
Моторист.эксперт | Все о двигателях
Автомобиль стал неотъемлемой частью жизни современного человека. Но выбрать хорошее надежное авто порой непросто. Большинство вопросов у покупателя возникает по части двигателя. Перед покупкой следует узнать, какие характеристики и основные слабые места данного агрегата, какой у него реальный расход, как часто необходимо обслуживать.
В российских условиях эксплуатации не все силовые агрегаты зарекомендовали себя хорошо. Поэтому на нашем сайте вы найдете только честные обзоры, рейтинги, характеристики и эксплуатационные особенности моторов.
Хороший силовой агрегат – какие особенности учитывать?
При покупке новой или подержанной машины важно знать, какой ДВС стоит под капотом. Это может быть бензиновый мотор, дизельная установка или гибридный силовой агрегат. В последнее время популярность набирают электромоторы. У каждой модели двигателя есть свои проблемы и преимущества. Один мотор выносливый и может легко пройти 500 000 км без ремонта, второй предлагает низкий расход топлива, а третий не требователен к обслуживанию.
Важные стадии оценки агрегата под капотом авто следующие:
- узнать реальные технические характеристики, их соответствие заводским данным;
- получить информацию о потенциально слабых местах мотора, таких как узел ГРМ или головка блока;
- уточнить требования к обслуживанию, подтвержденные реальными отзывами владельцев машин;
- выбрать, какой двигатель стоит предпочесть на конкретной модели автомобиля при покупке в салоне;
- определиться с экономичностью, просчитав все затраты на топливо, расходные материалы и сервис.
Только после такой оценки особенностей мотора вы сможете смело заявить, что изучили агрегат и сделали выводы. К сожалению, сухие данные производителей в таблицах технических характеристик далеко не всегда отражают реальные особенности ДВС. Компании стремятся продать вам машину, поэтому умалчивают о проблемах и потенциальных поломках.
Почему удобно пользоваться нашим ресурсом?
На сайте представлены все реальные характеристики и особенности силовых агрегатов, включая эксплуатационные недостатки. Также мы публикуем собственные обзоры двигателей внутреннего сгорания, включая и моторы, которые уже сняты с производства. Преимущества такой информации следующие:
Также мы публикуем собственные обзоры двигателей внутреннего сгорания, включая и моторы, которые уже сняты с производства. Преимущества такой информации следующие:
- данные реальные, а не просто технические, вы получите практичную пользу;
- отзывы от реальных владельцев автомобилей, только достоверная информация;
- экспертные обзоры, из которых вы легко узнаете об особенностях моторов;
- заводские инструкции, требования к эксплуатации и обслуживанию ДВС;
- сравнение плюсов и минусов различных двигателей на одной модели авто.
Используя информацию на сайте, вы найдете ответ на все важные вопросы по силовым агрегатам. Если у вас остались вопросы по той или иной модели двигателя, просто задавайте их в комментариях к публикациям. Наша аудитория – эксперты автомобильного рынка. Они обязательно помогут вам узнать правду о конкретном моторе, дадут рекомендации и помогут решить возникшую дилемму. Доверяйте только проверенной и достоверной информации.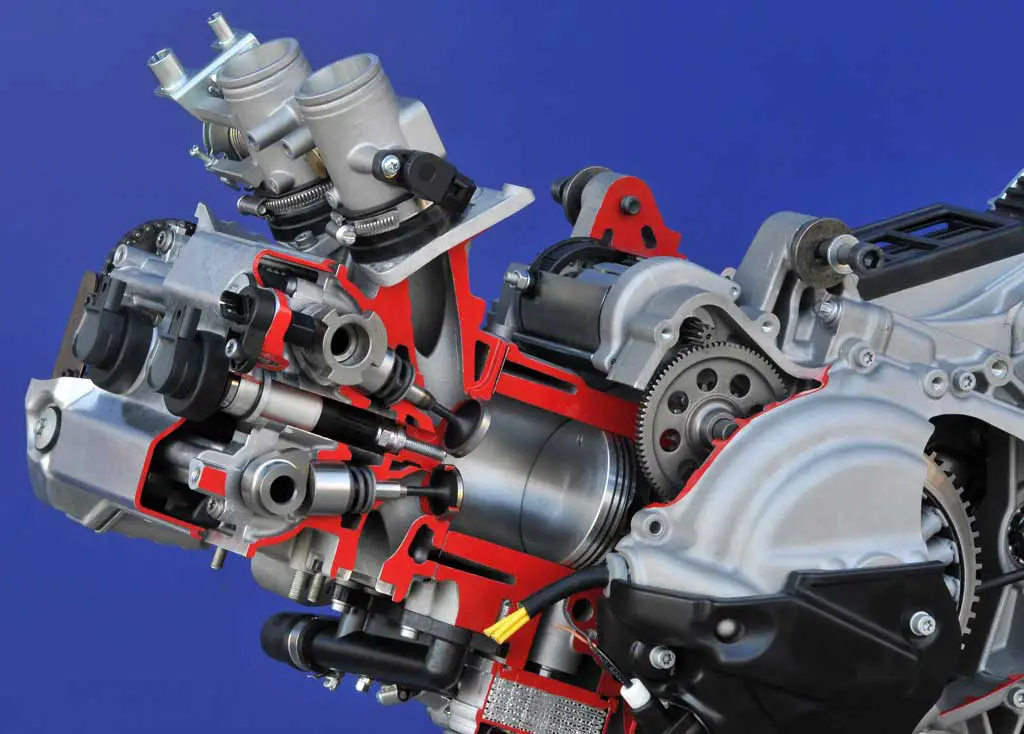
электродвигател- Все, что вам следует знать об электрических двигателях
Двигатели используются в широком спектре применений, таких как вентиляторы, электроинструменты, бытовая техника, электромобили и гибридные автомобили. Электродвигатель — это устройство, используемое для преобразования электроэнергии в механическую энергию, противоположную электрическому генератору. Существует множество вариантов и опций электродвигателей; например, двигатели постоянного тока – щеточные или бесщеточные, а двигатели переменного тока – асинхронные (или асинхронные) и синхронные. Двигатели могут работать при различных напряжениях в зависимости от области применения и доступных источников питания.
