
Импульсное управление исполнительным двигателем постоянного тока (Лекция 20)
§ 2.3. Импульсное управление исполнительным двигателем постоянного тока
В связи с развитием полупроводниковой техники все шире применяется импульсное управление исполнительным двигателем. Суть его заключается в том, что частоту вращения двигателя регулируют не величиной постоянно подводимого напряжения, а длительностью питания двигателя номинальным напряжением. Одна из возможных схем импульсного управления приведена на рис. 2.7,а. Там же (рис. 2.7,б) показаны графики скорости при различных t.
В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель,
ток якоря увеличивается, двигатель развивает положительный момент и частота
вращения возрастает; когда электронный ключ закрыт, ток под действием
запаса электромагнитной энергии продолжает протекать в том же направлении но
через обратный диод. При этом он уменьшается, момент двигателя уменьшается,
угловая скорость вращения падает.
Рис. 2.7. Схема импульсного управления (а), графики скорости вращения (б) при разных τ. (τ2 > τ1)
Работа двигателя состоит из чередующихся периодов разгона и торможения. И, если эти периоды малы по сравнению с электромагнитной постоянной времени якорной цепи Тэм.а, устанавливается некая средняя скорость, однозначно определяемая относительной продолжительностью включения (скважностью) t = tи/T, где tи — длительность импульса напряжения; T — период.
Частота управляющих импульсов составляет 200-400 Гц, в результате период управления Т оказывается на 2 порядка меньше электромагнитной постоянной времени обмотки якоря
Управление, при котором изменяется соотношение длительности импульса tи и паузы tп при постоянном периоде Т, называется широтно-импульсным.
Если параметры схемы
подобраны так, что колебания тока, момента и угловой скорости вращения
небольшие, работа двигателя практически не отличается от работы при постоянном
напряжении, за которое можно принять среднее напряжение за период управления Т:
U ср = Uномtи/T = tUном.
Оперируя средними значениями, получим уравнение, аналогичное (2.4), поскольку в данном случае мы имеем якорное управление
На рис. 2.8,а показаны графики тока сети (Ic) и тока якоря (Ia) при относительно больших нагрузках. При малых нагрузках ток двигателя становится небольшим и появляются периоды, когда при закрытом электронном ключе ток якоря уменьшается до нуля. Говорят, наступил режим прерывистых токов (рис.2.8,б). Механические характеристики приобретают перелом и становятся похожими на характеристики двигателя при регулировании реостатом в цепи якоря. В общем случае они имеют вид, представленный на рис. 2.9. Зона, соответствующая прерывистым токам, ограничена пунктирной линией. Критическая относительная частота вращения, при которой наступает перелом, равна
где: b=T/Tэм ; T =tи + tп ; Tэм = Lа/Rа.
Рис. 2.8. Графики тока сети Ic и тока якоря Ia при больших нагрузках (а) и тока якоря при малых нагрузках (б)
Основное преимущество импульсного управления заключается в уменьшении средней потребляемой мощности за счет уменьшения среднего тока.
§ 2.4. Динамические характеристики исполнительных двигателей постоянного тока
Механические характеристики исполнительных двигателей постоянного тока линейные, поэтому для них выражение электромеханической постоянной времени будет иметь известный вид (1.11).
При якорном управлении характеристики параллельные, т.е. пусковой момент и угловая скорость холостого хода изменяются пропорционально коэффициенту сигнала: М п = aМб, w0 = awб. В этом случае постоянная времени, а следовательно и быстродействие, не зависят от коэффициента сигнала.
При полюсном управлении пусковой момент прямо- а угловая частота вращения холостого хода обратно пропорциональны
коэффициенту сигнала: Мп = aМб,
w0= wб/a. Постоянная времени будет Тм
= Jwб/Мбa2. Видно, что при
полюсном управлении быстродействие в сильной степени зависит от коэффициента
сигнала, ухудшаясь с его уменьшением.
Постоянная времени будет Тм
= Jwб/Мбa2. Видно, что при
полюсном управлении быстродействие в сильной степени зависит от коэффициента
сигнала, ухудшаясь с его уменьшением.
§ 2.5. Конструкции исполнительных двигателей постоянного тока
По конструкции исполнительные двигатели можно разделить на двигатели с ферромагнитным якорем и малоинерционные, не имеющие ферромагнитного сердечника якоря.
Двигатели с ферромагнитным якорем и обмоткой возбуждения отличаются от обычных машин лишь тем, что имеют полностью шихтованную магнитную систему (якорь, полюса, станину), что продиктовано стремлением уменьшить потери в стали и увеличить быстродействие в переходных режимах. Это двигатели серий СЛ, МИ, ПБС и др. Есть двигатели (серии ДП и ДПМ), в которых роль обмотки возбуждения выполняют постоянные магниты. В остальном они ничем не отличаются от названных выше.
Существуют двигатели,
например серии МИГ, в которых обмотка якоря располагается не в пазах (их
нет), а непосредственно на поверхности якоря, закрепляясь на ней с помощью
специального клея и бандажей. «Беспазовое» исполнение обмотки
значительно уменьшает ее индуктивность, улучшает коммутацию и увеличивает
быстродействие. Недостатком гладкого якоря является большой немагнитный
промежуток между ним и полюсом, что увеличивает размеры обмотки возбуждения.
«Беспазовое» исполнение обмотки
значительно уменьшает ее индуктивность, улучшает коммутацию и увеличивает
быстродействие. Недостатком гладкого якоря является большой немагнитный
промежуток между ним и полюсом, что увеличивает размеры обмотки возбуждения.
Малоинерционные двигатели выпускаются двух типов: 1) с дисковым якорем и печатной обмоткой; 2) с полым немагнитным якорем и обычной обмоткой. Один из вариантов двигателя первого типа показан на рис. 2.14. В его состав входят: дисковый якорь 1, выполненный из тонкого изоляционного материала, на обеих сторонах которого фотохимическим методом нанесена обмотка якоря; кольца 2 и 3 из магнитомягкой стали, по которым замыкается магнитный поток, созданный постоянными магнитами 4, и щетки 5, непосредственно касающиеся оголенных проводников якоря. Как видно, здесь отсутствует отдельный коллектор.
Двигатель второго типа показан на рис. 2.15.
Якорь малоинерционных двигателей примерно в 8 раз легче, а момент инерции в 5¸10 раз меньше, чем у
обычного двигателя.
Далее…
Управление двигателем постоянного тока — схема и важные нюансы
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.
Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.
Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику.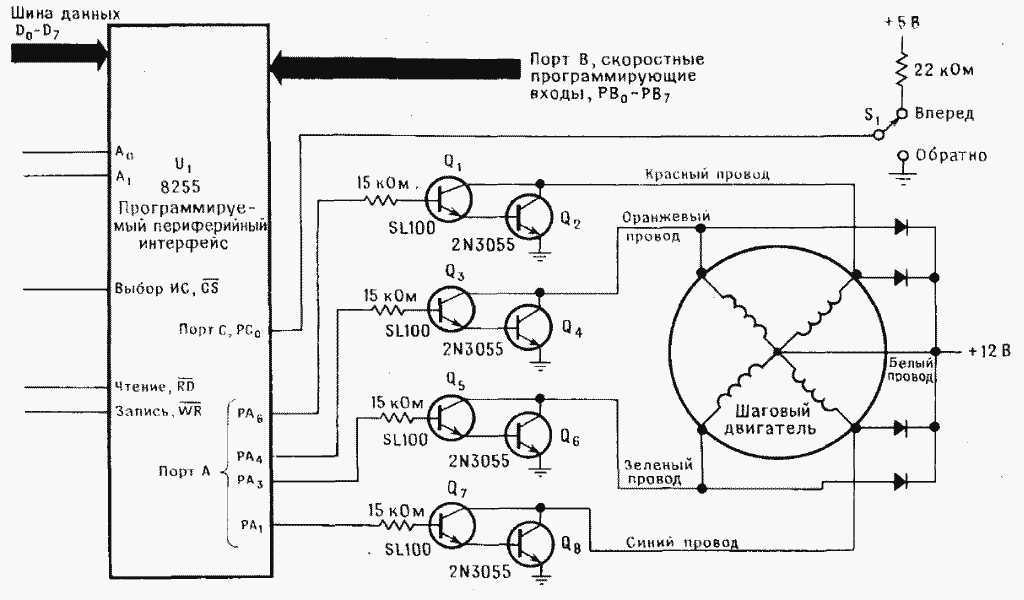 Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.
Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ).![]() «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
«Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.
Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.
Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.
Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Автоматическое управление двигателем
Автоматическое управление двигателями переменного тока в насосных станциях осуществляется электрической аппаратурой высокого и низкого напряжения, вручную и автоматически. При ручном управлении дежурный персонал может производить включение и отключение двигателей непосредственно у места их установки или дистанционно — со щита управления, находящегося в том же здании или расположенного на небольшом расстоянии от объекта управления.
При автоматическом управлении вмешательство дежурного персонала не требуется, так как импульсы на включение и отключение двигателей подают специальные реле, реагирующие на изменение тех или иных технологических параметров (давление, расход, уровень и пр.).
Осуществление дистанционного и автоматического управления двигателями возможно лишь при использовании релейно-контакторной аппаратуры, какая приходит в действие от импульсов малой мощности и обеспечивает высокую надежность работы. Электрические аппараты, входящие в состав электрических схем контакторного управления, выполняют различные функции.
Электрические аппараты, входящие в состав электрических схем контакторного управления, выполняют различные функции.
Одни из них подают командный импульс другим элементам схемы для изменения режима электрического привода и сигнализации: аппараты управления (кнопки, универсальные переключатели и т. п.), аппараты, контролирующие электрические и технологические параметры (реле напряжения тока, реле уровня, давления и др.), аппараты, контролирующие положение механизмов (путевые и конечные выключатели) и пр.
Другие аппараты воспринимают командный импульс и осуществляют переключения в главных или силовых цепях двигателей. Основными из них являются: контакторы, автоматы, масляные выключатели и др. Кроме них в электрические схемы включаются защитные аппараты, отключающие электрические цепи и двигатели при электрических и гидромеханических повреждениях—реле, а также контрольно-измерительные и сигнальные приборы.
Большая часть аппаратуры, применяемой в схемах контакторного управления двигателями, монтируется на станциях управления (магнитные станции), которые по своему конструктивному исполнению делятся на панели управления и блоки управления.
Аппараты ручного управления, приборы измерения и сигнализации, в зависимости от способа управления могут устанавливаться у места установки двигателя или монтироваться на щитах управления в насосных станциях и в диспетчерских пунктах.
Аппараты, контролирующие технологические параметры и положение механизмов, устанавливаются в соответствующих устройствах (резервуары, трубопроводы, насосы, задвижки и пр.) в различных местах и на различном расстоянии от места управления.
Все указанные элементы независимо от места установки связываются одной общей схемой, которая составляется в соответствии с технологическим заданием и должна обеспечить определенную последовательность выполнения операций рабочим механизмом, а также необходимые блокировки.
Блокировками называются механические и электрические связи, исключающие опасный режим, возможный по различным причинам (повреждения в схеме, неправильные действия обслуживающего персонала) и электрические связи, разрешающие работу электрического привода только в случае соблюдения определенных условий, например, при определенном деленном положении другого механизма, при работе электрического привода другого механизма и т. п.
п.
Схемы контакторного управления двигателями составляются по определенным правилам, главные из которых следующие: Цепи главного тока или силовые цепи отделяются от цепей управления и вычерчиваются жирными линиями, а вспомогательные — тонкими линиями.
Отдельные элементы одного и того же аппарата для удобства чтения изображаются не сосредоточенно в одном месте схемы, а в различных участках ее, причем элементы одного и того же аппарата имеют одни и те же буквенные обозначения. Буквенные обозначения аппаратуры содержат одну или несколько букв, из которых первая может соответствовать наименованию аппарата, а вторая — ее назначению.
Например, КЛ — контактор линейный, КУ — контактор ускорения и т. д. Если в схеме имеется несколько аппаратов, выполняющих одинаковые функции, каждому из них дается порядковый номер, например 1КУ—первый контактор ускорения, 2КУ— второй контактор ускорения и т. д. При выверчивании схем пользуются условными обозначениями, установленными ГОСТ 7624-55.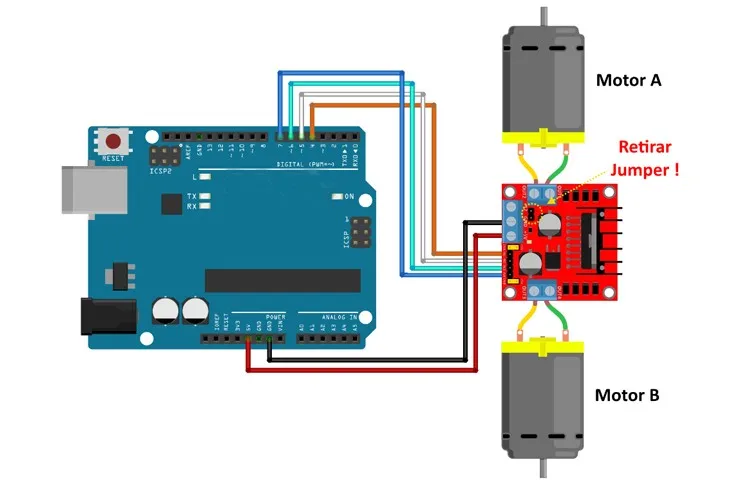 Главные из них приведены в таблице 33.
Главные из них приведены в таблице 33.
Схемы управления асинхронными двигателями. Наибольшее распространение в электрическом приводе центробежных насосов получили асинхронные двигатели с короткозамкнутым ротором. Для управления асинхронным двигателем с короткозамкнутым ротором небольшой мощности часто применяется магнитный пускатель. Он представляет собой контактор с двумя тепловыми реле, укрепленными на изоляционной плите в общем металлическом кожухе (рис. 299).
Схема магнитного пускателя (рис. 300) предусматривает следующую последовательность действия. При нажатии кнопки «пуск» возбуждается катушка линейного контактора JI, которая замыкает главными контактами силовую цепь двигателя, а блокконтактами шунтирует кнопку «пуск», что позволяет при возвращении кнопки в нормально открытое положение держать цепь катушки линейного контактора под напряжением.
Для остановки двигателя нажимают на кнопку «стоп» — катушка контактора, потеряв возбуждение, отпускает главные контакты в силовой цепи двигателя и блокировочные во вспомогательной цепи- Для повторного включения необходимо нажать вновь кнопку «пуск». Таким образом, схема позволяет произвести только пуск и отключение двигателя и предусматривает следующую защиту двигателя: а) от перегрузки — тепловыми реле РТ, б) от произвольного самозапуска— нормально открытыми контактами «пуск».
Таким образом, схема позволяет произвести только пуск и отключение двигателя и предусматривает следующую защиту двигателя: а) от перегрузки — тепловыми реле РТ, б) от произвольного самозапуска— нормально открытыми контактами «пуск».
Нагревательные элементы теплового реле РТ включены в силовую цепь двигателя, а нормально закрытый контакт — в цепь катушки линейного контактора. В случае перегрузки двигателя биметаллический элемент реле нагревается, своими контактами размыкает цепь питания катушки Л и тем самым силовую цепь двигателя. Так как цепь управления магнитного пускателя питается от силовой цепи двигателя, в случае внезапного исчезновения напряжения контактор отключает двигатель от сети.
Повторное включение двигателя после перерыва в подаче энергии возможно только после нажатия кнопки «пуск», т. е. самозапуск двигателя невозможен. Описанный порядок работы схемы предполагает полуавтоматическое управление, при котором импульсы на включение и отключение двигателя подаются от руки с помощью кнопок «пуск» и «стоп».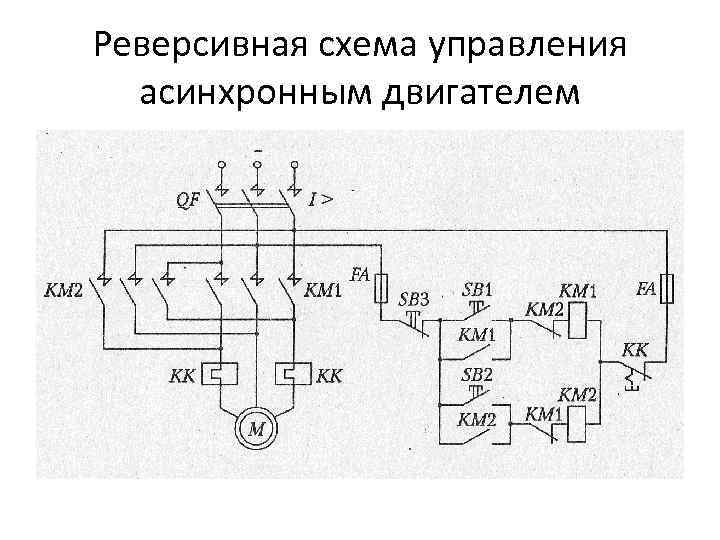 В случае автоматического управления импульсы на включение и отключение двигателя посылаются реле технологического контроля РТК, какими могут быть: реле уровня, реле давления и др.
В случае автоматического управления импульсы на включение и отключение двигателя посылаются реле технологического контроля РТК, какими могут быть: реле уровня, реле давления и др.
Контакты этих реле присоединяются параллельно кнопке «пуск» и последовательно кнопке «стоп» и действуют автоматически с изменением регулирующего параметра (на схеме пускателя обозначены пунктиром). Для управления электродвигателями задвижек используются реверсивные магнитные пускатели, снабженные двумя контакторами, позволяющими не только включать и выключать двигатели, но и изменять направление их вращения.
На рис. 301 показана схема управления короткозамкнутым двигателем с помощью реверсивного магнитного пускателя. При нажатии кнопки «вперед» включается контактор В, при нажатии кнопки «назад» — контактор Н. При этом меняется порядок чередования фаз, изменяется направление вращения магнитного потока и ротора двигателя. Одновременное включение контакторов В и Н недопустимо, так как при этом происходит короткое замыкание силовой цепи двигателя.
Поэтому в схеме пускателя предусматривается электрическая блокировка, не допускающая одновременного включения реверсивных контакторов. Она производится при помощи нормально закрытых блок-контактов H— в цепи катушки В и блок-контактов В — в цепи катушки Н. Кроме электрической, обычно предусматривается еще и механическая блокировка контакторов.
Применение магнитных пускателей для управления и защиты асинхронных двигателей с короткозамкнутым ротором желательно во всех случаях, когда это допустимо по мощности двигателя (при напряжении 380 в около 55 квт), исключая установки, где требуется самозапуск двигателя, а также действие защиты на сигнал, а не на отключение (пожарные насосы).
Для привода вакуум-насосов и дренажных насосов магнитные пускатели могут быть установлены и без тепловой защиты, так как работа их непродолжительна, а перегрузка по технологическому режиму исключена.
Магнитные станции управления. Для пуска двигателей малой и средней мощности в настоящее время широко используются магнитные станции нормализованных серий (блоки управления, панели управления), на которых монтируются автоматы, контакторы, максимальные реле или предохранители, иногда тепловые реле и предохранители.
Блоки управления имеют схему управления, подобную схеме магнитного пускателя, и отличаются от последней только деталями. Аппаратура блока монтируется на одной изоляционной плите, которая может быть установлена индивидуально или по несколько штук на одной общей раме. В отличие от блоков панели управления имеют более сложную схему управления, большее количество аппаратов и монтируются на нескольких изоляционных плитах, укрепленных на общей раме из угловой стали.
На рис. 302 показана схема управления станции управления серии БН нулевой, 1 и 2-й величин, а на рис. 303—общий вид станции. Предельный ток в длительном режиме этих станций составляет соответственно 15, 40 и 75а. Максимально-мгновенная защита в трех фазах главной цепи и тепловая в трех фазах, действующая при перегрузке либо при двухфазной работе двигателя, осуществляется воздушным автоматом А, установленным совместно с контактором Л на общей изоляционной плите.
Для подготовки схемы к действию необходимо перед пуском включить автомат от руки. Дистанционное или автоматическое управление производится импульсами, подаваемыми от установленных вне станций командоаппаратов (кнопок, универсальных переключателей с самовозвратом в нулевое положение или реле, воспринимающих изменения тех или иных технологических параметров).
Дистанционное или автоматическое управление производится импульсами, подаваемыми от установленных вне станций командоаппаратов (кнопок, универсальных переключателей с самовозвратом в нулевое положение или реле, воспринимающих изменения тех или иных технологических параметров).
У станций серии БН 3-й величины максимальная защита осуществляется с помощью плавких предохранителей, тепловая защита — тепловыми реле. У станций 4-й и 5-й величины максимально мгновенная защита осуществляется максимальными реле, а тепловая — тепловыми реле РТ, включенными через трансформаторы тока.
Элементная схема и общий вид станции серии БН 4-й и 5-й величины показаны на рис. 304 и 305. В зависимости от величины установленного контактора (КТЗЗА, КТ34А или КТ35А) предельный ток в длительном режиме станции 3, 4 и 5-й величины составляет 150, 300 и 600а. Станции серии БН рассчитаны на прямой пуск двигателя от полного напряжения сети. Однако пусковые тока отдельных асинхронных двигателей большой мощности при прямом пуске могут вызвать значительное снижение напряжения в сети и нарушить нормальную работу других приемников.
В таких случаях для уменьшения пусковых токов в цепь статора двигателя на период пусков включается активное сопротивление. На рис. 306 приведена схема пуска асинхронного двигателя с активным сопротивлением в цепи статора магнитной станции серии ПИ5320. При включении вспомогательной цепи рубильником 2Р возбуждается электромагнитное реле времени РУ. Так как катушка реле работает на постоянном токе, она подключена к цепи переменного тока через, купроксный выпрямитель ВК. Своими контактами реле РУ мгновенно замыкает цепь катушки контактора ускорения У, подготавливая цепь пуска двигателя, и размыкает цепь катушки линейного контактора Л.
При подаче импульса от руки кнопкой «пуск» или контактами реле технологического контроля возбуждается контактор У и своими глазными контактами подает пониженное, с помощью пускового сопротивления СП, напряжение в цепь статора двигателя, а блок-контактами подготавливает цепь катушки линейного контактора и размыкает цепь реле управления РУ.
Реле РУ с выдержкой времени, достаточной для разгона двигателя, размыкает цепь катушки контактора ускорения и замыкает цепь катушки линейного контактора, который подает полное напряжение на статор двигателя. Защита двигателя от перегрузки осуществляется тепловыми реле ITT и 2ТТ, подключенными к статору через трансформаторы тока, а от коротких замыканий — максимальными реле 1PM, 2РМ и ЗРМ. Общий вид магнитной станции серии ПН5320 приведен на рис. 307.
Защита двигателя от перегрузки осуществляется тепловыми реле ITT и 2ТТ, подключенными к статору через трансформаторы тока, а от коротких замыканий — максимальными реле 1PM, 2РМ и ЗРМ. Общий вид магнитной станции серии ПН5320 приведен на рис. 307.
Схемы управления синхронными двигателями. Отсутствие пускового момента у синхронного двигателя требует специальных устройств для разгона двигателя. Для этой цели на ротор укладывается короткозамкнутая пусковая обмотка, создающая момент, подобно асинхронному двигателю. При достижении ротором подсинхронной скорости в обмотку возбуждения подают постоянный ток, двигатель входит в синхронизм, развивая момент за счет взаимодействия магнитного поля статора и магнитного поля ротора, возбуждаемого постоянным током.
Процесс автоматизации пуска синхронного двигателя сводится главным образом к установлению определенной очередности в управлении цепями статора и ротора. Операции по управлению цепями статора синхронного двигателя аналогичны операциям при управлении асинхронного двигателя. Операции по управлению цепи ротора заключаются в том, чтобы на период пуска замкнуть обмотку возбуждения на разрядное сопротивление, а при подходе к синхронной скорости подать в нее полное возбуждение от источника постоянного тока.
Операции по управлению цепи ротора заключаются в том, чтобы на период пуска замкнуть обмотку возбуждения на разрядное сопротивление, а при подходе к синхронной скорости подать в нее полное возбуждение от источника постоянного тока.
Схема прямого пуска синхронного двигателя высокого напряжения в функции пускового тока двигателя показана на рис. 308. Статор двигателя присоединяется к сети масляным выключателем Л, а ротор с обмоткой возбуждения постоянно подключен к возбудителю В через разрядное сопротивление СГ. Токовое пусковое реле РПТ, дающее импульс на подачу полного возбуждения в ротор, питается от трансформатора тока, а реле форсировки возбуждения — от трансформатора напряжения, присоединенных к высоковольтной стороне двигателя.
При пуске двигателя реле РПТ возбуждается сразу при подаче напряжения на статор, замыкает свой н. о. контакт в цепи блокировочного реле 1РБ,.которое закрывает контакт в цепи 2РБ и открывает в цепи катушки контактора М. Пои подходе к синхронной скорости и уменьшении пускового тока реле РПТ размыкает цепь реле 1РБ, которое с выдержкой времени ~ 0,5 сек. замкнет контакты в цепи катушки контактора М; контактор М своими главными контактами зашунтирует разрядное сопротивление СГ и подаст полное возбуждение на ротор двигателя, а блок-контактом подготовит цепь отключающей катушки контактора.
замкнет контакты в цепи катушки контактора М; контактор М своими главными контактами зашунтирует разрядное сопротивление СГ и подаст полное возбуждение на ротор двигателя, а блок-контактом подготовит цепь отключающей катушки контактора.
Наличие отключающей катушки у контактора М объясняется тем, что контактор имеет защелку и его контакты удерживаются во включенном положении при обесточенной катушке. При отключении двигателя от сети блок-контакты масляного выключателя замыкают цепь питания отключающей катушки (катушка защелки), которая своими блок-контактами подключает параллельно основную катушку контактора и совместным тяговым усилием освобождает подвижную систему контактора.
Блокировочное реле 2РБ вводится в схему управления для защиты пусковой обмотки двигателя от затянувшегося асинхронного пуска, так как она не рассчитана на длительную работу. Выдержка времени этого реле устанавливается в 3 сек. Если по прошествии 3 сек. контактор М не включится и двигатель по какой-либо причине не войдет в синхронизм, реле 2РБ отключит контактор М и снимет тем самым возбуждение на роторе.
Реле форсировки возбуждения РФ срабатывает при уменьшении напряжения в сети ниже заданного предела, подает напряжение на втягивающую катушку контактора Ф, который своими блок-контактами шунтирует сопротивление в обмотке возбуждения возбудителя, чем обеспечивает повышение тока возбуждения ротора. Усиление тока возбуждения повышает момент двигателя и предотвращает выпадение его из синхронизма при колебаниях напряжения в сети.
Цепь управления двигателя питается постоянным током от возбудителя и защищается тепловыми реле автомата АВ. Защита цепи статора от перегрузки и коротких замыканий в схему станции не включается и осуществляется реле, установленными в распределительном устройстве высокого напряжения, с действием на отключение масляного выключателя JI.
Внешний вид магнитной станции показан на рис. 309. Для механизмов с легкими условиями пуска, к которым относятся и центробежные насосы, в настоящее время рекомендуется схема запуска синхронного двигателя с глухо присоединенным возбудителем В.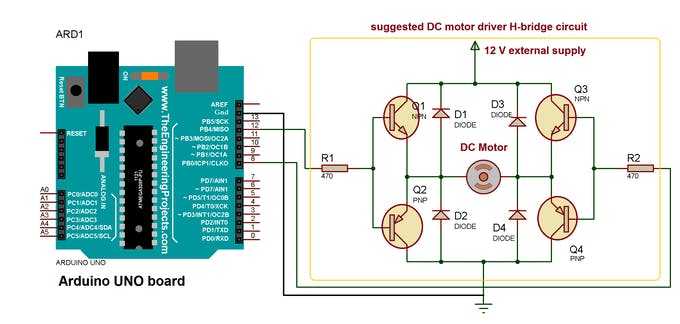 Реле пусковое токовое, разрядное сопротивление и контактор подачи возбуждения М — устраняются. Возбудитель разворачивается вместе с двигателем и при подходе к синхронной скорости обеспечивает полное напряжение возбуждения.
Реле пусковое токовое, разрядное сопротивление и контактор подачи возбуждения М — устраняются. Возбудитель разворачивается вместе с двигателем и при подходе к синхронной скорости обеспечивает полное напряжение возбуждения.
На рис. 310 показана схема станции типа БН7302 для управления высоковольтным синхронным двигателем с глухоприсоединенным возбудителем. Статор подключается на полное напряжение сети масляным выключателем Л и разгоняется как асинхронный. Так как в процессе разгона напряжение возбудителя растет, при подходе к синхронной скорости, обеспечивается полный ток в обмотке возбуждения ротора и двигатель нормально входит в синхронизм, развивая соответствующий момент.
