Роботизированная коробка переключения передач — устройство и принцип работы РКПП
Любой современный автомобиль не сможет завестись и плавно тронуться с места, если в его устройстве не будет трансмиссии. На сегодняшний день существует большое разнообразие всевозможных коробок передач, которые не только позволяют водителю подобрать вариант, соответствующий его материальным возможностям, но и дают возможность получить максимальный комфорт от управления транспортным средством.
Коротко об основных разновидностях трансмиссии рассказывается в отдельном обзоре. Сейчас более подробно поговорим о том, что такое роботизированная коробка передач, ее основных отличиях от механической кпп, а также рассмотрим принцип работы этого агрегата.
Что такое роботизированная коробка передач
Работа ркпп практически идентична механическому аналогу за исключением некоторых особенностей. В устройство робота входят многие детали, из которых состоит уже привычный для всех механический вариант коробки. Основное отличие роботизированной в том, что ее управление имеет микропроцессорный тип. В таких коробках переключение передач выполняет электроника на основании данных от датчиков двигателя, педали газа и колес.
Основное отличие роботизированной в том, что ее управление имеет микропроцессорный тип. В таких коробках переключение передач выполняет электроника на основании данных от датчиков двигателя, педали газа и колес.
Роботизированная коробка также может называться автомат, однако это некорректное название. Дело в том, что часто акпп используется как обобщающее понятие. Так, тот же вариатор имеет автоматический режим переключения передаточных чисел, поэтому для некоторых это тоже автомат. На самом деле робот по строению и принципу работы ближе к механической коробке.
Внешне отличить ркпп от акпп невозможно, потому что они могут иметь идентичный селектор и корпус. Проверить трансмиссию можно только во время езды транспорта. Каждый тип агрегатов имеет свои особенности работы.
Основное назначение роботизированной трансмиссии – максимально облегчить управление автомобилем. Водителю не нужно самостоятельно переключать скорости – эту работу выполняет блок управления. Помимо комфорта, производители автоматических трансмиссий стремятся сделать свою продукцию дешевле. На сегодняшний день робот – самая бюджетная разновидность кпп после механики, но она не предоставляет такого комфорта от вождения, как вариатор или автомат.
На сегодняшний день робот – самая бюджетная разновидность кпп после механики, но она не предоставляет такого комфорта от вождения, как вариатор или автомат.
Принцип роботизированной коробки передач
Роботизированная трансмиссия может переключаться на очередную скорость либо автоматически, либо полуавтоматически. В первом случае микропроцессорный блок получает сигналы от датчиков, на основании чего срабатывает запрограммированный производителем алгоритм.
Большинство ркпп оснащены селектором с ручным режимом. В этом случае скорости все равно будут включаться автоматически. Единственно – водитель может самостоятельно подавать сигнал момента включения повышенной или пониженной передачи. Похожий принцип имеют некоторые автоматические коробки типа Tiptronic.
Чтобы повысить или понизить скорость, водитель перемещает рычаг селектора в сторону + или в сторону -. Благодаря такой опции некоторые называют подобную трансмиссию секвентальной или последовательной.
Работает роботизированная коробка по следующей схеме:
- Водитель нажимает тормоз, заводит двигатель и переводит рычаг переключения режимов движения в положение D;
- Сигнал от узла поступает на блок управления коробки;
- В зависимости от выбранного режима БУ активирует соответствующий алгоритм, по которому будет работать агрегат;
- В процессе движения датчики подают сигналы в «мозги робота» о том, какая скорость у транспортного средства, о нагрузке силового агрегата, а также о текущем режиме кпп;
- Как только показатели перестают соответствовать программе, установленной с завода, блок управления подает команду перейти на другую передачу.
 Это может быть как повышение, так и понижение скорости.
Это может быть как повышение, так и понижение скорости.
 Это может быть как повышение, так и понижение скорости.
Это может быть как повышение, так и понижение скорости.Когда водитель ведет машину с механикой, он должен чувствовать свой транспорт, чтобы определить момент, когда нужно переключиться на другую скорость. В роботизированном аналоге проходит аналогичный процесс, только водителю не нужно задумываться над тем, когда перемещать рычаг переключения в нужное положение. Вместо него это делает микропроцессор.
Система отслеживает всю информацию, поступающую от всех датчиков, и выбирает оптимальную передачу для конкретной нагрузки. Чтобы электроника смогла переключать скорости, трансмиссия имеет гидромеханический актуатор. В более распространенном исполнении вместо гидромеханики устанавливается электрический привод или сервопривод, который соединяет/разъединяет сцепление в коробке (кстати, в этом есть некоторое сходство с автоматом – сцепление расположено не там, где оно находится в мкпп, а именно возле маховика, а в самом корпусе трансмиссии).
Когда блок управления подает сигнал о том, что пора переключаться на другую скорость, срабатывает сначала первый электрический (или гидромеханический) сервопривод. Он отсоединяет фрикционные поверхности сцепления. После этого второй сервопривод перемещает шестерни в механизме в нужное положение. Далее первый медленно отпускает сцепление. Такая конструкция позволяет механизму работать без участия водителя, поэтому машина с роботизированной трансмиссией не имеет педаль сцепления.
Он отсоединяет фрикционные поверхности сцепления. После этого второй сервопривод перемещает шестерни в механизме в нужное положение. Далее первый медленно отпускает сцепление. Такая конструкция позволяет механизму работать без участия водителя, поэтому машина с роботизированной трансмиссией не имеет педаль сцепления.
Многие коробки на селекторе имеют позиции принудительного переключения скоростей. Этот так называемый типтроник позволяет водителю самостоятельно управлять моментом переключения на повышенную или пониженную скорость.
Устройство роботизированной коробки передач
На сегодняшний день существует несколько разновидностей роботизированных трансмиссий для легковых авто. Они могут отличаться друг от друга некоторыми исполнительными элементами, однако основные части остаются идентичными.
Вот какие узлы входят в ркпп:
- Сцепление. В зависимости от производителя и модификации агрегата это может быть одна деталь с фрикционной поверхностью или же несколько аналогичных дисков. Чаще всего эти элементы расположены в охлаждающей жидкости, которая стабилизирует работу узла, предотвращая его перегрев. Более эффективной считается преселективный вариант или двойной. В такой модификации пока включена одна передача, второй комплект готовится включить следующую скорость.
- Основная часть представляет обычную механическую коробку. Каждый производитель использует разные собственные разработки. Например, робот от бренда Mercedes (Speedshift) внутренне представляет собой автоматическую коробку 7G-Tronic. Единственное отличие агрегатов в том, что вместо гидротрансформатора используется сцепление с несколькими фрикционными дисками. Похожий подход имеет концерн BMW. Его коробка SMG создана на базе механической коробки с шестью ступенями.