Электродвигатель — это устройство, используемое для преобразования электроэнергии в механическую энергию, противоположную электрическому генератору. Они работают, используя принципы электромагнетизма, который показывает, что сила прилагается, когда в магнитном поле присутствует электрический ток. Эта сила создает крутящий момент на проволочной петле, находящейся в магнитном поле, что заставляет двигатель вращаться и выполнять полезную работу. Двигатели используются в широком спектре применений, таких как вентиляторы, электроинструменты, бытовая техника, электромобили и гибридные автомобили.
Эта сила создает крутящий момент на проволочной петле, находящейся в магнитном поле, что заставляет двигатель вращаться и выполнять полезную работу. Двигатели используются в широком спектре применений, таких как вентиляторы, электроинструменты, бытовая техника, электромобили и гибридные автомобили.
Существует множество вариантов и опций электродвигателей; например, двигатели постоянного тока – щеточные или бесщеточные, а двигатели переменного тока – асинхронные (или асинхронные) и синхронные. Двигатели могут работать при различных напряжениях в зависимости от области применения и доступных источников питания.
Работа двигателя зависит от двух свойств электрического тока. Первый заключается в том, что электрический ток, протекающий по проводу или катушке, создаст магнитное поле.
Во-вторых, изменение тока в проводнике, например, от источника переменного тока, вызовет напряжение в проводнике (самоиндуктивность) или во вторичном проводнике (взаимная индуктивность). Ток, протекающий в цепи вторичного проводника, также создает магнитное поле, как описано выше.
Ток, протекающий в цепи вторичного проводника, также создает магнитное поле, как описано выше.
Для магнита подобные полюса отталкиваются, а непохожие полюса притягиваются. Во всех двигателях конструкция использует это свойство для обеспечения непрерывного вращения ротора.
🔰 Различные части электродвигателя и их функции- Катушка якоря: Она помогает двигателю работать.
- Коммутатор: Это вращающийся интерфейс катушки якоря с неподвижной цепью.
- Сердечник якоря: Удерживает катушку якоря на месте и обеспечивает механическую поддержку.
- Источник питания: Простой двигатель обычно имеет источник питания постоянного тока. Он подает питание на якорь двигателя или катушки возбуждения.
- Полевой магнит: Магнитное поле помогает создавать крутящий момент на вращающейся катушке якоря в силу правила левой руки Флеминга.
- Щетки: Это устройство, которое проводит ток между неподвижными проводами и движущимися частями, чаще всего вращающимся валом
🔰 Как Работают Электродвигатели
Узнайте, как работает электродвигатель, основные детали, почему и где они используются, а также примеры работы. Это электрический двигатель. Это одно из самых важных устройств, когда-либо изобретенных. Эти двигатели используются повсюду — от перекачки воды, которую мы пьем, до питания лифтов и кранов, даже охлаждения атомных электростанций. Итак, мы собираемся заглянуть внутрь одного из них и подробно узнать, как именно они работают в этой статье.
Это электрический двигатель. Это одно из самых важных устройств, когда-либо изобретенных. Эти двигатели используются повсюду — от перекачки воды, которую мы пьем, до питания лифтов и кранов, даже охлаждения атомных электростанций. Итак, мы собираемся заглянуть внутрь одного из них и подробно узнать, как именно они работают в этой статье.
Чтобы лучше понять работу электродвигателя, сначала мы рассмотрим, как работает электродвигатель — в теории, затем мы проверим его на практике.
🔸 Как работает электродвигатель — в теории
Предположим, мы согнем наш провод в квадратную U-образную петлю, так что фактически через магнитное поле проходят два параллельных провода. Один из них отводит от нас электрический ток по проводу, а другой возвращает ток обратно. Поскольку ток в проводах течет в противоположных направлениях, правило левой руки Флеминга говорит нам, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включаем электричество, один из проводов будет двигаться вверх, а другой — вниз.
Если бы катушка провода могла продолжать двигаться таким образом, она вращалась бы непрерывно — и мы были бы на пути к созданию электродвигателя.
Но этого не может произойти при нашей нынешней настройке: провода быстро запутаются. И не только это, но если бы катушка могла вращаться достаточно далеко, произошло бы что-то еще. Как только катушка достигнет вертикального положения, она перевернется, так что электрический ток будет проходить через нее в противоположную сторону. Теперь силы с каждой стороны катушки поменялись бы местами. Вместо того, чтобы непрерывно вращаться в одном и том же направлении, он будет двигаться назад в том направлении, в котором только что пришел! Представьте себе электрический поезд с таким двигателем: он будет постоянно двигаться вперед и назад на месте, фактически никуда не двигаясь.
