЯ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 94 Великобритания: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЯ, 2020-2025 (МЛН. ДОЛЛАРОВ)
14.3.6 ОСТАЛЬНАЯ ЕВРОПА
ТАБЛИЦА 95 ОСТАЛЬНАЯ ЕВРОПА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДУ АВТОМОБИЛЕЙ, 2017-2019 (МЛН. ДОЛЛАРОВ)
ТАБЛИЦА 96 ОТДЫХ ЕВРОПЫ: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020–2025 гг. (МИЛЛИОН ДОЛЛАРОВ США)
14,477 58 СЕВЕРНАЯ АМЕРИКА: ОБЗОР РЫНКА СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ
ТАБЛИЦА 97 СЕВЕРНАЯ АМЕРИКА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО СТРАНАМ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 98 СЕВЕРНАЯ АМЕРИКА: РЫНОК СИМУЛЯТОРОВ ВОЖДЕНИЯ, К 2020 ГОДУ4.1 США
14.4.1.1 Строгие правила безопасности для продвижения рынка
ТАБЛИЦА 99 США: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДУ АВТОМОБИЛЕЙ, 2017-2019 (МИЛЛИОНЫ ДОЛЛАРОВ США)
ТАБЛИЦА 100 США: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020-2025 гг. 14.4.2 КАНАДА
14.4.2.1 Растущий спрос на функции безопасности и удобства для выхода на рынок
ТАБЛИЦА 101 КАНАДА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США) 20202025 (МИЛЛИОН ДОЛЛАРОВ)
14.4.3 МЕКСИКА
14.4.3.1 Для увеличения производства грузовиков потребуется обучение безопасному вождению
ТАБЛИЦА 103 МЕКСИКА: РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЬСТВА, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 гг. (МЛН ДОЛЛ. США)
(МЛН ДОЛЛ. США)
14,5 REST OF THE WORLD
ТАБЛИЦА 105 СТРОКА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО СТРАНАМ, 2017-2019 гг. (МЛН ДОЛЛ. США)
ТАБЛИЦА 106 СТРОКА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО СТРАНАМ, 2020–2025 гг. (МЛН ДОЛЛ.5.1 БРАЗИЛИЯ
14.5.1.1 Постепенный технологический рост для стимулирования рынка
ТАБЛИЦА 107 БРАЗИЛИЯ: РЫНОК ДВИЖЕНИЯ СИМУЛЯТОРОВ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 гг. (МЛН ДОЛЛ. США)
ТАБЛИЦА 108 БРАЗИЛИЯ: РЫНОК СИМУЛЯТОРОВ ВОДИТЕЛЬСТВА, ТИП АВТОМОБИЛЕЙ, 2020-2025 ГГ. 14.5.2 ИРАН
14.5.2.1 Увеличение инвестиций ведущих производителей оригинального оборудования для продвижения на рынке
ТАБЛИЦА 109 ИРАН: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДАМ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛ. США)
ТАБЛИЦА 110 ИРАН: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОДИТЕЛЕЙ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020-2025 (МИЛЛИОН ДОЛЛАРОВ США)
14.5.3 ОСТАЛЬНАЯ ЧАСТЬ
ТАБЛИЦА 111 ОСТАЛЬНАЯ ЧАСТЬ: РЫНОК СИМУЛЯТОРОВ ДВИЖЕНИЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2017-2019 (МЛН ДОЛЛАРОВ США)
ТАБЛИЦА 112 ОСТАВЛЕНИЕ РЫНКА: РЫНОК СИМУЛЯТОРОВ ДЛЯ ВОЖДЕНИЯ, ПО ВИДУ АВТОМОБИЛЕЙ, 2020-2025 гг. (МЛН ДОЛЛАРОВ США)
15 РЕКОМЕНДАЦИИ РЫНКОВ И РЫНКОВ (Страница № — 162)
15.1 ЕВРОПА БУДЕТ ОСНОВНЫМ РЫНОКОМ СИМУЛЯТОРОВ ВОЖДЕНИЯ
15.2 РАСШИРЕННЫЕ СИМУЛЯТОРЫ ДВИЖЕНИЯ ЯВЛЯЮТСЯ КЛЮЧОМ ДЛЯ АВТОМОБИЛЬНОГО РЫНКА В ГОДЫ
15.3 ЗАКЛЮЧЕНИЕ
16 КОНКУРЕНТНЫЙ ЛАНДШАФТ (Страница № — 164)
16.1 ОСНОВА ОЦЕНКИ РЫНКА
РИСУНОК 59 ОСНОВА ОЦЕНКИ РЫНКА
16.2 ОБЗОР
РИСУНОК 60 КЛЮЧЕВЫЕ СОБЫТИЯ ВЕДУЩИХ ИГРОКОВ РЫНКА, 20172020 ГОД
16.3 АНАЛИЗ АКЦИЙ, 2019
16.4 РЕЙТИНГОВЫЙ АНАЛИЗ ДЛЯ DRIVING SIMULATOR MARKET
РИСУНОК 62 РЕЙТИНГОВЫЙ АНАЛИЗ РЫНКА, 2019
16.5 КОНКУРЕНТНЫЙ СЦЕНАРИЙ
16.5.1 ЗАПУСК НОВЫХ ПРОДУКТОВ
ТАБЛИЦА 113 ЗАПУСКИ НОВЫХ ПРОДУКТОВ, 20182020 ГОД
16.5.2 СЛИЯНИЯ И ПРИОБРЕТЕНИЯ, 2018
16.5.377 ПАРТНЕРСТВО / СОГЛАШЕНИЯ / СОГЛАШЕНИЯ / СОГЛАШЕНИЯ 115 ДОГОВОРЫ НА ПОСТАВКИ / СОТРУДНИЧЕСТВО / СОГЛАШЕНИЯ, 20172020
16. 5.4 РАСШИРЕНИЯ
5.4 РАСШИРЕНИЯ
ТАБЛИЦА 116 РАСШИРЕНИЯ, 20182020
16.6 КАРТА КОНКУРЕНТНОГО ЛИДЕРСТВА (ОСНОВНЫЕ УЧАСТНИКИ ИГРОКОВ)
16.6.1 ЗВЕЗДЫ
16.6.2 НОВЫЕ ЛИДЕРЫ
16.6.3 ПЕРВАЗИВНЫЙ
16.6.4 УЧАСТНИКИ
РИС. ПОРТФЕЛЬ
РИСУНОК 64 АНАЛИЗ ПОРТФЕЛЯ ПРОДУКТОВ ЛУЧШИХ ИГРОКОВ РЫНКА СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ
16.8 ПРЕВОСХОДСТВО В СТРАТЕГИИ БИЗНЕСА
РИСУНОК 65 ПРЕВОСХОДСТВО В СТРАТЕГИИ БИЗНЕСА ТОП-ИГРОКОВ ВЕДУЩИЙ РЫНОК СИМУЛЯТОРОВ ДЛЯ ПРОФЕССИОНАЛЬНОГО ОБУЧЕНИЯ
16.9 ПОБЕДИТЕЛИ VS. ХВОСТЫ
ТАБЛИЦА 117 ПОБЕДИТЕЛЕЙ VS. ХВОСТОВЫЕ СИМУЛЯТОРЫ
16.10 КАРТА КОНКУРЕНТНОГО ЛИДЕРСТВА ДЛЯ ПОСТАВЩИКОВ СИМУЛЯТОРОВ ВОЖДЕНИЯ
РИСУНОК 66 ГЛОБАЛЬНЫЙ СИМУЛЯТОР ВОЖДЕНИЯ: КАРТА КОНКУРЕНТНОГО ЛИДЕРСТВА, 2019 г.
17 ПРОФИЛИ КОМПАНИИ (№ страницы — 179)
(Обзор бизнеса, продуктовые предложения, разработки и MnM View) *
17.1 КЛЮЧЕВЫЕ ИГРОКИ
17.1.1 CRUDEN B.V
17.1.2 CASSIDIAN
17.1.3 СИСТЕМА СИМУЛЯТОРА TECKNOTROVE PVT. LTD
17.1.4 ГРУППА ECA
РИСУНОК 67 ГРУППА ECA: ОБЗОР КОМПАНИИ
17.1.5 ADACEL TECHNOLOGIES LTD.
РИСУНОК 68 ADACEL TECHNOLOGIES LTD .: ОБЗОР КОМПАНИИ
17.1.6 TRANSURB
17.1.7 EDISER
17.1.8 CORYS
17.1.9 SHRAIL
17.1.10 IPG AUTOMOTIVE
17.1.11 OKTAL SYDAC
17.1.12 VI-GRADE
17.1.13 ENVIRONMENTAL TECTONICS CORPORATION (ETC)
РИСУНОК 69 ETC: ОБЗОР КОМПАНИИ
ТАБЛИЦА 118 ETC: ПРЕДЛАГАЕМЫЕ ПРОДУКТЫ 119 ETC: ТАБЛИЦА
КОНТРАКТЫ
17.1.14 L3 HARRIS TECHNOLOGIES
РИСУНОК 70 L3 HARRIS TECHNOLOGIES: ОБЗОР КОМПАНИИ
ТАБЛИЦА 120 L3 HARRIS TECHNOLOGIES: ПРЕДЛАГАЕМЫЕ ПРОДУКТЫ
ТАБЛИЦА 121 L3 HARRIS TECHNOLOGIES: КОНТРАКТЫ / 17 СЛИЯНИЯ
.1.15 FAAC INC. (ПОД НАПРАВЛЕНИЕМ AROTECH CORPORATION)
РИСУНОК 71 FAAC / AROTECH: ОБЗОР КОМПАНИИ
ТАБЛИЦА 122 FAAC / AROTECH: ПРЕДЛАГАЕМЫЕ ПРОДУКТЫ
ТАБЛИЦА 123 FAAC / AROTECH: ПРИОБРЕТЕНИЯ / СОГЛАШЕНИЯ / ИНВЕСТИЦИИ
17. 1.16 SIMFOR 124
1.16 SIMFOR 124
/ ПРЕДЛАГАЕМЫЕ УСЛУГИ
17.1.17 SIM-ФАКТОР
ТАБЛИЦА 125 SIM-ФАКТОР: ПРЕДЛАГАЕМЫЕ ПРОДУКТЫ / УСЛУГИ
ТАБЛИЦА 126 SIM-ФАКТОР: КОНТРАКТЫ / ПРОЕКТЫ
* Подробная информация об обзоре бизнеса, предложениях продуктов, разработках и мнениях может не быть получена в случае отсутствия в списке компании.
17.2 ДРУГИЕ КЛЮЧЕВЫЕ ИГРОКИ
17.2.1 СЕВЕРНАЯ АМЕРИКА
17.2.1.1 Ford
17.2.1.2 General Motors
17.2.1.3 Virage Simulation
17.2.1.4 WAYMO
17.2.1.5 Mechanical Simulation Corporation
17.2.2 EUROPE
17.2.2.1 Daimler
17.2.2.2 BMW
17.2.2.3 Rexroth
17.2.2.4 Volkswagen
17.2.2.5 Volvo
17.2.2.6 AImotive
17.2.2.7 CARLA
17.2.2.8 AB Dynamics
17.2.2.9 XPI Simulation
17.2.2.10 rFpro
17.2.3 ASIA PACIFIC
17.2. 3.1 Toyota
17.2.3.2 Nissan
17.2.3.3 CVEDIA
17.2.3.4 Honda
17.2.4 REST OF THE WORLD
17.2.4.1 Cognata
18 ПРИЛОЖЕНИЕ (Номер страницы — 213)
18.1 ОСНОВНАЯ ИНФОРМАЦИЯ ДЛЯ ЭКСПЕРТОВ ОТРАСЛИ
18.2 РУКОВОДСТВО ДЛЯ ОБСУЖДЕНИЯ
18.3 ИНФОРМАЦИОННЫЙ МАГАЗИН: ПОРТАЛ ПОДПИСКИ НА РЫНКЫ И РЫНКОВ 18,5
18,5 ДОСТУПНО ДОСТУПНО ДОСТУПНО ДОПОЛНИТЕЛЬНО НАСТРОЙКА 904.6
PW 2532 Использование симулятора вождения автомобиля при реабилитации и оценке вождения пациентов после травм
Abstract
Способность справляться со сложными дорожными ситуациями является сложной задачей.Транспортировка на велосипеде в качестве пешехода или безопасное и эффективное управление автомобилем требует навыков обращения, соответствующего ощущения звуковых и визуальных импульсов и соответствующей быстрой реакции. Во всех обществах право на управление автомобилем обеспечивается образованием водителей и стандартизированным тестом. Но когда острое заболевание, такое как инсульт или травма, влияет на чувства или способность управлять автомобилем, не существует стандартизованных тестов с гарантированным качеством или проверенных тестов. Несколько исследований показывают, что обычные критерии валидности (достоверность, воспроизводимость, приемлемость и т. Д.)) выполняется для тренажеров вождения. Поскольку тестирование навыков вождения в компьютерном симуляторе в основном не представляет риска — это дает возможность разработать методы индивидуального ведения пациентов с временным пониженным функциональным состоянием, например, с переломами нижних конечностей.
Несколько исследований показывают, что обычные критерии валидности (достоверность, воспроизводимость, приемлемость и т. Д.)) выполняется для тренажеров вождения. Поскольку тестирование навыков вождения в компьютерном симуляторе в основном не представляет риска — это дает возможность разработать методы индивидуального ведения пациентов с временным пониженным функциональным состоянием, например, с переломами нижних конечностей.
Метод Программное обеспечение симулятора вождения было протестировано в переносном модуле в университетской поликлинике. Тестовый маршрут включал в себя разные темы (обгон кемпера на узкой дороге, приближение велосипедов, неожиданный пешеходный переход, внезапная остановка «раздражение других участников дорожного движения», проезжающие грузовики по шоссе в сильный дождь и вечерний свет).