- Привод на сцепление и передачи. Существует два варианта – с электроприводом или гидромеханическим аналогом. В первом случае сцепление выжимается электромотором, а во втором – гидроцилиндрами с ЭМ клапанами. Электропривод работает медленней, чем гидравлика, зато он не требует поддержки постоянного давления в магистрали, от которого работает электрогидравлический тип. Гидравлический же робот переходит на следующую ступень намного быстрее (0,05 секунды против 0,5 сек. у электрического аналога). Электрическая ркпп в основном устанавливается на бюджетные машины, а гидромеханическая – на премиальные спорткары, так как в них крайне важна скорость переключения передач без прерывания подачи мощности на ведущий вал.
- Датчик. Таких деталей в роботе большое количество. Они отслеживают множество разных параметров трансмиссии, например, положение вилок, обороты входящего и выходящего валов, в каком положении зафиксирован переключатель селектора, температуру охлаждающей жидкости и т.д. Вся эта информация подается на устройство управления механизмами.
- ЭБУ – микропроцессорный блок, в который запрограммированы разные алгоритмы при разных показателях, поступающих от сенсоров. Этот блок связан с основным блоком управления (оттуда поступают данные о работе двигателя), а также с электронными системами блокировки колес (ABS или ESP).
- Исполнительные механизмы – гидроцилиндры или электродвигатели в зависимости от модификации коробки.
 Чаще всего эти элементы расположены в охлаждающей жидкости, которая стабилизирует работу узла, предотвращая его перегрев. Более эффективной считается преселективный вариант или двойной. В такой модификации пока включена одна передача, второй комплект готовится включить следующую скорость.
Чаще всего эти элементы расположены в охлаждающей жидкости, которая стабилизирует работу узла, предотвращая его перегрев. Более эффективной считается преселективный вариант или двойной. В такой модификации пока включена одна передача, второй комплект готовится включить следующую скорость. Гидравлический же робот переходит на следующую ступень намного быстрее (0,05 секунды против 0,5 сек. у электрического аналога). Электрическая ркпп в основном устанавливается на бюджетные машины, а гидромеханическая – на премиальные спорткары, так как в них крайне важна скорость переключения передач без прерывания подачи мощности на ведущий вал.
Гидравлический же робот переходит на следующую ступень намного быстрее (0,05 секунды против 0,5 сек. у электрического аналога). Электрическая ркпп в основном устанавливается на бюджетные машины, а гидромеханическая – на премиальные спорткары, так как в них крайне важна скорость переключения передач без прерывания подачи мощности на ведущий вал.
Специфика работы РКПП
Чтобы трогание автомобиля происходило плавно, водитель должен правильно пользоваться педалью сцепления. После того, как он включил первую или заднюю передачу, ему необходимо плавно отпускать педаль. Как только водитель прочувствует зацепление дисков, по мере отпускания педали он может добавлять оборотов двигателю, чтобы машина не заглохла. Так работает механика.
Идентичный процесс происходит и в роботизированном аналоге. Только в этом случае от водителя не требуется большого умения. Ему нужно только перевести переключатель коробки в соответствующее положение. Автомобиль начнет трогаться в соответствии с настройками блока управления.
Самая простая модификация с одним сцеплением работает так же, как классическая механика. Однако при этом наблюдается присутствие одной проблемы – электроника не фиксирует отзыв от сцепления. Если человек способен определить, насколько плавно нужно отпускать педаль в конкретном случае, то автоматика работает более жестко, поэтому ход автомобиля сопровождается ощутимыми рывками.
Особенно это ощущается в модификациях с электроприводом исполнительных механизмов – пока переключается передача, сцепление будет находиться в разомкнутом состоянии. Это будет означать разрыв потока крутящего момента, из-за чего авто начинает замедляться. Так как скорость вращения колес уже меньше соответствует включенной передачи, происходит небольшой рывок.
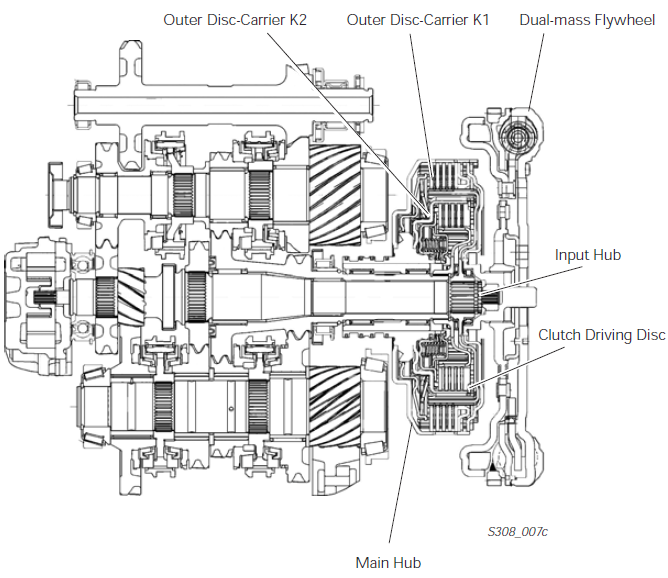
Инновационным решением такой проблемы стала разработка модификации с двойным сцеплением. Яркий представитель такой трансмиссии – DSG от Volkswagen. Рассмотрим подробней о ее особенностях.