🔸 Как работает электродвигатель — на практике
Есть два способа решить эту проблему. Один из них — использовать электрический ток, который периодически меняет направление, известный как переменный ток (AC). В небольших двигателях с батарейным питанием, которые мы используем дома, лучшим решением является добавление компонента, называемого коммутатором, к концам катушки.
В небольших двигателях с батарейным питанием, которые мы используем дома, лучшим решением является добавление компонента, называемого коммутатором, к концам катушки.
В своей простейшей форме коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины, и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждой половине коммутатора. Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.
Они подают электроэнергию в коммутатор через пару незакрепленных соединителей, называемых щетками, сделанных либо из кусочков графита (мягкий углерод, похожий на «грифель» карандаша), либо из тонких кусков упругого металла, который (как следует из названия) «задевает» коммутатор. Когда коммутатор установлен, при прохождении электричества по цепи катушка будет постоянно вращаться в одном и том же направлении.
как работает электродвигательТакой простой экспериментальный мотор, как этот, не способен вырабатывать большую мощность. Мы можем увеличить вращающую силу (или крутящий момент), которую может создать двигатель, тремя способами: либо у нас может быть более мощный постоянный магнит, либо мы можем увеличить электрический ток, текущий через провод, либо мы можем сделать катушку так, чтобы она много «витков» (петель) очень тонкой проволоки вместо одного «витка» толстой проволоки. На практике в двигателе постоянный магнит также имеет изогнутую круглую форму, поэтому он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Мы можем увеличить вращающую силу (или крутящий момент), которую может создать двигатель, тремя способами: либо у нас может быть более мощный постоянный магнит, либо мы можем увеличить электрический ток, текущий через провод, либо мы можем сделать катушку так, чтобы она много «витков» (петель) очень тонкой проволоки вместо одного «витка» толстой проволоки. На практике в двигателе постоянный магнит также имеет изогнутую круглую форму, поэтому он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Хотя мы описали несколько различных деталей, вы можете представить себе двигатель как состоящий всего из двух основных компонентов:
- По краю корпуса двигателя расположен постоянный магнит (или магниты), который остается неподвижным, поэтому он называется статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью — и это называется ротором.
 Ротор также включает в себя коллектор.
Ротор также включает в себя коллектор.
 Ротор также включает в себя коллектор.
Ротор также включает в себя коллектор.🔰 Как выбрать между двигателем переменного тока и двигателем постоянного тока?
Эти два типа двигателей построены по-разному:
Наиболее принципиальным отличием является источник питания: переменный ток (однофазный или трехфазный) и постоянный ток, например, для батарей.
Скорость — еще одно отличие. Скорость двигателя постоянного тока регулируется изменением тока в двигателе, в то время как скорость двигателя переменного тока регулируется изменением частоты, обычно с помощью преобразователя частоты (вы можете читать о двухскоростью двигатели в другой стати) .
Двигатель постоянного и переменного тока🔸 Двигатели переменного тока
Двигатели переменного тока являются наиболее популярными в отрасли, так как они обладают рядом преимуществ:
- Они просты в постройке
- Они более экономичны из-за более низкого пускового потребления
- Они также более прочные и поэтому, как правило, имеют более длительный срок службы
- Они не требуют особого ухода
Из-за того, как они работают, что включает синхронизацию между вращением ротора и частотой тока, скорость двигателей переменного тока остается постоянной. Они особенно подходят для применений, требующих непрерывного движения и небольшого количества переключений передач. Поэтому этот тип двигателя идеально подходит для использования в насосах, конвейерах и вентиляторах.
Они особенно подходят для применений, требующих непрерывного движения и небольшого количества переключений передач. Поэтому этот тип двигателя идеально подходит для использования в насосах, конвейерах и вентиляторах.
Их также можно интегрировать в системы, не требующие высокой точности, если они используются с регулируемой скоростью.
С другой стороны, функции управления скоростью делают их более дорогими, чем другие двигатели.
Есть два типа двигателей переменного тока: однофазные и трехфазные.
🔷 Однофазные двигатели характеризуются:⭕ Эффективность.
⭕ Их можно использовать в бытовой электросети.
⭕ Менее промышленные, поскольку они менее мощные.
⭕ Количество полюсов, которое даст скорость вращения.
⭕ Способ крепления: фланец (B14, B5) или кронштейны (B3).
⭕ Электрическая мощность (в кВт), которая будет определять крутящий момент.
⭕ Их использование в промышленных условиях (около 80 %)
⭕ Их использование для инфраструктуры и оборудования, требующего высокой электрической мощности
⭕ Архитектура, которая позволяет передавать гораздо большую электрическую мощность, чем двигатель с однофазным напряжением
🔸 Двигатели постоянного тока
✔️ Двигатели постоянного тока также очень распространены в промышленных условиях, поскольку они обладают значительными преимуществами в зависимости от формата:
🟢 Они точны и быстры.
🟢 Пусковой момент высок.
🟢 Запуск, остановка, ускорение и разворот выполняются быстро.
🟢 Их скорость можно регулировать, изменяя напряжение питания.
🟢 Они просты в установке, даже в мобильных (работающих на батарейках) системах.