Результаты В отличие от предыдущих пилотных маршрутов, все 45 тестировщиков, кроме четырех, прошли маршрут. Ни у кого не было водной болезни. Время в пути составляло от 3 до 12 минут на прохождение маршрута. Приверженность точному вождению варьировалась с возрастом (например, не наезжать на пешеходов или велосипеды), и большая часть пожилых людей и женщин испытывала трудности при проезде автофургона по узкой дороге). Пользовательская оценка четко указала на необходимость предварительной адаптации к регулярному вождению, прежде чем возникнут «запланированные» нарушения.
Заключение Даже короткие тесты вождения на симуляторе могут выявить различия между водителями, что указывает на потенциальную роль в будущих допустимых воспроизводимых тестах на вождение и последующей реабилитации пациентов
Frontiers | AR DriveSim: иммерсивный симулятор вождения для исследования Head-Up Display с дополненной реальностью
Введение
Когда-то являясь источником избранных академических и государственных лабораторий, дополненная реальность (AR) теперь применяется во многих контекстах и предоставляется с помощью множества аппаратных технологий. Успехи были задокументированы, например, в отношении мобильной AR для смартфонов (DüNser et al., 2012; Shea et al., 2017), AR на базе планшетов в классах (Bower et al., 2014), пространственной AR в архитектуре (Tonn et al., 2008), а также носимые на голове AR в военных и медицинских целях (Shen et al., 2013; Gans et al., 2015). Однако, невзирая на портативную дополненную реальность, вполне возможно, что самой большой пользовательской базой дополненной реальности вскоре станут водители автомобилей, использующие прозрачные автомобильные проекционные дисплеи (HUD) для просмотра как позиционированного на экране 2D, так и конформного трехмерного контента AR.
Успехи были задокументированы, например, в отношении мобильной AR для смартфонов (DüNser et al., 2012; Shea et al., 2017), AR на базе планшетов в классах (Bower et al., 2014), пространственной AR в архитектуре (Tonn et al., 2008), а также носимые на голове AR в военных и медицинских целях (Shen et al., 2013; Gans et al., 2015). Однако, невзирая на портативную дополненную реальность, вполне возможно, что самой большой пользовательской базой дополненной реальности вскоре станут водители автомобилей, использующие прозрачные автомобильные проекционные дисплеи (HUD) для просмотра как позиционированного на экране 2D, так и конформного трехмерного контента AR.
Действительно, недавно мы стали свидетелями возобновления интереса к использованию HUD при вождении, отчасти из-за коммерциализации технологий AR следующего поколения. Производители автомобилей начинают внедрять технологии AR HUD (86 моделей в США предлагали HUD в 2018 году), а маркетинговые команды настаивают на более продвинутых пользовательских интерфейсах AR HUD. К 2020 году HIS Automotive прогнозирует, что будет продано 9,1 миллиона HUD.
Более того, в самом ближайшем будущем мы ожидаем увеличения поля обзора AR HUD, позволяющего размещать информацию во многих местах; от фиксированных положений лобового стекла до конформной графики, которая перцептивно привязана к реальным объектам.В те же сроки мы ожидаем увеличения числа полуавтономных транспортных средств, где водители должны по-прежнему обращать внимание на как на дорожную сцену, так и на системную информацию (вероятно, предоставляемую через AR HUD), создавая идеальный шторм для потенциально опасных и отвлекающих интерфейсов AR HUD.
Хотя AR HUD следующего поколения обеспечит принципиально новый опыт вождения, в настоящее время мы не знаем, как эффективно проектировать и оценивать пользовательские интерфейсы (UI) в этой области. С новыми AR HUD, способными отображать изображения на больших площадях с разной глубиной, визуальное и когнитивное разделение между графическими и реальными визуальными стимулами будет все труднее определять количественно. По мере того, как мы движемся к широкому использованию HUD AR следующего поколения на транспорте, нам необходимо лучше понимать, как управлять дизайном пользовательского интерфейса, который не просто поверх среды , а вместо этого является интегрированной частью среды .
По мере того, как мы движемся к широкому использованию HUD AR следующего поколения на транспорте, нам необходимо лучше понимать, как управлять дизайном пользовательского интерфейса, который не просто поверх среды , а вместо этого является интегрированной частью среды .
Без новых исследовательских возможностей исследователям и практикам HUD UI остается основывать дизайн и оценку HUD UI на текущем (и устаревшем) понимании традиционных автомобильных информационных систем. Общие методы оценки дисплея в автомобиле были разработаны на основе данных, собранных в автомобилях в начале 2000-х годов (Administration NHTS, 2013), и недавние исследования показывают, что эти методы оценки имеют ограниченную применимость к AR HUD (Smith et al., 2016). Таким образом, когда мы приступаем к разработке и проектированию новых дисплеев AR HUD, мы также должны развивать наше понимание эффектов AR HUD на визуальное внимание и производительность водителя. В пространстве дизайна, которое предоставляет принципиально разный пользовательский опыт, мы должны задать вопрос: « Как пользовательские интерфейсы AR HUD, которые обязательно визуально интегрированы в высокодинамичное пространство основных задач, влияют на производительность драйвера? ”Симуляторы вождения обеспечивают метод быстрой итерации дизайна AR HUD в реалистичных сценариях вождения без опасности или затрат на дорожные испытания.
С этой целью в данной статье рассказывается о нашем опыте создания относительно недорогого полномасштабного симулятора вождения, предназначенного для изучения влияния использования AR HUD на производительность и поведение водителя. В оставшейся части документа подробно описывается техническая реализация аппаратного и программного обеспечения, после чего следует пользовательское исследование, демонстрирующее полезность симулятора вождения, и в заключение излагаются уроки, извлеченные из наших многолетних усилий по созданию и тестированию симулятора вождения с AR HUD.
Сопутствующие работы
Чтобы изучить возможности моделирования вождения для разработки и оценки пользовательского интерфейса дополненной реальности, мы кратко рассмотрим исследования, проводимые на человеке, которые включали различный набор (1) аппаратного обеспечения симулятора, (2) оптических прозрачных дисплеев дополненной реальности и (3) программного обеспечения для реализовать конформную графику для интерфейсов водитель-автомобиль.Для получения дополнительной информации о моделировании вождения в целом (например, о современных технологиях, приложениях, возможностях и ограничениях) см. Подробное руководство (Fisher et al., 2011).
Что касается точности моделирования вождения (т. Е. Визуальных стимулов, управления транспортным средством и движения), в эмпирических исследованиях приложений AR использовался широкий спектр оборудования для моделирования вождения, в зависимости от решаемых исследовательских вопросов. Настройки с самым низким уровнем точности часто связаны с комбинацией настольных компьютеров, мониторов и игровых контроллеров (Neurauter, 2005; Kim and Dey, 2009; Weinberg et al., 2011; Charissis et al., 2013; Ким и др., 2013; Тран и др., 2013; Politis et al., 2014; Шарфи и Шинар, 2014 г .; Типпи и др., 2014). Например, Шарфи и Шинар (2014) создали прототип системы улучшения видимости AR для вождения в ночное время, которая выделяет маркеры полосы движения с помощью настольного компьютера, игровых контроллеров DEXXA и монитора размером 126 × 60 см, и обнаружили, что расширенные края дороги положительно влияют на водителей. уверенность и рабочая нагрузка при снижении их способности обнаруживать неожиданные препятствия.Другие исследователи использовали симуляторы вождения средней точности, которые обычно состоят из стационарной реальной кабины автомобиля с проекционными экранами на стену (Tonnis and Klinker, 2006; Caird et al., 2008; Plavšic et al., 2009; Olaverri-Monreal et al. , 2012; Saffarian et al., 2013; Schall et al., 2013; Wai-Tat et al. , 2013; Bolton et al., 2015). Fu et al. провели пользовательское исследование на симуляторе вождения с кабиной реального автомобиля GM Saturn на фиксированной базе (Wai-Tat et al., 2013). Пользовательское исследование показало, что предложенное AR предупреждение о лобовом столкновении улучшило ходовые качества, но вызывало рискованное поведение при вождении, особенно среди молодых водителей.Несколько пользовательских исследований было проведено в симуляторе вождения с высокой точностью воспроизведения с использованием реальных автомобильных кабин, основанных на движении, с проекционными экранами с широким полем обзора, автомобильными дисплеями для зеркал и дисплеями центральной консоли (Medenica et al., 2011; Lorenz et al. ., 2014). Например, Medenica et al. (2011) оценили удобство использования трех навигационных средств в высококачественной кабине реального автомобиля, установленной на подвижной базе, которая способна имитировать движение транспортного средства для торможения и ускорения. Пользовательское исследование показало преимущества конформного навигационного средства AR, показывающего виртуальный маршрут, парящий над дорогой, по сравнению с традиционными навигационными средствами просмотра карты или улиц, отображаемыми на дисплее центральной консоли.Наконец, SILAB (WIVW, 2019), коммерчески доступный симулятор вождения, поддерживает гибкий, широкий диапазон точности моделирования от настольных систем с игровыми входами управления до многоканальных проецируемых сцен с реальными транспортными средствами, размещенными на движущихся платформах. Подобно нашей работе, представленной здесь, SILAB поддерживает физиологические измерения, видеозахват водителя и пассажиров под произвольными углами, отслеживание взгляда, протоколы соединения в реальном времени (такие как TCP / IP, UDP и шина CAN), а также поддержку интеграции вторичных задач. .Из материалов, доступных в Интернете, неясно, было ли успешно интегрировано отдельное оборудование AR HUD в SILAB. Однако вполне вероятно, что описанная инфраструктура поддержит такое начинание.
, 2013; Bolton et al., 2015). Fu et al. провели пользовательское исследование на симуляторе вождения с кабиной реального автомобиля GM Saturn на фиксированной базе (Wai-Tat et al., 2013). Пользовательское исследование показало, что предложенное AR предупреждение о лобовом столкновении улучшило ходовые качества, но вызывало рискованное поведение при вождении, особенно среди молодых водителей.Несколько пользовательских исследований было проведено в симуляторе вождения с высокой точностью воспроизведения с использованием реальных автомобильных кабин, основанных на движении, с проекционными экранами с широким полем обзора, автомобильными дисплеями для зеркал и дисплеями центральной консоли (Medenica et al., 2011; Lorenz et al. ., 2014). Например, Medenica et al. (2011) оценили удобство использования трех навигационных средств в высококачественной кабине реального автомобиля, установленной на подвижной базе, которая способна имитировать движение транспортного средства для торможения и ускорения. Пользовательское исследование показало преимущества конформного навигационного средства AR, показывающего виртуальный маршрут, парящий над дорогой, по сравнению с традиционными навигационными средствами просмотра карты или улиц, отображаемыми на дисплее центральной консоли.Наконец, SILAB (WIVW, 2019), коммерчески доступный симулятор вождения, поддерживает гибкий, широкий диапазон точности моделирования от настольных систем с игровыми входами управления до многоканальных проецируемых сцен с реальными транспортными средствами, размещенными на движущихся платформах. Подобно нашей работе, представленной здесь, SILAB поддерживает физиологические измерения, видеозахват водителя и пассажиров под произвольными углами, отслеживание взгляда, протоколы соединения в реальном времени (такие как TCP / IP, UDP и шина CAN), а также поддержку интеграции вторичных задач. .Из материалов, доступных в Интернете, неясно, было ли успешно интегрировано отдельное оборудование AR HUD в SILAB. Однако вполне вероятно, что описанная инфраструктура поддержит такое начинание.
Для дисплеев AR большинство исследователей имитировали AR HUD, представляя графику AR непосредственно в сцене вождения (без физического отображения AR; Caird et al., 2008; Kim and Dey, 2009; Plavšic et al., 2009; Charissis and Papanastasiou, 2010; Medenica et al., 2011; Dijksterhuis et al., 2012; Олаверри-Монреаль и др., 2012 г .; Ким и др., 2013, 2016; Saffarian et al., 2013; Schall et al., 2013; Вай-Тат и др., 2013; Lorenz et al., 2014; Politis et al., 2014; Sharfi and Shinar, 2014), в то время как некоторые устанавливали собственные прототипы (Tonnis and Klinker, 2006; Langlois, 2013; Tran et al., 2013), вторичный рынок c или головные дисплеи внутри симуляторов вождения (Sawyer et al., 2014; Типпи и др., 2017). В целом, исходя из нашего опыта, интеграция графики непосредственно в сцену вождения (с помощью компьютерной графики или видео) не обеспечивает такого же адаптивного и / или когнитивного переключения (Gabbard et al., 2019), что делает отдельный дисплей AR; важный компонент для исследования, цель которого — достоверно изучить влияние AR HUD на визуальное внимание водителя. Более того, самодельные AR HUD (например, использующие планшеты и полупрозрачные комбайнеры) могут страдать от ореолов и других визуальных артефактов, которые могут повлиять на результаты пользовательских исследований, если при их создании не будет уделено особого внимания.
Kim et al. (2013) смоделировали HUD послепродажного обслуживания, представив виртуальный аппаратный форм-фактор HUD (поле зрения 24 × 8 °) с полупрозрачным предупреждением о прямом столкновении AR и предупреждением о слепых зонах через виртуальный дисплей.Schall et al. (2013) смоделировали полный HUD лобового стекла для предупреждения о столкновении в дополненной реальности, напрямую выделяя дорожные опасности с помощью виртуальных боксов, интегрированных в сцену вождения. Тоннис и Клинкер (2006) создали прототип собственного HUD, используя объединитель и небольшой проекционный экран для графики AR, отделенный от большого проекционного экрана на стене для сцены вождения. Точно так же Лаубер и Батц (2013) смоделировали проекционный дисплей с помощью ЖК-дисплея и зеркала объединителя с прозрачностью 70%, чтобы сравнить фиксированное на экране представление скорости, ограничения скорости, предупреждения о столкновении и базовой навигационной информации с носимым на голове AR презентация через Vuzix StarTM 1200 HM.Pfannmueller et al. (2015) использовали макет контактного аналогового проекционного дисплея (cHUD), чтобы представить графику AR поверх видеопроекции сцен вождения, чтобы изучить различные концепции отображения навигации AR. Хотя деталей не хватает, cHUD выглядит похожим на другие, которые используют планшет или монитор, отражаются через полупрозрачный комбайнер (в отличие от коммерческих дисплеев AR на голове или на голове). Хотя эта система обеспечивает быстрый метод оценки концепций дизайна AR HMI, она не поддерживает ручное управление и, похоже, не поддерживает исследование конформной графики AR.