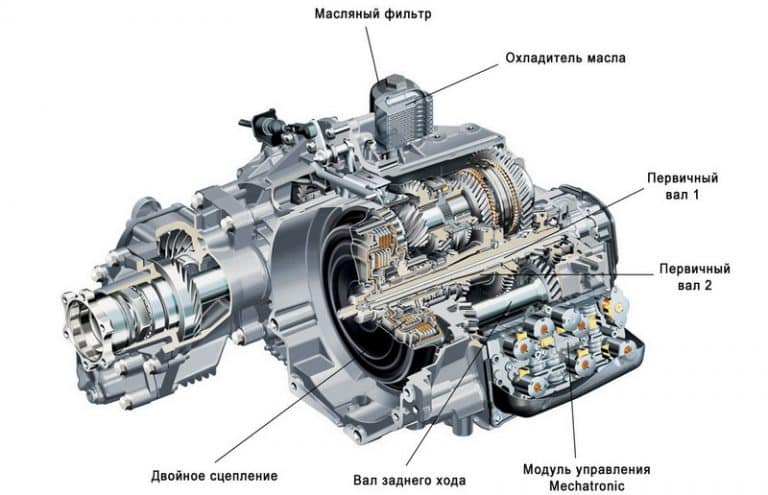
Особенности роботизированной коробки передач DSG
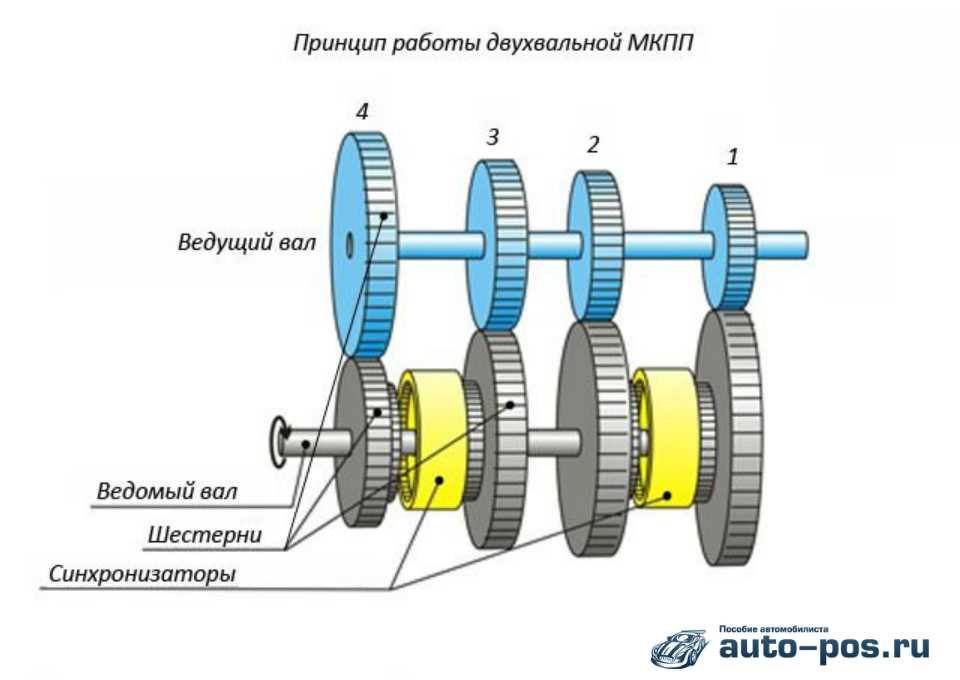
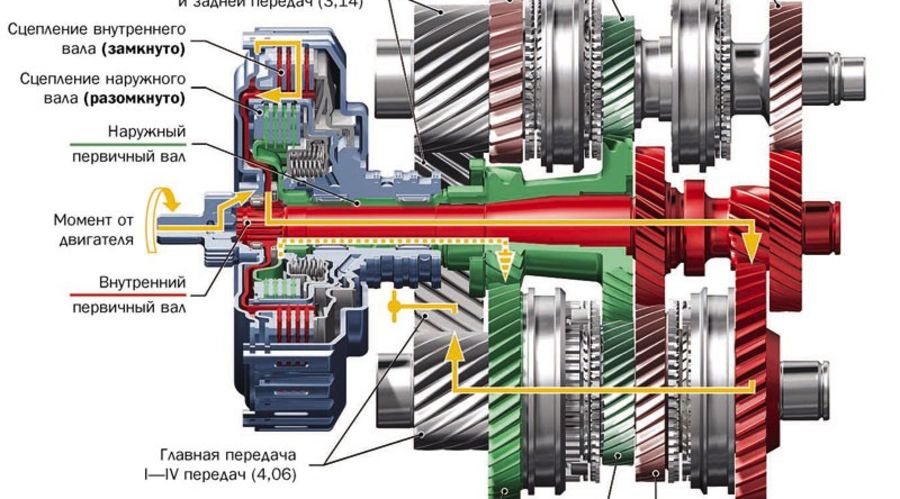
Расшифровка этой аббревиатуры – direct shift gearbox. По сути, это две механические коробки, установленные в один корпус, но имеющие одно место подключения к ходовой части машины. Каждый механизм имеет свое сцепление.
Основная особенность такой модификации – преселективный режим. То есть, пока работает первый вал с включенной передачей, электроника уже подсоединяет соответствующие шестерни (при разгоне на повышение передачи, при замедлении – на понижение) второго вала. Главному исполнительному устройству остается только отсоединить одно сцепление и подсоединить другое. Как только от блока управления поступит сигнал на переход к другой ступени, работающее сцепление размыкается, и сразу подсоединяется второе с уже зацепленными шестернями.
Главному исполнительному устройству остается только отсоединить одно сцепление и подсоединить другое. Как только от блока управления поступит сигнал на переход к другой ступени, работающее сцепление размыкается, и сразу подсоединяется второе с уже зацепленными шестернями.
Такая разработка позволяет ездить без сильных рывков при разгоне. Первая разработка преселективной модификации появилась в 80-х годах прошлого столетия. Правда, тогда роботы с двойным сцеплением устанавливались на раллийные и гоночные автомобили, в которых имеет большое значение скорость и точность момента переключения передач.
Если сравнивать коробку DSG с классическим автоматом, то у первого варианта больше преимуществ. Во-первых, благодаря более привычному строению основных элементов (за основу производитель может взять любой уже готовый механический аналог), в продаже такая коробка будет стоить дешевле. Тот же фактор влияет на обслуживание агрегата – механика более надежна, и легче ремонтируется.
Это дало возможность производителю устанавливать инновационную трансмиссию на бюджетные модели своей продукции. Во-вторых, многие владельцы транспорта с такой коробкой передач отмечают повышение экономичности автомобиля по сравнению с идентичной моделью, но с другой коробкой.
Во-вторых, многие владельцы транспорта с такой коробкой передач отмечают повышение экономичности автомобиля по сравнению с идентичной моделью, но с другой коробкой.
Инженерами концерна VAG было разработано два варианта трансмиссии дсг. Одна из них имеет маркировку 6, а другая – 7, что соответствует количеству ступеней в коробке. Также в шестиступенчатом автомате используется мокрое сцепление, а в семиступенчатом аналоге – сухое. Более подробно о плюсах и минусах дсг коробки, а также о том, чем еще модель dsg 6 отличается от седьмой модификации, рассказывается в отдельной статье.
Преимущества и недостатки
Рассматриваемый тип трансмиссии имеет как положительные, так и отрицательные стороны. К достоинствам коробки можно отнести:
- Такую трансмиссию можно использовать в паре с силовым агрегатом практически любой мощности;
- По сравнению с вариатором и автоматом роботизированный вариант стоит дешевле, хотя это и достаточно инновационная разработка;
- Роботы более надежны по сравнению с другими автоматическими трансмиссиями;
- Благодаря внутреннему сходству с механикой, легче найти специалиста, который возьмется за ремонт агрегата;
- Более эффективное переключение скоростей позволяет использовать мощность мотора без критичного повышения расхода горючего;
- За счет улучшения экономичности машина меньше выбрасывает вредных веществ в окружающую среду.

Несмотря на явные преимущества перед другими автоматическими коробками передач, робот имеет несколько существенных недостатков:
- Если автомобиль оснащается однодисковым роботом, то поездку на таком транспорте комфортной никак нельзя назвать. При переключении скоростей будут присутствовать ощутимые рывки, как будто водитель резко бросает педаль сцепления на механике.
- Чаще всего в агрегате выходит из строя сцепление (меньше плавности зацепления) и актуаторы. Это усложняет ремонт трансмиссии, так как они имеют небольшой рабочий ресурс (около 100 тысяч километров пробега). Редко когда сервоприводы можно отремонтировать, а новый механизм стоит дорого.
- Что касается сцепления, то ресурс дисков тоже очень маленький – приблизительно 60 тысяч. Причем приблизительно на половине ресурса нужно выполнять «подводку» коробки под состояние фрикционной поверхности деталей.