Схема позволяет форсировку возбуждения двигателя контактором Ф, цепь которого замыкается реле РФ, подключенным вместе с включающей катушкой масляного выключателя JI к трансформатору напряжения. Добавочное сопротивление СД в цепи контактора Ф уменьшает величину тока в катушке, когда контактор сработает, так как для удержания его во включенном положении требуется меньшее усилие, чем при включении. Общий вид магнитной станции типа БН7302 показан на рис. 311.
Общий вид магнитной станции типа БН7302 показан на рис. 311.
Упрощение схемы пуска двигателя с глухоприсоединенным возбудителем имеет большое практическое значение, однако требует известного сопоставления со схемой пуска на разрядное сопротивление, так как у некоторых двигателей при данной схеме пуска наблюдается провал в асинхронной характеристике двигателя — снижение входного момента при подходе к синхронной скорости. Если прямой пуск двигателей большой мощности недопустим по своему воздействию на сеть, то для уменьшения напряжения в цепь статора низковольтных двигателей включается дополнительное активное сопротивление, как показано на схеме рис. 306, а для высоковольтных индуктивное сопротивление (реакторный пуск) или автотрансформатор (автотрансформаторный пуск — см. главу XXIV, рис. 230).
Эти способы применяются как для асинхронных, так и синхронных двигателей. При автотрансформаторном пуске схема получается сложной и оборудование дорогим. Применять этот способ можно только для весьма ответственных двигателей, когда другие способы пуска невозможны.
Векторное управление электродвигателем «на пальцах» / Хабр
— Что такое векторное управление?
— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду.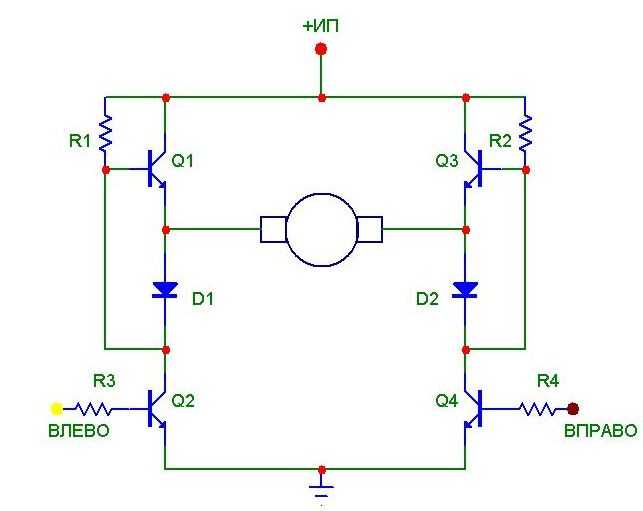 Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для объяснения «на пальцах» можно привести какую-нибудь аналогию.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т. е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т. п.
п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные.
Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Система управления двигателем: описание, характеристики
Изобретение относится к машиностроению, а именно к двигателестроению. Технический результат заключается в возможности снижения неравномерности нагрузки для разных цилиндров многоцилиндрового поршневого двигателя внутреннего сгорания с принудительным воспламенением и распределенным впрыскиванием топлива. Согласно изобретению, регулировка нагрузки на двигатель осуществляется общей на все цилиндры дроссельной заслонкой. При этом индивидуальные впускные трубопроводы отдельных цилиндров оснащены дополнительными дроссельными заслонками, обеспечивающими коррекцию подачи воздуха на основании информации от датчиков свободного кислорода, установленных в индивидуальных выпускных трубопроводах отдельных цилиндров. Регулировка угла опережения зажигания осуществляется индивидуально для каждого цилиндра с помощью датчика детонации.
Согласно изобретению, регулировка нагрузки на двигатель осуществляется общей на все цилиндры дроссельной заслонкой. При этом индивидуальные впускные трубопроводы отдельных цилиндров оснащены дополнительными дроссельными заслонками, обеспечивающими коррекцию подачи воздуха на основании информации от датчиков свободного кислорода, установленных в индивидуальных выпускных трубопроводах отдельных цилиндров. Регулировка угла опережения зажигания осуществляется индивидуально для каждого цилиндра с помощью датчика детонации.
Описание
Системой управления двигателем называется электронная система управления, которая обеспечивает работу двух и более систем двигателя. Система является одним из основных электронных компонентов электрооборудования автомобиля.
Генератором развития систем управления двигателем в мире является немецкая фирма Bosch. Технический прогресс в области электроники, жесткие нормы экологической безопасности обусловливают неуклонный рост числа подконтрольных систем двигателя.
Свою историю система управления двигателем ведет от объединенной системы впрыска и зажигания. Современная система управления двигателем объединяет значительно больше систем и устройств. Помимо традиционных систем впрыска и зажигания под управлением электронной системы находятся: топливная система, система впуска, выпускная система, система охлаждения, система рециркуляции отработавших газов, система улавливания паров бензина, вакуумный усилитель тормозов.
Термином «система управления двигателем» обычно называют систему управления бензиновым двигателем. В дизельном двигателе аналогичная система называется система управления дизелем.
Система управления двигателем включает входные датчики, электронный блок управления и исполнительные устройства систем двигателя.
Входные датчики измеряют конкретные параметры работы двигателя и преобразуют их в электрические сигналы. Информация, получаемая от датчиков, является основой управления двигателем. Количество и номенклатура датчиков определяется видом и модификацией системы управления. Например, в системе управления двигателем Motronic-MED применяются следующие входные датчики: давления топлива в контуре низкого давления, давления топлива, частоты вращения коленчатого вала, Холла, положения педали акселератора, расходомер воздуха (при наличии), детонации, температуры охлаждающей жидкости, температуры масла, температуры воздуха на впуске, положения дроссельной заслонки, давления во впускном коллекторе, кислородные датчики и др. Каждый из датчиков используется в интересах одной или нескольких систем двигателя.
Например, в системе управления двигателем Motronic-MED применяются следующие входные датчики: давления топлива в контуре низкого давления, давления топлива, частоты вращения коленчатого вала, Холла, положения педали акселератора, расходомер воздуха (при наличии), детонации, температуры охлаждающей жидкости, температуры масла, температуры воздуха на впуске, положения дроссельной заслонки, давления во впускном коллекторе, кислородные датчики и др. Каждый из датчиков используется в интересах одной или нескольких систем двигателя.
Электронный блок управления двигателем принимает информацию от датчиков и в соответствии с заложенным программным обеспечением формирует управляющие сигналы на исполнительные устройства систем двигателя. В своей работе электронный блок управления взаимодействует с блоками управления автоматической коробкой передач, системой ABS (ESP), электроусилителя руля, подушками безопасности и др.
Исполнительные устройства входят в состав конкретных систем двигателя и обеспечивают их работу. Исполнительными устройствами топливной системы являются электрический топливный насос и перепускной клапан. В системе впрыска управляемыми элементами являются форсунки и клапан регулирования давления. Работа системы впуска управляется с помощью привода дроссельной заслонки и привода впускных заслонок.
Исполнительными устройствами топливной системы являются электрический топливный насос и перепускной клапан. В системе впрыска управляемыми элементами являются форсунки и клапан регулирования давления. Работа системы впуска управляется с помощью привода дроссельной заслонки и привода впускных заслонок.
Катушки зажигания являются исполнительными устройствами системы зажигания. Система охлаждения современного автомобиля также имеет ряд компонентов, управляемых электроникой: термостат (на некоторых моделях двигателей), реле дополнительного насоса охлаждающей жидкости, блок управления вентилятора радиатора, реле охлаждения двигателя после остановки.
В выпускной системе осуществляется принудительный подогрев кислородных датчиков и датчика оксидов азота, необходимый для их эффективной работы. Исполнительными устройствами системы рециркуляции отработавших газов являются электромагнитный клапан управления подачей вторичного воздуха, а также электродвигатель насоса вторичного воздуха.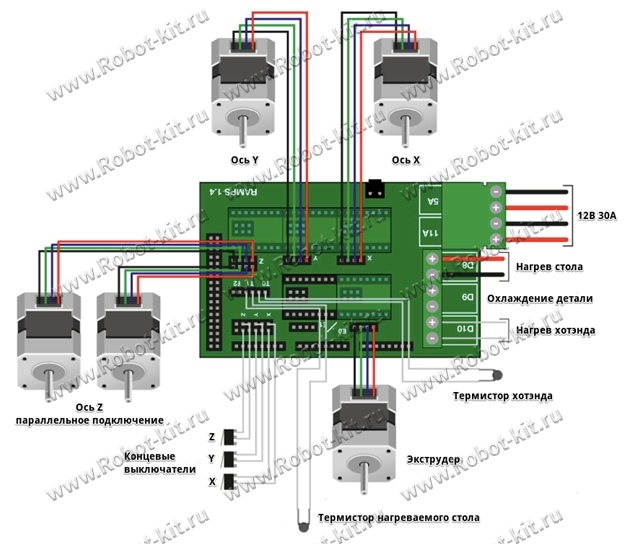 Управление системой улавливания паров бензина производится с помощью электромагнитного клапан продувки адсорбера.
Управление системой улавливания паров бензина производится с помощью электромагнитного клапан продувки адсорбера.
Принцип работы системы управления двигателем основан на комплексном управлении величиной крутящего момента двигателя. Другими словами, система управления двигателем приводит величину крутящего момента в соответствия с конкретным режимом работы двигателя. Система различает следующие режимы работы двигателя:
- запуск;
- прогрев;
- холостой ход;
- движение;
- переключение передач;
- торможение;
- работа системы кондиционирования.
Изменение величины крутящего момента производиться двумя способами — путем регулирования наполнения цилиндров воздухом и регулированием угла опережения зажигания.
Возможные неисправности блока управления ECU
Для того чтобы поставленный новый блок управления устранил причины появляющихся ошибок, необходимо достоверно знать в чем заключается поломка старого ЭБУ.
Электронные модули управления наиболее часто выходят из строя по причине перегрузки напряжения (короткое замыкание в цепи) или из-за постоянного перегрева оборудования, тряски, ударов, коррозии.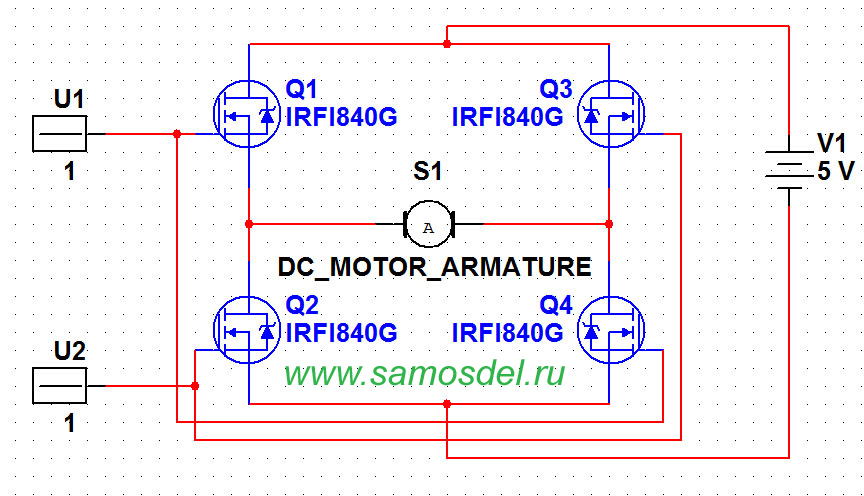 Не устраняя причины короткого замыкания, владелец автомобиля рискует получить в скором времени полностью непригодный к эксплуатации бортовой компьютер.
Не устраняя причины короткого замыкания, владелец автомобиля рискует получить в скором времени полностью непригодный к эксплуатации бортовой компьютер.
Из внешних факторов, которые также могут влиять на работу ЭБУ, стоит обращать внимание на возможное воздействие воды на приборы. Вода может попадать вовнутрь прибора, стимулируя развитие коррозийных процессов и становясь причиной возникновения коротких замыканий. Восстановление модулей управления, на которые оказывала воздействие вода, практически невозможно. Единственно возможный вариант в этом случае — замена ЭБУ. А вот механические повреждения, микротрещины в плате можно устранить силами специалистов.
Основные признаки неисправности ECU
Нет сигнала управления на форсунки, зажигания, бензонасоса, регулятора холостого хода, а также другими исполнительными механизмами. Нет реакции на лямбда — регулировку, ДПДЗ, датчиков температуры, и т.п.
Автодиагностика не определяет (не выходит на связь). Физические повреждения (сгоревшие электронные компоненты, проводники на печатной плате).
Причины возникновения поломки ECU
Вмешательство в электрику автомобиля неквалифицированными «специалистами» при установке сигнализаций или проведении ремонтных работ.
- «Переполюсовка» при присоединении аккумуляторной батареи.
- «Прикуривание» от автомобиля с запущенным мотором.
- Снятие клеммы с аккумулятора на запущенном двигателе.
- Запуск стартера с отключенной силовой шиной;
- Попадание сваркой при выполнении сварочных работ при ремонте на датчики или электропроводку автомобиля.
- Обрыв или замыкание проводки.
- Попадание воды в ECU.
Пробой высоковольтного участка системы зажигания (пробой катушки или высоковольтных проводов на массу) вызывает перегрузку, и как следствие перегорание силовых ключей в блоке управления.
Вид неисправности узлов блока управления практически всегда позволяет предоставить советы по проверке узлов и систем двигателя которые могли вызвать данные поломки, так как между ними существует прямая взаимосвязь.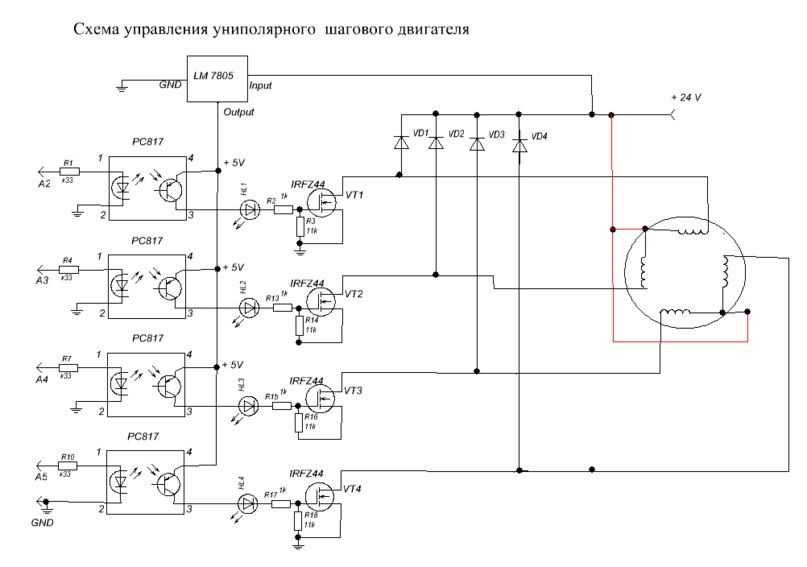 Это АРХИВАЖНЫЙ момент, так как, если блок управления сгорел из-за проблем в электропроводке или исполнительном устройстве, простая замена ECU в 90% случаев может ничего не принести, кроме еще нескольких перегоревших блоков ECU, которые уже обратно никто не примет.
Это АРХИВАЖНЫЙ момент, так как, если блок управления сгорел из-за проблем в электропроводке или исполнительном устройстве, простая замена ECU в 90% случаев может ничего не принести, кроме еще нескольких перегоревших блоков ECU, которые уже обратно никто не примет.
Дистанционное управление двигателем в Украине. Цены на Дистанционное управление двигателем на Prom.ua
Устройство дистанционного управления двигателя с реверсом(ворот, ролеты, шлагбаума) на 220 Вольт
На складе в г. Одесса
Доставка по Украине
560 грн
Купить
дистанционные и автоматические устройства «Эклипс»
Устройство дистанционного управления двигателя с реверсом(ворот, шлагбаума) на 220 Вольт 30 Ампер
На складе в г. Одесса
Доставка по Украине
1 040 грн
Купить
дистанционные и автоматические устройства «Эклипс»
Cycloony MiniBike двигатель 120 кг пульт дистанционного управления белый/синий белый (Германия, читать
Под заказ
Доставка по Украине
от 5 205 грн/ед.
Купить
Интернет-магазин «Hergestellt in Deutschland»
Беспроводной пульт для насоса AC220V 30A 433 МГц реле дистанционного управления БЕЗ ПУЛЬТА
На складе в г. Кривой Рог
Доставка по Украине
289 — 319 грн
от 2 продавцов
319 грн
Купить
Интернет магазин ARDU.NET
Дистанционное управление мотором под троса С2 с подгазовкой push
Доставка по Украине
6 188 грн
6 095 грн
Купить
Интернет-магазин OZERO
Дистанционное управление для 2-х тактного мотора Suzuki с кабелем
Доставка по Украине
11 813 грн
11 635 грн
Купить
Интернет-магазин OZERO
Блок Дистанционного управления мотором (Коммандер)
Доставка по Украине
9 990 грн
Купить
Sierra Marine
Пульт дистанционного управления для моторов Haswing Cayman B GPS
Доставка по Украине
2 983 грн
Купить
Интернет-магазин «Мир лодок»
Пульт дистанционного управления для подвесных двигателей, врезной (хром)
Доставка по Украине
15 750 грн
Купить
Shkiper
Квадрокоптер дрон с камерой и Wi-Fi Navigator Drone 4 двигателя пульт ДУ гироскоп черный (Navigator_1016)
Доставка по Украине
1 792 грн
1 402 грн
Купить
Дистанционное управление Cyclon RD-37A (викидний ключ, сил вих. на сир, габарити, дотяжку, багажник)
на сир, габарити, дотяжку, багажник)
Доставка по Украине
685.60 грн
Купить
KitaiAvto
Блок управления газом электр Mercedes E-class 2.7cdi (W210) 1995-2002 713
Заканчивается
Доставка по Украине
1 050 грн
630 грн
Купить
Авторазборка продажа б/у автозапчастей
Блок управления газом/ реверсом
Доставка по Украине
15 014 — 15 380 грн
от 2 продавцов
15 014 грн
Купить
machinery.in.ua
Блок управления газом/ реверсом
Доставка по Украине
26 443 — 27 088 грн
от 2 продавцов
26 443 грн
Купить
machinery.in.ua
Блок управления газом/ реверсом
Доставка по Украине
10 207 — 15 223 грн
от 2 продавцов
10 207 грн
Купить
machinery.in.ua
Смотрите также
Блок управления газом/ реверсом
Доставка по Украине
4 370 — 4 476 грн
от 2 продавцов
4 370 грн
Купить
machinery. in.ua
in.ua
Плата (блок) управления газ.колонки Ferroli Zefiro C11. Art. 90261430
Доставка по Украине
по 1 722 грн
от 2 продавцов
1 804 грн
Купить
Kotelzip — запчасти для котлов, теплообменники битермические, измерительные приборы и толщиномеры
Розетка-таймер недельный 16А
Доставка по Украине
380 грн
Купить
ФОП Хохлов В.В.
Командер лодочного мотора YAMAHA тип 703, 10 pin, pull
Доставка по Украине
7 849 — 8 311 грн
от 3 продавцов
8 330 грн
Купить
Блок дистанционного управления лодочным мотором (Коммандер) Ch2751P
Доставка по Украине
7 020 грн
Купить
Sierra Marine
Судовой Трос управления газ/реверc CC33011 (11 футов или 3,35 метра)
Доставка по Украине
1 080 грн
Купить
Sierra Marine
Трос управления газ/реверс C5 (21 фут или 6,41 метра)
Заканчивается
Доставка по Украине
700 грн
Купить
Sierra Marine
Судовой трос управления газ/реверс CC33013 (13 футов или 3,96 м)
Доставка по Украине
1 134 грн
Купить
Sierra Marine
Комплект рулевого 10ft управления для лодки Rotary
Доставка по Украине
6 818 грн
6 681 грн
Купить
Интернет-магазин Priliv
Рулевой комплект 11 ft 3.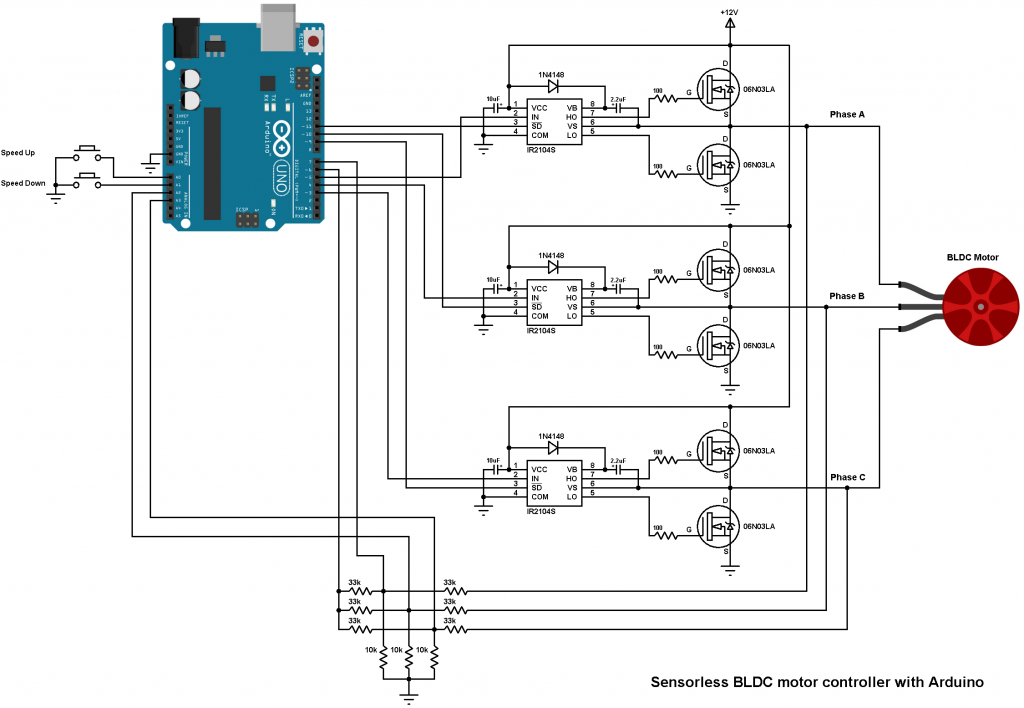 35 м на лодку Pretech
35 м на лодку Pretech
Доставка по Украине
6 818 грн
6 681 грн
Купить
Интернет-магазин Priliv
Комплект рулевого 12ft управления для лодки Rotary
Доставка по Украине
6 818 грн
6 681 грн
Купить
Интернет-магазин Priliv
Комплект рулевого 13ft управления для лодки Rotary
Доставка по Украине
6 818 грн
6 681 грн
Купить
Интернет-магазин Priliv
Комплект рулевого 15ft управления для лодки Rotary
Доставка по Украине
7 499 грн
7 349 грн
Купить
Интернет-магазин Priliv
Комплект рулевой лодочный 24 ft 3000 Rotary
Доставка по Украине
7 650 грн
7 574 грн
Купить
Vkladovke.com.ua
Индикатор управления двигателем: 5 основных причин появления желтого индикатора двигателя
Советы и рекомендации
- Главная
- Автомобильные технологии
На приборной панели замигала желтая сигнальная лампа двигателя? Не волнуйтесь, паниковать не нужно!
by Charlie Harvey
22 июня 2022 г.
22 июня 2022 г.
Возможно, вам знакомо чувство утопания, которое возникает, когда загорается страшная сигнальная лампа двигателя. Обычно это желтый свет, который расположен внутри или вокруг приборов за рулевым колесом и появляется, когда датчики автомобиля обнаруживают проблему с двигателем или другой частью ходовой части.
Моя машина не заводится: почему, что делать и устранение неполадок
В большинстве автомобилей сигнальная лампа на приборной панели обычно является первым признаком того, что под капотом что-то не так. Предупреждение предназначено для того, чтобы предупредить вас о потенциальной проблеме с вашим автомобилем как можно раньше, чтобы предотвратить дальнейшее повреждение двигателя или других связанных с ним частей. Желтая сигнальная лампа двигателя является наиболее распространенным из этих предупреждений и иногда также упоминается как индикатор «проверьте двигатель» или индикатор «управления двигателем».
Что такое сигнальная лампа системы управления двигателем?
Сигнальная лампа системы управления двигателем отличается от других ламп на приборной панели тем, что не указывает на конкретную неисправность. В отличие от предупреждения о температуре охлаждающей жидкости или предупреждения о низком уровне масла, индикатор управления двигателем (EML) является скорее общим сигналом о том, что что-то не так, и может срабатывать по ряду причин.
Мигающая или непрерывная сигнальная лампа может указывать на то, что двигатель работает неправильно. EML, обычно представляемый для изображения стилизованного блока двигателя, но иногда принимающий форму сообщения «проверьте двигатель», будет подсвечиваться как подсказка о необходимости обратиться за дополнительной помощью. В большинстве случаев автомобиль необходимо подключить к диагностическому оборудованию, чтобы точно определить, в чем заключается неисправность. Это можно сделать в любом хорошем сервисном центре или на обочине дороги, если он есть у вашей службы помощи при поломках.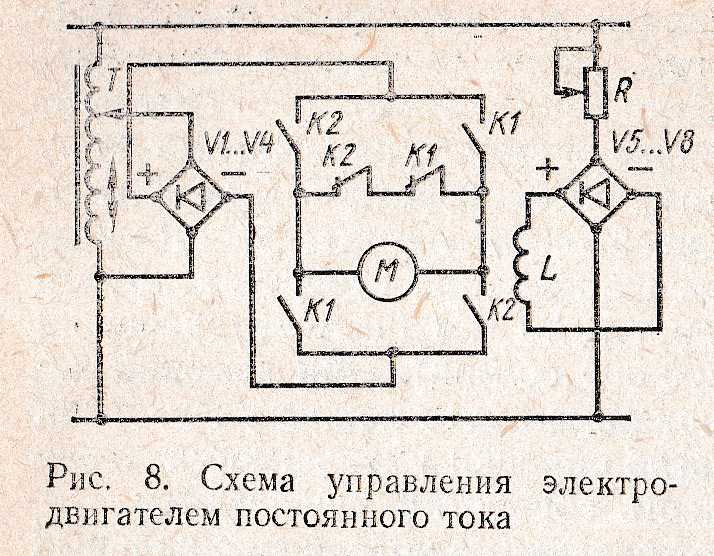
Некоторые старые автомобили могут мигать индикатором «проверить двигатель» определенное количество раз, в зависимости от проблемы. В этих случаях подсчет количества миганий перед короткой паузой может относиться к коду ошибки, который можно найти в руководстве по эксплуатации автомобиля, чтобы узнать, что не так.
Во многих случаях освещение работает на основе цветовой кодировки. Желтый EML не обязательно указывает на разворачивающуюся чрезвычайную ситуацию — вы должны быть в состоянии продолжить свой путь и обратиться за советом, как добраться до пункта назначения. Красный свет, тем не менее, предполагает, что вы должны остановиться там, где это безопасно, и договориться о том, чтобы вашу машину доставили в гараж. Дальнейшее движение на красный свет потенциально может привести к дорогостоящему повреждению. Проблемы с сигнальной лампой двигателя могут быть связаны с неисправностями в системе контроля выбросов, поэтому стоит обратиться за помощью как можно раньше.
Пройдет ли мой автомобиль техосмотр с сигнальной лампой двигателя?
В 2018 году были введены более строгие правила технического обслуживания, означающие, что любой автомобиль, проходящий техосмотр с горящим индикатором управления двигателем (будь то красный или желтый сигнал предупреждения), автоматически выходит из строя.
Перед тем, как отвезти автомобиль на техосмотр, стоит убедиться, что при запуске двигателя все сигнальные лампы гаснут; это нормально, когда индикатор управления двигателем загорается вместе с зажиганием перед запуском, но он всегда должен гаснуть, когда автомобиль работает.
Как сбросить индикатор управления двигателем
Хотя в документации к некоторым старым автомобилям содержатся инструкции о том, как проверить и сбросить сигнальные лампы двигателя, сейчас это обычно невозможно; в наши дни вам обычно нужно отвезти машину к специалисту по ремонту, который может диагностировать проблему и сбросить свет. Вы можете приобрести собственные диагностические считыватели автомобилей, цены на которые зависят от марки и возможностей. Тем не менее, стоит заплатить за точную диагностику, поскольку вы можете пренебречь жизненно важной проблемой, которая требует полного и эффективного ремонта.