Точно так же Лаубер и Батц (2013) смоделировали проекционный дисплей с помощью ЖК-дисплея и зеркала объединителя с прозрачностью 70%, чтобы сравнить фиксированное на экране представление скорости, ограничения скорости, предупреждения о столкновении и базовой навигационной информации с носимым на голове AR презентация через Vuzix StarTM 1200 HM.Pfannmueller et al. (2015) использовали макет контактного аналогового проекционного дисплея (cHUD), чтобы представить графику AR поверх видеопроекции сцен вождения, чтобы изучить различные концепции отображения навигации AR. Хотя деталей не хватает, cHUD выглядит похожим на другие, которые используют планшет или монитор, отражаются через полупрозрачный комбайнер (в отличие от коммерческих дисплеев AR на голове или на голове). Хотя эта система обеспечивает быстрый метод оценки концепций дизайна AR HMI, она не поддерживает ручное управление и, похоже, не поддерживает исследование конформной графики AR.
Хорошее дорожное исследование Wiesner et al. (2017) использует коммерческий прототип проекционного дисплея в реальном транспортном средстве, чтобы понять работу водителя с дизайном интерфейса AR в реальных условиях вождения. В ходе работы были интегрированы высокоточная глобальная навигационная спутниковая система (GNSS) и система горизонта передовых систем помощи водителю (ADAS) для изучения эффективности «AR-подобных» визуализаций предстоящих перекрестков, съездов с автомагистралей и кольцевых развязок. Авторы не конформно интегрируют графику AR в сцену отчасти потому, что графика представляет собой будущее событие; таким образом, тесная визуальная интеграция явно не гарантируется.Авторы используют отслеживание взгляда, и результаты, касающиеся влияния AR на поведение водителя, аналогичны нашим результатам, представленным здесь: а именно: презентация на основе AR HUD помогает водителям дольше держать взгляд в направлении дороги, а короткие взгляды — в сторону дороги. комбинация приборов и немного более длинные средние взгляды на HUD (по сравнению с дисплеем, направленным вниз).
Конформная графика в симуляторах вождения была реализована в основном путем прямой интеграции графики AR в компьютерную сцену вождения без отдельных дисплеев (Caird et al., 2008; Ким и Дей, 2009 г .; Плавшич и др., 2009; Хариссис и Папанастасиу, 2010; Medenica et al., 2011; Ким и др., 2013; Schall et al., 2013; Вай-Тат и др., 2013; Lorenz et al., 2014; Politis et al., 2014; Шарфи и Шинар, 2014 г.). В нескольких найденных в литературе примерах конформной графики AR используется Wizard of Oz (Bolton et al., 2015), обнаружение объектов на основе компьютерного зрения (Wu et al., 2009) и связь между программным обеспечением для моделирования вождения и приложением AR ( Tran et al., 2013).Лоренц и др. (2014) разработали прототип предупреждений AR для полос движения, ограниченных из-за чрезвычайных ситуаций, представив зеленый безопасный путь или красный опасный путь путем интеграции конформной графики в сцену вождения, используя тот же конвейер рендеринга, что и среда вождения. Болтон и др. (2015) представили водителям, казалось бы, автономный сценарий вождения, включая предварительно записанные навигационные стрелки, видимые через оптический прозрачный HUD, которые соответствуют определенному сценарию вождения, который был запущен исследователями вручную.Wu et al. (2009) проигрывали кадры вождения перед симулятором вождения и накладывали ограничивающие рамки AR через лобовое стекло, чтобы выделить обнаруженные дорожные знаки с помощью технологии компьютерного зрения. Наконец, Tran et al. разработал возможность представления конформной графики в реальном времени посредством связи с программным обеспечением для моделирования вождения, которое передавало информацию о геометрии дороги, других участниках дорожного движения и сигналах светофора. Они представили графику AR для визуализации прогнозируемого пути встречного транспорта для помощи при левом повороте.Однако подробностей о конфигурации системы и архитектуре программного обеспечения не сообщалось (Tran et al. , 2013).
, 2013).
Проведение исследований AR с конформной графикой AR на дороге очень сложно из-за сложности отслеживания положения и ориентации водителя. На первый взгляд, это может показаться простым предложением, учитывая современные возможности GPS с кинематикой в реальном времени, акселерометры, возможности визуального наблюдения и LIDAR-зондирования. Однако небольшие вибрации и неровности, вызываемые дорожным покрытием, шинами и подвеской транспортного средства, на самом деле затрудняют четкую привязку конформной графики к сцене вождения.Проблема усугубляется тем фактом, что любые незначительные отклонения в движениях графики (относительно реальных объектов) легко обнаруживаются зрительной системой человека, эффективно предоставляя потенциальные преимущества конформной графики, сбивающей с толку, отвлекающей или сбивающей с толку. До тех пор, пока такая способность «фиксировать» конформную графику AR в ближнем и дальнем вождении не будет установлена, критически необходимо использование симуляторов вождения, разработанных специально для изучения влияния графики AR на производительность и поведение водителя, таких как наша система, представленная здесь. .Следует отметить, что, хотя эти возможности технического отслеживания развиваются, мы все еще можем исследовать, как в моделировании, так и на дороге, графические дизайны AR, которые более терпимы к ошибкам отслеживания и оценки позы. Например, Wiesner и Klinker (2017) представляют визуализацию AR для навигации, которая направлена на устранение ошибок в текущем повороте GPS, полагаясь исключительно на расстояние до следующего поворота. Интересно, что их результаты показывают, что точность конформной графики не может быть единственным определяющим фактором эффективности, поскольку их конструкция AR «паруса», требующая более низкой точности с помощью традиционной системы GNSS, была предпочтительнее конструкции конформной стрелки высокой точности.
В целом, при обзоре литературы становится ясно, что несколько исследователей занимались и продолжают участвовать в значимых исследованиях AR HUD с использованием множества аппаратных, программных и экспериментальных методологий. Судя по нашему обзору и насколько нам известно, наша AR DriveSim уникальна тем, что обеспечивает несколько синергетических возможностей, включая: полностью иммерсивную кабину транспортного средства и проекционную систему, физиологический захват и измерения (например, поведения глаз и водителя), индивидуальные электроника для связи и управления транспортным средством, синхронизация потоков данных, связанных с динамикой транспортного средства, интерфейсом AR и водителем / пассажирами, автономное вождение, обратная связь по усилию на рулевое колесо, интегрированный послепродажный проекционный дисплей и возможность полного рендеринга цветная, анимированная, конформная AR графика.
Судя по нашему обзору и насколько нам известно, наша AR DriveSim уникальна тем, что обеспечивает несколько синергетических возможностей, включая: полностью иммерсивную кабину транспортного средства и проекционную систему, физиологический захват и измерения (например, поведения глаз и водителя), индивидуальные электроника для связи и управления транспортным средством, синхронизация потоков данных, связанных с динамикой транспортного средства, интерфейсом AR и водителем / пассажирами, автономное вождение, обратная связь по усилию на рулевое колесо, интегрированный послепродажный проекционный дисплей и возможность полного рендеринга цветная, анимированная, конформная AR графика.
Симулятор вождения для исследования интерфейса AR
В этом разделе мы сообщаем подробности многолетних усилий по созданию симулятора вождения с дополненной реальностью (далее именуемого AR DriveSim ). С самого начала мы установили несколько руководящих принципов. (1) Вставьте реальную кабину транспортного средства в пространство трехмерной проекции с широким полем обзора (рис. 1). То есть мы хотели создать высокую степень погружения, как описано Уитмером и Зингером, то есть «психологическое состояние, характеризующееся восприятием себя как окружающего, включенного в среду, которая обеспечивает непрерывный поток стимулов и взаимодействий с ней, и взаимодействует с ней. переживания », а также высокая степень иллюзии места (Witmer and Singer, 1998; Skarbez et al., 2017). (2) Используйте фактический HUD для отображения графики AR (и другой), а не просто проецируйте или интегрируйте «смоделированную графику AR» в сцену вождения. (3) Используйте гибкость в дизайне испытательного стенда, чтобы позволить проводить множество различных типов исследований на людях с акцентом на использование AR HUD. (4) Предоставьте исследователям возможность собрать набор зависимых показателей для характеристики характеристик и поведения человека, включая показатели производительности водителя, визуальное внимание и модели взгляда, объективные показатели умственной нагрузки и измерения движений головы, рук и ног на основе видео. В следующих разделах описываются ключевые компоненты нашего AR DriveSim в надежде, что этот вклад поможет другим развить аналогичные возможности.
В следующих разделах описываются ключевые компоненты нашего AR DriveSim в надежде, что этот вклад поможет другим развить аналогичные возможности.
Рисунок 1 . Полукабина Mini Cooper с высоты птичьего полета с участником и экспериментатором. Хотя представленная здесь работа сосредоточена на возможностях вождения на основе компьютерной графики, испытательный стенд также поддерживает альтернативные формы обучения вождению (например, видео).
Оборудование AR DriveSim
По своей сути AR DriveSim — это проекционная моноскопическая виртуальная среда, в которой пользователи «перемещают» окружающую среду как водитель автомобиля.В нашей системе VR-контент предоставляется через MiniSim, программное обеспечение для трехмерного симулятора вождения, разработанное в исследовательском центре National Advanced Driving Simulator при Университете штата Айова. MiniSim 2.2 выполняется на настольном компьютере с процессором Intel Core i7, работающим на частоте 3,70 ГГц, с 64 гигабайтами ОЗУ DDR4 под управлением Windows 10. Сцена движения визуализируется графической картой PNY NVIDIA Quadro P4000 и проецируется через DisplayPort @ 1,920 × 1,200 с использованием три (деформированных и смешанных) проектора Epson Powerlite Pro G6900WU NL.В этой аппаратной конфигурации MiniSim обеспечивает плавный рендеринг до 1 миллиона треугольников со скоростью 60 кадров в секунду. Мы направляем эти три основных вида вперед через оборудование Tripp Lite, чтобы отразить видовые экраны на трех настольных мониторах (рис. 2B), чтобы обеспечить обзор и станцию управления экспериментатором.
Рисунок 2 . Логическое расположение 7 экранов AR DriveSim с разрешением и физическими подключениями отмечено (A) ; Пульт управления экспериментатора (B) и аннотированный вид изнутри кабины Mini Cooper (C) .Обратите внимание, что дисплеи AR HUD и Center Stack подключены к отдельному компьютеру, предназначенному для представления пользовательского интерфейса.
В качестве проекционной поверхности мы установили экран профессионального уровня от Draper со шнурками и втулками, высотой 93 дюйма и длиной 360 дюймов, на заказной U-образной изогнутой раме (радиус 73 дюйма). В проекционном экране используется гладкая серая поверхность просмотра Contrast Grey XH800E, обеспечивающая улучшенный цветовой контраст и уровни черного, что особенно полезно для нашего приложения, в котором используются три проектора с высокой светоотдачей.Рама состоит из катаных алюминиевых труб диаметром 1½ дюйма как сверху, так и снизу, с квадратными алюминиевыми трубными стойками размером 1 × 1, расположенными примерно через каждые 2 фута.
Центральным элементом нашего симулятора вождения является передняя часть автомобиля Mini Cooper 2014 года выпуска. Автомобиль был подарен крупной страховой компанией, которая любезно сняла двигатель и трансмиссию перед доставкой. После доставки мы протестировали электрические компоненты, а затем полностью разобрали автомобиль, включая всю отделку, сиденья, подушки безопасности, компоненты приборной панели и многое другое, пока не осталась только рама.Задняя половина кабины была снята и выброшена, а верхняя половина оставшейся кабины была временно снята. Две половины кабины были перемещены в лабораторию, где задняя часть нижней половины была установлена на раме с роликами (передняя часть нижней половины поддерживалась оригинальными шинами). Верхняя половина была повторно прикреплена, и затем мы снова собрали все ранее снятые компоненты (от поддерживающих подконструкций до готовых деталей отделки) и протестировали повторно собранные электрические системы автомобиля.
Затем мы включили дополнительные дисплеи для поддержки зеркал бокового обзора, зеркал заднего вида, цифровой приборной панели и гибких дисплеев центральной консоли. В частности, мы добавили три 7-дюймовых USB-ЖК-видеомонитора Lilliput (800 × 480), подключенных через USB-концентраторы с питанием и программное обеспечение DisplayLink, которые служат зеркалами бокового обзора и настраиваемой цифровой приборной панелью (рис. 2). Мы разместили 32-дюймовый широкоэкранный ЖК-монитор ASUS PB328Q за кабиной (и соответственно отображали контент), чтобы обеспечить естественное использование оптического зеркала заднего вида.Монитор заднего вида подключается через DisplayPort с разрешением 1280 × 720 для оптимизации производительности в трех основных проекциях вперед. Чтобы усилить иллюзию пространства, мы добавили сабвуфер потребительского уровня и динамики в моторном отсеке для воспроизведения звука в реальном времени, например шума двигателя.
2). Мы разместили 32-дюймовый широкоэкранный ЖК-монитор ASUS PB328Q за кабиной (и соответственно отображали контент), чтобы обеспечить естественное использование оптического зеркала заднего вида.Монитор заднего вида подключается через DisplayPort с разрешением 1280 × 720 для оптимизации производительности в трех основных проекциях вперед. Чтобы усилить иллюзию пространства, мы добавили сабвуфер потребительского уровня и динамики в моторном отсеке для воспроизведения звука в реальном времени, например шума двигателя.