Они очень хорошо подходят для динамических применений, требующих высокой точности, особенно с точки зрения скорости, как в случае лифтов, или с точки зрения положения, как в случае роботов или станков. Они также могут быть полезны для применений, требующих высокой мощности (например, 10 000 кВт).
❌ Однако они имеют определенные недостатки в зависимости от их конструкции по сравнению с двигателями переменного тока:
🔴 Они состоят из множества деталей, которые изнашиваются и требуют дорогостоящей замены.
🔴 Они менее распространены, потому что они менее подходят для применений, требующих высокой мощности.
🔰 Наиболее распространенный тип двигателя
Существует много типов двигателей постоянного тока, но наиболее распространенными являются щеточные или бесщеточные. Существуют также вибрационные двигатели, шаговые двигатели и серводвигатели. мы должни сказат здест что бесщетоный двигатель лучше у аккумуляторного шуруповерта.
Существуют также вибрационные двигатели, шаговые двигатели и серводвигатели. мы должни сказат здест что бесщетоный двигатель лучше у аккумуляторного шуруповерта.
🔸 Бесщеточные двигатели постоянного тока
Бесщеточные двигател постоянного тока используют постоянные магниты в своем роторном узле. Они популярны на рынке хобби для применения в самолетах и наземных транспортных средствах. Они более эффективны, требуют меньшего обслуживания, производят меньше шума и имеют более высокую плотность мощности, чем двигатели постоянного тока с щеткой.
Они также могут быть серийного производства и напоминать двигатель переменного тока с постоянной частотой вращения, за исключением питания от постоянного тока. Однако есть несколько недостатков, которые включают в себя то, что ими трудно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специализированных коробок передач в приводных приложениях, что приводит к более высоким капитальным затратам, сложности и экологическим ограничениям.
🔸 Щеточные двигатели постоянного тока
Щеточные двигатели براشпостоянного тока являются одними из самых простых и встречаются во многих бытовых приборах, игрушках и автомобилях.
Они используют контактные щетки, которые соединяются с коммутатором для изменения направления тока.
Они недороги в производстве, просты в управлении и обладают отличным крутящим моментом на низких скоростях (измеряется в оборотах в минуту или оборотах в минуту).
Несколько недостатков заключаются в том, что они требуют постоянного технического обслуживания для замены изношенных щеток, имеют ограниченную скорость из-за нагрева щетки и могут генерировать электромагнитный шум от дугового разряда щетки.
🔰 Каковы стандарты энергоэффективности для электродвигателей?
Производители все чаще задумываются об энергоэффективности. Более зеленая и экологически чистая экономика — одна из целей Конференции Организации Объединенных Наций по изменению климата 2015 года, которую взяли на себя многие государства. Но прежде всего в целях ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование.
Но прежде всего в целях ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование.
Согласно исследованию Европейской комиссии, на двигатели приходится 65% промышленного потребления энергии в Европе. Поэтому принятие мер в отношении двигателей является важным шагом на пути к сокращению выбросов CO2. Комиссия даже прогнозирует, что к 2020 году можно повысить энергоэффективность двигателей европейского производства на 20–30%. В результате будет на 63 миллиона тонн меньше CO2 в атмосфере и на 135 миллиардов киловатт-часов.
Стандартные электродвигателиЕсли вы также хотите интегрировать энергоэффективные двигатели и получать экономию, внося свой вклад в развитие планеты, вам сначала нужно будет ознакомиться со стандартами энергоэффективности для двигателей в вашей стране или географическом регионе. Но будьте осторожны, эти стандарты применимы не ко всем двигателям, а только к асинхронным электродвигателям переменного тока.
🔰 Международные стандарты
Международная электротехническая комиссия (МЭК) определила классы энергоэффективности для электродвигателей, представленных на рынке, известные как код IE, которые обобщены в международном стандарте МЭК
МЭК определил четыре уровня энергоэффективности, которые определяют энергетические характеристики двигателя:
- IE1 относится к СТАНДАРТНОЙ-эффективности
- IE2 относится к ВЫСОКОЙ-эффективности
- IE3 означает ПРЕМИУМ-эффективность
- IE4, все еще находящийся в стадии изучения, обещает СУПЕР-ПРЕМИАЛЬНУЮ эффективность
МЭК также внедрила стандарт IEC 60034-2-1: 2014 для испытаний электродвигателей. Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
Товары из категорий🛠
✔️ В Европе
ЕС уже принял несколько директив, направленных на снижение энергопотребления двигателей, включая обязательство производителей размещать на рынке энергоэффективные двигатели:
Поэтому с 2011 года класс IE2 является обязательным для всех двигателей.
Класс IE3 является обязательным с января 2015 года для двигателей мощностью от 7,5 до 375 кВт (или IE2, если эти двигатели имеют преобразователь частоты).
Класс IE3 является обязательным с января 2017 года для двигателей мощностью от 0,75 до 375 кВт (или IE2, если эти двигатели имеют преобразователь частоты).
✔️ В Соединенных Штатах
В Соединенных Штатах действуют стандарты, определенные Американской ассоциацией NEMA (Национальная ассоциация производителей электротехники). С 2007 года минимальный требуемый уровень установлен на уровне IE2.
Та же классификация применима к Австралии и Новой Зеландии.