Причины неисправности системы управления двигателем
Список возможных триггеров для EML длинный, но вот пять наиболее частых причин:
Неисправность системы очистки отработавших газов
Снижение выбросов выхлопных газов двигателя является одной из самых сложных задач с которыми сталкивается производитель при проектировании нового автомобиля.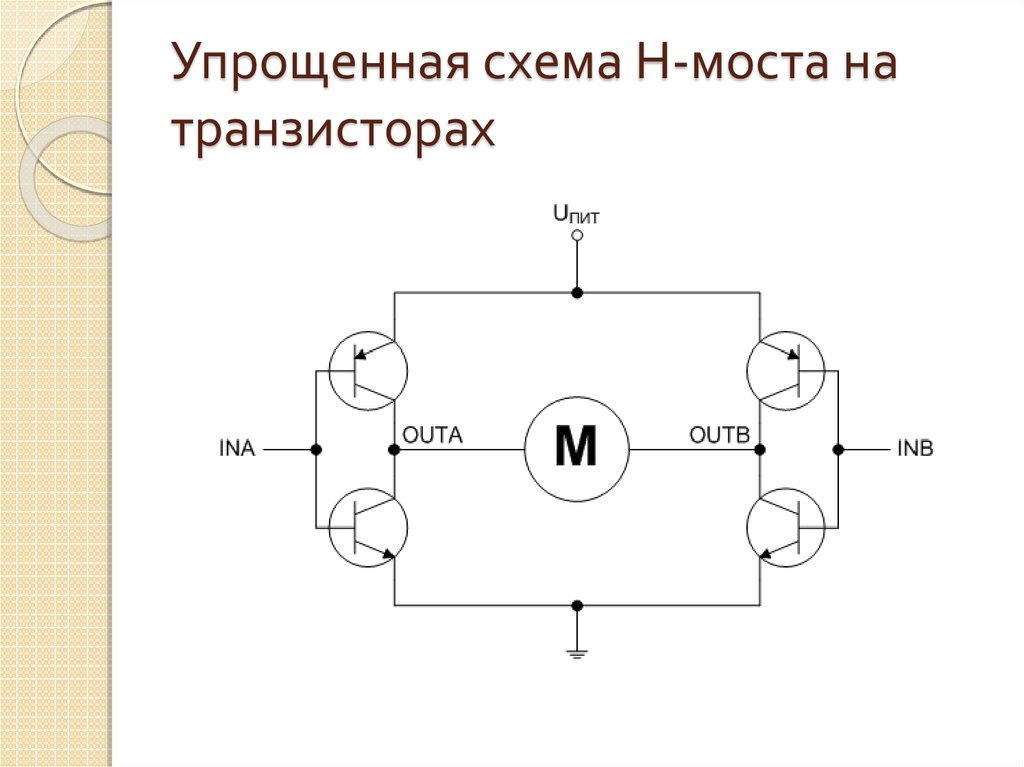 Никто не хочет чрезмерно загрязнять окружающую среду, но в равной степени никто не хочет машину, которая ужасно задушена и не может нормально управляться. Чтобы автомобиль по-прежнему доставлял удовольствие от вождения, при этом предотвращая или уменьшая выбросы вредных газов, производители используют различные системы управления для управления тем, что выходит из выхлопных газов.
Никто не хочет чрезмерно загрязнять окружающую среду, но в равной степени никто не хочет машину, которая ужасно задушена и не может нормально управляться. Чтобы автомобиль по-прежнему доставлял удовольствие от вождения, при этом предотвращая или уменьшая выбросы вредных газов, производители используют различные системы управления для управления тем, что выходит из выхлопных газов.
Одним из ключевых компонентов является кислородный датчик, и многие автомобили имеют более одного датчика. Он измеряет количество несгоревшего кислорода, проходящего через выхлоп автомобиля, что может указывать на то, сжигает ли двигатель слишком много или слишком мало топлива. Если из выхлопных газов выходит слишком мало кислорода, двигатель будет работать «на обогащение» — в цилиндры будет поступать слишком много топлива и недостаточно воздуха.
EML, вызванный датчиком кислорода, может означать, что автомобиль работает слишком богато или слишком бедно, или может быть вызван неисправностью самого датчика. Чтобы исправить эту ошибку, может потребоваться перепрограммирование или повторная калибровка блока управления двигателем (ECU) или, иногда, замена кислородного датчика.
Чтобы исправить эту ошибку, может потребоваться перепрограммирование или повторная калибровка блока управления двигателем (ECU) или, иногда, замена кислородного датчика.
Стоит отметить, что через несколько лет автомобили, не прошедшие техосмотр, могут моментально не пройти ТО. Новый стандарт выбросов Евро-7 должен ввести правила, которые подвергают автомобили регулярной проверке на выбросы, считая те, которые не могут отфильтровать достаточное количество вредных газов, непригодными для эксплуатации.
Засорен сажевый фильтр или неисправность датчика дифференциального давления
Некоторые автомобили с дизельным двигателем имеют специальную сигнальную лампу для дизельного сажевого фильтра (DPF), в то время как другие не имеют и полагаются на предупреждение EML. Последний иногда также загорается, если автомобиль обнаруживает неисправность датчика перепада давления, который определяет, насколько эффективно работает DPF.
Проще говоря, это устройство, измеряющее способность газа проходить по выхлопу, в том числе через сажевый фильтр. Это функция, установленная на дизельных автомобилях, которая удаляет канцерогенные частицы из выхлопных газов, предотвращая их загрязнение атмосферы.
Это функция, установленная на дизельных автомобилях, которая удаляет канцерогенные частицы из выхлопных газов, предотвращая их загрязнение атмосферы.
Эти частицы принимают форму сажи, и со временем фильтр настолько сильно забивается частицами, что выхлопные газы с трудом проходят через него. Когда датчик перепада давления определяет, что эта точка почти достигнута, двигатель начинает процесс, называемый регенерацией DPF.
При этом автомобиль сжигает дополнительное топливо для повышения температуры сажевого фильтра. Когда становится достаточно жарко, частицы сгорают или окисляются, поэтому они могут безвредно пройти через выхлоп в виде тонкой золы.
EML (или иногда отдельный индикатор DPF) может загораться, если этот процесс регенерации не происходит. Дизельные автомобили, которые используются только для редких местных поездок, никогда не достигают обычной рабочей температуры, что является одним из условий, необходимых для начала регенерации. Если DPF не может регенерироваться, он блокируется, что означает, что двигатель не может нормально дышать.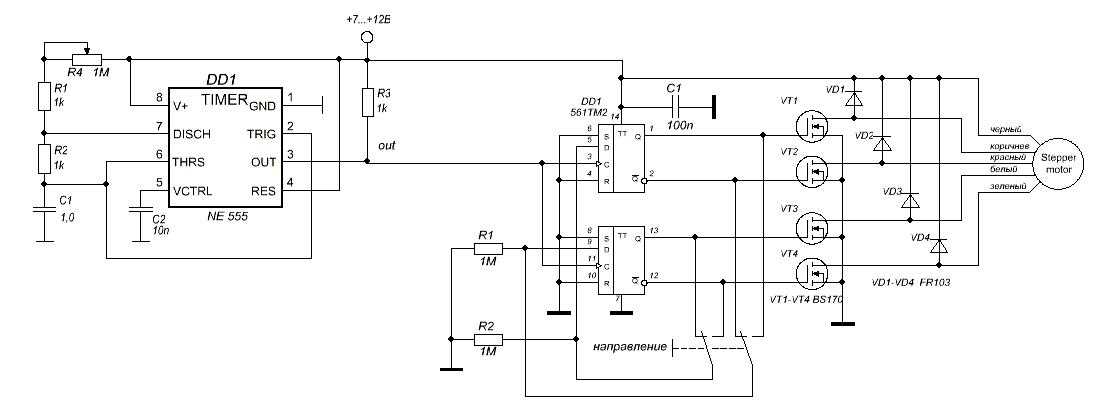 Если у вас есть дизельный автомобиль, который вы обычно используете только для коротких поездок, мы рекомендуем брать его с собой на более длительные поездки, если это возможно, чтобы избежать возникновения проблем такого типа, или заменить его на автомобиль, работающий на бензине или электричестве.
Если у вас есть дизельный автомобиль, который вы обычно используете только для коротких поездок, мы рекомендуем брать его с собой на более длительные поездки, если это возможно, чтобы избежать возникновения проблем такого типа, или заменить его на автомобиль, работающий на бензине или электричестве.
Однако неисправный датчик перепада давления также может вызывать те же симптомы. Если он выдает неверные показания или вообще ничего не показывает, ЭБУ не знает точно, насколько заполнен DPF автомобиля. Затем он может иногда запускать режим низкого энергопотребления (или аварийный режим), чтобы избежать риска повреждения, пока неисправность не будет исследована.
Если фильтр DPF засорился, мастерская должна иметь возможность выполнить «принудительную регенерацию» с использованием диагностического оборудования для прямой связи с двигателем. Однако его первая задача — убедиться, что датчик дифференциального давления обеспечивает точные показания.
Датчик массового расхода воздуха
Датчик массового расхода воздуха (иногда называемый термопленочным датчиком массового расхода воздуха, датчиком массового расхода воздуха, датчиком массового расхода воздуха или MAF) жизненно важен для эффективной работы двигателя. В своих камерах сгорания двигатель сжигает смесь топлива и воздуха. ЭБУ (электронный блок управления) использует данные датчика массового расхода воздуха, чтобы рассчитать, сколько топлива нужно добавить в камеры сгорания, чтобы соответствовать количеству воздуха, поступающего в двигатель.
В своих камерах сгорания двигатель сжигает смесь топлива и воздуха. ЭБУ (электронный блок управления) использует данные датчика массового расхода воздуха, чтобы рассчитать, сколько топлива нужно добавить в камеры сгорания, чтобы соответствовать количеству воздуха, поступающего в двигатель.
Без этой информации он может только догадываться. Современный ECU всегда будет иметь «безопасный» набор параметров, который он может принять, чтобы поддерживать работу автомобиля в случае возникновения неисправности. Это часто называют «режимом бездействия» и иногда он может быть вызван неточными или отсутствующими данными с датчика массового расхода воздуха. В этом случае вы можете заметить потерю мощности и/или отсутствие отклика при нажатии на педаль акселератора.
Датчик массового расхода воздуха установлен в верхней части двигателя, где он находится на пути воздуха, только что прошедшего через воздушный фильтр двигателя. Неправильно установленный (или отсутствующий) воздушный фильтр может повредить датчик, позволив вредным частицам вступить в контакт с ним.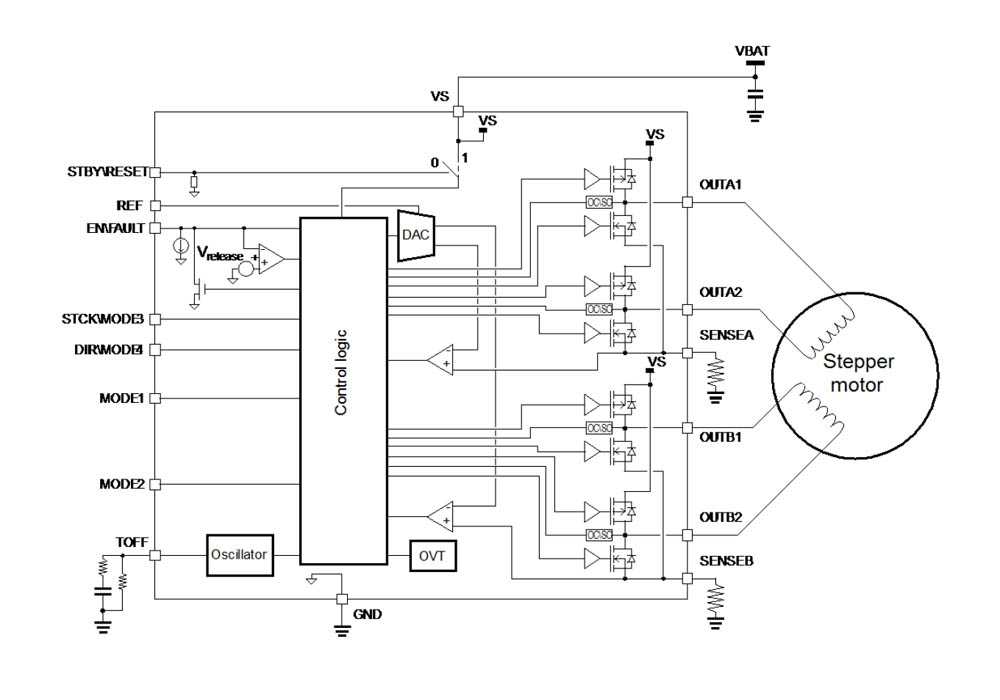
В качестве альтернативы, засоренный воздушный фильтр, не пропускающий достаточно воздуха, вызовет предупреждение о том, что двигатель принудительно работает на обогащенной смеси. Независимо от того, отсутствует ли сигнал, подаваемый датчиком массового расхода воздуха, или он выходит за пределы нормальных параметров, эффект будет одинаковым — сигнальная лампа двигателя.
Неисправность системы зажигания
Хотя многие люди называют кнопку стартера или ключ зажиганием своего автомобиля — это сокращение от «выключатель зажигания» — система зажигания автомобиля представляет собой гораздо больше, чем просто то, как она включается и выключается. Система зажигания отвечает за фактическое сжигание или «воспламенение» топлива, которое заставляет двигатель работать.
В бензиновом автомобиле смесь топлива и воздуха в виде пара нагнетается в камеры сгорания, где она быстро сгорает в результате небольшого контролируемого взрыва, запускаемого искрой. Эта искра обеспечивается свечой зажигания, которая является компонентом системы зажигания.
В дизельном автомобиле происходит тот же основной процесс, но для сгорания не требуется искра. Вместо этого смесь дизельного топлива и воздуха воспламеняется от сжатия воздействующего на нее поршня. Однако, когда вы запускаете дизельный двигатель в холодный день, компонент, называемый свечой накаливания, нагревает камеру сгорания перед добавлением топливно-воздушной смеси, облегчая сгорание.
Питание свечей накаливания дизельного двигателя и свечей зажигания бензинового двигателя обеспечивается системой зажигания автомобиля. В бензиновых автомобилях для создания искры, воспламеняющей топливо, требуется очень высокое напряжение. Это обеспечивается катушками двигателя. Многие современные автомобили имеют катушку для каждого цилиндра, и если эта катушка выходит из строя, топливо в этом цилиндре не будет эффективно сгорать, что не только приводит к неровной работе двигателя или снижению мощности, но также может привести к повреждению вашего автомобиля. каталитический нейтрализатор выхлопной системы.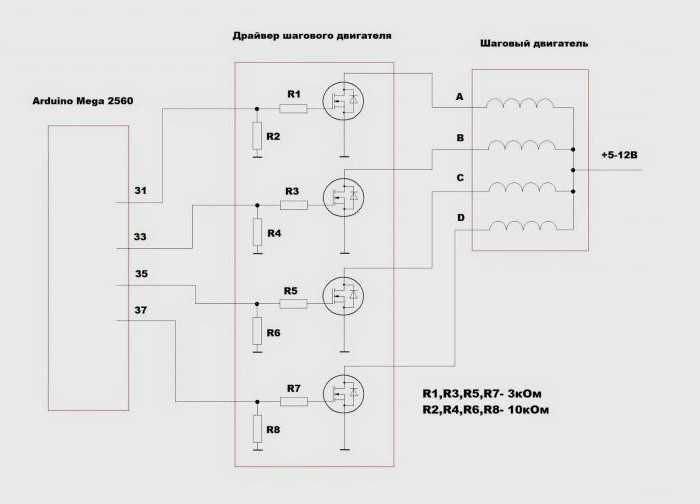
В то время как неисправность свечи накаливания обычно сигнализируется отдельной сигнальной лампой в дизельном автомобиле (обычно закрученная линия, напоминающая насекомое с усиками), проблемы со свечами зажигания и катушками зажигания бензинового автомобиля и проводкой между ними обычно подпадает под действие EML. Подобные неисправности обычно называют «осечками зажигания», и ремонт часто включает замену одной или нескольких свечей зажигания, проводов свечей зажигания или катушек.
Незакрепленная крышка заливной горловины для бензина или дизельного топлива
Последняя запись в нашем списке может быть одной из самых неприятных, хотя обычно она приносит некоторое облегчение, когда обнаруживается, что именно она является причиной срабатывания EML.
В следующий раз, когда вы откроете крышку топливного бака, прислушайтесь к выбросу воздуха. Это вызвано повышением давления воздуха или вакуума в топливном баке. Топливный бак — это не простая емкость с подающей трубой к двигателю, а сложная система, находящаяся под давлением.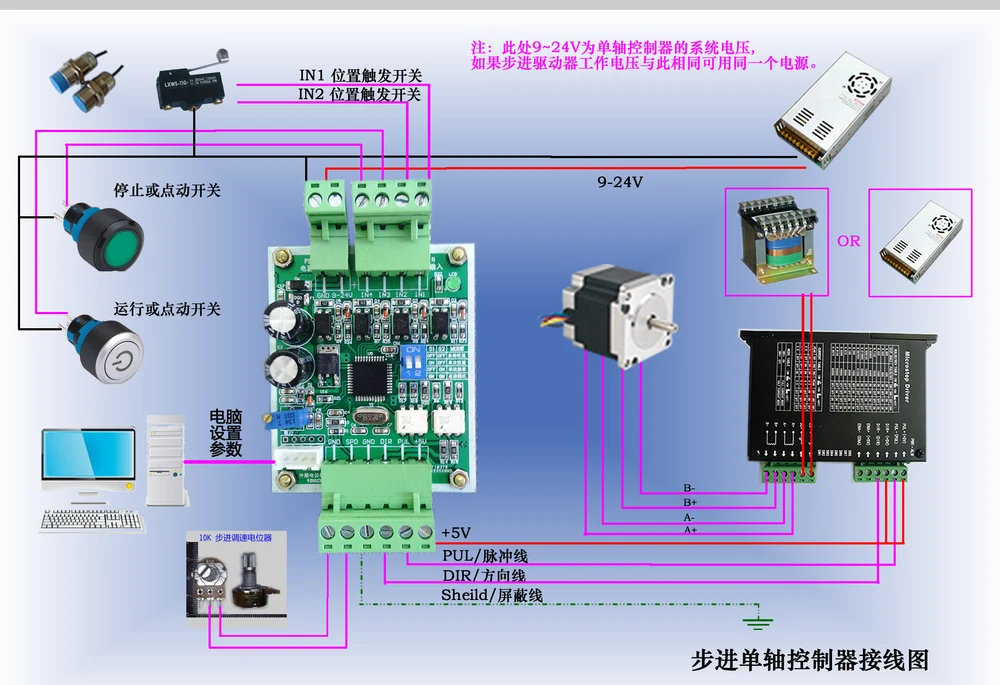 Топливо выкачивается из бака к двигателю, и по мере выкачивания топлива, если его место не займет воздух, бак просто сомнется, как пустая банка из-под напитков.
Топливо выкачивается из бака к двигателю, и по мере выкачивания топлива, если его место не займет воздух, бак просто сомнется, как пустая банка из-под напитков.
Топливный бак имеет вентиляционное отверстие, которое позволяет дозированному количеству воздуха снаружи заменять топливо, когда оно выкачивается из бака. Воздух попадает в бак на основе показаний датчика давления воздуха в топливном баке, который может учитывать такие вещи, как температура, которая также может влиять на давление воздуха в баке. Если датчик давления в топливном баке не может обеспечить точные показания, он обычно включает сигнальную лампу двигателя.
Однако показания датчика могут быть надежными только в том случае, если система топливного бака на 100% герметична, а воздух может поступать и выходить из бака только через контролируемые вентиляционные отверстия. Одной из распространенных причин утечки воздуха в бензобак или из него является негерметичная крышка топливного бака.
Это одна из самых дешевых в устранении неисправностей, которая может вызвать EML, при этом замена крышки топливного бака обычно стоит около 10 фунтов стерлингов.
Автомобильные технологии стали проще
- Автомобильные фары и фары: полное руководство
- Автомобильные камеры: как камеры делают автомобили безопаснее
- Видеорегистраторы: что это такое и как они работают?
- Что такое круиз-контроль и адаптивный круиз-контроль?
- Электронные ручные тормоза и Auto-hold: полное руководство
- Что такое автомобильный иммобилайзер и есть ли он в моей машине?
- Что такое алькантара ?
- Что такое собственный вес?
- Что такое колесо для экономии места?
- Что такое рекуперативное торможение?
- Что такое полная масса автомобиля?
- Что такое Bluetooth?
- Что такое прокладка ГБЦ?
- Что такое свечи зажигания и свечи накаливания?
- Что такое тормозные колодки и диски?
- Что такое нагнетатель?
- Что такое поясничная поддержка?
- Что такое выхлопная система автомобиля и что может выйти из строя?
- Что такое пневмоподвеска и как она работает?
- Что такое адаптивные амортизаторы и как они работают?
- Что такое бесключевой доступ и бесключевой запуск?
- Объяснение eCall
- Что такое проекционный дисплей?
- Что такое Waze?
- Что такое Mirrorlink?
- Что такое what3words?
Рекомендуемый
Буксировка электромобилем, гибридом или подключаемым гибридом — какая грузоподъемность и можно ли буксировать караван?
Советы и рекомендации
15 сент. 2022
2022
15 сент. 2022
Буксировка электромобилем, гибридом или подключаемым гибридом — какая грузоподъемность и можно ли буксировать караван?
Как избежать кражи автомобиля без ключа
Советы и рекомендации
29 июля 2022
29 июля 2022
Как избежать безразличных входных автомобилей
Как продлить водительские права или изменить адрес
Советы и советы
11 июля 2022
11 июля 2022
11 июля 2022
11 июл. 2022
Как обновить водительские права или изменить адрес
Что такое ограничители скорости?
Советы и рекомендации
7 июля 2022 г.
7 июля 2022 г.
Что такое ограничители скорости?
Самый популярный
Лучшие новые автомобильные предложения 2022: Top Car на этой неделе
Сделки
16 сентября 2022
16 Sep 2022
Лучшие новые автомобильные сделки 2022: на этой неделе Топ -автомобиль
. MG ZS EV второго поколения будет высокотехнологичным электрическим внедорожником за 30 тысяч фунтов стерлингов
Vauxhall launches GSe badge for hot future EVs
News
14 Sep 2022
14 Sep 2022
Vauxhall launches GSe badge for hot future EVs
Tips & advice
View All
Car dashboard сигнальные лампы: полное руководство
Советы и рекомендации
23 марта 2022 г.
23 марта 2022 г.
Сигнальные лампы на приборной панели автомобиля: полное руководство
Зарядные станции для электромобилей: полное руководство
Советы и рекомендации
5 ноября 2021 г.
5 ноября 2021 г.
Зарядные станции для электромобилей: полное руководство
PCP или HP — какой тип финансирования автомобиля вам подходит?
Покупка автомобиля
17 мая 2022 г.
17 мая 2022 г.
PCP или HP — какой тип финансирования автомобиля вам подходит?
Камеры средней скорости: как они работают?
Советы и советы
20 июня 2022 г.
20 июн 2022
Камеры средней скорости: как они работают?
Лучшие автомобили
Просмотр All
Top 10 Best Car Interiors 2022
Лучшие автомобили
25 июня 2021
25 июня 2021
Топ 10 1022 92222221
Топ 10 1022 92222221
Топ 10 1022 92222229
.
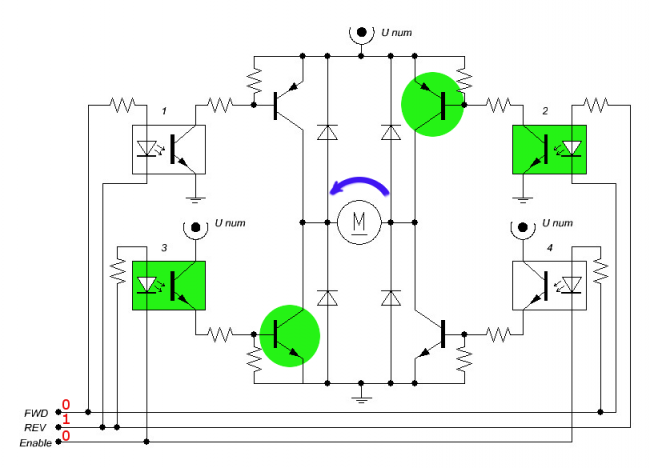
Лучшие автомобили
12 июл 2022
12 июл 2022
10 лучших электромобилей 2022
10 лучших дешевых в эксплуатации автомобилей 2022
Best cars
12 Jul 2022
12 Jul 2022
Top 10 best cheap-to-run cars 2022
The UK’s top 10 fastest hot hatchbacks 2022
Hot hatches
24 Jun 2022
24 июня 2022
Топ-10 самых быстрых горячих хэтчбеков Великобритании 2022
Системы управления двигателем
Особенности электронных систем управления двигателем от Bosch
Технологии систем управления двигателем для двухколесных транспортных средств
Системы управления двигателем от Bosch обеспечивают точное централизованное управление всеми функциями, важными для работы двигателя, что приводит к снижению выбросов, повышению безопасности, комфорта и более приятной динамичной езде.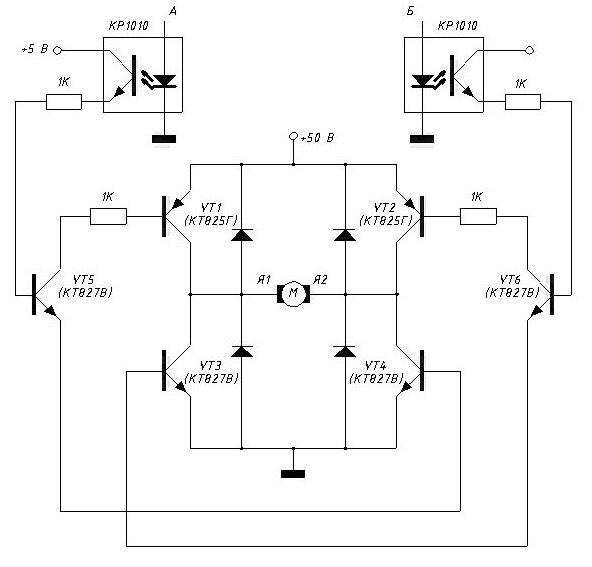 Электронное управление позволяет эффективно сжигать топливо. Системы управления двигателем могут точно контролировать количество впрыскиваемого топлива, а также момент зажигания. Эта технология также дает возможность управлять двигателем, отслеживая обратную связь с автомобилем и соответствующим образом адаптируясь — в зависимости от значения лямбда регулирование форсунки обеспечивает оптимальное сочетание воздуха и топлива.
Электронное управление позволяет эффективно сжигать топливо. Системы управления двигателем могут точно контролировать количество впрыскиваемого топлива, а также момент зажигания. Эта технология также дает возможность управлять двигателем, отслеживая обратную связь с автомобилем и соответствующим образом адаптируясь — в зависимости от значения лямбда регулирование форсунки обеспечивает оптимальное сочетание воздуха и топлива.
Bosch предлагает полный спектр технологий систем управления двигателем, специально разработанных для двухколесных транспортных средств. Сюда входят компоненты для впрыска и подачи топлива, управления подачей воздуха, зажигания и очистки отработавших газов, а также блоки управления двигателем. Полное электронное управление двигателем в сочетании со сложными датчиками обеспечивает значительные преимущества по сравнению с обычными карбюраторными системами, начиная от интеллектуального управления впрыском топлива и заканчивая улучшенными показателями выбросов.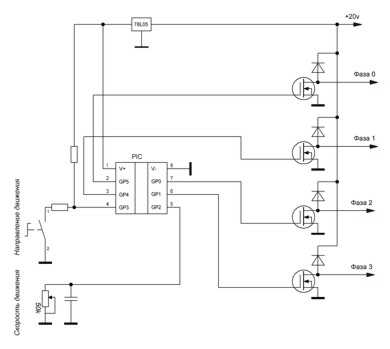
Дополнительные компоненты
Лямбда-зонд мини с подогревом
Лямбда-зонд
Маленькие и мощные мотоциклы — Лямбда-зонд измеряет содержание кислорода в выхлопных газах и помогает оптимизировать соотношение воздух/топливо. Лямбда-зонд мини с подогревом был разработан специально для нужд двухколесных транспортных средств. Резьба M12 и оптимальная конструкция защитной трубки обеспечивают компактную установку с оптимизированной мощностью нагревателя для двухколесных транспортных средств. Планируемый срок службы около 100 000 км.
Лямбда-зонд
Лямбда-зонд
Маленькие и высокопроизводительные мотоциклы — Лямбда-зонд реагирует на переход от бедной смеси к богатой (и/или от богатой к обедненной) немедленным скачком выходного сигнала. Измеряя содержание кислорода в выхлопных газах, блок управления двигателем получает необходимую информацию для регулирования соотношения воздух/топливо в камере сгорания.
Измеряя содержание кислорода в выхлопных газах, блок управления двигателем получает необходимую информацию для регулирования соотношения воздух/топливо в камере сгорания.
Датчик частоты вращения коленчатого вала
Датчик частоты вращения коленчатого вала
Маленькие велосипеды и высокопроизводительные велосипеды — Датчик частоты вращения коленчатого вала измеряет скорость, положение и, опционально, направление вращения коленчатого вала. Эти данные используются системами управления двигателем для управления опережением впрыска и/или зажигания. Датчик представляет собой датчик Холла или индуктивный датчик. На коленчатом валу установлено целевое колесо, которое датчик сканирует бесконтактным методом. Контрольная точка определяется недостающим элементом в импульсном колесе. Благодаря высокой точности датчик частоты вращения коленчатого вала помогает снизить выбросы и расход топлива.