Наконец, мы добавили набор дополнительного оборудования, помогающего фиксировать поведение участников. Набор из трех скрытых сетевых камер-обскур Axis P1204 3,7 мм mini HD был размещен (1) на зеркале заднего вида (обращенным к лицу участников), (2) в пространстве для ног водителя (фиксируя поведение ног, например, наведение на педаль тормоза) , и (3) в центре потолка кабины, указывая на руки участников на рулевом колесе.Камеры подключены к NOLDUS Observational Suite, который обеспечивает синхронизацию видео с трех IP-камер, а также прямой цифровой видеопоток сцены вождения с компьютера drivsim. AR DriveSim также содержит беспроводные очки для отслеживания движения глаз SMI ETG 60 Гц и Tobii Pro Glasses 2 100 Гц с перспективной камерой сцены, которая позволяет нам тщательно оценивать распределение взгляда водителей; особенно важная возможность для понимания того, как дизайн интерфейса AR HUD влияет на визуальное внимание водителей.Мы фиксируем физиологические показатели рабочей нагрузки водителя с помощью пульсометра Mio LINK для отслеживания вариабельности сердечного ритма (Meshkati, 1988) и задачи обнаружения реакции RedScientific для обеспечения объективной оценки остаточной способности внимания с использованием парадигмы двойной задачи (Sala et al. , 1995).
Система управления и интерфейса симулятора
Хотя существует множество способов подключения физических органов управления в кабине к программному обеспечению для моделирования, мы решили декодировать выходящую шину сети контроллеров (CAN) Mini Cooper, чтобы можно было использовать существующие высокоскоростные потоки данных управления. Шина CAN — это протокол последовательной передачи данных, разработанный корпорацией BOSCH для смягчения проблем, связанных с передачей данных и обменом между контроллерами, датчиками, приборами и другими электрическими компонентами транспортного средства (Ran et al., 2010). Используя двунаправленную связь по шине CAN, можно, например, считывать положение рулевого колеса, положения педалей и нажатия кнопок, а также управлять спидометром, тахометром и другими элементами из моделирования в режиме реального времени.Хотя существует множество онлайн-ресурсов, описывающих принципы архитектуры CAN-шины и широкий спектр областей применения, идентификаторы CAN-шины, зависящие от производителя, гораздо сложнее найти, поскольку они обычно не публикуются. Поскольку нам не удалось найти идентификаторы CAN-шины для Mini Cooper 2014 года, мы использовали комбинацию готовых бортовых диагностических сканирующих инструментов, Arduino CAN bus Shield, осциллограф и профессиональные диагностические компьютеры для автомобилей, чтобы перепроектировать систему. набор идентификаторов CAN-шины, полезных данных переменной длины и значений для критически важных функций Mini Cooper.
Шина CAN — это протокол последовательной передачи данных, разработанный корпорацией BOSCH для смягчения проблем, связанных с передачей данных и обменом между контроллерами, датчиками, приборами и другими электрическими компонентами транспортного средства (Ran et al., 2010). Используя двунаправленную связь по шине CAN, можно, например, считывать положение рулевого колеса, положения педалей и нажатия кнопок, а также управлять спидометром, тахометром и другими элементами из моделирования в режиме реального времени.Хотя существует множество онлайн-ресурсов, описывающих принципы архитектуры CAN-шины и широкий спектр областей применения, идентификаторы CAN-шины, зависящие от производителя, гораздо сложнее найти, поскольку они обычно не публикуются. Поскольку нам не удалось найти идентификаторы CAN-шины для Mini Cooper 2014 года, мы использовали комбинацию готовых бортовых диагностических сканирующих инструментов, Arduino CAN bus Shield, осциллограф и профессиональные диагностические компьютеры для автомобилей, чтобы перепроектировать систему. набор идентификаторов CAN-шины, полезных данных переменной длины и значений для критически важных функций Mini Cooper.
Чтобы облегчить обмен данными между Mini Cooper и ПО MiniSim, мы интегрировали одноплатный компьютер (SBC), микроконтроллер и настраиваемую плату управления для сбора и отправки сообщений шины CAN, аналоговых напряжений от нескольких настраиваемых линейных потенциометров и нескольких датчиков OEM. (Рисунок 3).
Рисунок 3 . Основные вычислительные компоненты нашего AR DriveSim обмениваются данными через UDP (желтый). Набор стандартных и нестандартных микроконтроллеров (коричневый) передает управляющие входы, считываемые с шины CAN (зеленый) и других датчиков, на компьютер AR DriveSim (оранжевый).Плата управления (коричневая) дополнительно управляет двигателем постоянного тока для обеспечения обратной связи по усилию на рулевом колесе. Отдельный компьютер (синий) отображает трехмерную графику на AR HUD, синхронизируя положение своей виртуальной камеры в реальном времени с компьютером AR DriveSim. Набор элементов управления экспериментатора (черный) помогает координировать эксперименты.
Набор элементов управления экспериментатора (черный) помогает координировать эксперименты.
Микроконтроллер используется для управления несложными и часто повторяющимися задачами, такими как получение сообщений шины CAN и считывание аналоговых напряжений с различных датчиков.Мы использовали Teensy 3.5 из-за встроенной функции приемника CAN-шины, большого количества цифровых и аналоговых входов / выходов общего назначения и гибкости нескольких протоколов для связи с другими системами. Более сложные функции интерфейсной системы управляются SBC на базе Linux, который принимает параметры от микроконтроллера, форматирует и масштабирует их по мере необходимости и, наконец, составляет и отправляет данные в виде пакетов UDP по проводной сети Ethernet на компьютер MiniSim. Первоначально мы использовали Arduino Yún в качестве SBC, но из-за проблем с последовательной связью мы перешли на Intel Galileo Gen2.
Teensy использует интерфейс шины CAN для доступа к данным управления, таким как данные о положении рулевого колеса, нажатия кнопок и т. Д. Мы установили три линейных потенциометра для измерения положения педали акселератора, педали тормоза и положения автоматического переключения передач. Каждый из этих параметров линейно масштабируется до однобайтовых значений и передается по последовательному соединению между Teensy и Galileo. После запуска скрипт управления python, хранящийся на Galileo, начинает обмен рукопожатием с Teensy, чтобы установить общее время для схемы связи.После начала связи между двумя устройствами SBC определяет время передачи, передавая один байт в Teensy. В ответ Teensy передает все значения рулевого управления и положения, полученные от датчиков и шины CAN, через двухпроводное последовательное соединение со скоростью 115 200 бит / с. После получения Galileo линейно изменяет масштаб этих значений в соответствии со спецификациями MiniSim и упаковывает их в пакет UDP. Тестирование показывает, что эта система настраиваемого интерфейса надежно передает 100 пакетов в секунду. Хотя мы официально не измеряли сквозную задержку, мы ожидаем, что она будет минимальной, учитывая (1) MiniSim анализирует входящие данные UDP с частотой 60 Гц и (2) наше собственное эмпирическое наблюдение.
Хотя мы официально не измеряли сквозную задержку, мы ожидаем, что она будет минимальной, учитывая (1) MiniSim анализирует входящие данные UDP с частотой 60 Гц и (2) наше собственное эмпирическое наблюдение.
Teensy взаимодействует с CAN-шиной Cooper с помощью библиотеки FlexCAN (Pimentel and Fonseca, 2004) и обработчика, который извлекает необходимую информацию во время приема каждого кадра CAN-шины. Как только мы узнали идентификатор кадра с необходимыми параметрами и структуру этих кадров, стало очень легко собрать необходимую информацию по мере ее поступления по шине.Линейные потенциометры, используемые для измерения положения педалей акселератора и тормоза, подключены к педалям через кабели управления в пластиковой оболочке (мы не смогли расшифровать положение педали в CANBUS). Потенциометры питаются от 3,3 В и считываются со стандартным 13-битным разрешением Teensy. Пружинный возврат педалей OEM дает преимущества нашей системе, так как также возвращает потенциометры в их «нулевое» положение. Поскольку фактический диапазон механического движения педалей и потенциометров может зависеть от трения и других факторов; наша процедура аналогового считывания обновляет минимальное и максимальное значение считывания для обеих педалей и использует эти значения для сопоставления текущего считывания со значением от 0 до 255 для передачи на Galileo.Подобно настройке педали, кабель управления в пластиковой оболочке соединяет автоматическое переключение передач с линейным потенциометром, на который также подается напряжение 3,3 В. Мы использовали предварительно измеренные значения напряжений, связанных с различными передачами автоматической коробки передач, для определения передачи положения. в программе аналогового чтения.
Чтобы усилить иллюзию места, создаваемую симулятором вождения, мы изменили функцию рулевого управления с электроусилителем Mini Cooper, чтобы обеспечить обратную связь по усилию, а также возврат к центру рулевого колеса, как это происходит в обычном автомобиле. Чтобы поддержать эти непредвиденные обстоятельства сенсомоторного двигателя, мы разработали оптоизолированную Н-мостовую схему полевого МОП-транзистора, которая позволяет щеточному двигателю постоянного тока, который соединен с рулевым валом, перемещать рулевое колесо по желанию. Изменяя рабочий цикл широтно-импульсной модуляции, мы можем изменять интенсивность силовой обратной связи в зависимости от моделируемой скорости транспортного средства. Эта схема H-моста была построена на специально разработанной печатной плате, которую мы называем «платой управления». Плата управления также содержит Teensy, силовую схему, разъем для подключения CAN-шины, а также разъемы для линейных потенциометров и любых будущих датчиков и электроники.
Чтобы поддержать эти непредвиденные обстоятельства сенсомоторного двигателя, мы разработали оптоизолированную Н-мостовую схему полевого МОП-транзистора, которая позволяет щеточному двигателю постоянного тока, который соединен с рулевым валом, перемещать рулевое колесо по желанию. Изменяя рабочий цикл широтно-импульсной модуляции, мы можем изменять интенсивность силовой обратной связи в зависимости от моделируемой скорости транспортного средства. Эта схема H-моста была построена на специально разработанной печатной плате, которую мы называем «платой управления». Плата управления также содержит Teensy, силовую схему, разъем для подключения CAN-шины, а также разъемы для линейных потенциометров и любых будущих датчиков и электроники.
Запуск и остановка сценария python на Galileo выполняется из графического пользовательского интерфейса (GUI) на основе python, доступного на компьютере MiniSim, который использует защищенную оболочку для выдачи команд Galileo. Процессы управления выполняются в фоновом режиме Galileo для обеспечения устойчивости в случае тайм-аута сеанса защищенной оболочки или других проблем. Предоставляя простой графический интерфейс для уровня связи, все исследователи, независимо от компьютерной подготовки, могут легко запускать и контролировать обмен данными между Mini Cooper, его микроконтроллерами и программным обеспечением для моделирования.
Мы также добавили гоночный руль и педали Logitech G27 не только для помощи в разработке и тестировании сценариев вождения, но, что более важно, для проведения исследований в области автономного вождения Wizard of Oz (например, как AR HUD может помочь в переключении между ручным и ручным управлением). автономное вождение). Вышеупомянутый графический интерфейс Python позволяет исследователям переключаться между элементами управления Mini Cooper (например, участник, управляющий вручную) и игровым контроллером (например, экспериментатор, управляющий как автономный агент).
Реализация проекционного дисплея AR
Аппаратное обеспечение HUD AR
Чтобы поддержать наши исследования влияния интерфейсов AR на производительность и поведение драйверов, мы интегрировали проекционный дисплей Pioneer Carrozzeria Cyber Navi Head-up. Cyber Navi — это оптический прозрачный лазерный дисплей с фиксированным фокусным расстоянием (~ 3 м), предназначенный для установки на внутренней крыше вместо солнцезащитного козырька. Мы установили HUD на направляющую вдоль внутренней крыши Mini Cooper, чтобы его можно было расположить на разном расстоянии (8–24 дюйма) от точки зрения водителя. По словам производителя, Cyber Navi поддерживает горизонтальное поле обзора ~ 17 °, что согласуется с нашим опытом калибровки изображения HUD для сцены вождения MiniSim.
Cyber Navi — это оптический прозрачный лазерный дисплей с фиксированным фокусным расстоянием (~ 3 м), предназначенный для установки на внутренней крыше вместо солнцезащитного козырька. Мы установили HUD на направляющую вдоль внутренней крыши Mini Cooper, чтобы его можно было расположить на разном расстоянии (8–24 дюйма) от точки зрения водителя. По словам производителя, Cyber Navi поддерживает горизонтальное поле обзора ~ 17 °, что согласуется с нашим опытом калибровки изображения HUD для сцены вождения MiniSim.
В качестве лазерного дисплея Cyber Navi может воспроизводить яркие изображения со скоростью 12 000 кд / м 2 и имеет датчик внешней освещенности и возможность автоматического затемнения. Однако автоматическое затемнение создало проблемы с цветопередачей в нашей среде моделирования; при низком уровне освещенности (например, в темной комнате симулятора) HUD не только тускнеет, но и имеет сильное смещение цвета в сторону зеленого. То есть белая графика кажется зеленой при слабом освещении. Чтобы исправить это, мы установили один светодиод на потенциометр прямо перед датчиком освещенности HUD.Когда светодиод горит, HUD настраивается, создавая более яркие изображения, что приводит к хорошей цветопередаче. Затем мы применили к линзам тонировку с пропусканием видимого света 20%, чтобы лучше согласовать яркость графики HUD с проецируемой сценой вождения.
Программное обеспечение AR HUD
Вообще говоря, HUD может отображать видеоисточник VGA с любого VGA-совместимого компьютера и программного обеспечения. Это удобно, поскольку мы успешно провели исследования пользователей с использованием PowerPoint для визуализации 2D-текста и символов, фиксированных на экране, для оценки отвлечения внимания водителя и визуального внимания с различными положениями HUD и сложностью пользовательского интерфейса (Smith et al., 2016, 2017). Как показано на рисунке 3 (синим цветом), наш симулятор содержит микроконтроллер Arduino и CAN-Shield, который анализирует нажатия кнопок на рулевом колесе с шины CAN и направляет их на компьютер AR HUD, имитируя подключенную USB-клавиатуру. Кнопки на рулевом колесе Mini Coopers удобно расположены, позволяя использовать левую и правую кнопки направления (плюс две дополнительные кнопки, расположенные с правой стороны рулевого колеса). При таком расположении исследователи могут быстро разрабатывать эксперименты, которые представляют серию визуальных стимулов и используют до 10 различных нажатий кнопок для изучения проблем интерфейса HUD, таких как навигация по меню, ручное согласование выбора пользовательского интерфейса, самостоятельные психофизические исследования и многое другое.