- Если говорить о преселективной модификации DSG, то она показала себя более надежной за счет меньшего времени на переключение скоростей (благодаря этому машина не так сильно замедляется). Несмотря на это, сцепление все равно в них страдает.
 Несмотря на это, сцепление все равно в них страдает.
Несмотря на это, сцепление все равно в них страдает.Учитывая перечисленные факторы, можно сделать заключение: что касается надежности и рабочего ресурса механике пока нет равных. Если делается упор на максимальный комфорт, тогда лучше выбрать вариатор (в чем его особенность, читайте здесь). При этом стоит учесть, что такая трансмиссия не даст возможность сэкономить топливо.
В завершение предлагаем небольшое видеосравнение основных типов трансмиссий – их плюсы и минусы:
Как выбрать автомобиль, какая коробка лучше: автомат, вариатор, робот, механика
Смотрите это видео на YouTube
Вопросы и ответы:
В чем разница между автоматом и роботом? Автоматическая трансмиссия работает за счет гидротрансформатора (нет жесткой сцепки с маховиком через сцепление), а робот – аналог механики, только скорости переключаются автоматически.
Как переключать передачи на коробке робот? Принцип езды на роботе идентичен езде на автомате: выбирается нужный режим на селекторе, и регулируются обороты мотора педалью газа.
Сколько педаль в машине с роботом? Хотя робот конструктивно похож на механику, сцепление отключается от маховика автоматически, поэтому в машине с роботизированной трансмиссией две педали (газ и тормоз).
Как правильно парковать автомобиль с коробкой робот? Европейскую модель ставить на парковку нужно в режиме А или на задней передаче. Если машина американская, то на селекторе есть режим Р.
 Скорости будут переключаться самостоятельно.
Скорости будут переключаться самостоятельно.Главная » Статьи » Устройство автомобиля » РКПП – роботизированная коробка переключения передач
Обслуживание РКПП
РКПП – роботизированная коробка переключения передач. Роботизированная коробка передач представляет собой обычную механическую трансмиссию, переключением передач в которой управляет робот – набор электронных блоков и датчиков.
Принцип работы РКПП ничем не отличается от принципа работы МКПП. Также она имеет аналогичную конструкцию, за исключением наличия в «роботе» специальных сервоприводов, которые называют актуаторами. Именно они позволяют автоматизировать смыкание сцепления и выбор конкретной передачи.
Именно они позволяют автоматизировать смыкание сцепления и выбор конкретной передачи.
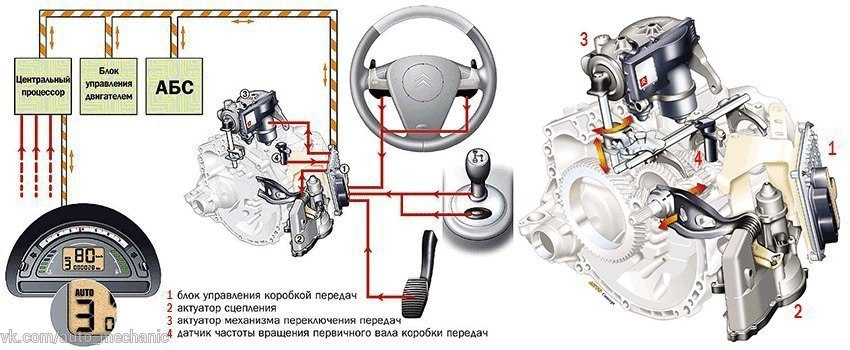
Электронный блок управления (ЭБУ) обрабатывает сигналы датчиков и других систем автомобиля: блока управления двигателем, тормозной и антизаносной/противопробуксовочной систем и т.д. — и приводит в действие актуаторы включения сцепления и переключения передач.
Плюсы роботизированной коробки передач:
• бюджетный вариант АКПП;
• сохранена надежность и конструктивность МКПП;
• минимизированы трудозатраты водителя для переключения передач;
• высокий процент передачи КПД в крутящем моменте.
Коробка робот изнашивает сцепление быстрее, чем водитель на механике. Примерно через 30 — 50 тыс.км пробега сцепление на автомобилях, оснащенных коробкой роботом, начинает проявлять признаки неисправности: коробка робот «буксует», появляется шум, не включается передача, автомобиль не едет как прежде.
Поэтому, необходимо провести техническое обслуживание при первых проявлениях неисправностей.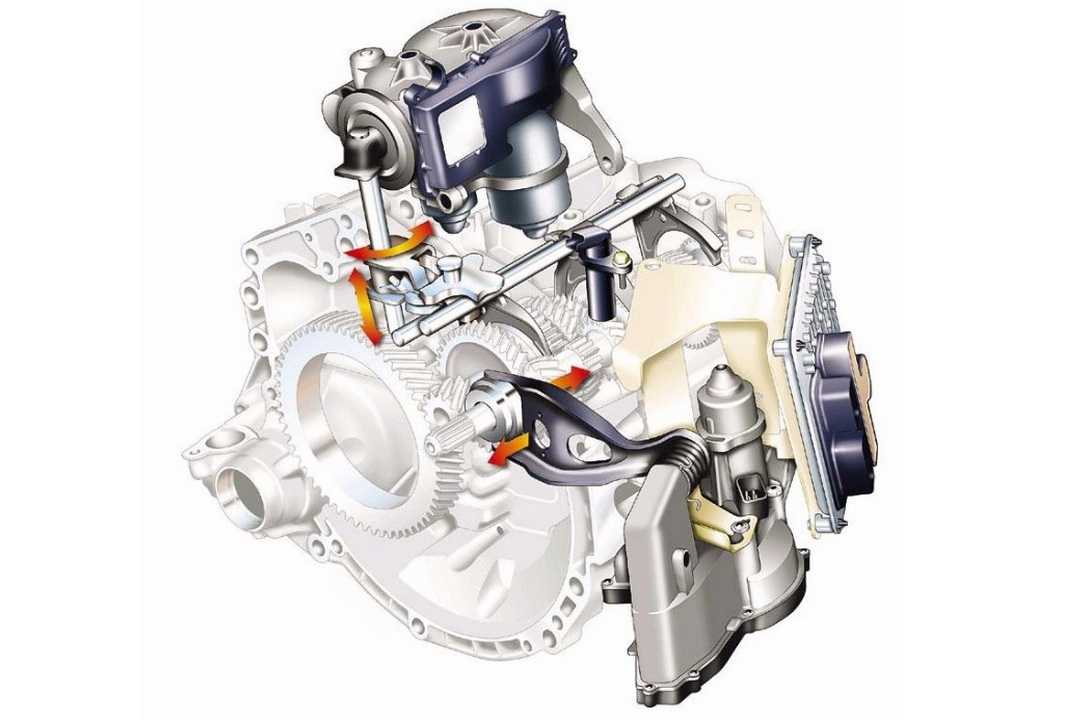 При проведении технического обслуживания роботизированной коробки с помощью специализированного оборудования после тщательной диагностики производится программная адаптация сцепления и адаптация приводов роботизированной КПП. Иногда для восстановления работоспособности коробки робота достаточно выполнить прокачку сцепления и адаптацию сцепления (обучение момента трогания).