✔️ Азия
В Китае корейские стандарты MEPS (Минимальный стандарт энергоэффективности) применяются к малым и средним трехфазным асинхронным двигателям с 2002 года (GB 18693). В 2012 году стандарты MEPS были согласованы со стандартами IEC, перейдя от IE1 к IE2, а теперь и к IE3.
Япония согласовала свои национальные правила с классами эффективности IEC и включила электродвигатели IE2 и IE3 в свою программу Top Runner в 2014 году. Представленная в 1999 году программа Top Runner заставляет японских производителей постоянно предлагать на рынке новые модели, которые являются более энергоэффективными, чем предыдущие поколения, тем самым стимулируя эмуляцию и инновации в области энергетики.
Представленная в 1999 году программа Top Runner заставляет японских производителей постоянно предлагать на рынке новые модели, которые являются более энергоэффективными, чем предыдущие поколения, тем самым стимулируя эмуляцию и инновации в области энергетики.
В Индии с 2009 года действует знак сравнительной эффективности, а с 2012 года — национальный стандарт на уровне IE2.
Каковы критерии выбора электродвигателя?
Электродвигатели позволяют выполнять различные типы движения: быстрое, точное, непрерывное, с переключением передач или без него и т. Д. Для всех этих приложений требуются собственные двигатели.
Применение электродвигателейВо-первых, вы должны выбрать одну из трех основных групп электродвигателей:
💠 Асинхронный двигатель переменного тока (однофазный или трехфазный)
💠 Синхронный двигатель: двигатель постоянного тока (постоянного тока), бесщеточный и др.
Чтобы выбрать между этими группами, необходимо определить тип требуемого приложения, поскольку это повлияет на ваш выбор:
Если вы хотите, чтобы ваш двигатель работал непрерывно и с небольшим количеством переключений передач, вам следует выбрать асинхронный двигатель. Для динамических приложений очень важно иметь синхронный двигатель.Наконец, если вам требуется точное позиционирование, вам следует выбрать шаговый двигатель.
Для динамических приложений очень важно иметь синхронный двигатель.Наконец, если вам требуется точное позиционирование, вам следует выбрать шаговый двигатель.
В зависимости от требуемого движения вам также потребуется определить технические характеристики и размер двигателя:
💠 Для определения технических характеристик потребуется определить мощность, крутящий момент и скорость двигателя.
💠 Чтобы определить размер, вы должны знать, сколько места займет двигатель и как он будет установлен (то есть как он будет закреплен в системе).
При выборе размеров и прочности двигателя вы также должны учитывать производственную среду, в которой двигатель будет работать:
Существует формат, адаптированный для любого типа среды (взрывоопасная, влажная, коррозионная, высокая температура и т. Д.). Для суровых условий окружающей среды существуют двигатели с усиленным, водонепроницаемым, ударопрочным или грязеотталкивающим корпусом.
Наконец, в последние годы энергоэффективность стала важным фактором, который необходимо учитывать при выборе двигателя. Электродвигатель, который потребляет меньше энергии, будет иметь низкое энергетическое воздействие, что снизит его стоимость энергии.
Электродвигатель, который потребляет меньше энергии, будет иметь низкое энергетическое воздействие, что снизит его стоимость энергии.
Использование электродвигателя
Электродвигатели используются в самых разных областях применения. Некоторые из них перечислены ниже:
💠 Дрели
💠 Жесткие Диски
💠 Водяные Насосы
💠 Стиральные Машины
💠 Промышленное Оборудование
Вы можете ожидать, что эффективность работающего двигателя составит около 70-85%, так как оставшаяся энергия тратится на производство тепла и издаваемые звуки.
Что следует учитывать при покупке двигателя:
При выборе двигателя необходимо обратить внимание на несколько характеристик, но наиболее важными являются напряжение, ток, крутящий момент и скорость (об / мин).
✔️ Ток
это то, что питает двигатель, и слишком большой ток приведет к его повреждению. Для двигателей постоянного тока важны рабочий ток и ток останова. Рабочий ток — это средняя величина тока, которую двигатель может потреблять при типичном крутящем моменте. Ток останова обеспечивает достаточный крутящий момент для двигателя, чтобы работать со скоростью останова, или 0 об / мин. Это максимальный ток, который двигатель может потреблять, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает с напряжением выше номинального, чтобы катушки не плавились.
Ток останова обеспечивает достаточный крутящий момент для двигателя, чтобы работать со скоростью останова, или 0 об / мин. Это максимальный ток, который двигатель может потреблять, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает с напряжением выше номинального, чтобы катушки не плавились.
✔️ Напряжение
Напряжение используется для поддержания тока сети, протекающего в одном направлении, и для преодоления обратного тока. Чем выше напряжение, тем выше крутящий момент. Номинальное напряжение двигателя постоянного тока указывает наиболее эффективное напряжение во время работы. Обязательно подавайте рекомендуемое напряжение. Если вы подадите слишком мало вольт, двигатель не будет работать, в то время как слишком много вольт может привести к короткому замыканию обмоток, что приведет к потере мощности или полному разрушению.
✔️ Значения работы и остановки/ крутящий момент
Значения работы и остановки также необходимо учитывать с учетом крутящего момента. Рабочий крутящий момент — это величина крутящего момента, на которую был рассчитан двигатель, а крутящий момент остановки — это величина крутящего момента, создаваемого при подаче мощности от скорости остановки. Вы всегда должны обращать внимание на необходимый рабочий крутящий момент, но в некоторых приложениях вам потребуется знать, как далеко вы можете продвинуть двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент остановки достаточно силен, чтобы поднять вес робота. В данном случае крутящий момент важнее скорости.