Датчик частоты вращения распределительного вала
Датчик частоты вращения распределительного вала
Высокопроизводительные мотоциклы — В качестве бесконтактного датчика Холла датчик частоты вращения распределительного вала измеряет положение распределительного вала и помогает снизить выбросы и расход топлива благодаря высокой точности.
Датчик детонации
Датчик детонации
Высокопроизводительные велосипеды — Датчик детонации монтируется на картере и измеряет структурный шум с помощью пьезоэлектрического чувствительного элемента. Стук обнаруживается с его характерными частотами и преобразуется датчиком в электрические сигналы, которые подаются на блок управления. Датчик детонации помогает снизить расход топлива и, следовательно, CO 2 выбросы.
Датчик температуры
Датчик температуры
Маленькие и мощные мотоциклы — Датчик температуры измеряет температуру охлаждающей жидкости, масла или топлива. Эта информация используется для улучшения возможностей холодного пуска, а также для охлаждения и защиты двигателя. Датчик температуры помогает управлять различными функциями, такими как холодный пуск, для более безопасной и комфортной работы двигателя.
Модуль подачи топлива
Модуль подачи топлива
Маленькие и мощные мотоциклы — Модуль подачи топлива встроен в топливный бак. Его задачей является подача нужного количества топлива из бака к топливной форсунке.
Механический блок дроссельной заслонки (только лицензирование)
 open[7], ‘accordion-item’: !status.open[7]}»/>
open[7], ‘accordion-item’: !status.open[7]}»/>Механический блок дроссельной заслонки (только лицензия)
Небольшие велосипеды — Механический блок дроссельной заслонки регулирует подачу воздуха в цилиндр, уменьшая или увеличивая поперечное сечение впускного коллектора для эффективной, экономичной и динамичной работы двигателя.
Корпус электронной дроссельной заслонки
Корпус электронной дроссельной заслонки
Высокопроизводительные велосипеды — Корпус электронной дроссельной заслонки состоит из корпуса дроссельной заслонки с электрическим приводом и бесконтактного датчика углового положения для обратной связи по положению. Электронная система управления двигателем электрически приводит в действие корпус дроссельной заслонки. Входными переменными триггера являются положение рукоятки акселератора и требования систем, которые могут влиять на крутящий момент двигателя, включая систему контроля устойчивости мотоцикла (MSC).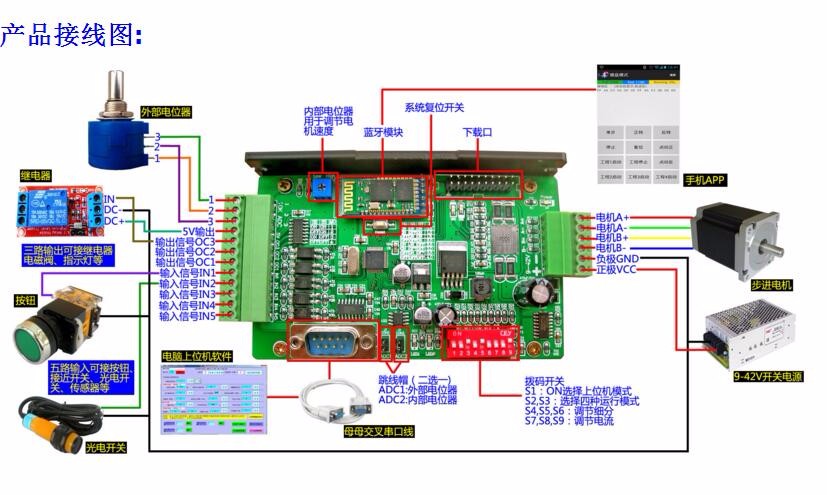 Конструкция корпуса электронной дроссельной заслонки оптимизирована для соответствия требованиям по весу и размеру для двухколесных транспортных средств.
Конструкция корпуса электронной дроссельной заслонки оптимизирована для соответствия требованиям по весу и размеру для двухколесных транспортных средств.
Датчик давления и температуры воздуха в коллекторе
Датчик давления и температуры воздуха во впускном коллекторе
Высокопроизводительные мотоциклы — Датчик давления и температуры воздуха в коллекторе измеряет давление и температуру воздуха во впускном коллекторе. Микромеханический датчик содержит пьезорезистивный чувствительный элемент, генерирующий измеряемое электрическое напряжение при приложении давления. Атмосферное давление можно измерить по напряжению. Датчик обеспечивает оптимизированную топливно-воздушную смесь для более эффективного сгорания.
Датчик положения дроссельной заслонки
Датчик положения дроссельной заслонки
Маленькие велосипеды — Датчик положения дроссельной заслонки измеряет угол поворота дроссельной заслонки на бензиновых двигателях.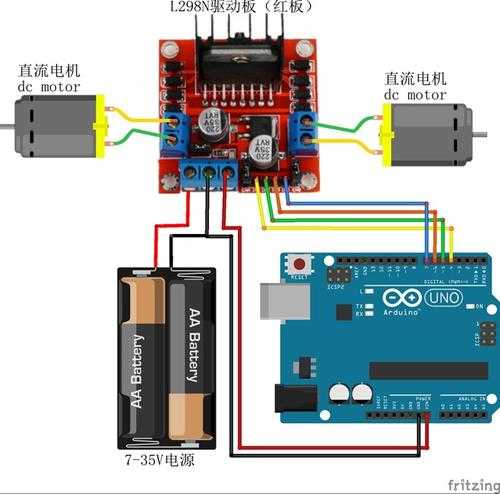 Сигнал датчика положения дроссельной заслонки используется для улучшения предсказания заполнения.
Сигнал датчика положения дроссельной заслонки используется для улучшения предсказания заполнения.
Системы управления двигателем Boxberg езда событие
ECU 101: Описание систем управления двигателем
Во многих современных автомобилях все больше и больше систем управляются микропроцессорами. Поскольку технологически продвинутые датчики способны измерять различные условия работы двигателя и вождения «на лету», входные данные от этих датчиков собираются, анализируются и передаются на главный компьютер. Этот главный компьютер, блок управления двигателем (ECU) или модуль управления двигателем (ECM), обрабатывает полученную информацию и отправляет соответствующие выходные сигналы на оборудование двигателя, которым он управляет. В некоторых случаях сигналы отправляются в другие компьютерные подсистемы для дальнейшей обработки.
У вас могут быть все нужные детали для создания мощности, но если настройка не оптимизирована, вы будете страдать от снижения мощности, низкого расхода топлива и даже можете повредить двигатель. Нет ничего более важного для работы двигателя, чем количество подаваемого топлива и время зажигания свечи зажигания.
Нет ничего более важного для работы двигателя, чем количество подаваемого топлива и время зажигания свечи зажигания.
Текст Ричарда Фонга и Арнольда Эудженио // Фото сотрудников DSPORT
ДСПОРТ Выпуск #148
Ваш электронный блок управления и вы
Заводские системы управления двигателем регулируют подачу топлива и момент зажигания на основе данных, собранных множеством датчиков, контролирующих двигатель. Данные считываются системой и отправляются в блок управления двигателем, где его входные данные подключаются к настроенной на заводе матрице, которая определяет выходные элементы управления, которые должны быть отправлены на различные жесткие компоненты в системах подачи топлива и зажигания. Матрица фактически представляет собой комбинацию нескольких массивов данных, характерных для каждого управляемого компонента; Данные управления топливной форсункой берутся из одного массива, управление опережением зажигания — из другого.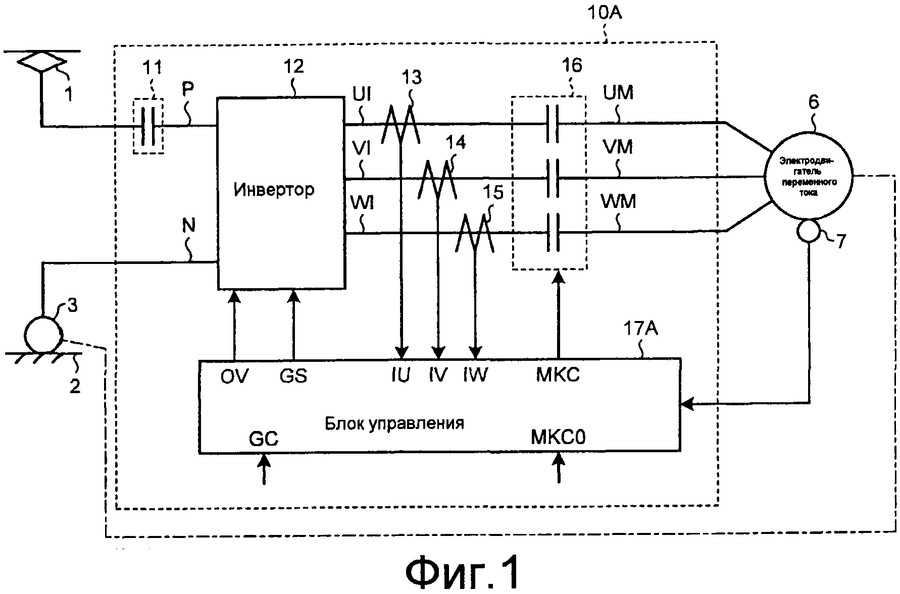
Эти массивы, в свою очередь, объединяются с другими массивами, содержащими параметры для конкретных условий, считываемые рядом других датчиков, установленных на двигателе. Как правило, эти датчики включают в себя; частота вращения двигателя (об/мин), датчик скорости автомобиля, кислородный датчик, датчик давления воздуха в коллекторе, положение дроссельной заслонки, а также температура охлаждающей жидкости и масла, температура всасываемого воздуха и многое другое.
Некоторые устройства OBD-II, такие как FLASHPRO от Hondata, не только позволяют перепрошивать ЭБУ, но также имеют беспроводную связь Bluetooth для доступа к данным и очистки кодов CEL.
Микросхема ПЗУ на плече
Некоторые старые ЭБУ содержали микросхемы памяти, которые нельзя было перезаписать. Единственным доступным вариантом изменения карт топлива и зажигания была покупка микросхемы памяти (или ЭБУ с новой микросхемой памяти), в которую были предварительно загружены измененные данные карты с помощью дорогостоящего программного и аппаратного обеспечения для записи в промышленную память.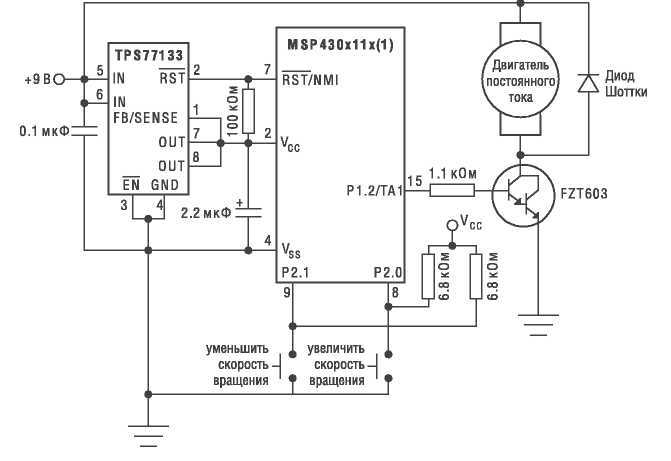 Это то, что обычно называют «чипированным» ЭБУ. На рынке все еще есть производители, которые предоставляют чип или услуги по замене старых платформ.
Это то, что обычно называют «чипированным» ЭБУ. На рынке все еще есть производители, которые предоставляют чип или услуги по замене старых платформ.
Настройка ПЗУ обеспечивает аналогичную функцию; это позволяет тюнеру изменять карты в ECU, чтобы оптимизировать искру и подачу топлива для максимальной мощности. Когда эти карты оптимизированы, настройка ROM может обеспечить такое же увеличение мощности, как и полностью автономный компьютер настройки. Однако, поскольку карты в ПЗУ неизменяемы и недоступны после того, как они запрограммированы, они не позволяют оптимизировать будущие изменения или дополнения к вашей настройке.
Вот, поросенок
Комбинированные системы подключаются к заводскому блоку управления двигателем, как правило, с помощью проводного ввода или жгута перемычек, и позволяют модифицировать входные и выходные сигналы блока управления двигателем. Поскольку блоки имеют собственную внутреннюю память, в ЭБУ не требуется никаких физических или электронных модификаций. Сигналы датчиков перехватываются и модифицируются дополнительным ЭБУ для оптимизации подачи топлива и времени перед отправкой на форсунки и зажигание.
Сигналы датчиков перехватываются и модифицируются дополнительным ЭБУ для оптимизации подачи топлива и времени перед отправкой на форсунки и зажигание.
Некоторые дополнительные системы позволяют устанавливать и контролировать дополнительные датчики, которых нет на заводском двигателе. Это удобно при добавлении принудительной индукции в автомобиль без наддува или при добавлении дополнительных датчиков для точной настройки. Многие комбинированные системы предлагают одно- или многоканальные выходы модифицированных сигналов для использования в других внешних электронных контроллерах или дисплеях.
Дочерние платы, такие как Hondata S300 версии 3, обеспечивают повышенную программируемость без ущерба для управляемости.
Комбинированные системы обычно обеспечивают лучшую управляемость при минимальном объеме программирования или настройки. Это связано с тем, что заводские карты ECU все еще присутствуют и обеспечивают наилучшие «базовые карты» для настройки. Компромисс заключается в том, что диапазоны и уровни регулировки не так широки, как настройка ПЗУ или автономные ЭБУ. Кроме того, некоторые современные заводские ЭБУ являются адаптивными, что означает, что заводские карты топлива и зажигания постоянно корректируются, чтобы оставаться в пределах заводских параметров. Поскольку контрейлерные системы перехватывают и корректируют сигналы, идущие к форсункам и катушкам, на основе фиксированной карты, настройка со временем может измениться.
Кроме того, некоторые современные заводские ЭБУ являются адаптивными, что означает, что заводские карты топлива и зажигания постоянно корректируются, чтобы оставаться в пределах заводских параметров. Поскольку контрейлерные системы перехватывают и корректируют сигналы, идущие к форсункам и катушкам, на основе фиксированной карты, настройка со временем может измениться.
Тем не менее, контрейлерные компьютеры могут обеспечить достаточный контроль и разрешение для некоторых умеренно настроенных транспортных средств. Поскольку эти умеренные сборки могут претерпевать частые и постепенные изменения настроек, комбинированную систему можно легко перенастроить, чтобы преодолеть перенастроенные заводские карты.
Re-Flash Dance
Новые заводские ЭБУ на рынке начинают догонять последние компьютерные технологии. Современные производители начали использовать память с многократной записью или флэш-память. Некоторые послепродажные решения для управления двигателем воспользовались этим преимуществом и предлагают портативные или компьютерные программные и аппаратные решения, которые могут записывать в разделы флэш-памяти заводского ЭБУ через коммуникационный порт OBD-II.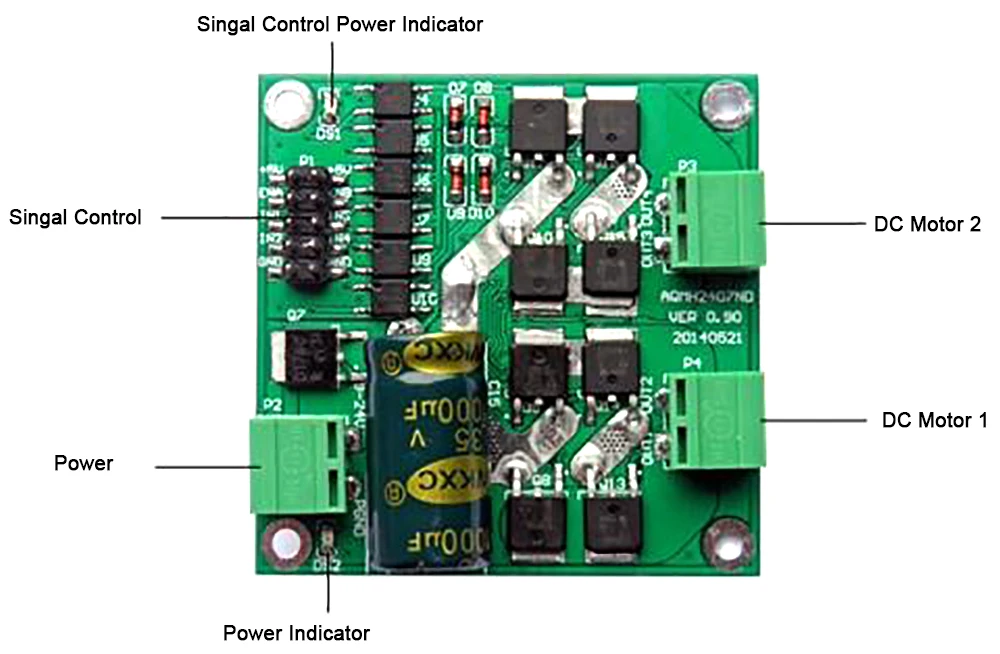
Некоторые устройства позволяют сохранять заводские топливные карты и карты времени для будущего «преобразования с понижением частоты», что позволяет энтузиастам при необходимости перепрошить заводской ЭБУ с исходными картами по умолчанию. Кроме того, поскольку некоторые системы перепрошивки позволяют использовать загруженные заводские карты топлива и времени зажигания в качестве базовых карт, вероятность проблем с управляемостью после настройки уменьшается.
На рынке имеются устройства для перепрошивки, которые также имеют возможности регистрации данных, настройки карты в реальном времени и смены карты на лету. Кроме того, некоторые устройства для перепрошивки предлагают дополнительные функции, облегчающие управление другими компьютерными системами автомобиля, что делает устройство более жизнеспособным решением для полного управления двигателем и автомобилем.
Тюнер Reflash позволяет пользователям сохранить заводские ЭБУ и жгут проводов, просто подключившись к порту OBDII для настройки своего автомобиля.
 Готовые карты позволяют энтузиастам легко прикрутить детали и прошить автомобиль соответствующей картой.
Готовые карты позволяют энтузиастам легко прикрутить детали и прошить автомобиль соответствующей картой.Stand By Me
Автономные компьютерные системы (SAC) полностью заменяют заводской ECU, обеспечивая полный контроль над двигателем. Автономные системы предлагают ряд функций для повышения гибкости, более точного управления и большей мощности. Поскольку заводской ЭБУ полностью удален из системы управления, ограничения, установленные заводским ЭБУ (ограничение числа оборотов, ограничение скорости, отключение наддува), больше не существуют или могут быть изменены пользователем в автономном программном обеспечении.
Сложные системы управления двигателем могут подключаться к заводскому жгуту с помощью жгута проводов по принципу «подключи и работай» или напрямую к двигателю с помощью специального жгута проводов.
Кроме того, в автономном режиме могут быть доступны некоторые специальные функции, которые обычно недоступны на заводском ЭБУ. К ним относятся управление наддувом, электронное управление дроссельной заслонкой, двухступенчатое управление запуском и впрыск закиси азота.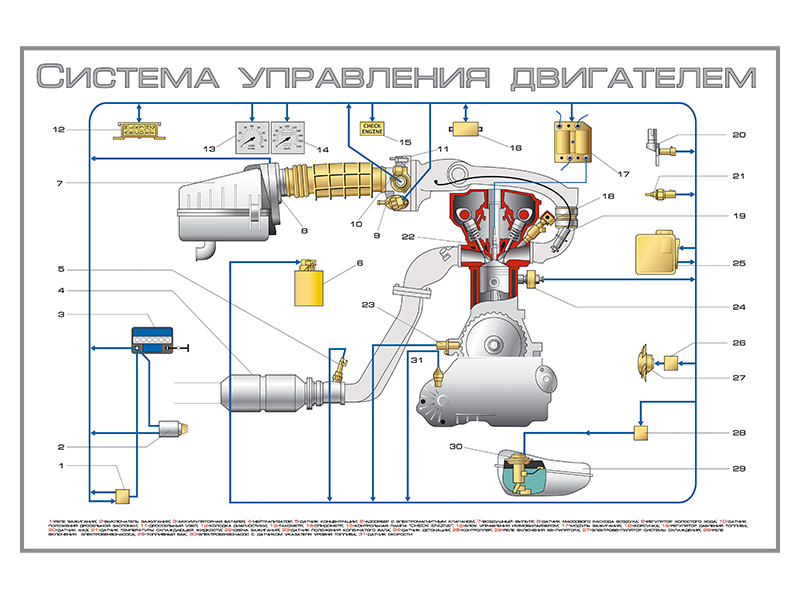 Многие автономные ЭБУ имеют возможности регистрации данных и простые интерфейсы для извлечения данных.
Многие автономные ЭБУ имеют возможности регистрации данных и простые интерфейсы для извлечения данных.
Объединение многих функций в один блок, способный координировать и организовывать все, увеличивает первоначальную стоимость входа, но также снижает потребность в покупке и установке дополнительной электроники, делая процесс настройки еще проще.
Как правило, автономные системы управления двигателем предлагают карты топлива и зажигания с более высоким разрешением для настройки. Чем больше точек доступно для настройки на каждой доступной карте, тем плавнее и точнее будет настроенная мощность. Недостатком карт с высоким разрешением является количество времени, которое требуется для правильной настройки транспортного средства. Кроме того, поскольку автономные устройства обычно предлагают контроль над большим количеством возможных комбинаций карт, им требуется больше времени для завершения начальной настройки без хорошей базовой карты, предоставленной производителем. Многие тюнеры сохраняют базовые конфигурации карт для приложений и настроек, с которыми они обычно сталкиваются, что ускоряет первоначальный процесс настройки.
Современные решения для перепрошивки и автономные системы управления двигателями имеют комплексные комплекты программного обеспечения, которые позволяют отслеживать и настраивать многочисленные каналы и параметры.
Ранее отдельные производители ограничивали доступность аппаратного и программного обеспечения для программирования авторизованными магазинами настройки. Хотя некоторые все еще следуют этому методу, растет число производителей, предлагающих программные и аппаратные решения для подключения непосредственно потребителям. Это дает опытному тюнеру возможность настраивать автономную настройку под свои собственные параметры, без необходимости настраивать свой автомобиль на авторизованном заводе производителя.
Установка автономной системы управления двигателем может быть легко упрощена благодаря наличию съемного жгута проводов. Эта опция позволяет вам использовать заводской жгут проводов для большинства функций считывания показаний датчиков и управления, в то время как дополнительные датчики и контроллеры могут быть подключены по мере необходимости. В случае отсутствия втычного жгута, автономный производитель предоставляет ряд незавершенных отрезков проводов, которые должны быть подключены к каждому из необходимых датчиков, форсунок и компонентов системы зажигания. Хотя эта установка более сложная, она дает возможность подключить только необходимые компоненты автономного ЭБУ. Дополнительным преимуществом является возможность установки ЭБУ в месте, которое облегчает настройку при необходимости.
В случае отсутствия втычного жгута, автономный производитель предоставляет ряд незавершенных отрезков проводов, которые должны быть подключены к каждому из необходимых датчиков, форсунок и компонентов системы зажигания. Хотя эта установка более сложная, она дает возможность подключить только необходимые компоненты автономного ЭБУ. Дополнительным преимуществом является возможность установки ЭБУ в месте, которое облегчает настройку при необходимости.
На уличном транспортном средстве удаление заводского ECU может сделать электронные компоненты бесполезными, особенно те, которые полагаются на данные, собранные ECU. Стеклоочистители, чувствительные к скорости, или некоторые автоматические или управляемые компьютером элементы управления коробкой передач. Это означает, что транспортные средства, используемые на дорогах общего пользования или которым могут потребоваться эти компоненты и функции для прохождения местных проверок безопасности, могут быть не лучшими кандидатами на получение автономного ЭБУ.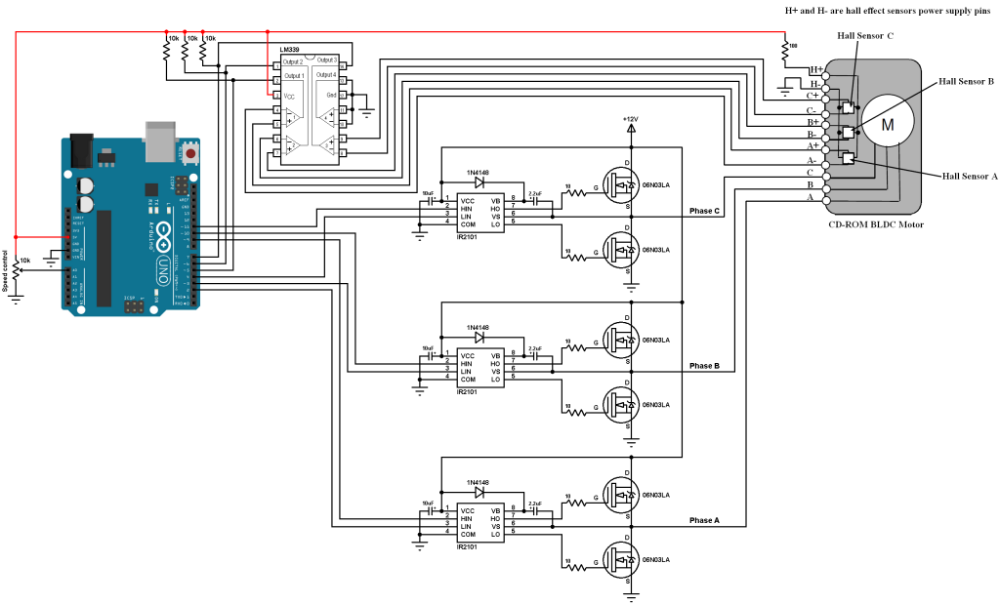
–
Стой и действуй
Существует множество вариантов управления двигателем после продажи. Они варьируются от бюджетных до сборок с неограниченным бюджетом, но потенциально каждый из них может иметь применение в ваших поисках идеальной схемы управления двигателем. Будь то автономная или базовая одноразовая настройка ПЗУ, обязательно наметьте свои цели по производству лошадиных сил, чтобы избежать покупки нескольких систем управления двигателем.
Несмотря на то, что автономные системы управления двигателем, как правило, более дорогие и сложные, чем блок перепрошивки ЭБУ, они предлагают непревзойденные возможности настройки и дополнительные каналы, которых просто нет в заводском ЭБУ.
УПРАВЛЕНИЕ ДВИГАТЕЛЕМ
Мониторы двигателя, датчики двигателя и компьютеры расхода топлива от Electronics International, JP Instruments, Insight, Shadin, Sandia, Trutrak, Dynon, Garmin и других.
У Sarasota Avionics есть опыт, чтобы порекомендовать правильный монитор двигателя вашего самолета, и с нашей покупательной способностью мы гарантируем самые низкие цены, которые вы найдете где угодно!
RelevanceName: от A до ZName: от Z до APЦена: от низкой до высокойЦена: от высокой до низкойСамые новые поступленияПоказать заказ
GI 275 EIS с GEA 24
Система индикации двигателя для самолетов класса I/II Деталь Garmin №: 010-02325-10
$3,795. 00
00
При настройке в качестве основного для отображения информации о двигателе GI 275 может взаимодействовать с однодвигательными и многодвигательными самолетами без наддува или с турбонаддувом с выбранными силовыми установками, включая 4/6-цилиндровые двигатели Lycoming и Continental.
Посмотреть ещё
Пакет обновления CGR-30P
Цветной монитор двигателя (STC/TSO в качестве основной замены) Electronics International Часть №: CGR30P-UPGRADE
От 2998,00 долларов США
Время обновить анализаторы двигателя и расходомеры топлива! Electronics International предлагает пакеты со скидкой, которые делают ее
легко модернизировать существующие анализаторы двигателя и приборы расхода топлива до лучших на рынке мониторов двигателя.
Посмотреть ещё
CGR-30P Базовый
Цветной монитор двигателя (STC/TSO в качестве основной замены) Международная электроника, часть №: CGR-30P-B
От 3 398,00 долларов США
4- или 6-цилиндровый базовый пакет с числом оборотов в минуту, гистограммой EGT/CHT, расходом топлива, OAT и напряжением. STC и TSO в качестве основной замены.
Посмотреть ещё
CGR-30P Премиум
Цветной монитор двигателя (STC/TSO в качестве основной замены) Международная электроника, часть №: CGR-30P-P
От 4098,00 долларов США
4- или 6-цилиндровый пакет Premium с числом оборотов в минуту, гистограммой EGT/CHT, OAT и пятью основными функциями на ваш выбор.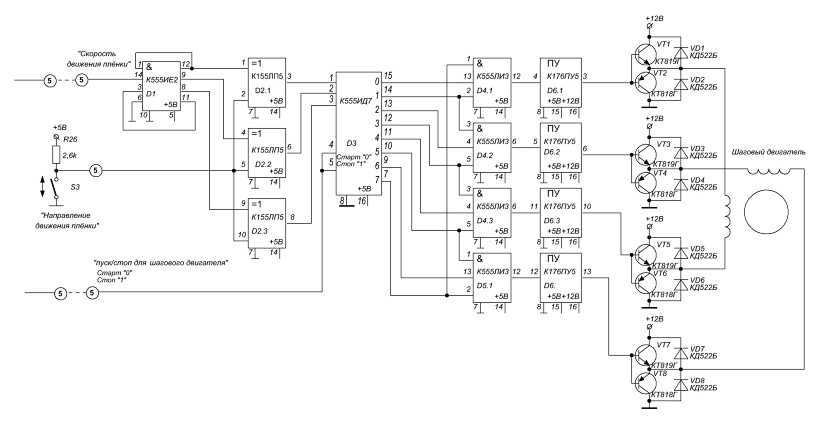 STC’d & TSO’d как первичный
Замена.