Кнопки на рулевом колесе Mini Coopers удобно расположены, позволяя использовать левую и правую кнопки направления (плюс две дополнительные кнопки, расположенные с правой стороны рулевого колеса). При таком расположении исследователи могут быстро разрабатывать эксперименты, которые представляют серию визуальных стимулов и используют до 10 различных нажатий кнопок для изучения проблем интерфейса HUD, таких как навигация по меню, ручное согласование выбора пользовательского интерфейса, самостоятельные психофизические исследования и многое другое.
Однако для конформной графики AR HUD требуется более сложная программная платформа, состоящая из компонентов управления трафиком данных, преобразования данных и графа сцены. В нашей текущей системе мы реализуем эти компоненты как таблицу маршрутов UDP MiniSim, скрипт Python промежуточного слоя и граф сцены X3D / JavaScript, соответственно.
Данные передаются между компонентами в виде пакетов UDP, содержащих информацию, как определено таблицей маршрутов MiniSim — настраиваемая конструкция, которая позволяет нам указать, какие переменные MiniSim упаковываются и транслируются по сети с частотой 60 Гц (как определено скоростью вывода MiniSim).Чтобы представить графику AR, мы передаем смоделированное положение и ориентацию автомобиля MiniSim внутри сцены. Эти данные затем используются для постоянного обновления положения и ориентации камеры X3D.
В зависимости от характера данных, выводимых контроллером трафика, может потребоваться преобразование для соответствия спецификации компонента графа сцены. Чтобы соответствовать спецификациям позы X3D, координаты собственного автомобиля в MiniSim должны быть инвертированы по оси z. Значения рыскания, тангажа и крена MiniSim затем используются для генерации одного вектора вращения и величины.Эти преобразованные данные используются для сопоставления позы точки обзора X3D с позой водителя в симуляции. Это означает, что представление конформной графики AR HUD определяется исключительно позой точки обзора X3D относительно сцены MiniSim.
Определение времени поведения графики AR HUD осуществляется с помощью триггерных событий Road Pad MiniSim, которые, когда их проезжают участники, генерируют сетевой трафик данных для конкретного события. Например, в исследовании пользователей, представленном ниже, триггеры дорожных подушек создают пакеты данных, которые информируют программное обеспечение AR HUD о том, что водитель столкнулся с расширенным сегментом движения, и, следовательно, начинают визуализацию желаемой графики AR HUD.Данные, выбранные для информирования о поведении конформной графики, могут быть адаптированы в качестве механизма обратного вызова для запуска процедур, определенных в компоненте графа сцены AR HUD. Таблица маршрутов MiniSim также может быть настроена для отправки данных о местоположении и ориентации ближайших 20 динамических объектов сцены (например, других транспортных средств, пешеходов и т. Д.). Такую информацию также можно использовать для визуализации конформной графики в реальном времени, например, визуальных предупреждений пешеходов и меток для ближайшего движения.
Для справки, следует отметить, что для исследования, представленного ниже, мы смогли визуализировать конформную графику AR HUD с использованием X3D на довольно небольшом компьютере: Intel i5 2400 с @ 2.5 ГГц, 4 ГБ оперативной памяти, Ubuntu 14.04 LTS, работающая графика процессора. Более сложные изображения AR HUD, будь то презентация или поведение, хорошо подходят для нового вычислительного и графического оборудования.
Калибровка AR HUD
Поскольку физическое положение HUD может потребоваться изменить, чтобы приспособиться к разной высоте водителя и положениям сиденья, важно выполнить процедуру калибровки для обеспечения точной перцепционной регистрации конформной графики в сцене вождения. Для этого участники сначала садятся на сиденье водителя и устанавливают сиденье в удобное положение.У нас есть участники выполнить грубое позиционирование объединителя AR HUD (который шарнирно закреплен вдоль верхнего края) таким образом, чтобы верхний и нижний края объединителя совпадали с подготовленным калибровочным изображением, проецируемым на изогнутый экран. Это гарантирует, что AR HUD правильно расположен по вертикали в сцене, чтобы он, например, перекрывал проезжую часть.
Это гарантирует, что AR HUD правильно расположен по вертикали в сцене, чтобы он, например, перекрывал проезжую часть.
Затем участники проверяют, правильно ли воспринимается конформная графика дополненной реальности. Для этого шага мы создали простой сценарий шоссе, содержащий видимый горизонт и четыре автомобиля, припаркованные в известных местах по обе стороны от шоссе.Программное обеспечение AR HUD рисует коробки вокруг каждой машины в соответствии с общей системой абсолютных координат. Кроме того, программное обеспечение рисует линии, соответствующие разметке полосы движения шоссе, до точки схождения, как показано в моделировании (рис. 4). Используя дополнительные элементы управления с клавиатуры, определенные в программном обеспечении AR HUD, для управления полем обзора, соотношением сторон, шагом точки обзора и положением точки обзора, мы можем быстро выровнять эту графику по отношению к их аналогам моделирования. Процедура калибровки неявно использует тенденцию каждого участника выравнивать дополненную графику и графику моделирования, используя свой доминирующий глаз, обеспечивая точные с точки зрения восприятия дополнения сцены вождения.
Рисунок 4 . Вид участника при калибровке трехмерной графики AR HUD путем просмотра тщательно размещенных трехмерных форм и линий перспективы, наложенных на статическую дорожную сцену с известной геометрией.
Исследование пользователей AR HUD
Назначение
После создания и доработки всех компонентов симулятора вождения мы провели пользовательское исследование, чтобы продемонстрировать исследовательские возможности испытательного стенда. Мы были особенно заинтересованы в сравнении традиционной графики в стиле 2D HUD с конформной графикой AR, поскольку большая часть работы в области AR направлена на изучение влияния конформной графики на производительность драйвера / оператора.
Автомобильные производители уже внедряют 2D-графику AR HUD с фиксированным экраном (т. е. графика отображается в фиксированном положении на экране HUD) в транспортных средствах на дорогах сегодня. Эти фиксированные на экране изображения используются для отображения различной информации, включая указания по навигации. Одной из областей, вызывающих большой интерес у производителей автомобилей, является возможность создания графики с географической привязкой, относящейся к миру, которая может быть «фиксированной» в одном месте в мире или динамической, движущейся относительно мира, но появляющейся как часть мира.Одним из наиболее распространенных вариантов использования этой относящейся к миру графики является навигация, поскольку подсказки в мире могут предоставить водителям информацию, которая поможет им перемещаться в сложных средах. Эти два типа графики используют одну и ту же технологию для передачи одинаковой информации (куда идти) разными способами. По этой причине наша цель в этом исследовании состояла в том, чтобы сравнить визуальное внимание, поведение при вождении и опыт при использовании двух разных типов навигационной графики AR HUD: относительно экрана и относительно мира, оба фиксированных в местоположении.
е. графика отображается в фиксированном положении на экране HUD) в транспортных средствах на дорогах сегодня. Эти фиксированные на экране изображения используются для отображения различной информации, включая указания по навигации. Одной из областей, вызывающих большой интерес у производителей автомобилей, является возможность создания графики с географической привязкой, относящейся к миру, которая может быть «фиксированной» в одном месте в мире или динамической, движущейся относительно мира, но появляющейся как часть мира.Одним из наиболее распространенных вариантов использования этой относящейся к миру графики является навигация, поскольку подсказки в мире могут предоставить водителям информацию, которая поможет им перемещаться в сложных средах. Эти два типа графики используют одну и ту же технологию для передачи одинаковой информации (куда идти) разными способами. По этой причине наша цель в этом исследовании состояла в том, чтобы сравнить визуальное внимание, поведение при вождении и опыт при использовании двух разных типов навигационной графики AR HUD: относительно экрана и относительно мира, оба фиксированных в местоположении.
Экспериментальный дизайн
Мы сравнили два различных состояния отображения навигации (рис. 5): конформная стрелка (Conformal) и стрелка, зафиксированная на экране (Screen-fixed). Конформная стрелка была отображена на HUD и выглядела так, как если бы она была на дороге и имела синий цвет. Приближаясь к повороту, участники «проезжали» стрелку, как если бы она была частью дороги. На экране фиксированные направления поворота отображаются с помощью двумерной стрелки, отображаемой на HUD, ориентированной влево или вправо, в зависимости от ситуации и вдохновленной текущими навигационными системами.Вертикальная часть стрелки на экране заполнялась по мере приближения участников к повороту, указывая расстояние до поворота.
Рисунок 5 . В пользовательском исследовании изучались два условия отображения HUD: конформная стрелка , интегрированная в дорожную сцену (вверху) , и закрепленная на экране стрелка , которая заполнялась по мере приближения водителей к повороту (внизу) . Для каждого из них исходное состояние графика появилось на расстоянии 392 футов от взаимодействия (левые панели) и исчезло после того, как участники пересекли перекрестки (правые панели).
Для каждого из них исходное состояние графика появилось на расстоянии 392 футов от взаимодействия (левые панели) и исчезло после того, как участники пересекли перекрестки (правые панели).
Методы
После одобрения исследования Наблюдательным советом технологического института штата Вирджиния мы набирали участников с помощью листовок, размещенных в кампусе, переданных преподавателям и рассылок по электронной почте. Кроме того, несколько участников попросили разрешения поделиться своим опытом участия с другими друзьями в этом районе, и некоторые люди решили участвовать на основе этих рекомендаций. Заинтересованные лица связались с исследователями по электронной почте, чтобы задать любые вопросы относительно исследования и, при желании, запланировать сеанс сбора данных.По прибытии в лабораторию участники согласились участвовать и вошли в симулятор вождения, где им были надеты очки для отслеживания взгляда и они отрегулировали сиденье в соответствии с их комфортом. Затем они провели ознакомительную поездку, чтобы освоиться с настройками симулятора вождения и динамикой автомобиля. Мы проинструктировали их двигаться со скоростью 30 миль в час и соблюдать все правила и нормы дорожного движения, включая светофоры. Если они превышали ограничение скорости более чем на 10%, подавался звуковой сигнал сирены, указывающий на то, что им необходимо замедлить движение.Ознакомительная поездка длилась как минимум 5 минут, пока они не указали, что им комфортно управлять транспортным средством-симулятором, а исследователи также подтвердили, что они могут сохранять контроль над транспортным средством при остановке, трогании с места, повороте и движении по прямой. После ознакомительной поездки мы откалибровали HUD по вертикали и горизонтали.
Участники ознакомились с условиями отображения навигации в серии поездок. Каждая поездка проходила в большом городе и включала восемь поворотов: четыре поворота вправо и четыре поворота влево, каждый из которых управлялся навигационной системой и длился от 6 до 12 минут.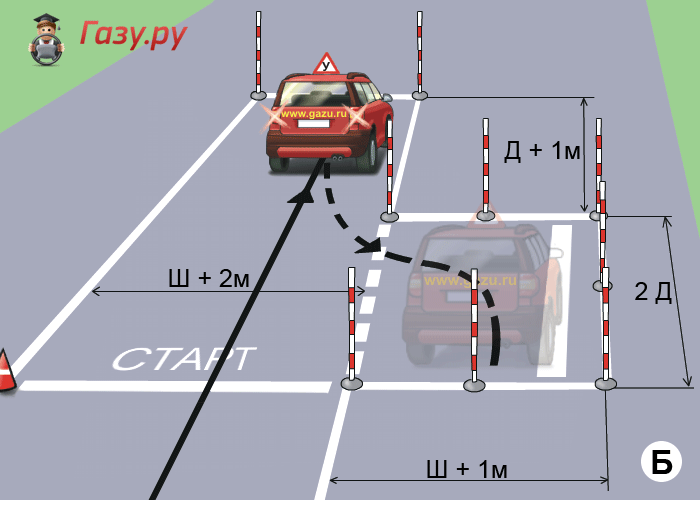 Различия в продолжительности во многом объяснялись индивидуальными различиями и рандомизированными моделями трафика. Кроме того, участникам было поручено следить за встречным и перекрестным движением при поворотах и движении по городу. Половина поворотов (два левых, два правых) проходила по перекрестку в составе взвода из восьми машин.
Различия в продолжительности во многом объяснялись индивидуальными различиями и рандомизированными моделями трафика. Кроме того, участникам было поручено следить за встречным и перекрестным движением при поворотах и движении по городу. Половина поворотов (два левых, два правых) проходила по перекрестку в составе взвода из восьми машин.
На протяжении всей поездки поведение взгляда и направление взгляда фиксировались с помощью очков слежения за глазами SensoMotoric Instruments (SMI); который записал звук, вид лицом вперед и местоположение взгляда для каждого участника.После сбора данных мы использовали аналитическое программное обеспечение SMI BeGaze 3.6.40 для анализа распределения фиксации участников с использованием вручную определенных областей интересов. Мы использовали Noldus Observation Suite для записи видео перспективной дорожной сцены независимо от направления взгляда участников. Эта видеозапись использовалась для определения рискованного поведения участников. После каждой поездки участники заполняли небольшую серию анкет, которые включали показатели рабочей нагрузки и удобства использования.
Мы собрали полные данные для 22 участников, все из которых имели водительские права в США более 1 года (в среднем 4.6 лет, максимум: 19 лет, минимум: 2 года). В исследовании приняли участие 13 мужчин (средний возраст 20,3 года) и девять женщин (средний возраст 20,4 года). В среднем участники проезжали 7918 миль в год.