При проведении технического обслуживания роботизированной коробки с помощью специализированного оборудования после тщательной диагностики производится программная адаптация сцепления и адаптация приводов роботизированной КПП. Иногда для восстановления работоспособности коробки робота достаточно выполнить прокачку сцепления и адаптацию сцепления (обучение момента трогания).
Своевременное обслуживание робота позволяет продлить срок службы комплекта сцепления РКПП, обеспечив пробег 60-70 тыс.км и более. Чтобы роботизированная КПП служила долго, необходимо при техническом обслуживании через каждые 10-15 тыс.км проводить адаптацию алгоритма работы робота к степени износа диска сцепления.
Ремонт и техническое обслуживание роботизированной коробки очень похож на ремонт МКПП. Если вам необходима замена сцепления на роботе — специалисты СТО «Элекар» быстро и качественно проведут ремонт коробки передач вашего автомобиля.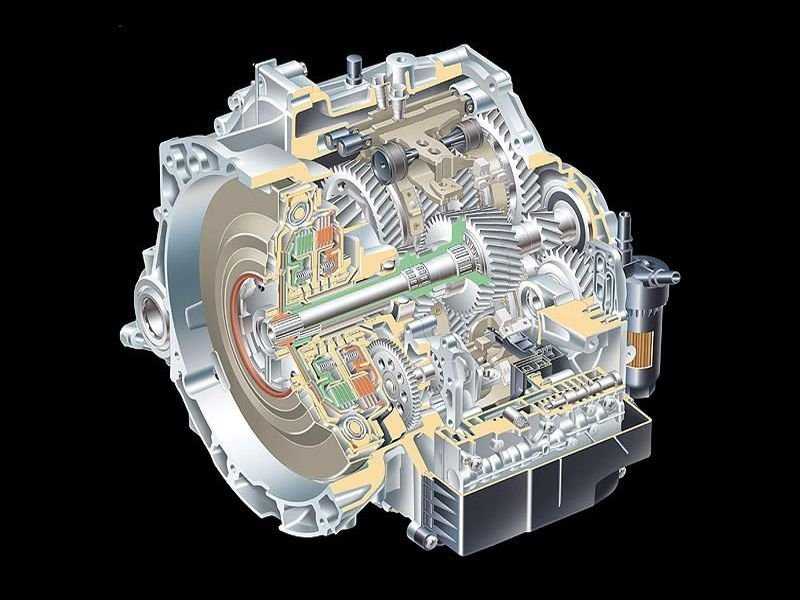
У нас есть весь комплекс инструментов, необходимых для технического обслуживания роботизированной КПП.
Быстро и качественно произвести диагностику и ремонт роботизированной коробки, техническое обслуживание РКПП в Витебске можно в автосервисе «Элекар». На все работы дается гарантия с предоставлением всех необходимых документов.
Слово робот происходит от Чешское слово для принудительного труда или крепостного. Он был представлен драматурга Карела Чапека, чей вымышленный робот изобретения были созданы химическими и биологическими, а не механические методы. В основном роботы состоит из:
Механическая конструкция Конструкция робота состоит в основном из корпус робота, включающий в себя руки и колеса. Некоторая сила например, электричество требуется, чтобы сделать руки и колеса поворот по команде. Один из самых интересных аспектов робота в целом является его поведение, которое требует форма интеллекта.
Двигатели Разнообразие электродвигателей обеспечивает питание роботов, заставляя их двигаться с различными запрограммированные движения. КПД двигателя описывает, сколько электроэнергии потребляется преобразуется в механическую энергию.
Двигатели постоянного тока.
Двигатели переменного тока. Эти двигатели включают мощность на входах, чтобы непрерывно перемещать поле.
Шаговые двигатели. Они как бесщеточный двигатель постоянного или переменного тока. Они двигают ротор на прикладывая мощность к различным магнитам в двигателе в последовательность (ступенчатая). Шаговые двигатели предназначены для точное управление и будет не только вращаться по команде, но и может вращаться с любым числом шагов в секунду (вплоть до их максимальная скорость).
Серводвигатели. Сервоприводы простые постоянного тока
двигатели с редуктором и системой управления с обратной связью. Подробнее о двигателях
Механизмы Шестерни и цепи . Шестерни и цепи представляют собой механические детали, обеспечивающие механизм для передачи вращательного движения из одного места в другое с возможно менять по ходу. Изменение скорости между двумя шестернями зависит от количества зубьев на каждая передача. Шкивы и ремни. Шкивы и ремни, две другие простые машины используемые в роботах, работают так же, как шестерни и цепи. Шкивы представляют собой колеса с канавкой по краю, а ремни — это резиновые петли, которые входят в эту канавку. Коробки передач . Коробка передач работает по тому же принципу, что и коробка передач. Датчики Роботы работают по принципу измерения, требующие различных видов датчиков. А чувство времени обычно встроено через перцептивные аппаратное и программное обеспечение, которое быстро обновляется. Датчики взаимодействуют с внешней средой и преобразует энергию, связанную с происходящим измеряемые (звук, свет, давление, температура и т. в другую форму энергии. Обычные датчики, используемые в робототехника включает датчики света, сенсорные датчики, звуковые датчики и датчик ускорения. А датчик звука устанавливается на уровне уха робот для обнаружения голоса субъекта. Ан датчик ускорения установлен в кузове обнаруживать тряску. Сенсорный датчик установлен в лоб робота для обнаружения касания
Источник питания Как правило, питание обеспечивается
два типа источников: батареи, которые используются только один раз
а затем выбрасывается; и аккумуляторные батареи, которые
работают в результате обратимой химической реакции и могут быть
перезаряжался тысячу раз. Система управления Существуют две основные системы управления роботы: логическая схема и микроконтроллер. Логическая схема Цифровая логическая схема управляет механическая система. Цепь обычно связана с механическая структура через мостовое реле . А сигнал управления создает магнитное поле в реле катушка, которая механически замыкает выключатель. транзисторы, для например, хорошие кремниевые переключатели, доступные во многих технологии управления механическими системами. Микроконтроллер Микроконтроллеры умны
электронные устройства, используемые внутри роботов. Они
выполнять функции, аналогичные тем, которые выполняет
микропроцессор (ЦП) внутри персонального компьютера. Существуют три основные характеристики микроконтроллер для рассмотрения: скорость, размер и Память. Скорость обозначается в тактах, а обычно измеряется в миллионах циклов в секунду (Мегагерц, МГц). Размер определяет количество биты информации, которые микроконтроллер может обрабатывать в один шаг (например, 4-, 8-, 16- и 32-битные). Микроконтроллеры насчитывают большую часть своих постоянная память (ПЗУ) в тысячах байт (КБ) и r и памяти доступа (БАРАН) в одиночных байтах. Подключение к математике Конфигурация робота
|

 Постоянный магнит постоянного тока
двигатели требуют только двух проводов и используют расположение
неподвижные и электромагниты (статор и ротор) и
переключатели. Они образуют коммутатор для создания движения
через вращающееся магнитное поле.