STC’d & TSO’d как первичный
Замена.
Посмотреть ещё
ЦГР-30С
Кластерный датчик Электроника Международная часть №: CGR30C
От 2 298,00 долларов США
CGR-30C может быть установлен как автономный прибор для замены кластерного манометра или может быть установлен как дополнительный прибор к существующая установка CGR-30P для максимального управления двигателем и системами.
Посмотреть ещё
CGR-30 Премиум Комбо
Комбинированный цветной монитор Engine (TSO’d) Electronics International Часть №: CGR-30-COMBO
От 5 048,00 долларов США
Пакет «Премиум» для 4- или 6-цилиндровых двигателей, включающий прибор CGR-30P Premium и CGR-30C Cluster Gauge.
Посмотреть ещё
CGR-30P Твин
Цветной монитор двигателя для двухдвигательного самолета Международная электроника, часть №: CGR-30-T
От 7 998,00 долларов США
Доступен в 4- или 6-цилиндровом исполнении.
CGR-30P теперь сертифицирован для двух самолетов.
Посмотреть ещё
CGR-30P Двойной комбо
Цветной монитор двигателя для двухдвигательного самолета Международная часть электроники №: CGR-30-TC
От $8,998. 00
00
Доступен в 4- или 6-цилиндровом исполнении.
CGR-30P теперь
сертифицирован для двухместных самолетов.
Посмотреть ещё
ЭДМ-900 Первичный
Система управления цветом JP Instruments Часть №: EDM900
От 5 149,00 долларов США
Если вы переделываете свою панель, рассмотрите возможность использования основного JPI EDM. Имея на борту 900, вы можете удалить многие из своих старых датчиков двигателя, открыть
ценное место на вашей панели, и летайте со спокойной душой, зная, что JPI немедленно предупредит вас, если какой-либо из параметров превысит допустимое значение.
запрограммированный лимит.
Просмотреть еще
EDM-930 Первичный
Управление данными двигателя JP Instruments Деталь №: EDM930
От 6 899,00 долларов США
Если вы ищете более крупную замену первичного датчика двигателя, TSO’d EDM 930 (глубина 3,3″ — ширина 5,584″ – высота 5,11″)
монтировать в свою панель. Флагманский монитор JPI с большим, хорошо читаемым при солнечном свете ЖК-дисплеем предлагает почти неограниченные возможности и
конфигурации. 7 или 9 цилиндров, без проблем для всех продуктов JPI, а также их быстродействующие заземленные датчики EGT и датчики CHT с медными наконечниками
на сегодняшний день являются самым качественным аппаратным обеспечением.
Посмотреть ещё
ЭДМ-730
Цветной монитор двигателя JP Instruments Деталь №: EDM730
От 1729,00 долларов США
Благодаря EDM 730 теперь можно своевременно и удобно получать значительно больше диагностической информации.
Посмотреть ещё
Обновление EDM730
Модернизация цветного монитора EDM700 Номер детали JP Instruments: EDM730-обновление
1550,00 долларов США
Обновите свой JP Instruments EDM700 до EDM730 по сниженной цене. Использует существующий жгут проводов системы, датчики и преобразователи.
Использует существующий жгут проводов системы, датчики и преобразователи.
Посмотреть ещё
ЭДМ-830
Цветной монитор двигателя JP Instruments Деталь №: EDM830
От 2879,00 долларов США
С помощью EDM 830 теперь можно получить значительно больше диагностической информации своевременно и удобно.
способ.
%HP/FF/OAT/MAP/RPM/Oil Temp и давление масла + USB
Подробнее
Обновление EDM830
Обновление монитора Color Engine с EDM800 Номер детали JP Instruments: EDM830-обновление
1550,00 долларов США
Обновите свой JP Instruments EDM800 до EDM830 по сниженной цене. Использует существующий жгут проводов системы, датчики и преобразователи.
Использует существующий жгут проводов системы, датчики и преобразователи.
Посмотреть ещё
ФП-5
Расход/давление топлива Международная электроника, часть №: FP5
$549.00
FP-5 и FP-5L предлагают современные функции управления топливом и безопасностью, которых нет в других приборах для измерения расхода топлива, представленных на рынке. Управление топливом является критически важной функцией в самолете, и FP-5 и FP-5L справляются с этим лучше, чем любой другой датчик на рынке.
Посмотреть ещё
ФП-5Л
Управление топливом Международная электроника, часть №: FP-5L
От $695. 00
00
FP-5 и FP-5L имеют все те же функции, за исключением того, что FP-5L может взаимодействовать с King, Trimble, II Morrow, ARNAV или другими подобными Инструменты Loran/GPS. Это позволяет FP-5L рассчитывать и отображать топливо до пункта назначения и запас топлива (остаток топлива после того, как вы достигнете цели). ваш пункт назначения). Также FP-5L предупредит вас, если на борту недостаточно топлива для достижения пункта назначения.
Посмотреть ещё
ФС-450
Комплектный расходомер топлива для одного двигателя с интерфейсом GPS JP Instruments Деталь №: 450000
$529,00
Доступен с датчиком гравитационного или напорного расхода.
JPI Fuel Scan-450 имеет двойной дисплей, всегда отображающий расход топлива на верхнем дисплее и другие измерения на нижнем. Скорость сканирования для отображения этих измерений может регулироваться по выбору пользователя. Каждый Fuel Scan-450 будет взаимодействовать с вашим панельным креплением или ручным GPS. Дополнительных опций для покупки нет.
Посмотреть ещё
FS-450 Твин
Комплектный расходомер топлива для двух двигателей JP Instruments Деталь №: 450000-M
1029,00 долларов США
Посмотреть ещё
УБГ-16
Анализатор двигателя с записью данных Международная электроника, часть №: UBG-16
От 1498,00 долларов США
- Дополнительная замена
- 2 1/4″ Утопленный монтаж
- EGT/CHT + больше (до 16 функций).
 Программируемые сигналы тревоги и запись данных
Программируемые сигналы тревоги и запись данных
 Программируемые сигналы тревоги и запись данных
Программируемые сигналы тревоги и запись данныхПосмотреть ещё
Сертифицированный МВП-50П
Анализатор двигателя/системный монитор для поршневых самолетов Международная часть электроники №: MVP50P-C
От 6 250,00 долларов США
Компания Electronics International изменила представление о том, каким должен быть анализатор двигателя, с помощью полноцветного, полностью настраиваемого со стеклянными панелями. МВП-50П.
Посмотреть ещё
Сертифицированный MVP-50P TWIN
Анализатор двигателя/системный монитор для самолета с двумя поршневыми двигателями Электроника Международная часть №: MVP50P-TWIN
От 12 689,00 долларов США
Компания Electronics International изменила представление о том, каким должен быть анализатор двигателя, с помощью полноцветного, полностью настраиваемого со стеклянными панелями. МВП-50П.
МВП-50П.
Посмотреть ещё
Сертификат MVP-50T
Анализатор двигателя/системный монитор для турбовинтовых и реактивных самолетов Электроника Международная часть №: MVP50T
9 189,00 долларов США
STC и TSO в качестве основной замены.
Модель MVP-50T изменила представление о том, каким должен быть анализатор турбовинтовых двигателей.
Посмотреть ещё
Сертификат MVP50T TWIN
Анализатор двигателя/системный монитор для двухтурбинных/реактивных самолетов Международная электроника, часть №: MVP50T-TWIN-C
STC и TSO в качестве основной замены.
MVP-50T изменил представление о том, каким должен быть анализатор турбовинтовых двигателей.
Посмотреть ещё
Датчики для управления двигателем
Датчики массового расхода воздуха предоставляют информацию о температуре, влажности и объеме всасываемого воздуха.
Датчики помогают снизить расход топлива и вредные выбросы. Они играют определенную роль в повышении эффективности двигателя и безопасности автомобиля, обеспечивая больший комфорт и удовольствие от вождения.
Для выполнения задачи сбора и передачи данных датчики должны быть устойчивы к температуре, влаге, грязи и химическим веществам. Кроме того, они должны безупречно функционировать в электромагнитных полях и в присутствии других датчиков, а также обеспечивать длительный срок службы.
Датчики массового расхода воздуха
Растущее внимание к сокращению выбросов CO2 означает, что датчики массового расхода воздуха приобретают все большее значение для обеспечения оптимального соотношения воздух-топливо.
Датчики массового расхода воздуха расположены непосредственно после воздушного фильтра во впускном коллекторе и предоставляют информацию о температуре, влажности и объеме всасываемого воздуха. Несмотря на очень компактную конструкцию, они оснащены точной технологией сбора информации, которая вместе с другими данными двигателя обеспечивает оптимальное управление двигателем.
Эти данные включают:
- Температура всасываемого воздуха
- Влажность всасываемого воздуха
- Объем всасываемого воздуха
В бензиновых двигателях измерение массового расхода воздуха используется в сочетании с показаниями других датчиков для регулирования подачи топлива в двигатель.
В дизельных двигателях датчики массового расхода воздуха используются для регулирования скорости рециркуляции отработавших газов и расчета максимального количества впрыскиваемого топлива.
Наши датчики массового расхода воздуха исключительно надежны и способны противостоять факторам окружающей среды.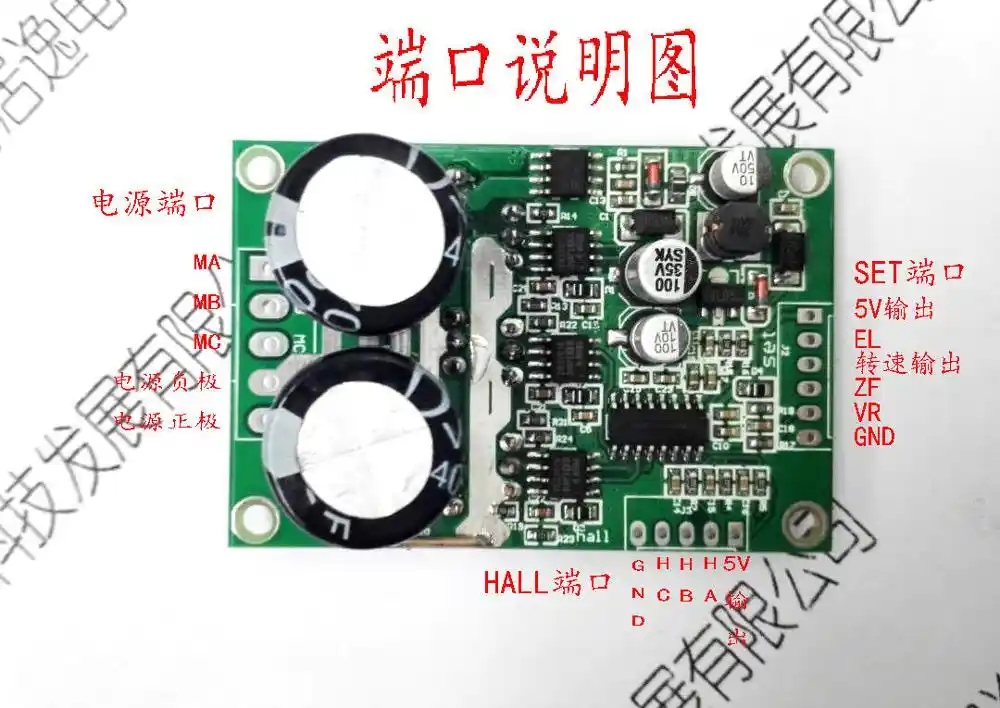 Их способность к измерению динамики вносит важный вклад в снижение выбросов транспортных средств.
Их способность к измерению динамики вносит важный вклад в снижение выбросов транспортных средств.
Датчики скорости вращения колес
Сигнал скорости вращения колес имеет решающее значение для таких электронных систем, как ABS или ASC.
Датчики распределительного вала
Датчик распределительного вала расположен в головке блока цилиндров и считывает показания звездочки распределительного вала, чтобы определить положение распределительного вала.
Эта информация требуется для таких функций, как инициирование впрыска в двигателях с последовательным впрыском, сигнал срабатывания магнитного клапана в системах впрыска с насос-клапаном и для контроля детонации в зависимости от цилиндра.
Датчики коленчатого вала
Датчик коленчатого вала предоставляет информацию о текущем положении коленчатого вала, которую система управления двигателем может затем использовать для расчета оборотов. Эти значения позволяют определить наиболее экономичный впрыск топлива и угол опережения зажигания для автомобиля.
Датчики детонации
Современные двигатели с высокой степенью сжатия имеют явный недостаток: их конструкция приводит к усилению детонации, что может привести к повреждению двигателя.
Датчики детонации достоверно измеряют характерную для детонации вибрацию блока цилиндров двигателя. Это позволяет установить угол зажигания и другие параметры таким образом, чтобы двигатель продолжал правильно работать вблизи порога детонации. Это не только защищает двигатель, но и снижает расход топлива.
Для обеспечения максимальной точности наши датчики детонации используют революционную технологию полосы пропускания.
Датчики давления
Датчики MAP и T-MAP измеряют давление воздуха во впускном коллекторе за дроссельной заслонкой для определения поступления воздуха. Эта информация чрезвычайно важна для расчета количества впрыскиваемого топлива, чтобы обеспечить правильную топливно-воздушную смесь. По этой причине возможность динамических измерений этих компонентов управления двигателем имеет решающее значение для снижения выбросов транспортных средств.
- Датчик давления MAP для двигателей с турбонаддувом для измерения давления воздуха за турбокомпрессором (диапазон измерения 500–3000 гПа)
- Датчик давления T-MAP со встроенным датчиком температуры
Кислородные датчики
Инвестиции в качество окупаются
Существующий ассортимент датчиков для управления двигателем оптимально дополняется датчиками кислорода, с помощью которых достигается максимальная мощность двигателя при минимально возможном расходе топлива.
Измерения лямбда-зонда необходимы для обеспечения того, чтобы каталитический нейтрализатор преобразовывал почти все выхлопные газы, образующиеся при сгорании топлива. Лямбда-зонды определяют количество остаточного кислорода в выхлопе и передают это значение в систему управления двигателем, которая, в свою очередь, точно устанавливает состав смеси, используя переданные значения.
Датчики кислорода подвергаются значительным нагрузкам,
- Высокие температуры
- Вибрации
- Замена газов
, что означает, что нельзя избежать определенного уровня износа и старения.
Проблемы, которые могут возникнуть с кислородными датчиками:
- Неисправный нагреватель датчика
- Кабели и разъемы плавятся из-за контакта с выхлопной системой
- Перегиб датчика
- Отложения сажи из-за «богатой» смеси или большого расхода масла
- Механические дефекты кабеля или кабельных уплотнений
Единственный способ обеспечить практически полное преобразование топливно-воздушной смеси в экологически безопасные выхлопные газы – это точная регулировка топливно-воздушной смеси. Наши кислородные датчики обеспечивают оптимальную мощность двигателя при соблюдении установленных значений выбросов.
Датчики эксцентрикового вала
Датчики VDO точно контролируют отрегулированный угол эксцентрикового вала и сообщают это значение системе управления двигателем.
Воспользуйтесь услугой онлайн-каталога, чтобы получить более подробную информацию об этом продукте, который может быть установлен в вашем автомобиле (легковом автомобиле).
См. также наши двигатели с регулируемой высотой подъема
Датчики температуры выхлопных газов
Управление двигателем для защиты окружающей среды
Во времена защиты окружающей среды, очистки выхлопных газов и снижения расхода топлива датчик температуры выхлопных газов дополняет наш ассортимент продукции.
Применение
Эти датчики устанавливаются в системах нейтрализации отработавших газов
Особенности:
В области управления двигателем датчик выполняет множество задач.
- Проверка работоспособности и защиты компонентов
- Контроль температуры турбонагнетателей, каталитических нейтрализаторов, дизельных сажевых фильтров и систем снижения содержания оксидов азота
- Контроль оптимальной рабочей точки
- Защита от перегрузки по температуре
- Снижение вредных выбросов
- Снижение расхода топлива
Качество, которое окупается
Все датчики соответствуют оригинальным датчикам и, следовательно, соответствуют спецификациям и требованиям производителей транспортных средств.
Программа
- Запасная часть 1:1 (подключи и работай)
- Покрытие основных европейских производителей автомобилей
Покрытие автомобиля:
А3, ТТ, А4, А5, А6, А8, В5, В7; Класс А, Класс С, Класс Е, Класс GLK, CLS, Спринтер; Astra H, Astra J, Insignia, Corsa D, Signum, Vectra C, Zafira B, Mokka, Meriva B; 9-3, 9-5; Альтеа, Леон, Толедо, Эксео, Ибица; Октавия, Суперб, Йети, Фабия, Румстер; Beetle, Eos, Golf V, Golf VI, Jetta III, Jetta IV, Scirocco, Phaeton, Touareg, Passat, Polo, Caddy III, Touran, Tiguan |
Базовое управление двигателем •
Перейти к содержимомуБазовое управление двигателем
Современные системы управления двигателем прекрасно справляются с обеспечением чистой и эффективной работы двигателей в самых разных условиях, они по большей части надежны и практически не требуют обслуживания.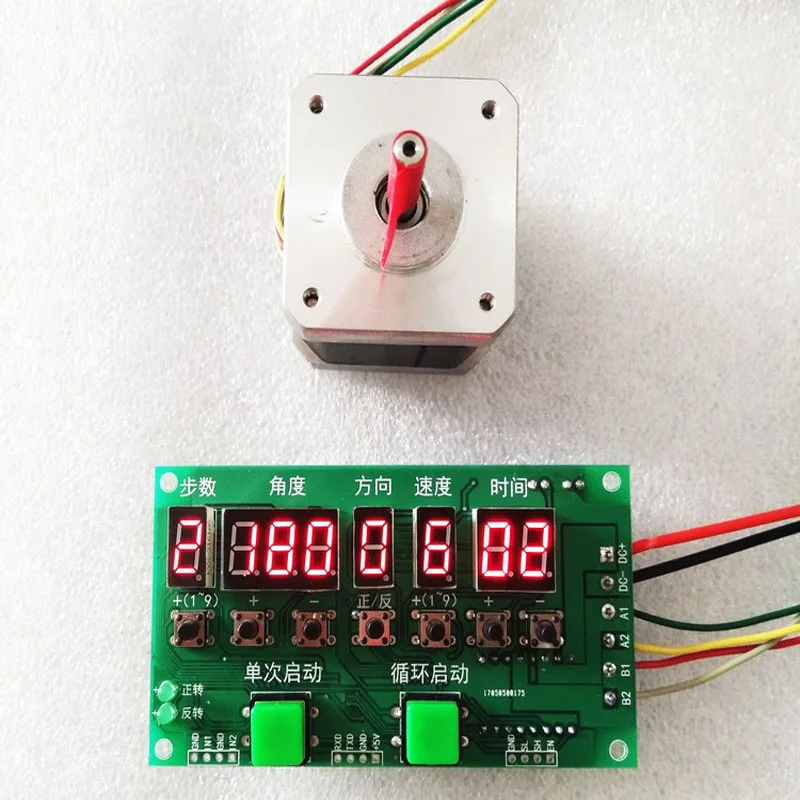 Однако со стороны они кажутся безумно сложными системами, которые не поддаются никаким попыткам понимания. Среди всей этой кажущейся чепухи легко упустить из виду две основные функции, выполняемые EMS.
Однако со стороны они кажутся безумно сложными системами, которые не поддаются никаким попыткам понимания. Среди всей этой кажущейся чепухи легко упустить из виду две основные функции, выполняемые EMS.
Дать искру в нужный момент.
Для дозирования топлива в двигатель в нужном количестве.
Базовая система управления двигателем, или EMS, представляет собой автономный компьютер, который управляет работой двигателя, отслеживая частоту вращения двигателя, нагрузку и температуру и обеспечивая искру зажигания в нужное время для преобладающих условий и дозируя топливо в двигатель в точное необходимое количество.
В системе управления двигателем работают две отдельные подсистемы: топливная система или система впрыска и система зажигания. Можно запустить систему управления двигателем, которая обеспечивает только одну из этих подсистем, например только систему зажигания. Гораздо более распространено изолированное использование сопоставленного зажигания в системе управления двигателем, чем использование только впрыска.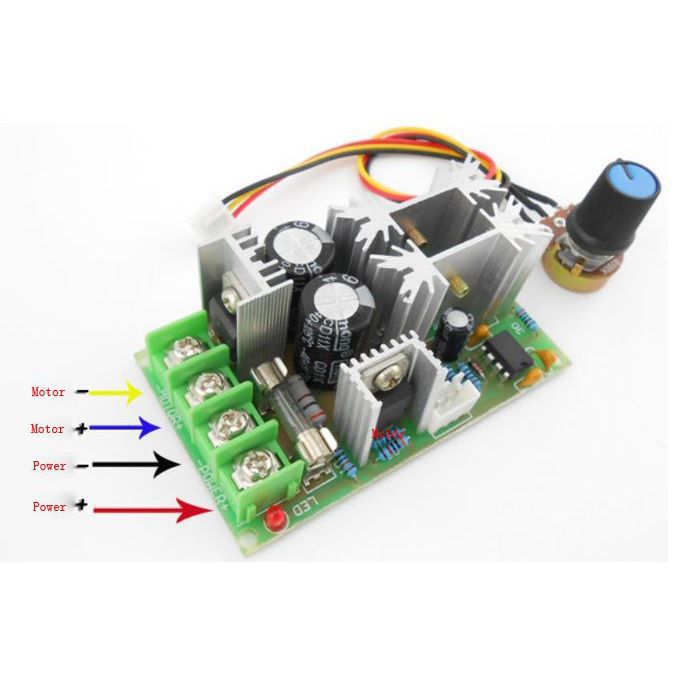
Большинство из нас слышали термин «картированное зажигание» и запрограммированный или картированный впрыск, но могут не понимать, что это такое на самом деле. Пока двигатель работает, его требования к топливу и времени зажигания будут варьироваться в зависимости от определенных условий работы двигателя, основными из которых являются частота вращения двигателя и нагрузка на двигатель. «Карта» — это не более чем справочная таблица по частоте вращения двигателя и нагрузке, в которой указаны соответствующие настройки топлива или времени для каждой возможной скорости и нагрузки. Обычно в системе управления двигателем имеется карта для времени инжектора (топливная карта) и отдельная карта для настроек момента зажигания (карта зажигания).
Каждая карта содержит записи для предварительно определенного диапазона скоростей двигателя (называемых точками скорости) и заданного диапазона условий нагрузки двигателя (называемых точками нагрузки), которые обычно указывают, насколько открыта дроссельная заслонка.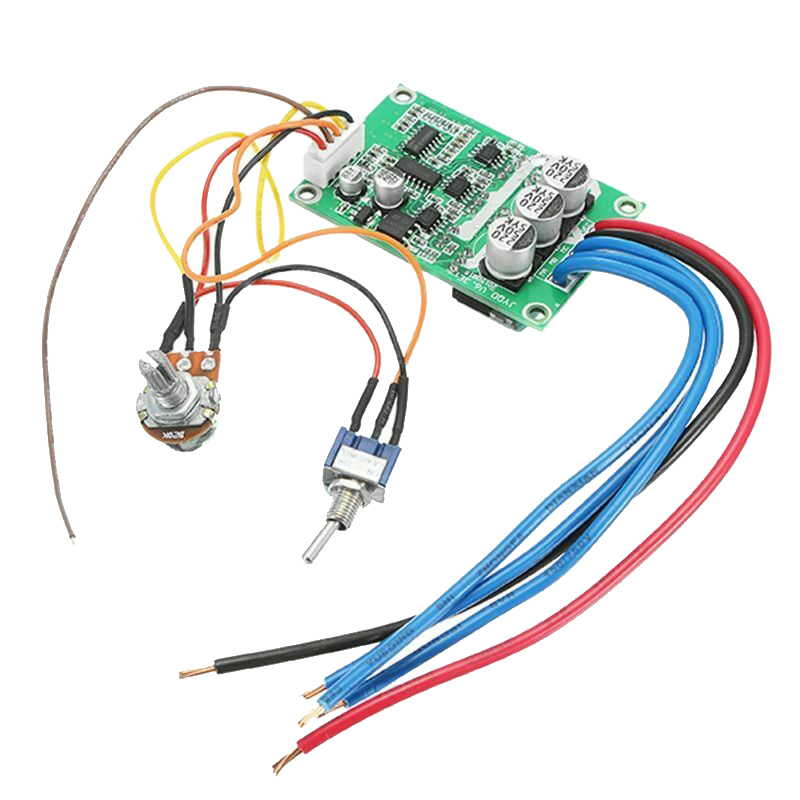 Система управления двигателем знает частоту вращения коленчатого вала двигателя (по данным датчика коленчатого вала или датчика распределения) и нагрузку на двигатель (по данным датчика положения дроссельной заслонки или расходомера воздуха) и будет использовать эти два значения для «поиска» соответствующих настроек топлива и времени. в каждой карте.
Система управления двигателем знает частоту вращения коленчатого вала двигателя (по данным датчика коленчатого вала или датчика распределения) и нагрузку на двигатель (по данным датчика положения дроссельной заслонки или расходомера воздуха) и будет использовать эти два значения для «поиска» соответствующих настроек топлива и времени. в каждой карте.
Если текущая телеметрия движка попадает между сайтами на карте, значение интерполируется между двумя ближайшими сайтами. Обычно будут участки скорости каждые 500 или около того оборотов в минуту и от 8 до 16 участков нагрузки между закрытым и открытым дросселем. В приведенном ниже примере участки скорости расположены через каждые 1000 об/мин, а 8 участков нагрузки пронумерованы от 0 до 7.1032 3000
In this example the engine load increases as номера мест загрузки в левой колонке увеличиваются.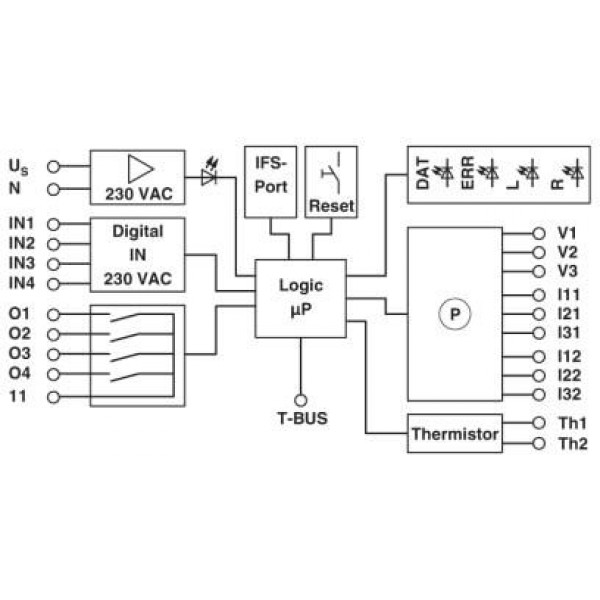 Если бы двигатель работал со скоростью 3000 об/мин, загрузите сайт 3, тогда искомое значение было бы 26, т.е. 26 градусов опережения. Если бы двигатель работал со скоростью 3500 об/мин, загрузите место 3, тогда система управления двигателем интерполирует значение для 3000 об/мин (26) и значение для 4000 об/мин (30) и рассчитает значение 28 градусов.
Если бы двигатель работал со скоростью 3000 об/мин, загрузите сайт 3, тогда искомое значение было бы 26, т.е. 26 градусов опережения. Если бы двигатель работал со скоростью 3500 об/мин, загрузите место 3, тогда система управления двигателем интерполирует значение для 3000 об/мин (26) и значение для 4000 об/мин (30) и рассчитает значение 28 градусов.
Обратите внимание, как опережение зажигания падает с увеличением нагрузки, это связано с тем, что при увеличении нагрузки цилиндры наполняются намного лучше, и, следовательно, смесь сгорает быстрее, что требует меньшего опережения зажигания.
Программируемый ЭБУ и непрограммируемый ЭБУ. Большинство систем управления двигателем, установленных на серийных автомобилях, не программируются, то есть карты в системе управления двигателем, которые определяют параметры подачи топлива и зажигания, являются фиксированными и не могут быть изменены владельцем. Это имеет смысл с точки зрения производителя, так как двигатель работает в пределах допустимых параметров, что позволяет удерживать выбросы и экономичность двигателя в известных пределах.