Анализ и результаты
Мы провели линейную модель смешанных эффектов, которая позволила нам учесть индивидуальные различия участников как случайный эффект, как показано в de Bruin et al. (2008). Мы проанализировали ряд зависимых показателей рабочей нагрузки и удобства использования, взгляда, поведения при вождении и принятия риска.Для каждой зависимой меры мы подбираем нашу модель в JMP Pro 12 с учетом влияния независимых показателей (тип отображения, порядок, пол участника, направление поворота, наличие движения) и взаимодействия этих эффектов второго порядка. Поскольку это было предварительное исследование, в объем данной статьи входит только подробное обсуждение индивидуального влияния типа отображения на зависимые показатели.
Рабочая нагрузка и меры по удобству использования
Участники самостоятельно сообщили о рабочей нагрузке с помощью NASA-TLX (Hart and Staveland, 1988) после каждой поездки.Отображение навигации оказало существенное влияние на умственную потребность, усилия и общую оценку Raw TLX (среднее значение всех промежуточных оценок; см. Рисунок 6, Таблица 1). Дисплей с фиксированным экраном привел к меньшим умственным потребностям, усилиям и общей нагрузке, чем дисплей Conformal.
Рисунок 6 . Участники оценили промежуточные баллы NASA-TLX по шкале от 0 (низкий спрос) до 100 (высокий спрос). Среднее значение промежуточных баллов составило оценку Raw TLX.
Таблица 1 .Средние значения, стандартные отклонения (в скобках) и значения F- и p для дисперсионного анализа с повторными измерениями.
После воздействия каждого условия мы также собрали собственные данные по пяти критериям удобства использования: отвлечение, влияние дисплея на вождение, простота навигации, доверие и удобство просмотра (рисунок 7, таблица 1). Состояние дисплея оказало значительное влияние на удобство навигации, просмотра, доверия и впечатления от вождения участниками (Таблица 1). Тестирование Post hoc показало, что дисплей с фиксированным экраном дает более высокие оценки удобства использования для всех значительных различий.
Рисунок 7 . Участники оценили следующие утверждения по шкале от 0 (полностью согласен) до 100 (категорически не согласен): (1) «Я не нашел этот интерфейс отвлекающим». (2) «Использование этого интерфейса положительно сказалось на моем вождении». (3) «При использовании этого интерфейса было легко ориентироваться». (4) «Я доверял информации об этом интерфейсе». и (5) «Интерфейс был удобен для просмотра».
Поведение взгляда
Мы классифицировали области интереса (AOI) по местоположению взглядов участников и проанализировали AOI двумя способами.Первый анализ включал два AOI: на HUD и вне его. Цель этого различия — понять, насколько водители ограничивают свой взгляд только просмотром через HUD, а не сканированием вокруг сцены. Вторая схема кодирования AOI позволила нам лучше понять шаблоны сканирования участников в области, имеющие отношение к вождению (рисунок 8). Некоторые исследователи предложили более точные метрики кодирования, которые включают места на проезжей части, где вероятно возникновение опасностей, в дополнение к «демонстрационным» и «дорожным» взглядам (Seppelt et al., 2017). Однако включение относительной к миру графики в сцену проезжей части водителей может привести к тому, что конформная графика HUD обязательно будет перекрываться с дорогой, поэтому мы не сможем отделить взгляды, сфокусированные на графике HUD, от взглядов, сфокусированных через графику HUD и на дороге. Следовательно, эта схема кодирования AOI сегментировала HUD на более мелкие AOI, включая графику HUD, графику HUD и опасности на HUD. Графика HUD включала все фиксации, при которых водитель смотрел прямо на графику.Однако иногда изображение HUD перекрывало проезжую часть впереди и заставляло участников смотреть на места, смежные с изображением HUD. Эти взгляды были закодированы как «вокруг изображения HUD». Во время движения взгляд вокруг HUD может включать области интереса, такие как разметка полосы движения, опасности непосредственно перед водителем. Эти графические взгляды вокруг HUD также могут быть использованы для устранения окклюзии (например, чтобы убедиться, что за графикой нет опасностей). Поскольку HUD был расположен так, чтобы на проезжей части была наложена фиксированная и анимированная в мире графика, участники могли просматривать HUD, чтобы проверить движение или другие опасности.Таким образом, мы закодировали эти взгляды как «опасности на HUD». В дополнение к этим AOI, встроенным в HUD, мы также проанализировали контрольные взгляды на потенциальный перекрестный трафик, зеркала и другие полосы. Эти «опасности вне HUD» включали в себя все потенциальные опасности, которые можно было увидеть, не глядя через HUD. После тестов на нормальность мы регистрировали преобразованные данные всех переменных отклика глаз, хотя непреобразованные данные показаны на рисунке 8.
Эти «опасности вне HUD» включали в себя все потенциальные опасности, которые можно было увидеть, не глядя через HUD. После тестов на нормальность мы регистрировали преобразованные данные всех переменных отклика глаз, хотя непреобразованные данные показаны на рисунке 8.
Рисунок 8 . Процент фиксаций, назначенных каждому AOI, различается между конформными дисплеями и дисплеями с фиксированным экраном.Хотя нет идеального распределения по AOI, интересно отметить, что процентное соотношение различается, особенно между процентом времени, потраченного на просмотр и вокруг изображения HUD.
Conformal привел к значительно большей максимальной продолжительности взгляда на графику HUD, чем с фиксированным экраном. Conformal также приводил к более длительной средней продолжительности просмотра графического интерфейса HUD, чем фиксированный на экране. Кроме того, количество взглядов на графику HUD было значительно выше, когда участники использовали Conformal по сравнению с типом отображения с фиксированным экраном.Конформный был связан с более высоким процентом времени просмотра графики HUD, чем фиксированный на экране. Исправленный экран привел к большему проценту взглядов на графику HUD, чем Conformal. Не было значительной разницы между процентом времени, в течение которого участники смотрели на опасности вне HUD, опасности на HUD или на HUD в целом.
Таким образом, поскольку конформный дисплей ассоциировался с более длинными средними взглядами, более высокими максимальными взглядами, большим количеством взглядов и более высоким процентом времени, сосредоточенным конкретно на графике HUD, участники продемонстрировали тенденцию уделять больше визуального внимания конформной графике HUD, чем фиксированная на экране графика.Конформность также была связана с меньшим количеством времени на изучение области вокруг изображения HUD и отсутствием различий в опасностях на HUD или вне HUD, показывая, что повышенное визуальное внимание к конформной графике не обязательно влияло на поведение участников при сканировании опасностей.
Поведение при вождении
Мы проанализировали данные о вождении в течение всего времени, в течение которого каждая навигационная подсказка (конформная стрелка и фиксированная на экране стрелка) была видна на HUD (492 фута до каждого из восьми поворотов).Для каждого поворота мы рассчитывали соответствующие показатели поперечного, продольного и позиционного контроля для каждого испытания. Затем мы искали в каждом испытании моменты, когда скорость участника составляла 0,0 миль в час, и отмечали их как остановки. Для первой остановки после появления графика мы рассчитали расстояние от места остановки до начала перекрестка. Таблица 1 включает список зависимых поведенческих показателей вождения, и мы не обнаружили значительного влияния состояния дисплея на какие-либо показатели вождения.Кроме того, ни один из участников не пропускал повороты ни на одном из перекрестков.
Принятие риска
Используя видеозапись Noldus, мы проанализировали рискованное поведение участников, зафиксировав, сколько автомобилей из взвода из восьми автомобилей участники разрешили повернуть (0–8 автомобилей), прежде чем принять решение о повороте самостоятельно. Если участники поворачивались между двумя машинами взвода, мы также фиксировали размер (в футах) расстояния между этими двумя машинами взвода. Данные от четырех участников отсутствовали из-за человеческой ошибки, и поэтому мы смогли проанализировать рискованное поведение только 18 участников (из 22).Нам не удалось проанализировать дополнительные пять витков в конформном режиме и два поворота при фиксированном экране из-за сценария моделирования, но сочетание направлений поворота было довольно равномерным (34 L-конформных, 33 R-конформных, 36 L-экранных, 34 R-Screen-fixed). Условие отображения не повлияло на количество автомобилей, которым участники разрешили повернуть перед поворотом [X (1) 2 = 0,1728, p = 0,6776]. Из тех, которые использовали пропуски, условия отображения не повлияли на размер зазора, который выбрали участники. Таким образом, тип дисплея не оказал существенного влияния на рискованное поведение водителей, и ни один из участников не врезался в другое транспортное средство во время поворотов (или в любое другое время во время движения).
Таким образом, тип дисплея не оказал существенного влияния на рискованное поведение водителей, и ни один из участников не врезался в другое транспортное средство во время поворотов (или в любое другое время во время движения).
Обсуждение тематического исследования
В нашем пользовательском исследовании приняли участие 22 участника, которые при навигации в AR DriveSim испытали как конформные, так и фиксированные экраны дисплеи. В этом исследовании отображение с фиксированным экраном ассоциировалось с более низкой рабочей нагрузкой (измеряемой умственными потребностями, усилиями и общей рабочей нагрузкой) и более высоким удобством использования (измеряемым спросом, навигацией, доверием и просмотром), чем отображение Conformal.Разница в этих самооценках показывает, что конформная AR-графика не обязательно по своей сути улучшает пользовательский опыт, а пространственное размещение направленной графики на проезжей части дороги в некоторых случаях может вызвать большую рабочую нагрузку.
Не было различий в поведении при вождении или рискованном поведении, несмотря на то, что участники, использующие фиксированный на экране дисплей, уделяли меньше визуального внимания графике и, следовательно, по-видимому, уделяли больше визуального внимания другим элементам, имеющим отношение к задаче вождения.Отсутствие различий в поведении при вождении можно объяснить в подобном исследовании, потому что мы не включали события, которые были неожиданными или непредсказуемыми, в наши сценарии вождения, которые с большей вероятностью могут различать графику HUD. Неожиданные события (неожиданные или непредсказуемые) требуют быстрого реагирования, а водители, использующие конформные HUD с дополненной реальностью, особенно уязвимы для слепоты к изменениям или беспорядка на экране, который может мешать водителям, особенно перед лицом неожиданных событий, поскольку изменения на дисплее могут маскировать реальные изменения.Методы вождения не так чувствительны, как другие физиологические меры (Wierwille and Eggemeier, 1993), и распределение визуального внимания может быть ранним индикатором ухудшения способностей к вождению. Таким образом, такие показатели, как поведение взгляда, дают представление о дизайне дисплея, даже если показатели эффективности вождения не различаются. Независимо от причины повышенного распределения визуального внимания, эта работа предполагает, что мы должны проявлять осторожность при разработке AR HUD для транспортных средств.
Таким образом, такие показатели, как поведение взгляда, дают представление о дизайне дисплея, даже если показатели эффективности вождения не различаются. Независимо от причины повышенного распределения визуального внимания, эта работа предполагает, что мы должны проявлять осторожность при разработке AR HUD для транспортных средств.
Мы обнаружили различия в поведении взглядов у участников, которые смотрели на конформную демонстрацию чаще и в течение более длительных периодов времени.Возможно, что повышенное визуальное внимание, которое участники уделяли конформному отображению, было артефактом исследования, потому что размер изображения был больше в конформном состоянии. Тем не менее, участникам, возможно, также пришлось сосредоточиться на конформной графике в течение более длительного периода времени, чтобы проанализировать навигационное значение, когда оно прокручивалось от верхней части поля зрения дисплея, когда участники двигались вперед. Таким образом, возросший в последнее время интерес со стороны производителей автомобилей и исследователей к использованию конформной графики на AR HUD не обязательно является синонимом более безопасного поведения водителя и, в случае неправильного выполнения, также может отрицательно повлиять на пользовательский опыт.Эта работа показывает, что в некоторых сценариях фиксированная на экране графика может быть более эффективной, чем конформная, и поэтому идеально конформная графика не может быть решением для всех интерфейсов AR. Соблазн включить реалистичную конформную графику AR при разработке расширенных пользовательских интерфейсов AR может снизить производительность и негативно повлиять на поведение водителя. Однако необходимо провести гораздо больше работы, чтобы проверить ожидаемые преимущества конформной графики по сравнению с другими проектами проекционного интерфейса.Последующие исследования должны дополнительно изучить, как распределение визуального внимания к конформной графике AR HUD может быть вредным в случаях с другой геометрией дороги, участниками дороги и неожиданными / непредсказуемыми событиями.
AR DriveSim Обсуждение
Представленное здесь исследование пользователей является первой демонстрацией того, как мы можем использовать наш AR DriveSim для быстрого сравнения прототипов пользовательского интерфейса; в этом случае пользовательский интерфейс конформной голограммы AR для пользовательского интерфейса с фиксированным экраном, вдохновленный тем же визуальным элементом (т.е., стрелка) и дополнительно исследуйте, как эти пользовательские интерфейсы влияют на поведение и производительность драйвера. Возможности AR DriveSim, однако, позволяют и другим видам быстрого исследования дизайнов пользовательского интерфейса AR для вождения, которые в противном случае были бы гораздо более сложными, трудоемкими и / или опасными. Например, мы можем изучить, как дизайн пользовательского интерфейса может перемещаться в пространстве (например, анимированная конформная графика) или анимироваться на экране, или даже перемещаться между дорогой и экраном в зависимости от контекста.Обладая идеальной геометрией сцены, отслеживанием транспортных средств и знанием участников дорожного движения, мы можем исследовать пользовательские интерфейсы, прикрепленные к другим движущимся транспортным средствам, пешеходам и велосипедистам, не пытаясь организовать этих участников на испытательном стенде или отслеживать их в режиме реального времени. Мы можем изучить, сколько ошибок отслеживания можно допустить в пользовательском интерфейсе AR HUD на дороге или как аннотировать реальные ссылки, которые находятся за пределами поля зрения AR HUD. Точно так же мы можем изучить, как создавать пользовательские интерфейсы AR, которые могут сосуществовать в условиях интенсивного трафика, где может произойти окклюзия, и необходимо разрабатывать и тестировать творческие контекстно-зависимые конструкции.Оснастив фактическую кабину транспортного средства сенсорными устройствами (например, жестами, голосом и т. виртуальная смоделированная среда вождения с виртуализированной графикой AR HUD (например, из-за проблем, связанных с доступностью богатых тактильных сигналов, типичных для интерфейсов транспортных средств, и визуализации собственного тела участников в четко сформулированной и убедительной форме). Наконец, используя фактический оптический прозрачный HUD (вместо смоделированного или виртуального HUD), мы можем исследовать физиологические и когнитивные эффекты интеграции дисплеев AR со сценами вождения, такими как те, которые связаны с переключением контекста и переключением фокусного расстояния (Gabbard et al., 2019), что невозможно с симуляцией вождения на основе VR с имитацией графики AR. Короче говоря, AR DriveSim — это недорогой полномасштабный симулятор вождения со встроенным оптическим AR-дисплеем и возможностью количественной оценки влияния пользовательских интерфейсов AR на производительность и поведение водителя.Наш дизайн предоставляет уникальные и бесценные возможности для исследователей и дизайнеров пользовательского интерфейса AR HUD, которые невозможно встретить на дороге или в полном симуляторе на основе виртуальной реальности.