Постоянный магнит постоянного тока
двигатели требуют только двух проводов и используют расположение
неподвижные и электромагниты (статор и ротор) и
переключатели. Они образуют коммутатор для создания движения
через вращающееся магнитное поле. Они
настроить себя, пока они не совпадают с сигналом. Сервоприводы
используются в радиоуправляемых самолетах и автомобилях.
Они
настроить себя, пока они не совпадают с сигналом. Сервоприводы
используются в радиоуправляемых самолетах и автомобилях.
 Первое использование
аккумуляторная батарея обеспечивает до 4 часов непрерывной работы
работа в приложении.
Первое использование
аккумуляторная батарея обеспечивает до 4 часов непрерывной работы
работа в приложении..jpg) Микроконтроллеры медленнее и имеют меньше памяти, чем
ЦП, но предназначены для решения реальных задач управления.
Одно из основных различий между ЦП и
микроконтроллеры — количество внешних компонентов
необходимо для их эксплуатации. Микроконтроллеры могут работать без
внешние детали, и обычно требуется только внешний
кристалл или осциллятор.
Микроконтроллеры медленнее и имеют меньше памяти, чем
ЦП, но предназначены для решения реальных задач управления.
Одно из основных различий между ЦП и
микроконтроллеры — количество внешних компонентов
необходимо для их эксплуатации. Микроконтроллеры могут работать без
внешние детали, и обычно требуется только внешний
кристалл или осциллятор.Подготовка к работе с роботами | Национальное географическое общество
1. Используйте велосипед, чтобы объяснить основы снаряжения.
Используйте велосипед, чтобы объяснить основы снаряжения.
Покажите предоставленную фотографию шестеренки или поднимите шестеренку, чтобы ее увидел класс. Спросите: Кто-нибудь может сказать мне, что это такое и для чего оно служит? Объясните, что это шестерня, и шестерни используются для увеличения или уменьшения силы, увеличения или уменьшения скорости или для передачи или изменения направления движения.
Спросите: Кто-нибудь может сказать, к чему подключаются педали на обычном велосипеде? Объясните, что педали обычно соединены с самой большой шестерней ближе к передней части. Покажите изображение велосипеда. Спросите: Что соединяет эту большую шестерню с другой шестерней на велосипеде? (Шестерни соединены цепью.) Скажите учащимся, что шестерни, соединенные цепью, передают мощность от педали к заднему колесу. Итак, когда человек крутит педали велосипеда, энергия, которую он или она прилагает, превращается в энергию, которая двигает велосипед вперед.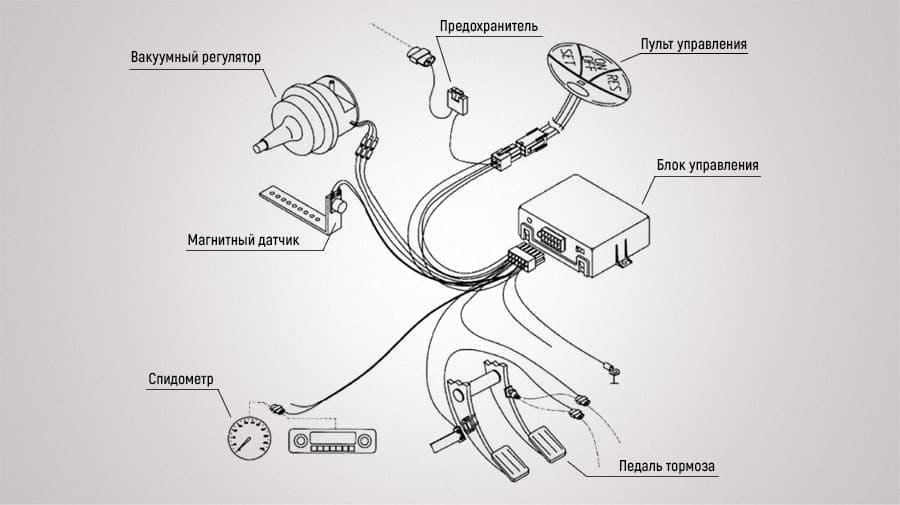
Спросите: Кто-нибудь крутил педали на велосипеде в гору? На ровной поверхности? Что легче? Что сложнее? Почему? Предложите учащимся обсудить свой опыт езды на велосипеде и объясните, что шестерни в велосипеде преобразуют энергию, которую они прилагают, в энергию, которая заставляет велосипед двигаться.
2. Примите участие в групповой демонстрации передач с использованием повседневных предметов.
Спросите : Почему шестерни имеют зубья? ( Шестерни имеют зубья для предотвращения проскальзывания.) Спросите : Если бы у шестерни не было зубьев, что бы это было?
(В большинстве случаев шестерня без зубьев будет колесом. Существуют относительно редкие версии шестерен без зубьев, но почти все шестерни имеют зубья.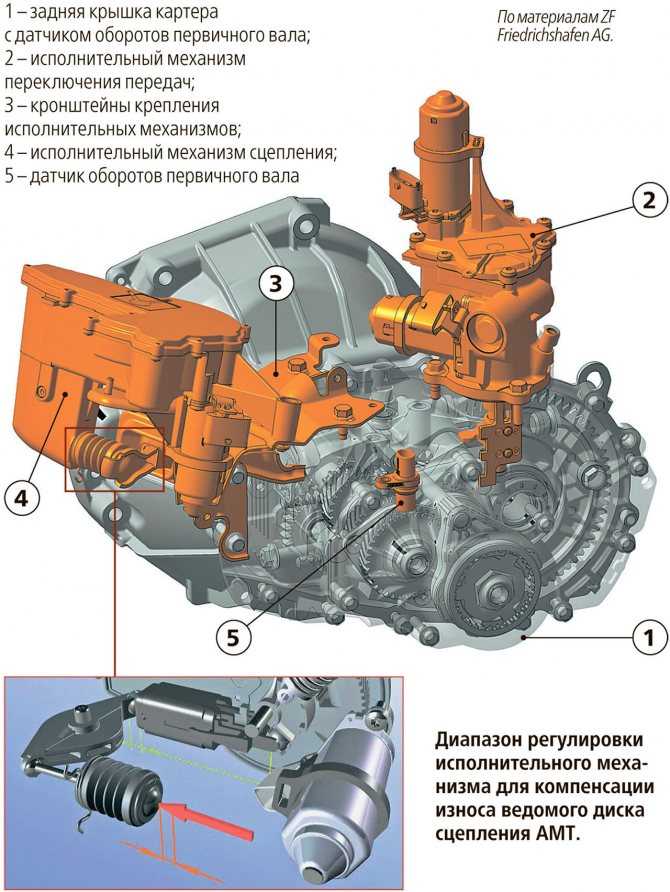 ) Скажите учащимся, что это означает, что мы можем экспериментировать с поведением шестерни, используя другие круглые или круглые объекты. Положите два теннисных мяча рядом на стол перед классом. Вызовите добровольца и попросите ученика положить руку на мяч справа, а кончик пальца на верхнюю часть мяча слева. Попросите ученика повернуть мяч справа по часовой стрелке, осторожно удерживая другой мяч на месте кончиком пальца. Это должно заставить шар слева вращаться против часовой стрелки. Попросите ученика описать, в каком направлении вращается каждый шарик.
) Скажите учащимся, что это означает, что мы можем экспериментировать с поведением шестерни, используя другие круглые или круглые объекты. Положите два теннисных мяча рядом на стол перед классом. Вызовите добровольца и попросите ученика положить руку на мяч справа, а кончик пальца на верхнюю часть мяча слева. Попросите ученика повернуть мяч справа по часовой стрелке, осторожно удерживая другой мяч на месте кончиком пальца. Это должно заставить шар слева вращаться против часовой стрелки. Попросите ученика описать, в каком направлении вращается каждый шарик.
Вызовите двух дополнительных добровольцев. Поместите третий теннисный мяч на прямую линию рядом с первыми двумя теннисными мячами. Попросите одного добровольца положить кончик пальца на средний шарик, чтобы удерживать его на месте, в то время как два других добровольца поворачивают внешние шарики по часовой стрелке. Предложите учащимся описать, в каком направлении вращается каждый шарик. Объясните учащимся, что две взаимосвязанные шестерни будут вращаться в противоположных направлениях.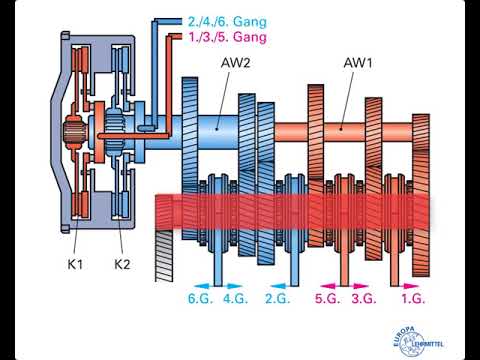
Попросите нового волонтера. Подарите ему или ей баскетбольный и теннисный мяч. Попросите добровольца положить баскетбольный мяч справа от себя, а теннисный мяч слева и соединить мячи так, чтобы они соприкасались. Теперь попросите ученика положить руку на каждый мяч и повернуть баскетбольный мяч по часовой стрелке на четыре полных оборота, осторожно удерживая кончик пальца сверху теннисного мяча. Помогите посчитать обороты баскетбольного мяча, пока доброволец наблюдает за движением теннисного мяча. Попросите студента описать, что он или она наблюдали. Попросите студента повторить демонстрацию, на этот раз повернув теннисный мяч на четыре полных оборота и описав движение баскетбольного мяча.
Объясните учащимся, что, используя шестерни разных размеров, они могут изменять скорость (скорость) системы; это называется передаточным числом. Например, если у вас есть две шестерни (А и В) и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость). Если вы поменяете передачи, скорость (скорость) будет уменьшена. Итак, теннисный мяч вращается с другой скоростью, чем баскетбольный.
Например, если у вас есть две шестерни (А и В) и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость). Если вы поменяете передачи, скорость (скорость) будет уменьшена. Итак, теннисный мяч вращается с другой скоростью, чем баскетбольный.
3. Поэкспериментируйте с зубчатыми колесами и ремнями, используя катушки и перфорированную доску.
Разделите класс на рабочие группы по 2-4 человека в зависимости от количества имеющихся материалов. Раздайте каждой группе доску, десять колышков, восемь катушек (четыре маленьких и четыре больших), четыре резинки и раздаточный материал «Готовимся с роботами». Дайте им следующие инструкции или попросите студентов следовать вашей демонстрации. Задавайте вопросы, чтобы проверить понимание и прогресс учащихся. Предложите учащимся, у которых лучше развито зрение, прочитать шаги, представленные в раздаточном материале «Подготовка с помощью роботов», во время работы. Если учащимся нужна помощь, покажите фотогалерею «Готовимся вместе с роботами», пока они работают.
Если учащимся нужна помощь, покажите фотогалерею «Готовимся вместе с роботами», пока они работают.
4. Учащиеся используют доски и катушки для решения задач, связанных с шестернями.
Скажите учащимся, что теперь они будут работать в команде, чтобы решить ряд задач, в решении которых используются шестеренки. Скажите им, что они должны работать в команде, чтобы решить каждую из этих задач, используя свои доски, катушки и резиновые ленты. Выполните столько задач, сколько позволяет время, или дайте каждой группе отдельное задание для работы. После каждого задания помогите выполнить задание. Шаг 5.
- Задача 1. Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии; кроме того, необходимо изменить направление движения, чтобы робот двигался вперед, а не назад. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему?
- Задача 2: Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии, но направление движения не нужно менять. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему?
 Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему?
Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? - Задача 3: Робот должен двигаться быстрее, чем позволяет его источник энергии, и инженер готов пожертвовать мощностью ради скорости. Есть большая шестерня, маленькая шестерня и ремень для работы. Какая шестерня находится рядом с источником энергии для увеличения скорости?
- Задача 4. Роботу требуется больше энергии для перемещения по крутым склонам, и инженер готов пожертвовать скоростью. Есть большая шестерня, маленькая шестерня и ремень для работы. Какое снаряжение размещается рядом с источником энергии для получения мощности?
5. Попросите группы студентов поделиться своими решениями задач.
Попросите группы показать свои доски и объяснить свои решения. Обязательно предложите учащимся объяснить, почему они сделали то, что сделали. Примеры решений этих задач представлены в фотогалерее Gear Challenge Solutions.
Разрешить бесплатные эксперименты, если позволяет время.
Неформальное оценивание
В индивидуальном порядке учащиеся смогут продемонстрировать решения этих проблем с использованием шестерен, используя упражнение:
- Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии; кроме того, необходимо изменить направление движения, чтобы робот двигался вперед, а не назад. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? (Две шестерни, соединенные ремнем по схеме «восьмерка»)
- Роботу требуется мощность, передаваемая на его колеса от источника питания, расположенного на расстоянии, но направление движения не нужно менять. Есть шестеренки и ремень, с которым можно работать. Какая конфигурация поможет решить эту проблему? (Две шестерни соединены ремнем)
- Робот должен двигаться быстрее, чем позволяет его источник питания, и инженер готов пожертвовать мощностью ради скорости. Есть большая шестерня, маленькая шестерня и ремень для работы. Какая шестерня находится рядом с источником энергии для увеличения скорости? (Большая шестерня)
- Роботу требуется больше мощности для перемещения по крутым склонам, и инженер готов пожертвовать скоростью. Есть большая шестерня, маленькая шестерня и ремень для работы. Какое снаряжение размещается рядом с источником энергии для получения мощности? (Малый редуктор)
 Есть большая шестерня, маленькая шестерня и ремень для работы. Какая шестерня находится рядом с источником энергии для увеличения скорости? (Большая шестерня)
Есть большая шестерня, маленькая шестерня и ремень для работы. Какая шестерня находится рядом с источником энергии для увеличения скорости? (Большая шестерня)Примеры фотографий этих решений включены в фотогалерею Gear Challenge Solutions.