Существует растущий рынок «чип-тюнинга», когда чип, содержащий карты, заменяется другим, в котором изменены настройки карты, обеспечивающие лучшую производительность двигателя. EMS управляет наддувом. Замена чипа на этих двигателях может привести к значительному увеличению мощности двигателя. Некоторые производители идут на многое, чтобы не дать тюнерам расшифровать карты в своей системе управления двигателем с разной степенью успеха. Известными EMS, которые трудно, если вообще возможно, «чипить», являются Rover MEMS и система Ford EECIV.
Все послепродажные системы управления двигателем являются программируемыми, поскольку они должны быть установлены на множество различных двигателей в различных состояниях настройки. Если бы значения карты не могли быть изменены, то EMS была бы бесполезна для послепродажных приложений. Некоторые производители этих систем не одобряют картографирование в домашних условиях и позволяют проводить картографирование только авторизованным дилерам.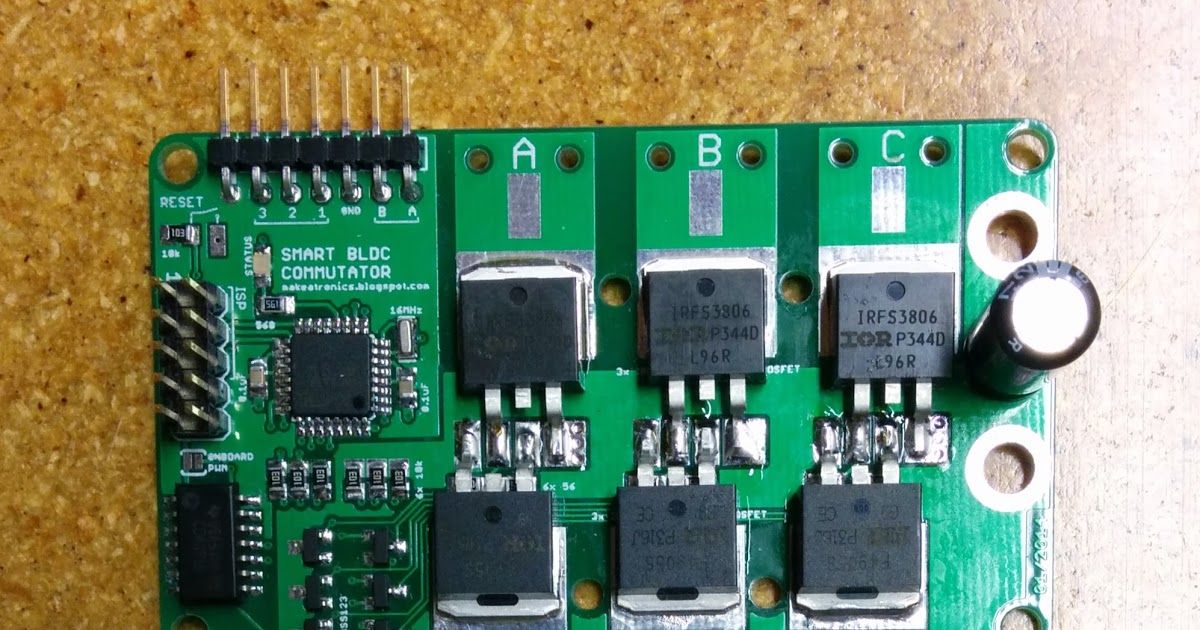
Для ясности мы рассмотрим каждую из двух подсистем в системе управления двигателем отдельно, на практике между ними существует много взаимодействий, обе системы будут использовать информацию от различных датчиков двигателя.
Система впрыска топлива.Если мы на минуту отвлечемся от фактической системы управления двигателем, основные компоненты системы впрыска очень просты. Ниже показана схема основных частей системы многоточечного впрыска, системы одноточечного впрыска очень похожи, но у них есть только одна форсунка и нет топливной рампы.
Основная система впрыска топлива
Составные части.
Топливный бак. Содержит резервуар с топливом для двигателя, обычно имеет перегородку, чтобы предотвратить разбрызгивание топлива и, как следствие, нехватку топлива.
Топливный фильтр. Поскольку инжекторный насос является поршневым насосом, любой проглоченный посторонний материал может остановить насос и убить его до смерти, этот «предварительный фильтр» предотвращает попадание мусора в насос.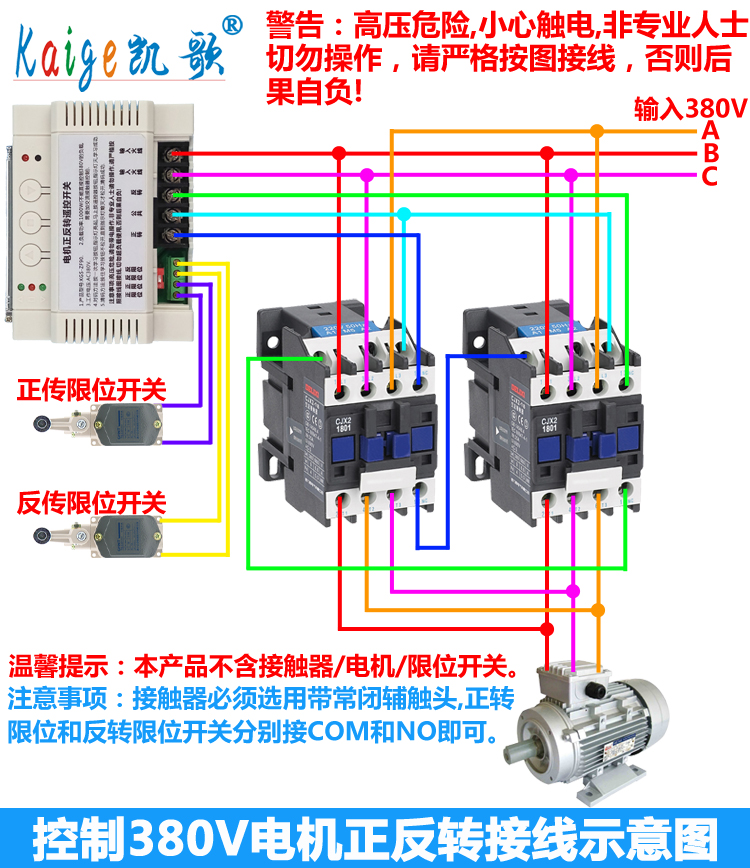
Топливный насос. Насос высокого давления, работающий при давлении около 6 бар, который подает топливо к форсункам. Регулятор давления топлива регулирует это давление в пределах от 3 до 4 бар (от 43 до 58 фунтов на квадратный дюйм). На некоторых установках насос размещается внутри топливного бака с элементарной фильтрацией, после чего топливный фильтр следует в топливопроводе.
Топливопровод. Топливопровод, который транспортирует топливо от насоса к топливной рампе.
Топливная рампа. Небольшая топливная магистраль, к которой подключаются форсунки для подачи топлива.
Топливные форсунки . Клапаны с электронным управлением, которые в открытом состоянии позволяют впрыскивать топливо в двигатель под высоким давлением. Топливные форсунки либо полностью открыты, либо полностью закрыты; нет промежуточного. В качестве примечания и простого предупреждения. Топливные форсунки могут загрязниться и засориться, и было бы неплохо помнить, что очистка топливных форсунок может решить многие проблемы с управляемостью и производительностью. Будьте осторожны с очистителями топливных форсунок.
Будьте осторожны с очистителями топливных форсунок.
Регулятор давления. Устройство, поддерживающее постоянное давление топлива и возвращающее излишки топлива в бак
Линия возврата топлива . Топливная трубка, которая сбрасывает лишнее топливо обратно в топливный бак
Большинство систем впрыска работают при довольно высоком давлении топлива по сравнению с системой, использующей карбюраторы, обычно ТНВД создает давление около 6 бар, а система работает при давлении около 3-4 бар ( 43-58 фунтов на квадратный дюйм). Это намного превышает давление, создаваемое типичным топливным насосом из системы без впрыска (3-10 фунтов на квадратный дюйм). Система впрыска основана на постоянной подаче топлива под заданным давлением, и, как правило, насос работает все время, а излишки топлива возвращаются в бак. Карта для двигателя будет получена с подачей топлива при этом давлении; колебания давления топлива повлияют на количество впрыскиваемого топлива и серьезно повлияют на работу двигателя, иногда окончательно.
Карбюраторы, как правило, справляются с короткими перерывами в подаче топлива, поскольку у них есть собственный резервуар для топлива в поплавковой камере, из которого можно подавать топливо. С другой стороны, системы впрыска не справляются с перебоями в подаче топлива, поэтому необходимо следить за тем, чтобы таких перебоев не было. Стандартной практикой является перегораживание топливного бака и использование односторонних клапанов для предотвращения выброса топлива. Там, где позволяет место, можно установить расширительный бачок, чтобы гарантировать, что выброс топлива не лишит систему впрыска топлива в неподходящий момент.
Большинство ТНВД питаются самотеком, поэтому их необходимо устанавливать ниже самой нижней точки топливного бака. Альтернативой этому является установка насоса в самом топливном баке. Большинство насосов могут работать полностью погруженными в топливо, на практике они все равно делают это, поскольку внутри насоса топливо течет вверх и вокруг якоря насоса. Работа насосов часто контролируется EMS, чтобы предотвратить подачу топлива насосом, когда двигатель не работает, например, если автомобиль попал в аварию.
Работа насосов часто контролируется EMS, чтобы предотвратить подачу топлива насосом, когда двигатель не работает, например, если автомобиль попал в аварию.
Насос подает топливо к форсункам через топливную рампу, которая представляет собой небольшую длинную трубку с соединением для каждой форсунки. Подача топлива входит в рейку с одного конца; с другой — регулятор давления топлива, который обеспечивает постоянное давление топлива. Поскольку давление топлива может влиять на количество топлива, выбрасываемого в любой данной форсунке, важно, чтобы это давление поддерживалось постоянным. Топливо, подаваемое сверх нормы, сбрасывается обратно в топливный бак через контур возврата топлива, являющийся частью регулятора давления.
Нередки случаи вмешательства в работу регуляторов давления топлива для подачи дополнительного давления топлива. Это обычная уловка, когда двигатель был настроен и в результате ему требуется больше топлива. Поскольку карта внутри OEM EMS не может быть изменена, определенное увеличение подачи топлива может быть достигнуто за счет повышения давления топлива.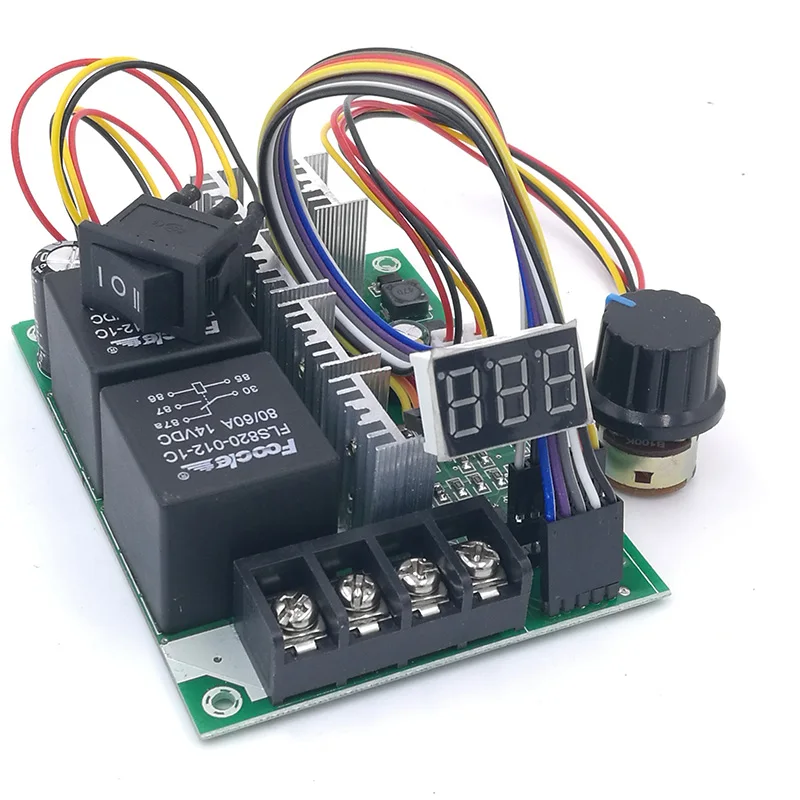 Регуляторы давления топлива с нарастающей скоростью достигают той же цели: они повышают давление топлива, когда потребность двигателя в воздухе высока, часто увеличивая давление топлива в ответ на низкий вакуум во впускном коллекторе, например. при увеличении дроссельной заслонки. Некоторые системы EMS могут самостоятельно справиться с небольшим увеличением воздушного потока, поскольку они знают, когда двигатель работает слабо из-за лямбда-обратной связи, и увеличивают подачу топлива для компенсации. Это может быть достигнуто только во время работы в установившемся режиме, поэтому время от времени будут возникать сбои в заправке топливом.
Регуляторы давления топлива с нарастающей скоростью достигают той же цели: они повышают давление топлива, когда потребность двигателя в воздухе высока, часто увеличивая давление топлива в ответ на низкий вакуум во впускном коллекторе, например. при увеличении дроссельной заслонки. Некоторые системы EMS могут самостоятельно справиться с небольшим увеличением воздушного потока, поскольку они знают, когда двигатель работает слабо из-за лямбда-обратной связи, и увеличивают подачу топлива для компенсации. Это может быть достигнуто только во время работы в установившемся режиме, поэтому время от времени будут возникать сбои в заправке топливом.
Сами топливные форсунки соединены с топливной рампой через соединитель форсунки и уплотнительное кольцо, которое должно сдерживать высокое давление в топливной системе. Форсунка — это просто электрический клапан или соленоид, топливо в форсунку подается при известном и регулируемом давлении, клапан или соленоид нормально закрыты. Топливо вводится или впрыскивается в двигатель путем запуска (открытия) форсунки в течение заранее определенного периода времени один раз за оборот двигателя или за цикл двигателя, чем дольше форсунка остается открытой, тем больше топлива вводится. Это время впрыска известно как «ширина импульса», а метод изменения топлива таким образом известен как «широтно-импульсная модуляция», поскольку именно ширина импульса изменяется в соответствии с требованиями. Поскольку топливо впрыскивается за один оборот или цикл, по мере увеличения оборотов двигателя увеличивается и количество срабатываний форсунок, что приводит к удовлетворению требований двигателя к топливу независимо от числа оборотов в минуту.
Это время впрыска известно как «ширина импульса», а метод изменения топлива таким образом известен как «широтно-импульсная модуляция», поскольку именно ширина импульса изменяется в соответствии с требованиями. Поскольку топливо впрыскивается за один оборот или цикл, по мере увеличения оборотов двигателя увеличивается и количество срабатываний форсунок, что приводит к удовлетворению требований двигателя к топливу независимо от числа оборотов в минуту.
Одноточечный впрыск.
В системах одноточечного впрыска используется одна топливная форсунка, которая впрыскивает топливо во впускной коллектор или в камеру сгорания; впрыскиваемое топливо всасывается в цилиндры воздушным потоком аналогично карбюратору. Из-за различий в длине и ориентации различных патрубков во впускном коллекторе или нагнетательной камере характеристики распределения топлива не идеальны, поэтому в результате страдают экономичность / выбросы и приемистость.
Пленум с одной точкой впрыска
Хотя положение форсунки показано в центре камеры, это просто для ясности, обычно форсунка устанавливается на корпусе дроссельной заслонки или рядом с ним, где скорость воздуха самая высокая.
Многоточечный впрыск.
Системы многоточечного впрыска гораздо более распространены и обычно имеют инжектор на цилиндр, расположенный в каждой отдельной направляющей коллектора. Эта конфигурация обеспечивает гораздо лучший контроль заправки топливом и лучшие выбросы, поскольку топливо можно дозировать более точно, и у топливной струи меньше возможностей конденсироваться или выпадать из воздушного потока, поскольку он вводится в виде четырех небольших потоков, а не одного большого. . Чем ближе к впускному клапану происходит впрыск топлива, тем лучше экономичность и переходная дроссельная заслонка. В большинстве систем используется одна форсунка на цилиндр, но на некоторых двигателях (в частности, на Rover серии «A») имеется только два впускных канала, поскольку два цилиндра имеют общий сиамский порт, в этом случае многоточечный режим будет означать две форсунки, по одной на впускной порт, это все же лучше, чем система с одним инжектором.
В многоточечных (или с несколькими форсунками) системах существует возможность выбора времени впрыска топлива для лучшего соответствия рабочему циклу двигателя. Если EMS знает относительное положение каждого цилиндра в цикле двигателя (обычно от датчика фазы распредвала), то она может запустить форсунки в оптимальное время для этого цилиндра. Это называется последовательным впрыском; иногда EMS будет знать только положение кривошипа, а не положение рабочего цикла, в этом случае он может оптимизировать для пары цилиндров, это известно как полупоследовательный или групповой впрыск.
Некоторые системы EMS игнорируют положение коленчатого вала и цикла при впрыске топлива, они запускают все форсунки одновременно один раз за оборот, это известно как групповой впрыск. При использовании пакетного впрыска не взимается плата за мощность, однако сгруппированный и последовательный впрыск дает небольшое преимущество в экономичности и кратковременном дросселировании/выбросах.
Многоточечный впрыск с пленумом
Впускные системы. Мы рассмотрели физическое оборудование самой системы впрыска, но фактически не рассмотрели систему впуска, с карбюраторами это одно и то же, с системами впрыска они разные.
Существует два основных типа впускных систем, используемых с впрыском: системы нагнетания с одним корпусом дроссельной заслонки и системы с несколькими корпусами дроссельной заслонки, которые не используют камеру нагнетания, а питают впускные каналы напрямую.
Пленумы.
Пленум представляет собой большую камеру на корпусе дроссельной заслонки со стороны двигателя, которая помогает выравнивать импульсы во впускном тракте, обеспечивая буфер поступающего воздуха. Это, в свою очередь, может помочь в экономии и выбросах, а также обеспечить более длинный эффективный впускной тракт, который может помочь крутящему моменту в среднем диапазоне, для систем с одноточечным впрыском это обязательно, для многоточечных это необязательно. Пленум является удобным местом для установки датчиков расхода воздуха и датчиков вакуума, поскольку он находится в месте слияния всех впускных каналов. Когда двигатель работает, корпус дроссельной заслонки определяет, сколько воздуха будет поступать в камеру, и поэтому двигатель, камера обычно находится в состоянии частичного вакуума.
EMS может поддерживать хороший и чистый холостой ход, пропуская больше или меньше воздуха в камеру через перепускной клапан, называемый клапаном управления холостым ходом, это вместе со специальной процедурой холостого хода в EMS позволяет идеально контролировать холостой ход (и выбросы). независимо от окружающих условий. Этот IACV работает независимо от корпуса дроссельной заслонки и обходит его работу.
Корпуса дроссельных заслонок.
Корпус дроссельной заслонки представляет собой не более чем трубку или цилиндр, который регулирует подачу воздуха во впускной коллектор двигателя или впускное отверстие. Обычно он имеет трубчатую конструкцию с заслонкой или дроссельной заслонкой, которая открывается и закрывается для регулирования воздушного потока. В некоторых корпусах дроссельных заслонок предусмотрена возможность установки топливных форсунок, в других нет; это полностью зависит от приложения. Тип корпуса дроссельной заслонки, который питает нагнетательную камеру, обычно представляет собой цельный корпус и не имеет гнезда для форсунки. Корпуса дроссельной заслонки по сути аналогичны карбюраторам, но без поплавковой камеры или жиклеров / форсунок. Их конфигурация часто аналогична конфигурациям карбюраторов в том смысле, что они обычно доступны в виде отдельных корпусов дроссельной заслонки или сдвоенных в виде двойных корпусов.
Отдельные дроссельные заслонки.
Отдельные корпуса дроссельных заслонок
Многоточечный впрыск с отдельными корпусами дроссельных заслонок
Впускные системы обычно предусматривают установку отдельных корпусов дроссельных заслонок для каждого впускного канала/рабочей части коллектора. Отдельные корпуса можно точно выровнять по впускным отверстиям, и это может дать определенные преимущества. Система, которая обеспечивает отдельные корпуса для каждого из впускных отверстий, должна максимизировать потенциал воздушного потока для каждого цилиндра и, следовательно, способствовать повышению производительности двигателя. Иногда эти корпуса предназначены для крепления болтами прямо к головке цилиндров для конкретного применения и могут быть спроектированы так, чтобы они сужались для точной посадки на впускном отверстии.
Двойные дроссельные заслонки.
Они выполняют ту же функцию, что и отдельные корпуса, но состоят из двух отдельных корпусов, соединенных вместе с фиксированным расстоянием между отдельными цилиндрами, которое может не совпадать абсолютно с впускными отверстиями. По внешнему виду они мало чем отличаются от карбюраторов Weber DCOE или IDA. Часто разница в выравнивании стволов и портов незначительна и поэтому не влияет на работу двигателя; набор двойных корпусов дроссельной заслонки обычно значительно дешевле, чем набор отдельных корпусов дроссельной заслонки. Двойные корпуса часто можно установить непосредственно вместо существующих карбюраторов, используя тот же коллектор, воздушные фильтры и т. д., что может значительно снизить затраты.
Двойной корпус дроссельной заслонки.
Многоточечный впрыск с двумя дроссельными заслонками
Система впрыска в действии.
Система EMS должна знать некоторые сведения о состоянии двигателей, чтобы правильно дозировать заправку. Во время нормальной работы они сводятся к частоте вращения двигателя и дроссельной заслонке или положению нагрузки. Как правило, эта информация передается в EMS датчиками или триггерами на двигателе, скорость двигателя определяется либо датчиком положения кривошипа (который дает положение кривошипа, из которого можно получить скорость), либо каким-либо триггером в распределителе (если установлены). Нагрузку двигателя можно определить с помощью ряда различных методов.
Частота вращения и положение двигателя обычно контролируются одним из следующих двух методов.
Датчик коленвала.
В настоящее время это наиболее распространенный метод определения скорости вращения двигателя на современном двигателе. Он состоит из диска, установленного на маховике/переднем шкиве или врезанного в него, который вращается вместе с двигателем. Диск имеет определенное количество зубцов по окружности и фиксированный индукционный датчик, который пульсирует при встрече с зубцом. Как правило, имеется образец отсутствующих зубов, поэтому EMS может точно определить положение кривошипа, а также скорость. Хотя система EMS знает положение коленчатого вала двигателя от этого датчика, она не знает положения цикла двигателя. В четырехтактном двигателе цикл двигателя включает два полных оборота двигателя с поршнем в ВМТ дважды за цикл. В один из этих моментов цилиндр готов к воспламенению, в другой раз — в конце такта выпуска, датчик кривошипа сам по себе может только указать, что поршень находится в ВМТ, он не может знать, в каком из двух циклов находится двигатель. .
Дистрибьютор.
В некоторых старых системах и во многих системах послепродажного обслуживания для определения частоты вращения двигателя используется датчик распределителя. Тип используемого распределителя обычно представляет собой эффект Холла, магнитный релюктор или оптроник и не имеет встроенного механизма продвижения. Преимущество системы на основе распределителя состоит в том, что она имеет информацию о положении цикла двигателя, а также о положении кривошипа. Это может упростить реализацию системы зажигания для последующей модификации и обеспечить обратную связь, необходимую для последовательного впрыска.
Нагрузка на двигатель обычно определяется одним из следующих методов
Датчик положения дроссельной заслонки.
Самый распространенный датчик нагрузки двигателя, особенно в послепродажных системах. TPS представляет собой небольшой потенциометр (или «потенциометр»), который подключен непосредственно к валу дроссельной заслонки и вращается вместе с ним. Он возвращает значение в EMS в зависимости от положения дроссельной заслонки. Датчики TPS обычно используются на двигателях с высокими характеристиками, где датчики воздушного потока могут быть сбиты с толку из-за импульсов во впускном тракте, поскольку они не измеряют воздушный поток, а просто показывают положение дроссельной заслонки. Предполагается, что воздушный поток является постоянным для любой заданной скорости двигателя и положения дроссельной заслонки. Если двигатель дополнительно модифицируется, характеристики воздушного потока могут измениться, и может потребоваться переназначение двигателя. Системы EMS, которые используют прямое измерение расхода воздуха, часто могут более эффективно справляться с изменениями и могут изменять подачу топлива в соответствии с потребностями без сеанса повторного картирования.
Заслонка дозатора воздуха.
Другим способом определения нагрузки на двигатель является измерение потока воздуха, поступающего в двигатель. Это можно сделать с помощью заслонки, отклоняемой поступающим воздухом, которая широко известна как заслонка дозатора воздуха. Они распространены в старых системах впрыска, но их можно спутать с обратными импульсами во впускном тракте, когда используются более экстремальные кулачки, и они могут ограничивать поток впускного воздуха.
Датчик давления воздуха в коллекторе.
Они измеряют вакуум или давление воздуха во впускном коллекторе, что, в свою очередь, дает представление о нагрузке, чаще используется в двигателях с турбонаддувом для определения уровня наддува.
Горячая проволока.
В этом подходе используется нагретая платиновая проволока и измеряется ток, необходимый для поддержания ее при определенной температуре. Когда воздух проходит по проводу, он охлаждает его, и чем больше воздуха проходит, тем больше охлаждающий эффект и, следовательно, больше ток. Систему горячей проволоки также можно сбить с толку обратными импульсами при использовании более экстремальных кулачков.
Работа системы управления двигателем.
Способ, которым EMS управляет впрыском, довольно прост: датчики и триггеры на двигателе передают в EMS информацию о частоте вращения двигателя и нагрузке. EMS использует их для извлечения соответствующего времени форсунки из карты впрыска, а затем запускает форсунку(и) на этот период времени. Если в системе используется групповой впрыск, то все форсунки запускаются одновременно один раз за оборот двигателя. При групповом впрыске форсунки сгруппированы в пары, которые срабатывают в оптимальную точку цикла двигателя, которая лучше всего подходит для этих двух цилиндров, опять же один раз за оборот. Если датчики двигателя могут определять положение цикла двигателя (обычно по датчику фазы распредвала), можно запускать форсунки в оптимальное время для каждого отдельного цилиндра; это называется последовательным впрыском. Вместо того, чтобы срабатывать один раз за оборот, каждая форсунка срабатывает на удвоенную ширину импульса в оптимальное время цикла двигателя; НАПРИМЕР. Непосредственно перед открытием впускного клапана. Есть небольшие преимущества в экономичности и выбросах, которые можно получить от использования последовательного или группового впрыска, но с точки зрения мощности разница незначительна или отсутствует.
Как мы видим, информация из этих двух основных входных источников позволяет EMS управлять заправкой двигателей так, чтобы двигатель работал нормально в нормальных условиях. Однако бывают случаи, когда двигатель не работает в этих идеальных условиях, и именно в такие моменты требуется другая жизненно важная обратная связь, позволяющая EMS правильно запускать двигатель. Как правило, в этих условиях EMS вносит коррективы или «исправления» в топливную карту в соответствии с тем, что ей известно о преобладающих условиях. Основные условия окружающей среды, за которыми следит СЭМ, следующие.
Температура двигателя.
Когда двигатель запускается из холодного состояния, его температура значительно ниже нормальной рабочей температуры, это приводит к тому, что часть топлива, впрыскиваемого в двигатель, конденсируется, а не распыляется и эффективно всасывается. Температура камеры сгорания также низкая, что приводит к неполному и медленному сгоранию. Эти эффекты вызывают слабую работу двигателя и требуют подачи в двигатель дополнительного топлива для компенсации. В традиционной системе эту функцию выполняет «дроссель» на карбюраторе, в системе впрыска датчик температуры охлаждающей жидкости сообщает EMS о температуре двигателя и позволяет ему «корректировать» подачу топлива. Эта коррекция включает добавление дополнительного количества топлива в процентах в соответствии с заранее заданным профилем коррекции по температуре до нормальной рабочей температуры двигателя. Количество дополнительного топлива будет варьироваться от двигателя к двигателю и в зависимости от температуры двигателя и оборотов, поскольку влияние конденсации меньше при более высоких скоростях воздуха.
Температура воздуха.
При высоких температурах воздуха плотность всасываемого воздуха падает, тем самым уменьшая объем кислорода, доступного для сгорания. Если количество впрыскиваемого топлива остается постоянным, смесь становится слишком богатой. Чтобы компенсировать это, EMS применяет коррекцию к базовой карте в соответствии с предварительно определенным профилем коррекции. По мере повышения температуры воздуха плотность воздуха будет продолжать падать, и, следовательно, расход топлива будет уменьшаться. Информация о температуре воздуха передается в СЭМ датчиком температуры воздуха. В некоторой степени расходомеры воздуха могут компенсировать воздух с более низкой плотностью, поскольку в зависимости от их типа они могут показывать меньший объем всасываемого воздуха.
Напряжение аккумулятора.