Наконец, используя фактический оптический прозрачный HUD (вместо смоделированного или виртуального HUD), мы можем исследовать физиологические и когнитивные эффекты интеграции дисплеев AR со сценами вождения, такими как те, которые связаны с переключением контекста и переключением фокусного расстояния (Gabbard et al., 2019), что невозможно с симуляцией вождения на основе VR с имитацией графики AR. Короче говоря, AR DriveSim — это недорогой полномасштабный симулятор вождения со встроенным оптическим AR-дисплеем и возможностью количественной оценки влияния пользовательских интерфейсов AR на производительность и поведение водителя.Наш дизайн предоставляет уникальные и бесценные возможности для исследователей и дизайнеров пользовательского интерфейса AR HUD, которые невозможно встретить на дороге или в полном симуляторе на основе виртуальной реальности.
Проектирование, сборка, подключение и программирование AR-DriveSim далось нелегко, поэтому мы предлагаем список уроков, извлеченных из этого процесса, которые могут быть полезны другим исследователям и практикам, стремящимся создать аналогичную киберфизическую AR испытательные стенды (будь то вождение или другие области приложений AR).
Что касается физического пространства для симулятора вождения, мы рекомендуем большие пространства по сравнению с меньшими; не менее 5 × 7 м.Во-первых, в более просторном помещении предусмотрены кабины большего размера, которые, в свою очередь, поддерживают более широкий диапазон размеров участников. Большие комнаты также могут лучше справляться с чрезмерным нагревом, выделяемым множеством необходимых компьютеров, дисплеев и проекторов. Это особенно важно, так как теплая комнатная температура может усугубить болезнь симулятора. В более просторных помещениях за кабиной можно разместить ЖК-мониторы для обслуживания оптических боковых зеркал и более реалистичного ощущения водителя. Более высокие потолки также обеспечивают большую гибкость при покупке и установке проекторов.Если возможно, убедитесь, что в физическом пространстве есть несколько электрических цепей и выделенная цепь для питания половины кабины. Если внутренний вентилятор кабины работает, будет чрезвычайно полезно иметь возможность запускать вентилятор на максимальной скорости, чтобы минимизировать укачивание, хотя для этого требуется значительный ток.
Если внутренний вентилятор кабины работает, будет чрезвычайно полезно иметь возможность запускать вентилятор на максимальной скорости, чтобы минимизировать укачивание, хотя для этого требуется значительный ток.
При поиске автомобиля для использования в качестве полукабины начните с идентификации автомобилей с хорошо задокументированными идентификаторами шины CAN. Это ускорит работу, необходимую для подключения кабины к программному обеспечению симулятора вождения.Кроме того, хотя было хорошей идеей потребовать снятия двигателя и трансмиссии перед доставкой, мы рекомендуем оставить блок управления двигателем в целости и сохранности, чтобы обеспечить доступ к дополнительным данным шины CAN. Наконец, если идентификаторы CAN-шины недоступны, не тратьте много времени на работу с простыми встроенными диагностическими считывателями, поскольку они предоставляют доступ к подмножеству общего трафика CAN-шины. Вместо этого одолжите или возьмите напрокат обычный автомобильный диагностический прибор в ремонтной мастерской.
Внутри физической кабины мы рекомендуем прокладывать основные кабели под обивкой и за ней, чтобы не только защитить кабели, но и улучшить визуальное представление места.То есть вы хотите, чтобы участники поверили, что они находятся в реальной машине за рулем, а не в электромобиле в лаборатории. Проложите кабели для дисплеев, IP-камер, связи и питания перед полной сборкой кабины. В кабине также должны быть регулируемые сиденья и надежный процесс позиционирования и калибровки HUD. Участники, которые чувствуют себя комфортно и имеют точное представление о контенте AR, получат данные более высокого качества.
Если возможно, расположите кабину так, чтобы участники, входящие в пространство симулятора вождения, входили со стороны водителя.Это избавляет участников от необходимости перемещаться по неизбежному набору имеющихся кабелей и оборудования. В связи с этим мы рекомендуем проявлять особую осторожность при прокладке кабелей, тщательно выбирая правильную длину и используя методы укладки кабелей.![]() Это поможет свести к минимуму опасность споткнуться для участников и экспериментаторов.
Это поможет свести к минимуму опасность споткнуться для участников и экспериментаторов.
Что касается программного обеспечения симулятора вождения, мы настоятельно рекомендуем исследователям избегать соблазна разработать собственное программное обеспечение для симулятора вождения, если само программное обеспечение не является желаемым вкладом.Полное программное решение для симулятора вождения включает в себя гораздо больше, чем графику виртуальной реальности, включая, например, автоматизированный сбор установленных SAE показателей вождения, интеграцию сложной динамики транспортного средства в реальном времени, удобные для пользователя графические инструменты создания сценариев и т. Д. Хотя MiniSim — это вариант, который мы использовали, доступны другие коммерческие варианты и варианты с открытым исходным кодом (например, STISIM и OpenDS).
Что касается программного обеспечения AR HUD, мы обнаружили, что делегирование задач трансформации (например,g., поза автомобиля MiniSim в позу X3D AR HUD) в Python помогает упростить экспериментальный исходный код X3D / Javascript, а также помогает в более общем плане с будущей переносимостью. Кроме того, хотя есть вероятные случаи, когда система координат относительно транспортного средства может быть полезной, мы обнаружили, что общая абсолютная система координат значительно упрощает реализацию для динамической графики AR HUD. Это верно, особенно в тех случаях, когда исследователи не обладают глубокими вычислительными навыками, потому что исследователи, разрабатывающие сценарии, могут указывать мировые координаты для программистов AR HUD для использования на стороне X3D / Javascript.Наконец, при анимации конформной графики AR HUD для сценариев пошаговой навигации мы обнаружили, что отдельные кривые Безье обеспечивают адекватное определение для одиночных поворотов и могут быть связаны вместе для определения более сложных условий.
Ограничения и дальнейшая работа
Несмотря на то, что компьютерному моделированию вождения присущ ряд ограничений, мы представляем лишь несколько ограничений, которые симулятор вождения накладывает на нашу способность проводить исследования AR HUD. Во-первых, было бы сложно провести исследование, связанное с влиянием реального освещения и смешивания цветов на использование HUD.Даже если бы мы могли сопоставить яркость, например, с ночным сценарием, было бы нетривиальным добавить блики от встречного транспорта и другие световые эффекты. Точно так же изучение возможности использования графики AR HUD на фоне вождения ограничено разрешением, яркостью, динамическим диапазоном и контрастностью проецируемой сцены вождения. Наш симулятор AR HUD также не подходит для изучения проблем, связанных с восприятием глубины, поскольку HUD с фиксированной фокальной плоскостью случайно попадает примерно на такое же расстояние, что и проецируемая сцена вождения.У нас также пока нет возможности артикулировать кабину и отображать подсказки на основе движения. В общем, основные ограничения ограничивают нашу способность изучать проблемы восприятия AR, связанные с использованием HUD на открытом воздухе. Такие исследования необходимо проводить во время движения по испытательной трассе или фиксировать в помещении с видом на улицу.
Во-первых, было бы сложно провести исследование, связанное с влиянием реального освещения и смешивания цветов на использование HUD.Даже если бы мы могли сопоставить яркость, например, с ночным сценарием, было бы нетривиальным добавить блики от встречного транспорта и другие световые эффекты. Точно так же изучение возможности использования графики AR HUD на фоне вождения ограничено разрешением, яркостью, динамическим диапазоном и контрастностью проецируемой сцены вождения. Наш симулятор AR HUD также не подходит для изучения проблем, связанных с восприятием глубины, поскольку HUD с фиксированной фокальной плоскостью случайно попадает примерно на такое же расстояние, что и проецируемая сцена вождения.У нас также пока нет возможности артикулировать кабину и отображать подсказки на основе движения. В общем, основные ограничения ограничивают нашу способность изучать проблемы восприятия AR, связанные с использованием HUD на открытом воздухе. Такие исследования необходимо проводить во время движения по испытательной трассе или фиксировать в помещении с видом на улицу.
Мы можем легко представить себе ближайшую будущую работу, которая исследует роль AR HUD в автономном и полуавтономном вождении. Наша интеграция игрового контроллера в качестве второстепенного средства для того, чтобы правильно расположить нас, чтобы начать эту работу.Стенд также хорошо подходит для интеграции трехмерного пространственного звука в дополнение к визуальным интерфейсам HUD. Наконец, мы начали интегрировать технологию распознавания жестов и голоса, чтобы мы могли изучить возможности взаимодействия с AR HUD. Такие возможности позволят нам расширить наше понимание отвлечения внимания водителя за пределы визуального внимания.
Заявление о доступности данных
Наборы данных, созданные для этого исследования, доступны по запросу соответствующему автору.
Заявление об этике
Исследования с участием людей были рассмотрены и одобрены Программой защиты человеческих исследований Технологического института штата Вирджиния. Пациенты / участники предоставили письменное информированное согласие на участие в этом исследовании.
Пациенты / участники предоставили письменное информированное согласие на участие в этом исследовании.
Взносы авторов
JG руководил созданием и интеграцией всех компонентов AR DriveSim, разработал пользовательское исследование и руководил созданием рукописи. MS провела пользовательское исследование, провела анализ данных для пользовательского исследования, подготовила обсуждение, связанное с пользовательским исследованием, и отредактировала рукопись. KT разработала все программное обеспечение, необходимое для AR DriveSim, протестировала и написала технический контент, связанный с компонентами программного обеспечения.HK выполнил обзор литературы, помог с логистикой установки AR DriveSim и отредактировал рукопись. BJ разработал все компоненты аппаратного обеспечения / микроконтроллера, необходимые для тестирования AR DriveSim, а также написал техническое содержание, относящееся к программным компонентам.
Финансирование
Этот материал основан на работе, поддержанной Национальным научным фондом в рамках гранта № 1816721.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Мы особенно благодарим Рэнди Уолдона и Уилла Веста за их бесконечную помощь и творческий подход к механике, конструкции и электричеству. Мы благодарим Ли Лайла за помощь в разборке и повторной сборке Mini Cooper, а также Мэтта Парадизо и Гаррета Стэра за расшифровку шины CAN и начальное программирование микроконтроллера. Винсент Хоросевски, Эндрю Фейт и Джозеф Мейдлингер из National Advanced Driving Simulator также сыграли важную роль в поддержке нашей работы.Наконец, мы благодарим компанию Progressive Insurance за пожертвование Mini Cooper в поддержку исследований в области вождения.
Список литературы
Администрация NHTS (2013). Visual-Manual Руководство NHTSA по отвлечению внимания водителя для бортовых электронных устройств (№ NHTSA-2010-0053) . Вашингтон, округ Колумбия: Национальное управление безопасности дорожного движения.
Вашингтон, округ Колумбия: Национальное управление безопасности дорожного движения.
Болтон, А., Бернетт, Г., Лардж, Д. Р. (2015). «Исследование представлений навигации на основе ориентиров в дополненной реальности с использованием проекционного дисплея», Труды 7-й Международной конференции по автомобильным пользовательским интерфейсам и интерактивным автомобильным приложениям (Ноттингем: ACM), 56–63.
Google Scholar
Бауэр, М., Хау, К., Маккреди, Н., Робинсон, А., и Гровер, Д. (2014). Дополненная реальность в образовании — кейсы, места и возможности. Educ. Media Int. 51, 1–15. DOI: 10.1080 / 09523987.2014.889400
CrossRef Полный текст | Google Scholar
Кэрд, Дж. К., Чисхолм, С. Л., и Локхарт, Дж. (2008). Улучшают ли автомобильные знаки улучшенные характеристики перекрестков пожилых и молодых водителей? Результаты моделирования вождения и движения глаз. Внутр. J. Hum. Комп. Stud. 66, 132–144. DOI: 10.1016 / j.ijhcs.2006.07.006
CrossRef Полный текст
Charissis, V., и Papanastasiou, S. (2010). Взаимодействие человека и машины через интерфейс проекционного дисплея транспортного средства. Cogn. Technol. Работа 12, 41–50. DOI: 10.1007 / s10111-008-0117-0
CrossRef Полный текст | Google Scholar
Charissis, V., Papanastasiou, S., Chan, W., and Peytchev, E. (2013). «Эволюция HUD с полным лобовым стеклом, разработанная для текущих стандартов связи VANET», в 16-я Международная конференция IEEE по интеллектуальным транспортным системам (Гаага: ITSC), 1637–1643.DOI: 10.1109 / ITSC.2013.6728464
CrossRef Полный текст | Google Scholar
де Брюэн, А. Б., Смитс, Н., Райкерс, Р. М., и Шмидт, Х. Г. (2008). Осознанная практика позволяет прогнозировать результаты со временем у шахматистов-подростков и выбывших из игры: линейный анализ смешанных моделей. руб. J. Psychol. 99, 473–497. DOI: 10.1348 / 000712608X295631
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Dijksterhuis, C. , Stuiver, A., Mulder, B., Brookhuis, K.А., и де Ваард, Д. (2012). Адаптивная система поддержки водителя: пользовательский опыт и ходовые качества в симуляторе. Hum. Факторы 54, 772–785. DOI: 10.1177 / 0018720811430502
, Stuiver, A., Mulder, B., Brookhuis, K.А., и де Ваард, Д. (2012). Адаптивная система поддержки водителя: пользовательский опыт и ходовые качества в симуляторе. Hum. Факторы 54, 772–785. DOI: 10.1177 / 0018720811430502
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дюнсер А., Биллингхерст М., Вен Дж., Лехтинен В. и Нурминен А. (2012). Изучение использования портативного устройства дополненной реальности для навигации на открытом воздухе. Comput. График. 36, 1084–1095. DOI: 10.1016 / j.cag.2012.10.001
CrossRef Полный текст | Google Scholar
Фишер, Д.Л., Риццо, М., Кейрд, Дж., И Ли, Дж. Д. (2011). Справочник по моделированию вождения для инженерии, медицины и психологии . CRC Press.