Расширение обучения
Предложите учащимся найти шестеренки в классе. Примером могут служить шестеренки в классных часах.
Предметы и дисциплины
- Физика
Цели обучения
Учащиеся:
- Понимать, что шестерни позволяют увеличивать или уменьшать скорость или силу
- Понимать, что шестерни позволяют менять направление движения
- Применить понимание зубчатых колес для решения простых задач
Подход к обучению
- Обучение для использования
Методы обучения
- Кинестетические/тактильные
Сводка навыков
Это задание нацелено на следующие навыки:
- Результаты студентов 21 века
- Обучение и инновационные навыки
- Критическое мышление и решение проблем
- Обучение и инновационные навыки
- Навыки критического мышления
- Анализ
- Применение
- Создание
- Оценка
- Вспоминая
- Понимание
- Научная и инженерная практика
- Анализ и интерпретация данных
- Задавать вопросы (для науки) и формулировать проблемы (для техники)
- Построение объяснений (для науки) и разработка решений (для инженерии)
- Разработка и использование моделей
- Участие в споре с доказательствами
- Получение, оценка и передача информации
- Планирование и проведение расследований
- Использование математики и вычислительного мышления
Связь с национальными стандартами, принципами и практиками
Национальные стандарты научного образования
- (5-8) Стандарт A-1: Способности, необходимые для проведения научных исследований
- (5-8) Стандарт А-2: Понимание научных исследований
- (5-8) Стандарт Б-2: Движения и силы
- (5-8) Стандарт Б-3: Передача энергии
- (5-8) Стандарт Е-1: Способности технологического проектирования
- (5-8) Стандарт Е-2: Понимание науки и техники
- (К-4) Стандарт А-1: Способности, необходимые для научного исследования
- (К-4) Стандарт А-2: Понимание научных исследований
- (К-4) Стандарт Б-2: Положение и движение объектов
- (К-4) Стандарт Е-1: Способности технологического проектирования
- (К-4) Стандарт Е-2: Понимание науки и техники
Научные стандарты нового поколения
- Инженерное проектирование:
3-5-ЭТС1-1. Определите простую задачу проектирования, отражающую потребность или желание, которая включает определенные критерии успеха и ограничения по материалам, времени или стоимости.
- Инженерный проект: МС-ЭТС1-1. Определить критерии и ограничения проблемы проектирования с достаточной точностью, чтобы гарантировать успешное решение, принимая во внимание соответствующие научные принципы и потенциальное воздействие на людей и природную среду, которое может ограничить возможные решения.
 Определите простую задачу проектирования, отражающую потребность или желание, которая включает определенные критерии успеха и ограничения по материалам, времени или стоимости.
Определите простую задачу проектирования, отражающую потребность или желание, которая включает определенные критерии успеха и ограничения по материалам, времени или стоимости.Что вам понадобится
Материалы, которые вы предоставите
- 10 штифтов на группу
- 1 Баскетбольный мяч
- 1 штифт на группу
- 3 теннисных мяча
- 4 резинки на группу
- 8 катушек, больших и малых, на группу
Требуемая технология
- Доступ в Интернет: Требуется
Физическое пространство
- Класс
Настройка
Обустройте класс так, чтобы всем было легко увидеть демонстрации.
Группировка
- Инструкция для большой группы
Исходная информация
Шестерни используются в машинах для изменения взаимосвязи между приводным механизмом машины (например, двигателем) и ее движущимися частями (например, рукой робота). Их можно найти в машинах, которые мы видим и используем каждый день, таких как часы, велосипеды и автомобили.
Шестерня представляет собой круглую деталь с канавками по периметру. Эти канавки образуют возвышения, называемые зубцами, с промежутком между каждым зубцом. Когда зубья двух или более шестерен подходят друг к другу, они работают вместе, чтобы влиять на крутящий момент (силу вращения) механической системы, либо увеличивая, либо уменьшая силу, или они будут влиять на направление движения. Две взаимосвязанные шестерни вращаются в противоположных направлениях, изменяя направление силы.
Диаметр шестерни играет важную роль в системе; с помощью шестерен разного размера можно изменять скорость (скорость) системы. Передаточное отношение – это сравнение количества зубьев в двух шестернях, которые работают вместе. Например, если у вас есть две шестерни (А и В), и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость) меньшей шестерни. Чтобы помочь учащимся визуализировать эту концепцию, покажите, как шестеренки за циферблатом часов поворачивают часовую и секундную стрелки. Передаточное отношение также можно определить, сравнив количество зубьев одной шестерни с количеством зубьев другой шестерни.
Передаточное отношение – это сравнение количества зубьев в двух шестернях, которые работают вместе. Например, если у вас есть две шестерни (А и В), и А в два раза больше В, то за один оборот А В будет вращаться вдвое, тем самым увеличивая скорость (скорость) меньшей шестерни. Чтобы помочь учащимся визуализировать эту концепцию, покажите, как шестеренки за циферблатом часов поворачивают часовую и секундную стрелки. Передаточное отношение также можно определить, сравнив количество зубьев одной шестерни с количеством зубьев другой шестерни.
Предыдущие знания
- Нет
Рекомендуемая предыдущая деятельность
- Нет
Словарь
шестерня
Существительное
зубчатое колесо, зубья которого входят в зацепление с зубьями другого колеса для передачи или приема силы и движения.
передаточное число
Существительное
отношение числа зубьев одной шестерни к числу зубьев другой шестерни.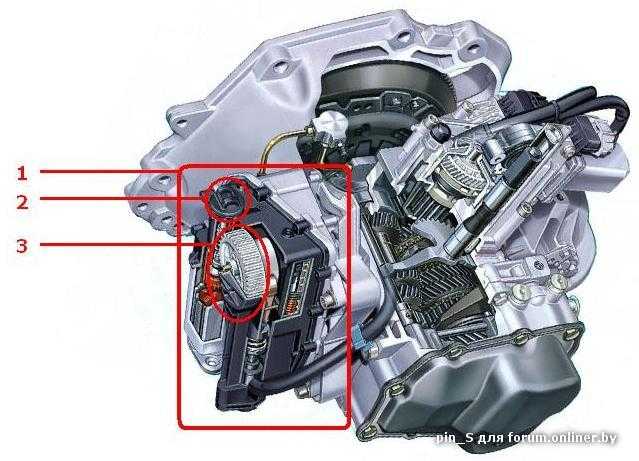
крутящий момент
Существительное
момент силы или системы сил, стремящихся вызвать вращение.
Статьи и профили
- Шестерни и шкивы
Интерактивы
- Техасский университет в Остине: AIM for Engineering, учебные материалы
Веб-сайты
- Брейн-поп: шестерни
Наконечники и модификации
МодификацияОбъясните младшим учащимся, что в задачах шестерни — это катушки, а ремни — резиновые ленты.
Наконечник Магнитные наборы шестерен, которые прилипают к белой или классной доске, или простые пластиковые наборы шестерен можно использовать для демонстрации передач вместо баскетбольных и теннисных мячей, если таковые имеются.