Если напряжение аккумуляторной батареи автомобиля меняется, вероятно, время, необходимое для открытия форсунок, будет другим. Поскольку EMS измеряет общий импульс форсунки, если форсунке требуется больше времени для открытия, то время, в течение которого она остается открытой, будет намного короче, и, следовательно, количество топлива, подаваемого в двигатель, будет соответственно меньше. Некоторые EMS имеют поправку, применяемую к базовой карте времени форсунки для изменения напряжения; поправки обычно невелики, но при более коротком времени работы форсунки (холостой ход и крейсерский режим) они могут иметь большое значение для эффективной работы двигателя.
Прочность смеси.
В некоторых EMS используется лямбда-зонд, который находится в выхлопе двигателя и измеряет «силу» смеси во время работы двигателя. В условиях стационарного режима работы EMS может определить с помощью этого датчика, является ли смесь богатой или обедненной, и может вносить коррективы в режиме реального времени, чтобы вернуть смесь к химически правильной. Обычно это происходит только в устойчивом состоянии, т.е. на холостом ходу или в крейсерском режиме и известен как «работа с замкнутым контуром». С течением времени EMS может «узнать», является ли смесь богатой или обедненной, и вносить долгосрочные корректировки.
Датчик детонации.
Датчик детонации — это акустический датчик, который отслеживает преждевременное зажигание, более известное как «стук» или «звон». Скорее всего, это устраняется регулировкой времени, но бывают обстоятельства, когда смесь также нуждается в подгонке. Когда это обнаружено, EMS может при необходимости отрегулировать подачу топлива, чтобы помочь устранить проблему.
Существуют некоторые дополнительные поправки, которые EMS может применять интуитивно, анализируя изменения состояния или другие производные условия. Наиболее распространенными являются.
Ускорение заправки.
При резком открытии дроссельной заслонки впуск обычно ослабевает, поскольку воздух легче топлива и всасывается быстрее. Ослабление переходных процессов открытия дроссельной заслонки также вызвано тем, что топливо уже впрыснуто и впускной клапан открыт до того, как могут произойти изменения во впускном коллекторе из-за дроссельной заслонки. привести к тому, что двигатель спотыкается или заикается при начальном ускорении. Чтобы противодействовать этой тенденции, EMS может отслеживать внезапные изменения положения дроссельной заслонки или нагрузки и, когда это происходит, добавлять дополнительный процент топлива. Дополнительное топливо добавляется только на короткий период, а затем распадается в течение еще одного короткого периода; обычно это количество оборотов двигателя, а не период времени. Это известно как «зажим акселератора».
Топливо для замедления.
При резком закрытии дроссельной заслонки и перегрузке двигателя уровень углеводородов в выхлопных газах может резко возрасти. Также возможно воспламенение несгоревшего топлива в выхлопной системе с характерным хлопком. на обгоне. Чтобы преодолеть это, некоторые EMS либо уменьшают подачу топлива в двигатель при превышении скорости, либо в некоторых случаях отключают его полностью.
Пусковое топливо.
При фактическом запуске двигателя частота вращения коленчатого вала довольно низкая (150-200 об/мин или около того), это означает, что скорость воздуха во впускных каналах минимальна и может быть недостаточной для распыления и всасывания всего топлива из форсунок. . Обычно необходимо добавить немного дополнительного топлива во время запуска, чтобы преодолеть этот недостаток. Количество дополнительного топлива, которое нужно добавить, может быть встроено в базовую карту на нулевой скорости, но более обычно в базовую карту вносят поправку, которая представляет собой процент дополнительного топлива, добавляемого при прокручивании коленчатого вала. Эта дополнительная заправка также может варьироваться в зависимости от температуры двигателя, поэтому поправка обычно указывается в таблице для каждого диапазона температур двигателя. Эта коррекция обычно довольно быстро затухает после запуска двигателя, поскольку она требуется только при низких оборотах коленчатого вала. Требуемый процент дополнительного топлива будет варьироваться от двигателя к двигателю.
Дополнительная информация.
Существует некоторая дополнительная информация о системах впрыска, которая не вписывается ни в одну конкретную категорию, но, тем не менее, является полезной информацией. Это подробно описано ниже.
Положение форсунки.
Положение форсунки во впускном тракте оказывает заметное влияние на работу двигателя, может влиять на экономичность, переходный режим дроссельной заслонки и выходную мощность. Общепризнано, что расположение форсунки близко к впускному отверстию обеспечивает хорошую экономичность, переходный режим дроссельной заслонки и холостой ход вместе с хорошими выбросами, а расположение форсунки дальше во впускном тракте повышает мощность за счет этих критериев. В конечном счете, для получения наилучшей выходной мощности инжектор должен располагаться как можно дальше назад, т.е. в трубе или воздушном рожке. Расположение форсунок здесь создает большую проблему при малом открытии дроссельной заслонки и низких оборотах, поскольку топливо попадает в бабочку; это также может привести к тому, что топливо будет выбрасываться из трубы ударными волнами во впускном отверстии.
Системы с двойным инжектором.
Системы с двумя инжекторами пытаются использовать преимущества инжектора, расположенного близко к порту, а также получить прирост мощности, который достигается за счет инжектора в трубе. Это делается путем установки двух форсунок, одна рядом с впускным отверстием, а другая в трубе. EMS управляет этими двумя форсунками, используя ближнюю форсунку для частичной дроссельной заслонки, низких оборотов и переходных процессов и переключаясь на вторую форсунку, установленную на трубе, когда двигатель находится в режиме WOT (широко открытая дроссельная заслонка). Некоторые системы переключаются с одной форсунки на другую сразу же после достижения определенного набора условий, другие системы переключаются между форсунками 50/50 или сокращают использование одной форсунки, увеличивая при этом другие. Эта система, если она реализована должным образом, дает лучшее из обоих миров.
Системы с двойным инжектором.
Системы с двумя форсунками обычно используются, когда требуемый размер форсунки очень велик и может повлиять на возможности дозирования и распыления при низких оборотах и холостом ходу, как правило, на двигателе с турбонаддувом, где требования к топливу сильно различаются от переходного режима до полностью открытой дроссельной заслонки. . Топливо можно дозировать через одну форсунку, когда потребности низкие, и через обе, когда потребности растут экспоненциально, или можно дозировать через обе постоянно. Часто второй комплект форсунок устанавливается тюнерами послепродажного обслуживания, модификации которых могут потребовать заправки топливом, превышающим мощность текущих форсунок, это, скорее всего, произойдет в установках с турбонаддувом или наддувом.
Рабочий цикл форсунки.
Для впрыска топлива в двигатель форсунка открывается на период времени, известный как ширина импульса, это время всегда одинаково для заданного количества топлива, независимо от частоты вращения двигателя. По мере увеличения оборотов двигателя время, доступное на один оборот для запуска форсунки, уменьшается, при 6000 об/мин доступное время составляет ровно половину времени, доступного при 3000 об/мин. По мере того, как эта возможность для впрыска становится все меньше, форсунки должны срабатывать гораздо чаще; это может привести к тому, что форсунка будет открыта почти все время. Когда используемая система впрыска является последовательной, требование состоит в том, чтобы иметь возможность подавать топливо в то время, когда впускной клапан закрыт; это еще больше снижает возможность срабатывания форсунок. Процент времени, в течение которого форсунка открыта, называется «рабочим циклом». и это представляет собой отношение между временем закрытия инжектора и временем его открытия. Если рабочий цикл превышает 90% в любом месте диапазона оборотов (т. е. форсунка открыта более 90% времени), то производительность форсунки достигается, и двигателю могут потребоваться форсунки большего размера. Они будут сбрасывать больше топлива за определенный период времени.
Размер форсунки.
Чтобы определить размер форсунок для данного двигателя, важно знать скорость их нагнетания, исходя из этого и приближенных значений потенциальных оборотов двигателя, потенциальной пиковой мощности и крутящего момента, можно сделать оценку и выбрать форсунку соответствующего размера. Лучше ошибиться в большую сторону на тот случай, если вы достигнете мощности инжектора при составлении карты и вам придется начинать с нуля. Форсунки большего размера имеют несколько недостатков, заключающихся в большей степени детализации регулировки и худшем распылении топлива с большим отверстием.
Умная штука.
Помимо нормальной работы двигателя и дозирования топлива в соответствии с настройками карты, некоторые EMS могут выполнять некоторые довольно хитрые трюки, которые могут помочь с плавностью хода, производительностью, экономичностью и выбросами. Большинство из них включают некоторую петлю обратной связи от различных датчиков двигателя и включают предположения о том, как используется двигатель.
Управление холостым ходом.
Когда двигатель работает на холостом ходу и при нормальной температуре, его потребности в воздушном потоке довольно постоянны, а опережение зажигания и холостой ход могут быть установлены с постоянной скоростью. Если какие-либо условия окружающей среды изменяются, E.G. температура двигателя, плотность воздуха и т. д., то может потребоваться изменение требуемого расхода воздуха, опережения зажигания и подачи топлива, чтобы двигатель мог работать на холостом ходу. В системе на основе карбюратора часто используется быстрый холостой ход, который устанавливается, когда двигатель холодный, что увеличивает скорость холостого хода, чтобы предотвратить остановку двигателя. В большинстве систем EMS используется система управления холостым ходом, когда двигатель работает на холостом ходу, клапан управления подачей воздуха на холостом ходу (IACV) позволяет дозировать подачу воздуха в двигатель независимо от дроссельной заслонки. Если число оборотов падает ниже допустимого предела, в двигатель попадает больше воздуха. Если число оборотов выходит за верхний предел, то всасывается меньше воздуха. Вместе с изменением подачи топлива эта система поддерживает стабильно стабильный холостой ход с приемлемыми выбросами в любых условиях, горячий или холодный двигатель.
Замкнутый контур.
Чтобы свести к минимуму выбросы, а также соответствовать современным ожиданиям в отношении экономичности, во многих системах EMS закодированы специальные процедуры для использования в ситуациях, когда двигатель не работает в условиях полной нагрузки, т.е. при движении на частичном дросселе. Большая часть движения по автомагистралям приходится на эти условия, особенно когда на автомобиле установлен круиз-контроль. EMS входит в состояние, известное как «работа с обратной связью», когда положение дроссельной заслонки и скорость двигателя более или менее постоянны, что указывает на крейсерский режим. В этом состоянии обратная связь от лямбда-зонда и датчика детонации используется для корректировки подачи топлива и опережения, чтобы обеспечить наилучшую экономию и эффективность. При работе в замкнутом контуре EMS будет постепенно обеднять смесь до тех пор, пока обратная связь от датчиков не укажет, что она приближается к детонации, и будет удерживать смесь непосредственно перед этой точкой, пока телеметрия двигателя не сообщит ей, что двигатель больше не работает. Это известно как «бедный круиз» и возможно только в том случае, если EMS имеет датчики лямбда и детонации.
Открытый цикл.
Не совсем умный режим работы, но включен сюда для полноты картины. На полном газу лямбда-зонд почти всегда игнорируется. Это называется работой с открытым циклом. В этой ситуации EMS основывает свои решения исключительно на информации, содержащейся в картах. Эта характеристика означает, что самообучение нельзя использовать (или полагаться на него) для обеспечения увеличенной подачи топлива на полном газу, необходимой для модификаций двигателя, которые увеличивают мощность и, следовательно, воздушный поток. Тем не менее, самообучение часто помогает при изменении требований, возникающих в условиях частичного открытия дроссельной заслонки.
Причина, по которой лямбда-зонд обычно игнорируется, заключается в том, что он может отображать концентрацию смеси только в довольно узком диапазоне соотношений воздух/топливо, и вполне вероятно, что его обратная связь будет заглушена подачей топлива при ускорении и при полностью открытой дроссельной заслонке. Некоторые системы оснащены широкополосным лямбда-зондом, который может сообщать о концентрации смеси в более широком диапазоне настроек и, следовательно, может давать полезную обратную связь, даже когда двигатель находится на широко открытой дроссельной заслонке и в рабочем диапазоне ускорения. Это может позволить EMS узнать о концентрации смеси и контролировать/регулировать подачу топлива даже в этих экстремальных условиях.
В этой ситуации большинство EMS также используют информацию карты только для опережения зажигания. Тем не менее, некоторые EMS используют обратную связь от датчика детонации в самообучающемся подходе, аналогичном тому, который используется с лямбда-зондом в системе впрыска.
Самообучение.
В дополнение к замкнутому контуру лямбда-зонд также используется в некоторых EMS как часть самообучающейся системы. Например, если регулятор давления топлива в вашем автомобиле работает неправильно и подает меньшее давление, чем должно, смесь, вероятно, будет немного бедной. Лямбда-зонд передает это обратно в EMS, которая затем увеличивает подачу топлива. Если это происходит постоянно, то EMS знает, что смеси всегда немного обеднены, и будет постоянно повышать их содержание. Он узнал, что смесь бедная и что необходимы более богатые смеси, и всегда будет выполнять эту коррекцию. Если впоследствии регулятор давления будет заменен или отремонтирован, система EMS будет постепенно заново обучаться новым требованиям. Этот процесс самообучения происходит в большинстве производителей EMS, но реже в системах послепродажного обслуживания. Самообучение концентрации смеси полностью зависит от лямбда-зонда.
Инжекторная резка.
В целях экономии и снижения выбросов некоторые EMS могут полностью отключать форсунки, когда двигатель перегружен, например, когда вы полностью отпускаете дроссельную заслонку. Форсунки возобновляют нормальную работу, когда обороты двигателя падают примерно на 500 об/мин выше холостого хода. Если вы внимательно посмотрите на свой тахометр, вы увидите, как стрелка немного поднимается, когда форсунки возобновляют подачу. Это более характерно для производителей EMS, а не для послепродажного обслуживания.
Самодиагностика.
Многие системы управления двигателем также имеют функцию «самодиагностики». Это позволяет вам исследовать EMS с помощью ПК, и он сообщит вам, возникла ли проблема. Например, если провод датчика температуры двигателя оборван, EMS сообщит, что от него нет сигнала. Некоторые EMS будут сообщать о неисправностях с помощью кодов неисправностей или мигающих огней, другие требуют подключения диагностического компьютера. Опять же, это чаще встречается в системах управления OE.
Контроль тяги, круиз-контроль и управление по проводам. Существуют области EMS, которые могут взаимодействовать с другими системами автомобиля, такими как контроль тяги и круиз-контроль. В более сложных системах отдельный блок управления тягой может связываться с EMS, чтобы активировать переменный предел оборотов, который снижает крутящий момент двигателя, если он обнаруживает, что тяга теряется, обычно это делается с помощью мягкого ограничителя оборотов, который вызывается по желанию. . В других системах EMS фактически может сбросить газ.
Некоторые современные системы EMS, устанавливаемые вместе с интеллектуальными или адаптивными трансмиссиями, предназначены для совместной работы с трансмиссией. Распространенной практикой является «управление по проводам», когда нет прямой связи между акселератором и дроссельной заслонкой, вместо этого шаговый двигатель, управляемый EMS, применяет дроссельную заслонку. Это упрощает управление двигателем круиз-контролем или адаптивной трансмиссией. как считает нужным. Система контроля тяги может сбросить газ в ответ на потерю тяги, система круиз-контроля будет одновременно включать и выключать газ, чтобы поддерживать запрограммированную скорость
Ограничение оборотов.
В большинстве систем EMS используется ограничитель оборотов, некоторые допускают мягкое включение, когда двигатель выборочно пропускает зажигание, за которым следует жесткое включение чуть выше, когда двигатель просто глохнет. Некоторые ограничители отсекают всю подачу топлива при заданной частоте вращения двигателя, удерживая ее до тех пор, пока вы не опуститесь на 500 об/мин ниже предела. Другие ограничители оборотов отключают искру (или форсунки) отдельных цилиндров один за другим, постепенно обрезая все больше и больше, пока не будет достигнут предел «жесткого ограничения», так что вы едва почувствуете, что достигли максимально допустимых оборотов. Эти мягкие ограничители означают, что автомобиль можно использовать прямо на пределе оборотов, не беспокоясь. Обычно EMS будет постоянно поддерживать сигнал тахометра, чтобы гарантировать, что он не сойдет с ума. Часто ограничение оборотов сочетается с индикатором переключения передач, который предупреждает водителя о том, что ограничитель оборотов вот-вот сработает и ему следует переключиться на более высокую передачу. В системах дозированного и группового впрыска выборочное прекращение подачи топлива может быть опасным, поскольку топливо не впрыскивается в оптимальное время для каждого цилиндра, и вполне возможно, что цилиндр введет только частичный заряд топлива, что может привести к детонации двигателя ( стук в двигателе) и вызванные этим повреждения.
Тахометр и сигнализатор.
Большинство систем EMS управляют тахометром (счетчиком оборотов) напрямую, что позволяет им сохранять показания тахометра даже при срабатывании ограничителя числа оборотов. Некоторые послепродажные EMS также предоставляют контрольную функцию, которая переводит стрелку тахометра на самые высокие обороты, достигнутые во время ее предыдущего использования.
Управление вентилятором.
Системы EMS, установленные на серийных автомобилях, также могут управлять другими аспектами систем двигателя. Очень часто EMS управляет вентилятором охлаждения, включая и выключая его по мере необходимости.
Впрыск воды.
Некоторые системы EMS могут управлять вторичной системой впрыска воды, которая используется в двигателях с наддувом для охлаждения поступающего заряда и предотвращения детонации двигателя. Они также могут быть способны управлять распылителями водяного охлаждения на охладителях наддува, которые помогают охлаждать воздух, поступающий в двигатель.
Впрыск закиси азота.
Закись азота (NO2) представляет собой газ, который содержит гораздо больше кислорода, чем воздух, по весу; NO2 часто используется для увеличения мощности двигателя. Он впрыскивается с дополнительным топливом и эффективно увеличивает количество топлива и кислорода, вводимых в двигатель, с эффектами, аналогичными турбонаддуву или наддуву. В некоторых системах EMS предусмотрена возможность управления впрыском азота и потребностью в дополнительном топливе.
Turbo Anti Lag.
Одной из проблем, связанных с двигателями с турбонаддувом, является время, необходимое турбонагнетателю для набора скорости и обеспечения наддува. Когда двигатель разгоняется, турбонагнетатель быстро вращается и создает наддув, но когда происходит переключение передач или когда дроссельная заслонка поднимается, турбонагнетатель замедляется, и наддув падает. Для возобновления работы наддува требуется некоторое время, что означает, что двигатель выйдет из диапазона мощности. Это время между посадкой акселератора и появлением наддува называется «турбо-лаг», потому что турбо отстает от акселератора. Некоторые системы EMS могут свести к минимуму это, поджигая смесь, когда выпускной клапан открыт, затем смесь выходит из выпускного клапана на высокой скорости, вместо того, чтобы пытаться толкать поршень вниз, «удар» от выхлопа поддерживает скорость турбонагнетателя. и минимизирует отставание. Как правило, это делается только при выключенном двигателе, поэтому, хотя цилиндр не работает должным образом, чистое влияние на характеристики автомобиля незначительно, однако влияние на скорость вращения турбокомпрессора весьма заметно. Зажигание цилиндра при открытом выпускном клапане также обеспечивает те впечатляющие выходки с обратным выстрелом и стуком, которые так часто можно услышать в некоторых гоночных автомобилях.
Выходы и управление вспомогательными устройствами.
Поскольку EMS так много знает о состоянии двигателя, часто бывает полезно иметь возможность использовать эту информацию для управления другими системами, связанными с двигателем. Многие системы EMS предоставляют выходные данные или каналы, которые позволяют более предприимчивым использовать информацию EMS для улучшения других аспектов автомобиля. Информация EMS может использоваться, например, для отключения генератора переменного тока на высоких оборотах и, таким образом, для минимизации паразитных потерь, связанных с тем, что мощность требуется больше всего, или для модуляции вентилятора охлаждения в то время, когда требуется мощность двигателей.
Управление зажиганием.
Существует два типа систем управления зажиганием: те, которые запускаются распределителем, и те, которые запускаются датчиком положения коленчатого вала, часто называемым без распределителя. Использование термина «меньше распределителя» может ввести в заблуждение, поскольку во многих системах, запускаемых кривошипом, по-прежнему используется крышка распределителя и рычаг ротора для направления искры в соответствующий цилиндр. В этих системах датчик коленвала, а не распределитель, запускает EMS.
Дистрибьютор.
Системы на основе распределителя используют обычный распределитель для запуска EMS, но распределитель не имеет встроенного механизма продвижения. Обычно триггер срабатывает задолго до точки зажигания, и EMS срабатывает, когда нужно запустить катушку зажигания. Затем искра подается к соответствующему цилиндру обычным способом через плечо ротора и высоковольтные провода.
Кривошипно-пусковой механизм.
Поскольку системы, запускаемые с помощью кривошипа, знают только положение двигателя, а не положение цикла, им нужен способ гарантировать, что правильный цилиндр получает искру. Есть три распространенных способа достижения этого.
Первый заключается в использовании обычной крышки распределителя и рычага ротора, который обычно крепится к концу одного из распределительных валов и направляет искру в соответствующий цилиндр.
Второй метод заключается в использовании двух катушек, соединенных в пары с цилиндрами зажигания 1 и 4 и 2 и 3 соответственно. Когда одна из катушек срабатывает, она посылает искру на оба цилиндра. Один из них будет на такте зажигания и будет нормально срабатывать, другой будет на стадии продувки цикла (такт выпуска), где искра будет потеряна, по этой причине эти системы обычно известны как «потерянная искра».
Третий метод заключается в использовании дополнительного датчика на одном из распределительных валов, чтобы система EMS знала о положении цикла двигателя и могла запускать соответствующий цилиндр в нужное время, используя отдельные катушки для каждого цилиндра.
Управление зажиганием с триггером распределителя
Этот тип расположения используется с ранними системами EMS, такими как система Ford ESC. Он также популярен для приложений послепродажного обслуживания, поскольку позволяет установщику максимально повторно использовать существующие компоненты. Любые неточности в изготовлении распределителя отражаются в распределении времени между цилиндрами, поскольку искра всегда соответствует точкам срабатывания, заданным распределителем. Обычно распределитель срабатывает четыре раза за цикл двигателя, т.е. два раза за оборот двигателя.
У распределителя не будет установлен механизм подачи или он будет отключен, поскольку система EMS обеспечивает потребности двигателей.
Как это работает.
Обычно распределитель «срабатывает» примерно на 65-70 градусов перед ВМТ, так как это больше, чем ожидаемое максимальное опережение. Затем EMS просматривает карту зажигания, чтобы рассчитать соответствующее значение времени для скорости и нагрузки двигателя, а затем, используя скорость двигателя в качестве фактора, рассчитает, как долго ждать до зажигания искры. Начальная точка срабатывания должна быть как минимум максимальной опережающей цифрой плюс задержка в несколько градусов, чтобы микропроцессор мог выполнять свою работу.
Обычная крышка распределителя и ротор ротора обеспечивают подачу искры в нужный цилиндр, поскольку EMS будет производить искру каждый раз, когда на распределитель подается импульс. Учитывая, что система получает импульс от распределителя для каждого из соответствующих цилиндров, не составит труда использовать информацию о срабатывании системы впрыска для обеспечения последовательного впрыска. Однако было бы необходимо иметь дополнительную обратную связь, чтобы определить, какой из импульсов принадлежит цилиндру номер 1. Я видел, как это делается, прикрепляя индуктивный датчик к проводу свечи зажигания номер один.
Управление зажиганием с триггером распределителя
Этот тип системы представляет собой промежуточный вариант системы, полностью лишенной распределителя, сохраняются только крышка распределителя и рычаг ротора, остальная часть распределителя отсутствует, обычно рычаг ротора устанавливается на конец распределительного вала и крышка распределителя прикручены болтами. Он имеет большинство преимуществ системы без распределителя, поскольку в нем используется датчик кривошипа. Однако EMS не знает о положении цикла двигателей, поэтому она может обеспечить только пакетный или групповой впрыск.
МЭМС серии Rover «K» использует эту систему для базовой реализации и, следовательно, может обеспечить только групповое впрыскивание. Некоторые двигатели Vauxhall также используют эту систему. Это очень популярный и недорогой способ реализации управляемого зажигания. Это позволяет производителю повторно использовать многие составные части более ранних систем, основанных на дистрибьюторах.
Как это работает.
Система EMS получает информацию о положении ВМТ от датчика коленчатого вала и, подсчитывая зубья, может точно определить, где находится двигатель в любой момент времени. Он использует эту информацию вместе с информацией от датчика положения дроссельной заслонки/датчика абсолютного давления для поиска соответствующих настроек опережения зажигания по карте зажигания. Затем он может точно определить, когда запускать катушку. Катушка срабатывает дважды за оборот двигателя в противоположных положениях вращения двигателя, потому что, когда цилиндры 1 и 4 находятся в ВМТ, цилиндры 2 и 3 находятся в НМТ, и наоборот. Затем искра направляется к соответствующему цилиндру с помощью рычага ротора и крышки.
Управление зажиганием без распределителя Неиспользованная искра
В этом типе системы полностью отсутствует распределитель, используется датчик коленчатого вала для указания положения ВМТ, а затем используются сигналы от датчика и информация карты для определения момента зажигания искра (два раза за оборот). Он группирует сигналы для двух отдельных катушек, которые обеспечивают искру для пар цилиндров, находящихся в одном и том же относительном положении кривошипа. Один из этих цилиндров будет в такте зажигания и воспламенится, другой будет в такте продувки, и, следовательно, искра будет «потеряна», поэтому эти системы обычно известны как системы «потерянной искры». На практике катушки обычно имеют два конца, и от каждого конца к каждому из цилиндров в паре идет провод высокого напряжения.
Этот тип системы используется в двигателях Ford Z-tec и Vauxhall 16V
Существуют варианты системы искрового разряда, в которой используются отдельные катушки для каждого цилиндра, соединенные параллельно, а не пара катушек, каждая из которых обслуживает два цилиндра. .
Как это работает.
Система EMS получает информацию о положении ВМТ от датчика коленчатого вала и, подсчитывая зубья, может точно определить, где находится двигатель в любой момент времени. Он использует эту информацию вместе с информацией от датчика положения дроссельной заслонки/датчика абсолютного давления для поиска соответствующих настроек опережения зажигания по карте зажигания. Затем он может точно определить, когда запускать катушки. Каждая катушка срабатывает один раз за оборот двигателя в точно противоположных положениях вращения двигателя, потому что, когда цилиндры 1 и 4 находятся в ВМТ, цилиндры 2 и 3 находятся в НМТ, и наоборот. Искра идет к обоим парным цилиндрам.
Управление зажиганием без распределителя с датчиком кулачка
Этот тип системы похож на систему «искры напрасно» тем, что в ней нет распределителя и несколько катушек, в ней есть датчик фазы кулачка в дополнение к датчику коленвала, который позволяет EMS чтобы определить, где в цикле двигателя находится каждый отдельный цилиндр. На каждый цилиндр приходится отдельная катушка, и тогда EMS может запустить соответствующую катушку.
Датчик фаз газораспределения также может использоваться системой впрыска для обеспечения надлежащего последовательного впрыска. МЭМС Rover, установленная на двигателе VVC, использует такую систему, но использует только две катушки в соответствии с настройкой неиспользуемой искры. Датчик фазы кулачка также используется системой EMS для управления механизмом VVC. EMS на Subaru Imprezza использует этот тип системы.
Как это работает.
Система EMS получает информацию о положении ВМТ от датчика коленчатого вала и, подсчитывая зубья, может точно определить, где находится двигатель в любой момент времени. Он также получает информацию о положении цикла двигателя от датчика фазы распредвала. Он использует эту информацию вместе с информацией от датчика положения дроссельной заслонки/датчика абсолютного давления для поиска соответствующих настроек опережения зажигания по карте зажигания. Используя датчики положения кривошипа и кулачка, он может точно определить, когда запускать каждую отдельную катушку, поскольку он знает, какой цилиндр находится в положении запуска цикла. Индивидуальная катушка каждого цилиндра срабатывает один раз за цикл двигателя в точно соответствующее время. Искра направляется непосредственно в соответствующий цилиндр.
Регулировка времени.
При нормальном развитии событий, когда двигатель работает при правильной температуре в определенных условиях, EMS будет использовать нагрузку и частоту вращения двигателя для определения правильного угла опережения зажигания по карте, однако существуют обстоятельства, при которых EMS может потребоваться изменить опережение зажигания. Обычно они сводятся к четырем обстоятельствам: температура двигателя/охлаждающей жидкости, температура воздуха, детонация и запуск.
Температура охлаждающей жидкости.
При низкой температуре охлаждающей жидкости время горения в цилиндрах больше, чем при полностью прогретом двигателе, и для регулировки угла опережения зажигания обычно требуется небольшое опережение. EMS обычно имеет небольшую карту регулировок момента зажигания, отсортированных по температуре охлаждающей жидкости, которые добавляются к базовым значениям момента зажигания.
Температура воздуха.