Рабочий крутящий момент — это величина крутящего момента, на которую был рассчитан двигатель, а крутящий момент остановки — это величина крутящего момента, создаваемого при подаче мощности от скорости остановки. Вы всегда должны обращать внимание на необходимый рабочий крутящий момент, но в некоторых приложениях вам потребуется знать, как далеко вы можете продвинуть двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент остановки достаточно силен, чтобы поднять вес робота. В данном случае крутящий момент важнее скорости.
✔️ Скорость (об/мин)
Скорость (об / мин) может быть сложной для двигателей. Общее правило заключается в том, что двигатели наиболее эффективно работают на самых высоких скоростях, но это не всегда возможно, если требуется передача. Добавление шестерен снизит эффективность двигателя, поэтому примите во внимание снижение скорости и крутящего момента.
Это основные принципы, которые следует учитывать при выборе двигателя. Подумайте о назначении приложения и о том, какой ток он использует, чтобы выбрать подходящий тип двигателя. Технические характеристики приложения, такие как напряжение, ток, крутящий момент и скорость, будут определять, какой двигатель является наиболее подходящим, поэтому обязательно обратите внимание на его требования.
💠 Какие основные качества следует учитывать в двигателе электроинструмента?
Что важно учитывать при работе с двигателями электроинструментов, так это: щетки, крутящий момент, скорость и род тока.
FAQ❓
🔘 Какие основные качества следует учитывать в двигателе электроинструмента?
Что важно учитывать при работе с двигателями электроинструментов, так это: щетки, крутящий момент, скорость и род тока.
🔘 В чем разница между двигателями переменного и постоянного тока?
Двигатель постоянного или постоянного тока работает от батареи или накопленной
энергии, а двигатель переменного тока подключается к электрической сети.
🔘 Какие преимущества предлагают двухскоростные двигатели?
Они практически более эффективны и производительны, более универсальны и многофункциональны.
🔘 Какой момент затяжки?
В основном это означает силу, прилагаемую к затяжке болта или гайки.
Заключение🧾
Здесь изложены основные принципы, которые следует учитывать при выборе двигателя. Подумайте о назначении приложения и о том, какой ток он использует, чтобы выбрать правильный тип двигателя.
Все о двигателях | Конструкция машин
На первый взгляд двигатели кажутся сложными машинами, и это действительно так. Но принцип действия, электромагнетизм, относительно прост, его понимают даже старшеклассники. Помимо различий, сегодняшние различные моторные технологии по сути очень похожи и вполне понятны.
Происхождение первых двигателей — машин, преобразующих электрическую энергию в механическую — можно проследить до конструкций, придуманных Майклом Фарадеем. В 1831 году Фарадей сформулировал основные понятия об электромагнитной индукции, отметив, что проводник с током в магнитном поле воспринимает силу, пропорциональную напряженности поля и проходящего через него тока.
В 1831 году Фарадей сформулировал основные понятия об электромагнитной индукции, отметив, что проводник с током в магнитном поле воспринимает силу, пропорциональную напряженности поля и проходящего через него тока.
Конструкция электродвигателя как тогда, так и сейчас основана на размещении проводников в магнитном поле. Проводники, разумеется, имеют форму обмоток с множеством витков провода, каждый из которых вносит свой вклад в интенсивность электромагнитного воздействия. Чем больше ток, указал Фарадей, тем больше силы (крутящего момента) можно ожидать. Таким образом, движение, конечная цель, является результатом двух магнитных полей (одно на роторе, другое на статоре), притягивающих друг друга. Эта концепция лежит в основе всех конструкций двигателей постоянного и переменного тока и является отправной точкой для современной техники движения.
Азбука переменного тока
Двигатели переменного тока (переменного тока) являются наиболее широко используемыми двигателями в мире. По сути, это устройства с постоянной скоростью, что определяется количеством магнитных полюсов и входной частотой. Вообще есть два типа двигателей переменного тока — асинхронные и синхронные.
По сути, это устройства с постоянной скоростью, что определяется количеством магнитных полюсов и входной частотой. Вообще есть два типа двигателей переменного тока — асинхронные и синхронные.
Асинхронные двигатели можно рассматривать как тип трансформатора, первичная обмотка которого соответствует статору, а вторичная — ротору. Приложение напряжения к «первичке» делает две вещи: оно пропускает ток через статор, индуцируя ток в роторе. Другими словами, он создает магнитное поле в статоре, индуцируя второе поле в роторе. Взаимодействие этих двух полей заставляет ротор двигаться.
Скорость магнитного поля вокруг статора определяет скорость ротора. Ротор будет пытаться следовать за полем статора, но будет «скользить», особенно при приложении нагрузки. Поэтому асинхронные двигатели всегда работают медленнее, чем вращающееся поле статора.
Статор асинхронного двигателя состоит из стальных пластин и витков медной проволоки. Ротор, с другой стороны, обычно изготавливается из сложенных друг на друга пластин с большими пазами по периферии. В роторе с «беличьей клеткой» пазы заполнены медными или алюминиевыми стержнями, закороченными токопроводящими торцевыми крышками. Эта «цельная» отливка обычно включает встроенные лопасти вентилятора для циркуляции воздуха для охлаждения.