Google Scholar
Габбард Дж., Мехра Д. Г. и Свон Дж. Э. (2019). Влияние переключения контекста дисплея AR и переключения фокусного расстояния на работоспособность человека. IEEE Trans. Vis. Comput. График. 25, 2228–2241. DOI: 10.1109 / TVCG.2018.2832633
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ганс, Э., Робертс, Д., Беннет, М., Тоулз, Х., Меноцци, А., Кук, Дж. И др. (2015). «Технология дополненной реальности для дневной / ночной ситуационной осведомленности для спешенного солдата», в SPIE Defense + Security (Балтимор, Мэриленд: Международное общество оптики и фотоники), 947004.
Google Scholar
Харт, С. Г., и Ставленд, Л. Е. (1988). Разработка NASA-TLX (Task Load Index): результаты эмпирических и теоретических исследований. Adv. Psychol. 52, 139–183.DOI: 10.1016 / S0166-4115 (08) 62386-9
CrossRef Полный текст | Google Scholar
Ким, Х., Ислейб, Дж. Д., и Габбард, Дж. Л. (2016). «Виртуальная тень: отображение динамики перекрестного трафика на головном дисплее с дополненной реальностью», Протокол Ежегодного собрания Общества по человеческому фактору и эргономике (Лос-Анджелес, Калифорния: SAGE Publications), 2093–2097.
Google Scholar
Ким, Х., Ву, X., Габбард, Дж. Л., и Полис, Н. Ф. (2013). «Изучение головных интерфейсов дополненной реальности для систем предупреждения о столкновениях», Труды 5-й Международной конференции по автомобильным пользовательским интерфейсам и интерактивным автомобильным приложениям (Эйндховен: ACM), 224–227.DOI: 10.1145 / 2516540.2516566
CrossRef Полный текст | Google Scholar
Ким С., Дей А. К. (2009). «Смоделированный дисплей с дополненной реальностью на лобовом стекле в качестве вспомогательного средства когнитивного картирования для навигации пожилого водителя», в материалах Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (Boston, MA: ACM), 133–142.
Google Scholar
Ланглуа, С. (2013). «ADAS HMI с использованием периферийного зрения», в Труды 5-й Международной конференции по автомобильным пользовательским интерфейсам и интерактивным автомобильным приложениям (Эйндховен: ACM), 74–81.
Google Scholar
Лаубер Ф. и Бутц А. (2013). «Разве hmds лучше huds?» в , 2013 Международный симпозиум IEEE по смешанной и дополненной реальности (ISMAR) (Аделаида, SA: IEEE), 267–268.
Google Scholar
Лоренц, Л., Кершбаум, П., и Шуман, Дж. (2014). Разработка сценариев перехода на автоматическое вождение: как дополненная реальность помогает водителю вернуться в цикл? Proc. Гул. Факторы Эргона. Soc. Анну. Встретиться. 58, 1681–1685. DOI: 10.1177 / 1541931214581351
CrossRef Полный текст | Google Scholar
Меденица, З., Кун, А. Л., Пэк, Т., и Палинко, О. (2011). «Дополненная реальность и виды улиц: исследование на симуляторе вождения, сравнивающее два появляющихся навигационных средства», в материалах Труды 13-й Международной конференции по взаимодействию человека и компьютера с мобильными устройствами и службами (Стокгольм: ACM), 265–274. DOI: 10.1145 / 2037373.2037414
CrossRef Полный текст | Google Scholar
Мешкати, Н. (1988). Оценка вариабельности сердечного ритма и умственной нагрузки. Adv. Psychol. 52, 101–115. DOI: 10.1016 / S0166-4115 (08) 62384-5
(1988). Оценка вариабельности сердечного ритма и умственной нагрузки. Adv. Psychol. 52, 101–115. DOI: 10.1016 / S0166-4115 (08) 62384-5
CrossRef Полный текст | Google Scholar
Neurauter, M. L. (2005). Мультимодальные предупреждения: дизайн предупреждения о повороте. Proc. Гул. Факторы Эргона. Soc. Аня. Встретиться. 49, 1945–1949. DOI: 10.1177 / 1541931205043
CrossRef Полный текст | Google Scholar
Олаверри-Монреаль, К., Гомеш, П., Сильверия, М. К., и Феррейра, М.(2012). «Виртуальные светофоры в автомобиле: графический пользовательский интерфейс», Информационные системы и технологии [-108 мм], 14 квартал (CISTI), 7-я Иберийская конференция, 2012 г., (Мадрид), 1–6.
Google Scholar
Пфаннмюллер, Л., Крамер, М., Сеннер, Б., и Бенглер, К. (2015). Сравнение концепций отображения для навигационной системы в автомобильном контактном аналоговом проекционном дисплее. Proc. Manuf. 3, 2722–2729. DOI: 10.1016 / j.promfg.2015.07.678
CrossRef Полный текст | Google Scholar
Пиментель, Дж.Р. и Фонсека Дж. А. (2004). FlexCAN: гибкая архитектура для высоконадежных встраиваемых приложений. РТН 2004: 11.
Google Scholar
Плавшич, М., Душл, М., Тённис, М., Бабб, Х. и Клинкер, Г. (2009). «Эргономичный дизайн и оценка предупреждающих предупреждений на основе дополненной реальности для помощи водителю в городских условиях», в материалах Международной эргономической ассоциации (Пекин).
Google Scholar
Политис, И., Брюстер, С.А., и Поллик, Ф. (2014). «Оценка дисплеев мультимодальных драйверов в условиях различной ситуационной срочности», в материалах Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (ACM), 4067–4076.
Google Scholar
Ран, Л., Цзюньфэн, В., Хайин, В., и Гечен, Л. (2010). «Метод проектирования сетевой коммуникационной структуры CAN-шины для электромобиля», в Strategic Technology (IFOST), Международный форум 2010 по (IEEE), 326–329.
Google Scholar
Саффариан М., де Винтер, Дж. К. Ф., Хаппе Р. (2013). Повышение эффективности следования за автомобилем за счет отображения расстояния и ускорения. Hum. Мах. Syst. IEEE Trans. 43, 8–16. DOI: 10.1109 / TSMCA.2012.2207105
CrossRef Полный текст | Google Scholar
Сала, С. Д., Баддели, А., Папаньо, К., и Спиннлер, Х. (1995). Парадигма двойной задачи: средство изучения центральной исполнительной власти. Ann. N.Y. Acad. Sci. 769, 161–172.DOI: 10.1111 / j.1749-6632.1995.tb38137.x
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Сойер, Б. Д., Финомор, В. С., Кальво, А. А., и Хэнкок, П. А. (2014). Стекло Google: причина отвлечения внимания водителя или лекарство? Hum. Факторы 56, 1307–1321. DOI: 10.1177 / 0018720814555723
CrossRef Полный текст | Google Scholar
Шалл, М.С., Руш, М.Л., Ли, Дж. Д., Доусон, Дж. Д., Томас, Г., Аксан, Н. и др. (2013). Сигналы дополненной реальности и восприятие опасности для пожилых водителей. Hum. Факторы 55, 643–658. DOI: 10.1177 / 0018720812462029
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Сеппельт, Б. Д., Симан, С., Ли, Дж., Энджелл, Л. С., Мехлер, Б., и Реймер, Б. (2017). Стекло наполовину заполнено: показатели взгляда на дороге позволяют дифференцировать аварии от почти аварийных в данных о 100 автомобилях. Accid. Анальный. Ранее . 107, 48–62. DOI: 10.1016 / j.aap.2017.07.021
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ши, Р., Fu, D., Sun, A., Cai, C., Ma, X., Fan, X., et al. (2017). Дополненная реальность на основе местоположения с повсеместными датчиками смартфонов: внутри и за пределами Pokemon Go ! Доступ IEEE.
Google Scholar
Шен, Ф., Чен, Б., Го, К., Ци, Ю., и Шен, Ю. (2013). Реконструкция пластинки с дополненной реальностью для конкретного пациента для хирургии перелома вертлужной впадины и таза. Внутр. J. Comp. Ассистент. Радиол. Surg. 8, 169–179. DOI: 10.1007 / s11548-012-0775-5
Внутр. J. Comp. Ассистент. Радиол. Surg. 8, 169–179. DOI: 10.1007 / s11548-012-0775-5
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Скарбез, Р., Брукс, Ф. П., и Уиттон, М. С. (2017). Обзор присутствия и связанных понятий. ACM Comput. Surv. 50, 1–39. DOI: 10.1145 / 3134301
CrossRef Полный текст | Google Scholar
Смит, М., Габбард, Дж. Л., Бернетт, Г., и Дачева, Н. (2017). Влияние лобовых дисплеев с дополненной реальностью на шаблоны сканирования глаз, производительность и восприятие водителей. Внутр. J. Mob. Гул. Комп. Взаимодействовать. 9, 1–17. DOI: 10.4018 / IJMHCI.2017040101
CrossRef Полный текст | Google Scholar
Смит, М., Габбард, Дж. Л., и Конли, К. (2016). «Головные дисплеи по сравнению с дисплеями, направленными вниз: изучение традиционных методов оценки изображения во время вождения», в материалах Труды 8-й Международной конференции по автомобильным пользовательским интерфейсам и интерактивным автомобильным приложениям (ACM), 185–192. DOI: 10.1145 / 3003715.3005419
CrossRef Полный текст | Google Scholar
Типпи, К. Г., Сиварадж, Э., Ардуан, В.-Дж., Роуди, Т., и Феррис, Т. К. (2014). Отправка текстовых сообщений во время вождения с использованием стекла Google: исследование комбинированного влияния отображения на лобовое стекло и ввода без помощи рук на безопасность и производительность вождения. Proc. Гул. Факторы Эргона. Soc. Аня. Встретиться. 58, 2023–2027. DOI: 10.1177 / 1541931214581422
CrossRef Полный текст | Google Scholar
Типпи, К. Г., Сиварадж, Э., и Феррис, Т. К. (2017). Вождение при взаимодействии со стеклом Google: исследование комбинированного влияния проекционного дисплея и ввода без помощи рук на безопасность вождения и производительность в многозадачном режиме. Hum. Факторы 59, 671–688. DOI: 10.1177 / 00187208176
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Тонн, C. , Петцольд, Ф., Бимбер, О., Грундхёфер, А., и Донат, Д. (2008). Пространственная дополненная реальность для архитектуры — проектирование и планирование с существующими зданиями и внутри них. Внутр. J. Architect. Комп. 6, 41–58. DOI: 10.1260 / 147807708784640126
, Петцольд, Ф., Бимбер, О., Грундхёфер, А., и Донат, Д. (2008). Пространственная дополненная реальность для архитектуры — проектирование и планирование с существующими зданиями и внутри них. Внутр. J. Architect. Комп. 6, 41–58. DOI: 10.1260 / 147807708784640126
CrossRef Полный текст | Google Scholar
Тоннис М. и Клинкер Г. (2006). «Эффективный контроль внимания водителя автомобиля для визуального и звукового наведения на направление неминуемой опасности», в Mixed and Augmented Reality, 2006.ISMAR 2006. Международный симпозиум IEEE / ACM по (Вашингтон, округ Колумбия: IEEE), 13–22.
Google Scholar
Тран, К., Барк, К., и Нг-Тоу-Хинг, В. (2013). «Устройство помощи при левом повороте, использующее проектируемые встречные пути транспортных средств с дополненной реальностью», в материалах Труды 5-й Международной конференции по автомобильным пользовательским интерфейсам и интерактивным автомобильным приложениям (ACM), 300–307.
Google Scholar
Вай-Тат, Ф., Гаспер, Дж., И Сон-Ван, К.(2013). «Влияние автомобильной системы дополненной реальности на повышение безопасности молодых и пожилых водителей», на Международном симпозиуме IEEE по смешанной и дополненной реальности (ISMAR) , 59–66. DOI: 10.1109 / ISMAR.2013.6671764
CrossRef Полный текст | Google Scholar
Вайнберг, Г., Харшам, Б., и Меденица, З. (2011). «Оценка удобства использования проекционного дисплея для выбора из списков выбора в автомобилях», Труды 3-й Международной конференции по автомобильным пользовательским интерфейсам и интерактивным автомобильным приложениям (ACM), 39–46.
Google Scholar
Wierwille, W. W., and Eggemeier, F. T. (1993). Рекомендации по измерению умственной нагрузки в тестовой и оценочной среде. Hum. Факторы 35, 263–281. DOI: 10.1177 / 001872089303500205
CrossRef Полный текст | Google Scholar
Визнер, К. А., Клинкер, Г. (2017). «Преодоление неточностей местоположения в навигации в дополненной реальности», Международная конференция по дополненной реальности, виртуальной реальности и компьютерной графике (Ugento: Springer), 377–388.