Когда температура воздуха меняется, меняется и время горения вводимой смеси, поскольку она менее плотная, и снова к базовым значениям времени добавляется небольшая карта корректировок воспламенения в зависимости от температуры воздуха.
Датчик детонации.
Во время работы двигателя могут быть моменты, даже после применения регулировок, когда рассчитанное время не соответствует требованиям двигателя. Иногда это может привести к «порозовению» («стуку» или «звону»), когда смесь сгорает так быстро, что встречается с поршнем непосредственно перед ВМТ, пока он еще находится на такте сжатия, а не с поршнем сразу после ВМТ на такте сжатия. рабочий ход. Это очень вредно для двигателя. В некоторых системах EMS есть акустический датчик, называемый «датчиком детонации», который улавливает стук и информирует EMS, когда это происходит. Затем EMS может отрегулировать синхронизацию, чтобы предотвратить появление детонации в двигателе.
Визуальное предупреждение о детонации
Инструмент для настройки детонации
Запуск или запуск двигателя.
При запуске двигателя его эффективные обороты довольно низкие, около 200 об/мин или около того. Если момент зажигания, используемый на холостом ходу, установлен примерно на 25 градусов (что примерно соответствует среднему значению для двигателя с картой), есть вероятность, что поршень ударит воспламененную смесь, все еще находясь на такте сжатия. Это будет иметь эффект толкания поршня вниз против его нормального вращения, фактически это «стук» на скоростях проворачивания. Это известно как «отдача» и обычно характеризуется «напряжением» и замедлением стартера, что затрудняет запуск двигателя и может легко вывести из строя стартер в короткие сроки.
Это обычная проблема для двигателей, оснащенных механическими системами зажигания и более экстремальными кулачками, поскольку двигателю требуется большое опережение зажигания на холостом ходу для правильной работы. К сожалению, это дополнительное опережение также может вызвать «отдачу», и механическая система не может различать синхронизацию между запуском и холостым ходом.
Системы на основе EMS решают эту проблему, используя отдельное значение времени для проворачивания коленчатого вала/запуска, которое обычно устанавливается на уровне 5-8 градусов. Это достаточно низко, чтобы предотвратить отдачу, но достаточно высоко, чтобы запустить двигатель; в момент запуска двигателя используется соответствующая настройка зажигания из базовой карты.
2D и неотображенные системы по сравнению с 3D-отображенными системами.
Послепродажные системы зажигания с картированием теперь довольно распространены, вы можете задаться вопросом, какие преимущества они предлагают по сравнению с обычной системой зажигания. Обычная система зажигания представляет собой двумерную систему, которая учитывает только частоту вращения двигателя, а не нагрузку на двигатель; он дает постоянную синхронизацию, которая зависит только от оборотов двигателя. При полностью открытой дроссельной заслонке это приемлемо, однако при частичном открытии дроссельной заслонки экономичность и ходовые качества серьезно ухудшаются. С другой стороны, с некоторыми высокопроизводительными двигателями требуемое опережение может не изменяться линейно, в диапазоне скоростей двигателя могут быть места, где требуемое опережение может падать, даже если число оборотов увеличивается.
Некоторые 2D-системы вносят свой вклад в изменение угла опережения зажигания в зависимости от нагрузки, устанавливая вакуумное опережающее устройство, которое опережает зажигание, когда вакуум во впускном коллекторе высок, например. когда нагрузка на двигатель низкая, но это будет в лучшем случае грубо. Настроенная система может обеспечить точное опережение зажигания независимо от частоты вращения двигателя или нагрузки. Это значительно улучшает управляемость двигателя, а также значительно повышает экономичность.
Чтобы оценить разницу между 2D- и 3D-картографической системой зажигания, вы должны немного понимать процесс сгорания в вашем двигателе. Когда топливно-воздушная смесь воспламеняется в камере сгорания, горение заряда начинается на свече зажигания и с этой точки распространяется по всей смеси. Требуется определенное количество времени, чтобы весь заряд в камере сгорел, расширился и, следовательно, заставил поршень двигаться вниз по каналу ствола. Вот почему мы должны начать процесс зажигания до того, как поршень достигнет верхней мертвой точки. Это время опережения называется опережением зажигания.
Из этого следует, что по мере увеличения оборотов двигателя и увеличения оборотов двигателя остается меньше времени для сгорания заряда в камере, следовательно, необходимо увеличивать опережение зажигания при увеличении оборотов двигателя. До эпохи сложной электроники опережение зажигания всегда контролировалось механически, в самые первые дни с помощью рычага, установленного на рулевом колесе или руле машины. Водитель или наездник изменял опережение по своему усмотрению, ориентируясь на «чувство» двигателя — не всегда слишком удачно
Затем последовала механическая система продвижения, основанная на центробежной системе грузов, расположенных в распределителе. По мере того, как скорость двигателя увеличивалась, центробежная сила, действующая на грузы, увеличивалась и заставляла их двигаться наружу, преодолевая сопротивление пары заводных пружин и тем самым опережая зажигание. Пружины оттягивали грузы назад, когда двигатель снова замедлялся, уменьшая опережение. Ряд упоров и различных натяжных пружин позволяли контролировать опережение зажигания или изменять его от одного двигателя к другому в зависимости от частоты вращения двигателя.
Но есть еще один фактор, влияющий на опережение, который необходимо учитывать – наполнение баллона. Скорость, с которой горит смесь в камере сгорания, зависит от степени сжатия заряда. Это, в свою очередь, зависит от того, насколько заполнен цилиндр перед сжатием. Например: при малом открытии дроссельной заслонки на более высоких оборотах цилиндр будет заполняться только частично, по сравнению с широко открытой дроссельной заслонкой при той же частоте вращения двигателя. Из этого следует, что вам нужны разные моменты зажигания для одной и той же частоты вращения двигателя, но в зависимости от положения дроссельной заслонки или нагрузки на двигатель.
Производители систем продвижения с центробежным распределителем часто оснащают вакуумным устройством подачи. Это сдвигает синхронизацию на большее опережение, когда во впускном коллекторе присутствует высокий вакуум (дроссельная заслонка закрыта или почти закрыта). Проблема с этими механическими системами заключалась в том, что они были грубыми в эксплуатации, а движение опорной пластины распределителя на высоких оборотах вызывало разброс времени. По этой причине в большинстве высокопроизводительных двигателей было удалено вакуумное опережение, а опорные плиты заварены.
EMS может управлять зажиганием с очень небольшим количеством движущихся частей; все, что ему нужно, это триггер и какой-нибудь датчик нагрузки. EMS знает нагрузку на двигатель, а также обороты двигателя. Поскольку момент зажигания сопоставляется для каждой частоты вращения двигателя и нагрузки, момент зажигания является оптимальным для двигателя для каждого режима нагрузки, включая неполный дроссель. Это обеспечивает максимально возможную производительность и экономичность независимо от положения дроссельной заслонки. Кроме того, поскольку системы запуска неизменно не имеют точек физического износа, синхронизация остается правильно установленной более или менее неопределенно долгое время и не требует технического обслуживания. Есть и другие побочные эффекты, такие как ограничение оборотов, индикатор переключения передач, точное вождение тахометра и контрольный сигнал, а также уверенность в том, что время никогда не «сработает».
Чтобы оценить преимущества картографической системы, нужно испытать ее на себе: реакция дроссельной заслонки острая, как бритва, экономичность улучшена, а управляемость (особенно с более радикальными кулачками) потрясающая. По моему собственному опыту, двигатель, преобразованный из системы центробежного опережения в систему с преобразованием, претерпевает преобразование.
Преобразование зажигания из несопоставленной системы.
Преобразование обычной системы на основе дистрибьютора в систему с картированием не так сложно, как вы думаете. В дополнение к блоку зажигания EMS / Mapped вам понадобится потенциометр дроссельной заслонки для измерения угла дроссельной заслонки (и, следовательно, нагрузки), который необходимо прикрепить к вашему шпинделю дроссельной заслонки, и распределитель без механизма опережения вместо существующего распределителя. Большая часть существующей системы зажигания, катушки, проводов, свечей зажигания, крышки распределителя и ротора обычно может быть сохранена.
В качестве альтернативы замене распределителя на существующем можно заблокировать механизм продвижения, чтобы обеспечить постоянную подачу сигнала на EMS. Это можно сделать, просверлив грузы и опорную плиту и вставив саморез, или припаяв/сварив в MIG сплошной механизм продвижения.
Службе EMS потребуется электронный сигнал от дистрибьютора, поэтому дистрибьютор на основе баллов не подойдет. Большинство двигателей после 1980 года имеют электронное зажигание, поэтому, если ваш двигатель не имеет электронного распределителя, обычно можно найти более поздний распределитель для вашего двигателя, который имеет магнитный релюктор или триггер на эффекте Холла. Некоторые более поздние версии вашего двигателя вполне могут иметь установленную на заводе систему EMS, в которой используется распределитель с эффектом Холла или с принудительным срабатыванием, который также может не иметь механизма опережения, если это так, это идеально. Если вы не можете найти подходящую замену, вместо очков подойдет ушко Lumenition.
Для EMS потребуется довольно простая проводка и, очевидно, потребуется сеанс картирования на катящейся дороге, у большинства поставщиков EMS есть примеры карт, которые являются «безопасными» и помогут вам начать работу для вашей поездки по катящейся дороге.
Карта двигателя.
Как правило, картирование двигателя происходит в контролируемой среде, где температура двигателя и температура воздуха могут контролироваться или, по крайней мере, измеряться. В системах послепродажного обслуживания отображение обычно выполняется с помощью портативного ПК, подключенного к EMS через последовательный кабель. Программное обеспечение, поставляемое производителем EMS, обычно позволяет повторно отображать требования к топливу и зажиганию с различной степенью гибкости и простоты использования.
EMS обычно может передавать обратно на ПК всю необходимую информацию о телеметрии двигателя; температура охлаждающей жидкости и воздуха, число оборотов в минуту, место нагрузки, текущее время, текущая заправка топливом, показания лямбда и т. д. при работающем двигателе. Для производителя двигатель будет установлен на испытательном стенде, который сможет точно контролировать и контролировать работу двигателя и окружающую среду.
Картографирование уже установленного двигателя обычно выполняется на катящейся дороге, имеющей устройство «привязки», которое может удерживать ролики на фиксированной скорости независимо от входного крутящего момента. Катящаяся дорога представляет собой набор катков, по которым транспортное средство может имитировать вождение. Ролики прикреплены к «тормозу», который может измерять прилагаемую к ним вращающую силу и скорость ролика. Используя эти две части информации, можно измерить мощность, прикладываемую к роликам ведущими колесами вагонов. Как правило, двигатель создает максимальный крутящий момент для любой заданной скорости и нагрузки, когда подача топлива и синхронизация оптимальны.0003
Запуск.
Когда карты нет, первый трюк — запустить двигатель. Зажигание установлено на 20 градусов или около того на участках скорости 0 и 1 на участке нагрузки 0. Топливо добавляется на этих участках путем динамического увеличения количества топлива на карте по мере запуска двигателя до тех пор, пока двигатель не заработает. Если температура двигателя очень низкая, то к карте применяется определенная коррекция, позволяющая запустить двигатель, после запуска двигателю разрешается прогреваться, используя только первые положения нагрузки и скорости.
Если двигатель начинает глохнуть, подача топлива изменяется, чтобы «очистить» работу, возможно, требуется отрегулировать дроссельную заслонку и балансировку, чтобы двигатель заработал, это обычно делается до начала картирования. К тому времени, когда двигатель прогреется, подача топлива на этом участке нагрузки/скорости будет отрегулирована почти до нужного уровня. Затем этот топливный параметр можно использовать в качестве основы для всех участков скорости при этой конкретной нагрузке двигателя, этого будет достаточно в качестве отправной точки, и он позволит двигателю работать на этих скоростях двигателя.
Следующим шагом является корректировка подачи топлива и зажигания на холостом ходу до тех пор, пока холостой ход не будет соответствовать желаемой частоте вращения двигателя и не станет достаточно чистым. Это связано с тем, что картирование включает в себя много остановок и запусков двигателя, если настройки холостого хода неверны, аккумулятор быстро разрядится. Довольно часто синхронизация на участке скорости чуть выше холостого хода устанавливается на очень низкое значение, что предотвращает гонку двигателя на холостом ходу. Если частота вращения двигателя увеличивается, синхронизация падает и снова вызывает падение скорости, аналогично на участке скорости ниже холостого хода синхронизация устанавливается достаточно высокой, чтобы «подтолкнуть» двигатель, если скорость холостого хода падает. Как только это будет сделано, картирование может начаться всерьез.
Процесс сопоставления.
Катящаяся дорога настраивается на удержание определенного числа оборотов в минуту путем вождения автомобиля на катках на высокой передаче до тех пор, пока не будет достигнуто это число оборотов, и «привязывания» катков. Применяя дроссельную заслонку, оператор может удерживать двигатель в положении фиксации роликов, чтобы скорость двигателя и положение дроссельной заслонки были постоянными. В этот момент подача топлива регулируется до тех пор, пока показания лямбда не укажут, что смесь является стехиометрической (химически правильной).
Если на каком-либо этапе этой регулировки будет слышен пинк, то оператор снизит отсчет времени. Затем оператор будет регулировать синхронизацию до тех пор, пока ролики не покажут максимальный крутящий момент, внимательно прислушиваясь к детонации. Если крутящий момент начнет падать или оператор услышит стук, это означает, что двигатель перегружен, и оператор замедлит синхронизацию.
В точке максимального крутящего момента оператор сбрасывает синхронизацию до тех пор, пока крутящий момент не начнет падать. Это означает, что двигатель будет установлен на минимальное опережение для максимальной эффективности или минимального оптимального времени.
Использование этой методики сводит к минимуму возможность стука или детонации двигателя при работе. После того, как определенная частота вращения двигателя и участок нагрузки нанесены таким образом на карту, значения подачи топлива и воспламенения могут быть экстраполированы на все последовательные участки скорости для этой конкретной нагрузки двигателя в качестве отправной точки. Даже если они не будут правильными, они будут достаточно близко, чтобы двигатель мог работать. После этого оператор продолжит работу на каждой площадке загрузки с этой частотой вращения двигателя.
Этот процесс повторяется для каждой последующей скорости и загрузки сайта (или, по крайней мере, тех, которые могут быть достигнуты), пока процесс сопоставления не будет завершен. После того, как общая карта сделана, внимание можно уделить корректировкам или исправлениям карты, а именно пуску двигателя, ускорению/торможению, подпитке и регулировке холодного запуска. Самым сложным из них является регулировка холодного пуска, так как двигатель теперь будет вонючим горячим. Часто владельцу необходимо отрегулировать их, чтобы обеспечить наилучший запуск, хотя оператор обычно может предоставить некоторые разумные оценки для регулировки холодного запуска. Важно убедиться, что карты, которые только что были созданы, сохранены на жестком диске, оператор несет ответственность за то, чтобы карта была извлечена из EMS, а затем сохранена.
Именно во время этого сопоставления качество программного обеспечения играет важную роль, простота использования и интуитивно понятное отображение информации имеют решающее значение, если сопоставление должно выполняться безопасно и своевременно.
Когда движок закартирован, очень интересно изучить карты. Обычно информацию о карте (после небольшой обработки) можно импортировать в Excel или аналогичный файл и нанести на график в виде контура поверхности. Некоторые системы EMS (например, система Emerald M3D и GEMS) имеют встроенный графический дисплей, позволяющий просматривать карты в виде контура поверхности или каркасного графика. Визуализация карт таким образом дает гораздо лучшее и более четкое представление о потребностях двигателей в топливе и помогает сгладить любые «сбои» в картах.
Обычно значения расхода топлива очень малы при частичном открытии дроссельной заслонки и значительно увеличиваются при открытии дроссельной заслонки (поскольку в двигатель поступает больше воздуха). Пики на топливной карте обычно находятся там, где находятся пики на кривой крутящего момента, и в большинстве случаев топливо падает выше пикового крутящего момента, даже если мощность может расти. Это связано с тем, что наполнение цилиндра или объемная эффективность ниже пикового крутящего момента. Хотя двигатель потребляет больше топлива, он потребляет меньше топлива за один оборот, поскольку потребляет меньше воздуха за один оборот.
Часто оператор предоставляет положение без топлива на участке максимальной нагрузки на участке нулевой скорости, это необходимо для очистки залитого двигателя. Затем, чтобы очистить двигатель от топлива, необходимо максимально открыть дроссельную заслонку, а затем провернуть коленчатый вал. Поскольку корректировки подачи топлива при холодном пуске и проворачивании коленчатого вала являются процентными поправками к топливной карте, при применении к нулевому топливу они также будут нулевыми.
Карты опережения зажигания выглядят несколько иначе, при неполном дросселе опережение зажигания, как правило, намного выше, часто достигая более 45 градусов, так как частично заполненные цилиндры сгорают гораздо медленнее и требуют большего опережения зажигания. Именно эта часть отображения дроссельной заслонки имеет решающее значение для гибкости двигателя, особенно при выключенном кулачке. Около холостого хода значения синхронизации будут довольно большими, чтобы поддерживать стабильный холостой ход, и быстро упадут выше холостого хода, чтобы двигатель не разгонялся. Пиковое время при полностью открытой дроссельной заслонке обычно достигается при 3500-4000 об/мин, и в зависимости от типа двигателя может потребоваться дальнейшее небольшое увеличение выше 7500 об/мин.
Переоборудование под дроссельные заслонки/управление от карбюраторов.
Преобразование существующей установки на основе карбюратора относительно просто, при условии, что вы полностью понимаете, что требуется для установки. Если вы заменяете карбюраторы, вам потребуются следующие детали ТНВД высокого давления
Регулятор давления топлива
Некоторые форсунки нужной производительности
Соответствующие «защелкивающиеся» разъемы для проводки форсунок
Конфигурация дроссельных заслонок (опционально с коллектором)
A Тяга дроссельной заслонки
Датчик положения дроссельной заслонки (обычно входит в комплект EMS)
Датчик температуры охлаждающей жидкости ( обычно поставляется с EMS)
Датчик температуры воздуха (обычно поставляется с EMS)
Топливная рампа (часто входит в комплект поставки TB)
Воздушные рожки и воздушный фильтр
Большое количество резиновых топливных шлангов высокого давления и хомутов
Топливная трубка диаметром 8 мм.
Если вы переходите с существующей системы впрыска на основе пленума, вам может не понадобиться переделывать топливный бак, и обычно можно сохранить топливный насос, форсунки, топливную рампу и регулятор давления. Довольно часто дроссельная заслонка и датчик охлаждающей жидкости также являются многоразовыми.
Топливный бак.
Основным фактором, который следует учитывать при переходе с карбюраторов на инжекторные, является система подачи топлива. Топливный бак является первым звеном в цепи подачи топлива. Обычный топливный бак без перегородки не подходит для двигателя с впрыском топлива, поскольку под действием различных перегрузок, возникающих в движущемся автомобиле, топливо может отходить от всасывающего устройства бака и заставлять топливный насос подсасывать воздух. В системе на основе карбюратора карбюратор имеет поплавковую камеру, из которой можно всасывать топливо, если подача насоса иссякает. С другой стороны, система впрыска не имеет такого резервуара; если подача топлива к насосу иссякает, двигатель глохнет из-за нехватки топлива. Это усугубляется тем, что топливный насос все время работает с системой впрыска, а избыток топлива отводится обратно в бак через регулятор давления.
Есть два способа справиться с нехваткой топлива. Один из способов состоит в том, чтобы разделить бак на отсеки, т.е. соорудите отсек вокруг выпускного отверстия насоса, герметичный для жидкости, и используйте односторонние клапаны, которые пропускают топливо в отсек, но не выпускают обратно, это удерживает топливо в области выпускного отверстия насоса. Это можно дополнить, установив небольшой обычный вспомогательный насос, который может перекачивать топливо с противоположного конца бака, чтобы противодействовать влиянию выброса топлива. Другой способ — использовать топливный резервуар или расширительный бак, вмещающий литр или около того топлива, которое снабжает насос независимо от состояния топлива в баке. Он подается небольшим насосом из бака или самотеком и его хватает на несколько секунд работы двигателя. Обеспечение того, чтобы топливо, возвращаемое из регулятора давления, направлялось к выпускному отверстию насоса, также может свести к минимуму последствия помпажа в топливном баке.
Нельзя переходить на впрыск и не обращать внимания на свой топливный бак; он обязательно должен быть перекрыт и разделен на отсеки или снабжен накопительным баком.
Топливный насос, магистрали и регулятор.
Топливный насос высокого давления сильно отличается от обычного топливного насоса, используемого для питания карбюраторов; во-первых, он работает постоянно, а не «глохнет», как это делает обычный насос при заполнении поплавковых камер. Он также подает топливо под гораздо более высоким давлением, чем обычный насос, около 80-100 фунтов на квадратный дюйм по сравнению с 5-6 фунтов на квадратный дюйм. Также важно, чтобы насос питался под действием силы тяжести, поскольку впрыскивающий насос разработан как «выдувной», а не «всасывающий». Требование самотечной подачи насоса обычно означает, что он должен быть установлен под топливным баком и рядом с ним, поэтому для подключения к этой области требуется источник питания с предохранителем. Поскольку топливо непрерывно подается и возвращается в бак, требуются две топливные трубы: подающая и обратная. Обычно существующий топливопровод можно использовать в качестве обратной трубы, а для подачи проложить новый трубопровод. При подключении к насосу абсолютно необходимо использовать топливную трубу высокого давления, обычный резиновый шланг не подойдет, он лопнет и вызовет опасность возгорания, убедитесь, что вы используете только шланг надлежащего номинала, способный выдерживать давление более 60 фунтов на квадратный дюйм. Вход в насос обычно имеет внутренний размер 12 мм, поэтому отвод от бака также должен быть такого же размера. Остальная часть топливной трубы может быть изготовлена из медных или стальных труб диаметром 8 мм. Убедитесь, что концы трубы «расширены», чтобы обеспечить целостность любых соединений.
Инъекционные насосы издают шум, поэтому перед установкой убедитесь, что вы установили насос в какую-либо опору, подвешенную на резиновых хлопчатобумажных катушках, или обернули его каким-либо звукопоглощающим материалом. Не рискуйте с насосом, он должен быть должным образом изолирован и не иметь утечек.
Впрыскивающие насосы требуют, чтобы топливо было отфильтровано до того, как оно попадет в насос, в некоторых случаях это сделать непросто, однако любая грязь или мусор, попадающие в насос, могут привести к его заклиниванию, что сделает его неработоспособным или поврежденным. Там, где пространство ограничено, на входе в насос можно использовать сито из тонкой проволочной сетки, при условии, что оно установлено таким образом, что не может попасть в насос, это будет задерживать любые частицы разумного размера. Если вы используете этот метод, убедитесь, что вы регулярно чистите / меняете сетку и устанавливаете правильный топливный фильтр после насоса.
На свалках можно найти множество ТНВД, большинство автомобилей, выпущенных после 1989 года, оснащены системами впрыска и являются хорошим источником ТНВД и форсунок. Если вы выбираете автомобиль с двигателем подходящего размера, то насос должен работать, вполне вероятно, что форсунки тоже не будут далеко. Вполне возможно, что регулятор давления топлива может подойти, если предположить, что он не интегрирован с топливной рампой. Мои насос-форсунки и регулятор давления пришли от сломанной Sierra Cosworth. В качестве альтернативы вы можете приобрести насос у производителя двигателей или у специализированного поставщика.
Индукционная система.
Если на вашем двигателе уже установлены двойные клапаны Weber или Dellortos, то очевидным выбором системы впуска является комплект корпуса дроссельной заслонки, совместимый с фланцем, такой как корпус дроссельной заслонки TB от Jenvey. Они будут крепиться непосредственно вместо DCOE или DHLA аналогичного стиля. Если у вас есть IDA или IDF Webers, то корпуса TF совместимы с фланцами. Если ваш двигатель еще не оснащен карбюраторами с двойной боковой/нижней тягой, вы должны сделать соответствующий выбор двойных или одинарных дроссельных заслонок с соответствующим коллектором и воздушными рожками/фильтрами. Я добился некоторого успеха, сделав задние пластины для двойного фильтра ITG на конце набора воздушных рожков, прикрепленных либо к двойному, либо к одиночному корпусу дроссельной заслонки, это делает хорошую аккуратную установку. Если вы используете детали, оставшиеся от установки карбюратора, вы можете повторно использовать фильтры и задние пластины. Если вы не можете приобрести подходящий коллектор для вашего двигателя, его можно изготовить.
Если вы модернизируете систему на основе воздухозаборника, вы можете обнаружить, что можете повторно использовать топливную рампу, форсунки, регулятор давления и датчик положения дроссельной заслонки, это сэкономит деньги и усугубит ситуацию. Может потребоваться некоторая изобретательность при изготовлении кронштейнов для крепления OEM-компонентов к новым корпусам дроссельной заслонки, но это несложная задача.
При покупке корпуса дроссельной заслонки необходимо также приобрести тягу дроссельной заслонки, поскольку тип, используемый на карбюраторах с двойной боковой тягой, не подходит и не может использоваться. Как правило, комплекты корпуса дроссельной заслонки поставляются в комплекте с топливными рампами, предназначенными для установки стандартных форсунок Bosch.
Пневматические рожки, как правило, необходимы, и основным определяющим фактором длины является свободное пространство на стороне впуска двигателя, тщательно измерьте здесь, чтобы убедиться, что то, что вы покупаете, подойдет.
Потенциометр дроссельной заслонки обычно устанавливается на конце шпинделя на одном из корпусов дроссельной заслонки, убедитесь, что он установлен таким образом, что он открывается, а не закрывается, например. против натяжения пружины.
Прокладка трубопровода.
После прокладки топливопровода как можно ближе к концу топливной рампы прокладка трубопровода является простой задачей. болты на рельсе и соединение, как и раньше. При установке новой рампы важно убедиться, что форсунки правильно закреплены на рампе и что установленная рейка надежно удерживает форсунки в их положении во впускном коллекторе или в карманах корпуса дроссельной заслонки. Подача топлива должна быть подключена к одному концу топливной рампы, а регулятор давления — к другому; выход регулятора давления затем соединяется с возвратной трубой топливного бака. Обратная трубка должна сбрасывать топливо как можно ближе к выпускному отверстию насоса в баке.
Электропроводка.
Как правило, необходимо подключить только топливный насос, для которого требуется питание с предохранителем, которое включается зажиганием, потенциометр дроссельной заслонки, который подключен к EMS, датчики температуры охлаждающей жидкости и воздуха, которые снова подключены к EMS, и сами форсунки. Найти место для датчика температуры охлаждающей жидкости не всегда легко, но часто можно просверлить и выстучать существующую втулку где-нибудь на двигателе, которая должна быть тогда со стороны двигателя термостата, предпочтительно в головке. Датчик температуры воздуха должен быть установлен как можно ближе к впускным патрубкам.
В зависимости от типа впрыска, пакетного, сгруппированного или последовательного, форсунки могут быть подключены параллельно или последовательно, следуйте инструкциям, прилагаемым к EMS, чтобы убедиться, что вы делаете это правильно. Если вам нужны разъемы с защелками для форсунок, вам потребуется поездка на свалку, убедитесь, что у вас достаточно проводов с разъемами, и пока вы там, найдите разъемы, которые также крепятся к датчику температуры охлаждающей жидкости.
Рекомендуется прикрутить корпуса дроссельных заслонок к фиктивному коллектору (подойдет кусок углового железа, просверленный соответствующим образом с несколькими правильно расположенными отверстиями), чтобы сделать форсунку вытянутой, а также установить и адаптировать тягу дроссельной заслонки и другие вспомогательные устройства. . Делать это, когда кузова не прикреплены к автомобилю, намного удобнее, так как это делает настройку более доступной. Любые возникающие проблемы решаются гораздо проще.
В зависимости от сопротивления некоторым форсункам потребуется резистор, включенный последовательно, чтобы система EMS сработала правильно, убедитесь, что он правильно установлен и подключен.
Когда все это установлено удовлетворительно, все, что остается, это включить насос и убедиться, что топливо циркулирует перед началом процесса картирования.
Контуры карты поверхности для впрыска/зажигания.
Ниже приведен пример карты зажигания и впрыска из моей EMS, представленной в виде контуров поверхности при визуализации
таким образом становится намного понятнее, что происходит.
Обратите внимание на относительно большое опережение на холостом ходу, которое используется для обеспечения устойчивого холостого хода, и падение синхронизации после положения холостого хода, которое заставляет двигатель опускаться назад, если холостой ход становится слишком быстрым. Обратите также внимание на дополнительное опережение при частичном открытии дроссельной заслонки во всем диапазоне и небольшой провал в тайминге при 3500 об/мин, где, хотя обороты выше, тайминг меньше, чем при 2500 и 3000 об/мин. крутящий момент находится на двигателе из карты впрыска, большая выпуклость на топливной карте находится при 6500 об / мин, это место, где наполнение цилиндра лучше всего и, следовательно, является точкой максимальной подачи топлива и максимального крутящего момента.