В роторе с «беличьей клеткой» пазы заполнены медными или алюминиевыми стержнями, закороченными токопроводящими торцевыми крышками. Эта «цельная» отливка обычно включает встроенные лопасти вентилятора для циркуляции воздуха для охлаждения.
Стандартные асинхронные двигатели работают с «постоянной» скоростью, определяемой стандартной частотой сети. Однако есть способы контролировать скорость. Приводы на основе микропроцессора, использующие технологию векторного управления, например, манипулируют величиной магнитного потока в полях ротора и статора, достигая своего рода отклика с переменным скольжением. При наличии соответствующего датчика обратной связи этот метод управления применим даже в приложениях позиционирования.
Хотя об очень требовательных задачах, таких как быстрое старт-стоп позиционирование, не может быть и речи, тем не менее, некоторые приложения индексации выполнимы. Однако ограничивающим фактором является тепло. По мере того, как размер двигателя увеличивается, чтобы контролировать температуру — более крупные двигатели лучше охлаждаются — отношение крутящего момента к инерции становится непомерно высоким для скорости.
Преимущества асинхронных двигателей хорошо известны, в том числе низкая начальная стоимость, наличие стандартных размеров, надежность, бесшумная работа без вибраций.
Синхронные двигатели аналогичны асинхронным двигателям, отличаясь в основном конструкцией ротора. Роторы предназначены для вращения с той же скоростью, что и поле статора, отсюда и название «синхронный». В основном существует два типа синхронных двигателей: с самовозбуждением (например, асинхронные двигатели) и с прямым возбуждением с использованием постоянных магнитов.
Синхронные двигатели с самовозбуждением (иногда называемые реактивными синхронными двигателями) используют ротор с насечками или зубьями на периферии. Количество пазов соответствует количеству полюсов статора. Часто выемки или зубцы называют «выступающими полюсами», отражая тот факт, что они создают легкий путь, почти ручку, для поля магнитного потока, тем самым позволяя ротору блокироваться и вращаться с той же скоростью, что и вращающееся поле.
Синхронные двигатели с прямым возбуждением (иногда называемые гистерезисными синхронными двигателями или синхронными двигателями переменного тока с постоянными магнитами) используют ротор из сплава с постоянными магнитами. Постоянные полюса, по сути, являются «выступающими полюсами» и, следовательно, предотвращают скольжение.
Продолжить на стр. 2
Важным фактором для синхронных двигателей является «угол сцепления», небольшое расстояние, на которое ротор отстает от поля статора. Этот угол увеличивается с нагрузкой, и если нагрузка выходит за пределы возможностей двигателя, ротор застревает, в конечном итоге выходя из синхронизма.
Синхронные двигатели, как правило, работают в разомкнутом контуре, обеспечивая абсолютную постоянную скорость для заданной нагрузки в пределах угла сцепления или «вытягивающего» крутящего момента. Однако двигатели не являются самозапускающимися, для них требуются конденсаторные или пусковые обмотки с расщепленной фазой (или специальные средства управления), которые постепенно увеличивают частоту и напряжение, чтобы заставить ротор двигаться.
Синхронные двигатели могут использоваться для управления скоростью с добавлением устройства обратной связи. Они также обеспечивают борьбу с переносчиками. В целом, однако, ротор больше, чем у эквивалентного серводвигателя, что означает более медленную реакцию для увеличивающихся приложений.
Типы двигателей постоянного тока
Существует много типов двигателей постоянного тока — щеточные и бесщеточные, шаговые, с параллельным и последовательным возбуждением, — но все они имеют одну общую черту: простое управление скоростью. Это делает их естественным образом подходящими для сервоприводов позиционирования и управления скоростью.
Двигатели с параллельным возбуждением имеют параллельные обмотки ротора и статора. Статор может быть подключен к тому же источнику питания, что и ротор, или может возбуждаться отдельно. При раздельном питании напряжение ротора можно изменять относительно постоянного напряжения статора для регулировки скорости.
Параллельное или шунтирующее соединение между ротором и статором обеспечивает относительно плоскую кривую скорость-момент с хорошей регулировкой скорости в широком диапазоне нагрузок. Однако из-за размагничивания двигателям постоянного тока с параллельной обмоткой не хватает пускового момента по сравнению с другими типами обмотки постоянного тока.
Однако из-за размагничивания двигателям постоянного тока с параллельной обмоткой не хватает пускового момента по сравнению с другими типами обмотки постоянного тока.
Двигатели с последовательным возбуждением обмотки ротора и статора расположены последовательно. Это создает два сильных поля, создающих высокий пусковой крутящий момент. Типичные области применения включают краны и подъемники; приложения, которых следует избегать, — это те, в которых двигатель может потерять нагрузку и «убежать».
Двигатели с компаундной обмоткой , напротив, используют как параллельное, так и последовательное соединение. Соотношение между полями ротора и статора определяет форму кривой скорость-момент. Как правило, небольшие составные двигатели имеют сильное шунтирующее поле и слабое последовательное поле, что приводит к высокому пусковому моменту и относительно плоской реакции скорости на крутящий момент. Реверсивные приложения несколько непрактичны, потому что необходимо переключать полярность обеих обмоток, что требует больших силовых цепей.
Займитесь позиционированием
Для позиционирования требуются специальные двигатели. Шаговый двигатель, вектор переменного тока, сервопривод постоянного тока и бесщеточный двигатель постоянного и переменного тока являются одними из наиболее распространенных вариантов.
Шаговые двигатели — это электромеханические устройства, которые преобразуют цифровые входы (с помощью контроллера) в аналоговые движения. Хотя существует много типов — с электромагнитным управлением, с переменным магнитным сопротивлением, с постоянным магнитом и с синхронной индукцией — все они имеют фиксированные угловые приращения при подаче питания запрограммированным образом. Другими словами, вместо непрерывного движения шаговый двигатель обеспечивает серию дискретных угловых движений одинаковой величины.
Шаговые двигатели особенно хорошо подходят для приложений, в которых управляющие сигналы представляют собой последовательности импульсов. Один импульс заставляет двигатель увеличивать один угол движения; десять импульсов соответствуют десяти приращениям и так далее.
В большинстве шаговых двигателей используется разомкнутый контур, который, к сожалению, вызывает колебания. Для лечения обычно требуется сложная схема «замыкания петли» или устройство обратной связи. Даже при этом мощность шаговых двигателей ограничена примерно 1 л.с. и 2000 об/мин.
Работу разомкнутой системы лучше всего проиллюстрировать на примере. Предположим, что шаговый двигатель используется в приложении для сортировки контейнеров. Все происходит так, как ожидалось, пока двигатель может отщелкивать одно приращение за импульс. Но если механизм заедает и шаговый двигатель не может двигаться, контроллер может не знать о проблеме и будет продолжать посылать импульсы, которые по сути игнорируются. Нетрудно представить, что в конечном итоге, если система потеряет слишком много шагов, она может поместить в одну корзину предметы, которые на самом деле предназначены для другой.
Двигатели постоянного тока с постоянными магнитами (PMDC) являются популярным выбором для инкрементных (пуск-стоп) приложений. И с соответствующей обратной связью они весьма эффективны в сервоуправлении с обратной связью.
И с соответствующей обратной связью они весьма эффективны в сервоуправлении с обратной связью.
Магнитный двигатель двигателя постоянного тока с постоянными магнитами состоит из поля статора, исходящего от постоянных магнитов, и поля ротора, индуцированного током, проходящим через коммутатор или схему переключения в узел ротора. Поле статора неподвижно, а поле ротора движется. Каждый раз, когда два поля почти выровнены, коммутатор переключает ток ротора. Пока поле ротора не сравняется с полем статора, ротор будет двигаться. Скорость вращения, насколько быстро вращается ротор, зависит от силы поля ротора; чем больше напряжение, тем быстрее вращается ротор.
Продолжить на стр. 3
Двигатели постоянного тока имеют линейные характеристики скорость-момент с относительно высоким пусковым (ускоряющим) крутящим моментом. Линейность обязана постоянным магнитам; моментообразующий поток в поле статора остается постоянным на всех скоростях. Двигатели PMDC, рассчитанные на фунт за фунт, довольно мощные и подходят для приложений быстрого позиционирования.
Бесщеточные сервоприводы могут работать от постоянного или переменного тока в зависимости от устройства обратной связи и схемы управления. Например, с датчиками Холла трехфазный бесщеточный двигатель обычно одновременно возбуждает две из трех обмоток двигателя. Чтобы совершить один механический оборот, контроллер должен пройти через шесть секций коммутации, подавая на каждую постоянную нагрузку. Величина постоянного тока прямо пропорциональна рабочей скорости, отсюда и термин «бесщеточный двигатель постоянного тока».
Обратная связь энкодера используется в приложениях, которым требуются данные о положении. Некоторые энкодеры доступны с выходами Холла, которые используются для коммутации.
Обратная связь резольвера также предоставляет данные о положении, но метод управления другой. Здесь к обмоткам двигателя применяется синусоидальная форма волны, что приводит к появлению термина «бесщеточный двигатель переменного тока». Преимущество перед бесщеточным двигателем постоянного тока заключается в том, что при том же крутящем моменте бесщеточный двигатель переменного тока будет потреблять меньший ток. Таким образом, контроллер имеет тенденцию быть меньше и дешевле. Этого следует ожидать, когда трехфазная обмотка питается трехфазным синусоидальным током.
Таким образом, контроллер имеет тенденцию быть меньше и дешевле. Этого следует ожидать, когда трехфазная обмотка питается трехфазным синусоидальным током.
Бесколлекторные двигатели быстрые, производят большой крутящий момент при небольшом размере и имеют малую инерцию, что обеспечивает более быстрое ускорение. Они также хороши на низких скоростях (вплоть до нулевой скорости) и обеспечивают длительный и надежный срок службы без обслуживания в требовательных приложениях.
Джон Мазуркевич — директор по разработке двигателей Baldor Electric Co., Ft. Smith, Ark.
Связанные статьи
Электромагнитные муфты
С учетом электромагнитных задержек
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Посмотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Похожие темы:
- синхронный двигатель линейный двигатель гистерезис двигателя серводвигатель серийный двигатель
См. всю связанную информацию →
всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что по обмоткам статора протекает набор трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент  е. на одну шестую периода позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
е. на одну шестую периода позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Электричество: короткие замыкания и постоянные токи
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент
Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент 
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для мощных двигателей мощностью примерно до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания.